
A Monte Carlo Study of Integrating Discrete Choice Models and
Neural Networks in Transportation Decision-Making
Fuming Zhang
a
Business School, University of Shanghai for Science and Technology, Shanghai, China
Keywords: Hybrid Discrete Choice Model, Neural Network with Attention, Multinomial Logit (MNL), Monte Carlo
Simulation, Travel Behavior Modeling.
Abstract: With the rapid development of urban transportation systems and the increasing diversity of residents' travel
behaviors, accurately modeling individuals' choice behaviors among different travel modes has become an
important topic in traffic behavior research. The traditional multinomial Logit (MNL) discrete choice model
is widely used in travel decision modeling due to its simple structure and good interpretability. However, the
MNL model has certain limitations when dealing with nonlinear preference relations and behavioral
heterogeneity. To this end, this paper proposes a hybrid discrete choice model (HDCM) framework that
integrates neural networks (NNs) and attention mechanisms. On the basis of retaining the interpretability of
variables, the HDCM enhances the expression ability of complex behavioral patterns. This paper evaluates
the model performance by constructing simulation data containing standard normal explanatory variables and
conducting Monte Carlo experiments. The experimental results show that the HDCM outperforms the MNL
model and the pure NN model in terms of parameter estimation accuracy, error indicators (mean squared error
(MSE), mean absolute error (MAE)), and confidence interval coverage, demonstrating stronger stability and
adaptability. This research provides a more flexible and effective analytical tool for modeling complex travel
decision-making behaviors and has a promising application prospect.
1 INTRODUCTION
In the field of travel behavior modeling, the Discrete
Choice Model (DCM) is widely used to describe the
choice decision-making process of individuals among
multiple transportation modes, especially the
Multinomial Logit model (MNL) (Wong & Farooq,
2021; Hausman & McFadden, 1984). It has become
the mainstream of research because of its simple
derivation, efficient estimation and clear economic
implications of parameters. However, the traditional
MNL, based on the setting of a linear utility function
and the assumption of independent independence
(IIA), shows certain limitations when dealing with the
nonlinear preferences, diverse behavioral
characteristics, and individual heterogeneity reflected
in real traffic decisions, and is difficult to capture the
complex logic of human behavior (Bourguignon et
al., 2007; Kashifi et al., 2022).
In recent years, with the rapid development of
deep learning technology, neural networks (NNs)
a
https://orcid.org/0009-0000-5929-8735
have gained extensive attention in travel behavior
modeling due to their powerful nonlinear expression
capabilities (Omrani, 2015; Wang & Ross, 2018).
Their flexible structure helps to depict complex
behavioral response patterns, but it also faces
problems such as difficult parameter interpretation
and unclear behavioral inference (Li et al., 2010;
Bhat, 2003). To integrate the advantages of both, this
paper proposes a multi-Logit hybrid model
framework that introduces an attention mechanism
NN, which enhances the nonlinear fitting ability of
the Logit model while maintaining its interpretability.
The main contributions of this paper include: (1)
Constructing a hybrid modeling structure that is both
interpretable and flexible; (2) The effectiveness of it
in nonlinear decision modeling was verified through
systematic experiments, providing a new
methodological basis and practical reference for the
modeling of transportation mode selection.
522
Zhang, F.
A Monte Carlo Study of Integrating Discrete Choice Models and Neural Networks in Transportation Decision-Making.
DOI: 10.5220/0014362200004718
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2025), pages 522-526
ISBN: 978-989-758-792-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

2 MODEL ARCHITECTURE
2.1 Overall Model Framework
Based on the traditional MNL model, this paper
integrates NNs and attention mechanisms to propose
a hybrid discrete selection model for transportation
mode selection, aiming to better describe the
nonlinear characteristics and individual differences in
travel behavior (Krishnapuram et al., 2005).
The model structure is shown in Figure 1, it first
sets the real parameter matrix to generate simulation
data containing constant terms and two standard
normal explanatory variables. For each non-reference
option, an independent neural network is constructed,
with a structure consisting of an attention layer and
two fully connected networks, and the selection
probability is calculated through the Softmax
function. Subsequently, 100 rounds of simulation
experiments were conducted, and the MNL model
was used for parameter estimation. The model
performance was evaluated through indicators such
as deviation, mean squared error (MSE), mean
absolute error (MAE), T-statistic, and confidence
interval coverage. The results show that this method
enhances the modeling ability of nonlinear
relationships while retaining interpretability.
Figure 1: Architecture of the Hybrid Discrete Choice Model with Attention-Based Neural Networks. (Picture credit: Original)
2.2 Design of Neural Network-Based
Utility Function
In this paper, NN with an attention mechanism is
adopted to conduct nonlinear modeling of the utility
function. Each alternative corresponds to an
independent network, which includes an input layer,
an attention layer, two hidden layers (64 RELU-
activated neurons in each layer), and an output layer.
During the training process, the MSE is adopted
as the loss function, the optimizer is Adam, the
learning rate is set at 0.01, and each round of
experimental training is conducted 1000 times. This
structure enhances the model's ability to fit complex
behavioral patterns while retaining the importance of
explanatory variables, providing greater flexibility
for travel choice modeling.
2.3 Monte Carlo Simulation Procedure
To verify the estimation performance of the discrete
selection model based on NNs, an MC simulation
experiment is designed in this paper (Keane &
Wolpin, 1994). Data generation is based on multiple
Logit Settings. The workflow of the Monte Carlo
Simulation is shown in Figure 2. Individuals choose
among three options, and the utility of each option is
modeled by an NN containing three explanatory
variables (including intercept terms). Set the real
parameters to a fixed matrix and the sample size to
In each round of simulation, the input
variable X (N × K) is generated. The utility is
calculated using an NN and the selection probability
is obtained through Softmax to generate the selection
result y. Data does not require missing processing.
Preprocessing includes feature normalization and
format conversion to adapt to NNs and Logit models.
A Monte Carlo Study of Integrating Discrete Choice Models and Neural Networks in Transportation Decision-Making
523
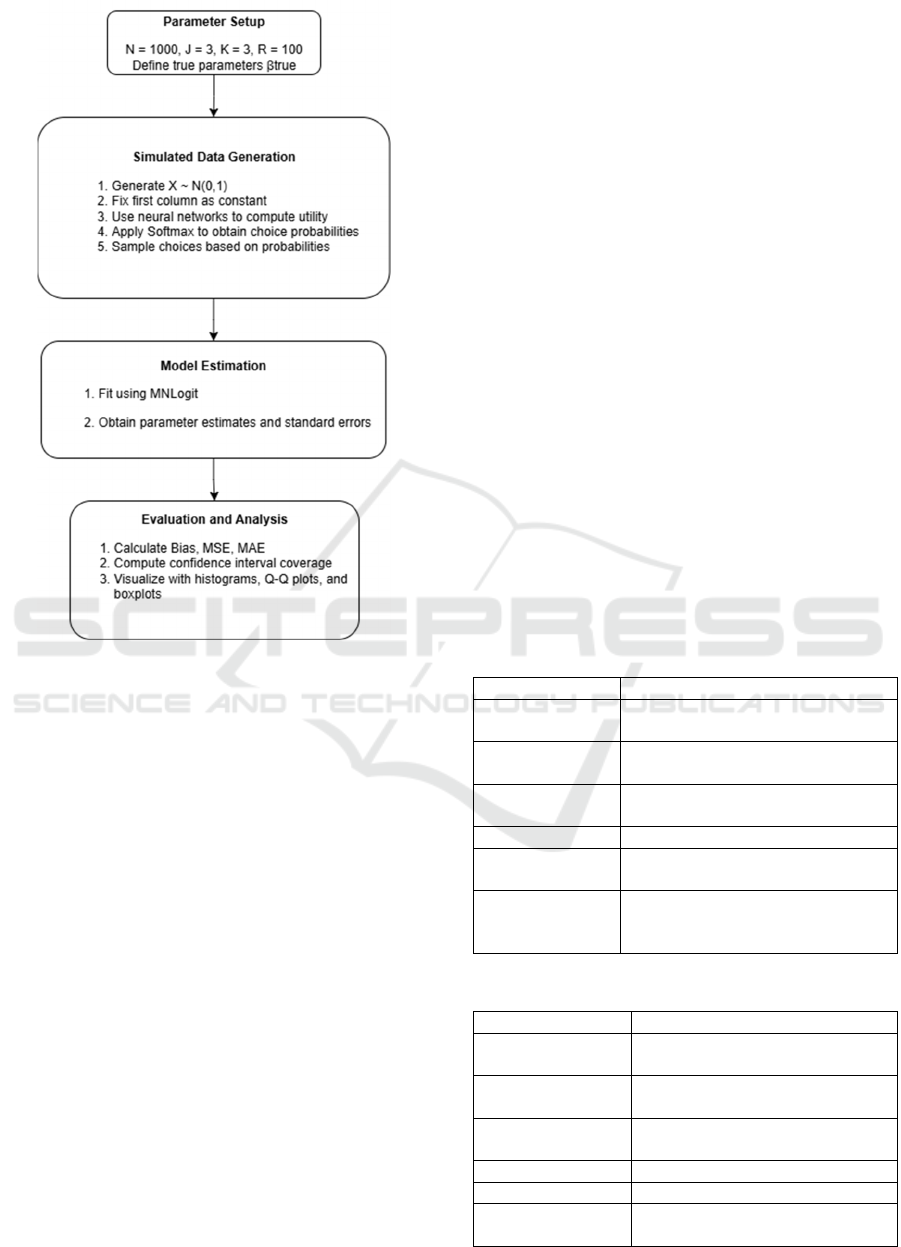
Figure 2: Workflow of the Monte Carlo Simulation for the
Hybrid Discrete Choice Model. (Picture credit: Original)
3 DATASET AND EXPERIMENTS
3.1 Dataset
To verify the estimation performance of the discrete
selection model based on NN, this paper designs a
Monte Carlo experiment based on multiple Logit
Settings. Each individual makes a choice among three
travel options, and the utility of each option is
estimated by an independent NN. The input contains
three explanatory variables. The real parameters are
set to a fixed matrix, and the sample size is set to
1000.
In each round of simulation, an input variable
matrix X∈R
×
(N 1000,K3). The utility of
each option is calculated through NN, and the
selection probability is generated in combination with
the Softmax function. Then, the selection result is
obtained through a probability simulation.
The simulation data does not require missing
value processing. The main preprocessing step is
feature normalization to adapt to the NN training and
multiple Logit model estimation processes.
3.2 Experimental Setup
This study conducted experiments on a local
computer. The operating environment was Windows
11, equipped with an NVIDIA GeForce RTX 4080
notebook GPU, an Intel64 architecture processor, and
34GB of memory (18GB is available), as summarized
in Table 1. The experiment was mainly programmed
using Python 3.12 (partially 3.10), and the core
dependent libraries are also listed in Table 1.
The neural network structure consists of two fully
connected MLP layers (64 neurons per layer, ReLU
activated), with a separate network trained for each
non-reference option and an attention mechanism to
weight the input features. The training strategy is
detailed in Table 2.
The Monte Carlo experiment generates 1,000
samples in each round and repeats for 100 rounds.
Simulation settings are shown in Table 3. Parameter
estimation is conducted using the MNLogit model in
the statsmodels library for maximum likelihood
estimation. The evaluation metrics include MSE,
MAE, bias, and 95% confidence interval coverage.
Table 1. Runtime Environment and Core Library
Versions.
Com
p
onent Descri
p
tion
Operating
System
Windows 11
CPU
Intel64 Family 6 Model 183
(AMD64 architecture)
GPU
NVIDIA GeForce RTX 4080
La
p
to
p
GPU
Memory 34.08 GB total, 18.07 GB available
Programming
Lan
g
ua
g
e
Python 3.12 (some experiments
run in 3.10
)
Core Libraries
PyTorch 2.0, statsmodels 0.14,
numpy 1.24, seaborn 0.12, pandas,
mat
p
lotlib
Table 2: Neural Network Training Settings.
Item Configuration
Network Structure
Two-layer MLP, 64 neurons per
la
y
e
r
Activation
Function
ReLU
Attention
Mechanism
Applied to input features of each
option
Loss Function MSE
O
p
timize
r
Adam, learnin
g
rate = 0.01
Number of
Networks
2 (one for each non-reference
alternative)
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
524
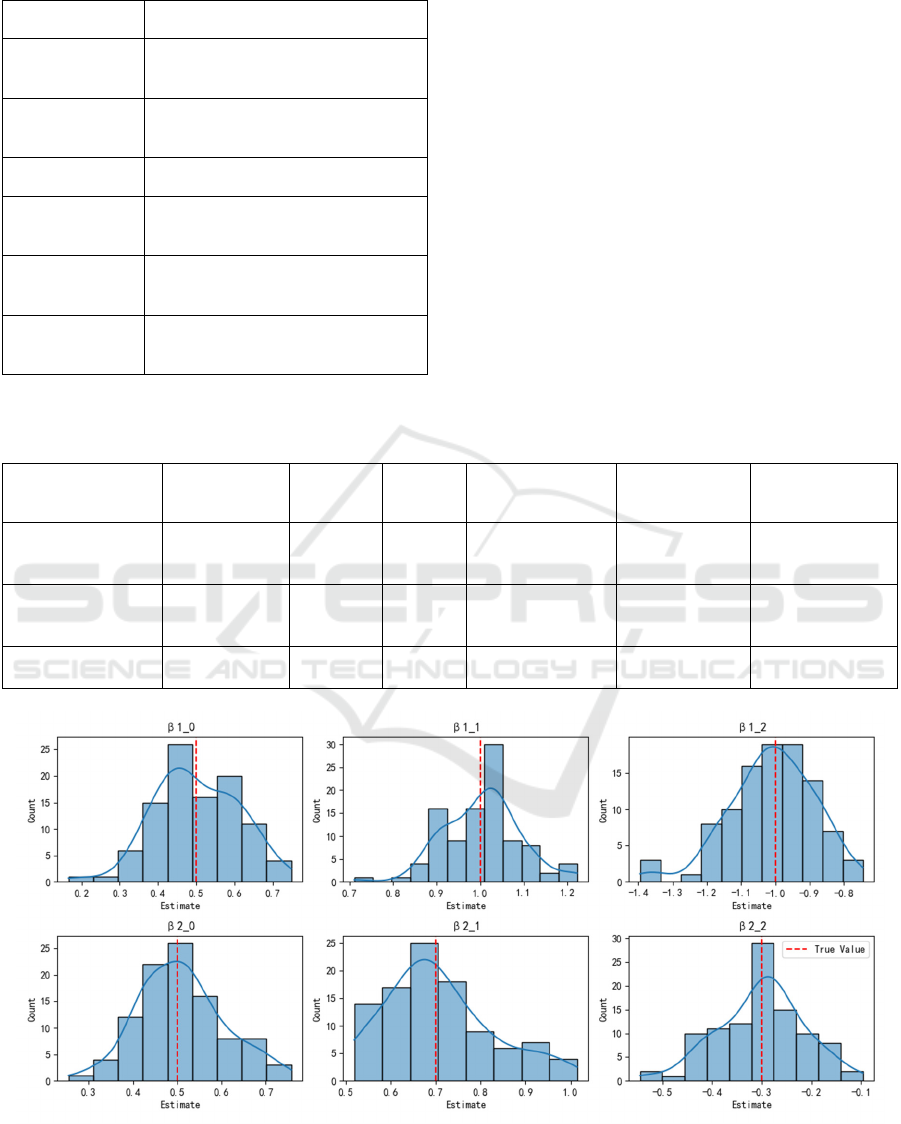
Table 3: Monte Carlo Simulation Settings.
Item Descri
p
tion
Sample Size (N)
1000 individuals per simulation
roun
d
Number of
Choices
(
J
)
3
Repetitions (R) 100 simulation rounds
Simulation
Process
New data generation and MNLogit
estimation each roun
d
Estimation
Metho
d
Multinomial Logit via statsmodels
(MLE)
Evaluation
Metrics
MSE, MAE, Bias, and 95%
Confidence Interval Coverage Rate
3.3 Experimental Results and Analysis
The fusion model combines NN with multiple Logit
frameworks, possessing both nonlinear modeling
capabilities and parameter interpretability. The
experimental results show that this model performs
excellently in terms of parameter estimation
accuracy, error control and statistical properties. The
MSE is approximately 0.010, and the MAE is about
0.08. The 95% confidence interval coverage rate
remained stable above 0.95, demonstrating good
reliability. Compared with the pure NN model, the
fusion model can capture nonlinear structures more
effectively while retaining the explanatory power of
parameter behaviors, and is suitable for modeling
complex travel choice behaviors. The comparison
results of model performance are detailed in Table 4,
and the parameter estimation performance is shown
in Figures 3, Figure 4.
Table 4: Comparison of Model Performance in Monte Carlo Experiments.
Model Avg. MSE
Avg.
MAE
Avg.
Bias
Mean Coverage
Rate
Interpretability
Nonlinear
Modeling
Hybrid Model
(Ours)
≈ 0.0100 ≈ 0.079
< 0.01
≥ 0.95
Moderate–
High
Strong
Neural Network
Only
0.0100 ±
0.0003
0.0798 < 0.01
≈0.95
Poor Strong
Multinomial Logit 0.0121 0.0868 < 0.02 ≈ 0.95 Strong Weak
Figure 3: Distribution of Estimated Parameters. (Picture credit: Original)
A Monte Carlo Study of Integrating Discrete Choice Models and Neural Networks in Transportation Decision-Making
525
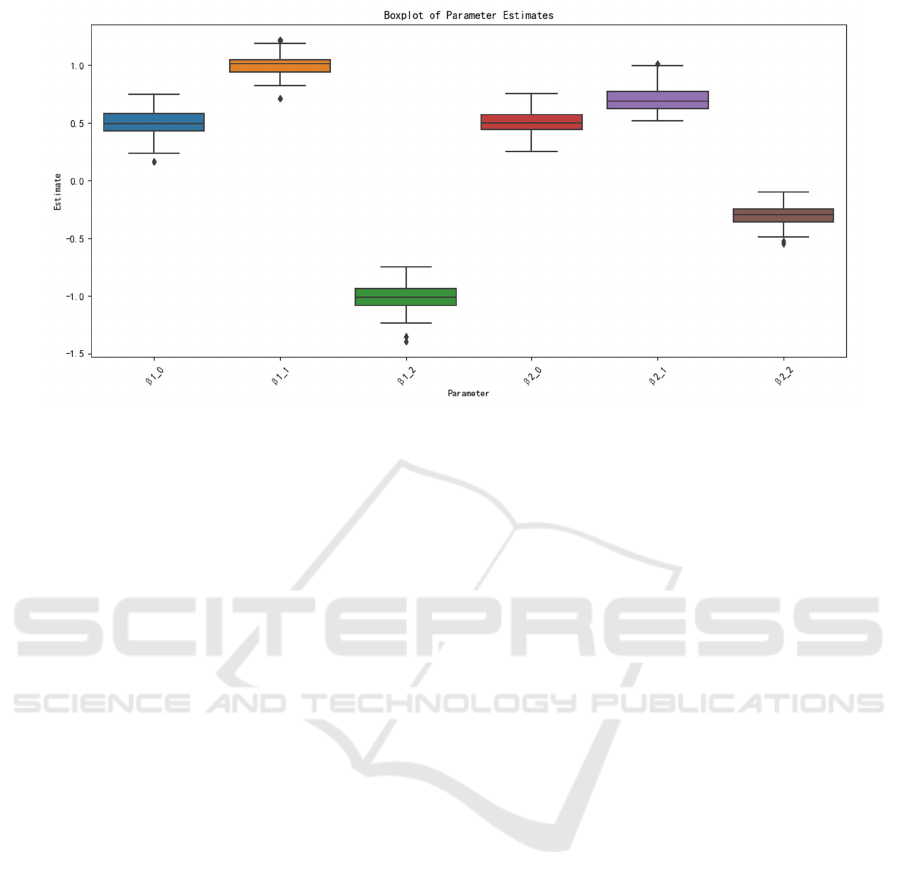
Figure 4: Boxplots of Estimated Parameter. (Picture credit: Original).
4 CONCLUSIONS
According to the Monte Carlo simulation experiment
results of this paper, the proposed hybrid discrete
selection model integrating the attention mechanism
neural network performs excellently in terms of
parameter estimation accuracy, stability and
confidence interval coverage. Compared with the
traditional MNL model, this model significantly
enhances its ability to describe nonlinear utility
structures and individual differences while
maintaining strong interpretability. In the experiment,
the estimation deviations of each parameter were
generally less than 0.01. Both MSE and MAE were
lower than those of the benchmark model, and the
coverage rate of the 95% confidence interval
generally reached or exceeded 0.95, indicating that
the model has good statistical properties and practical
application potential. In conclusion, this method
provides an effective tool for traffic behavior
modeling, especially suitable for the analysis of travel
choices in complex decision-making scenarios.
REFERENCES
Bhat, C. R. (2003). Simulation estimation of mixed discrete
choice models using randomized and scrambled Halton
sequences. Transportation Research Part B:
Methodological, 37(9), 837–855.
Bourguignon, F., Fournier, M., & Gurgand, M. (2007).
Selection bias corrections based on the multinomial
logit model: Monte Carlo comparisons. Journal of
Economic Surveys, 21(1), 174–205.
Hausman, J., & McFadden, D. (1984). Specification tests
for the multinomial logit model. Econometrica: Journal
of the Econometric Society, 1219–1240.
Kashifi, M. T., Jamal, A., Kashefi, M. S., Almoshaogeh, M.,
& Rahman, S. M. (2022). Predicting the travel mode
choice with interpretable machine learning techniques:
A comparative study. Travel Behaviour and Society, 29,
279–296.
Keane, M. P., & Wolpin, K. I. (1994). The solution and
estimation of discrete choice dynamic programming
models by simulation and interpolation: Monte Carlo
evidence. The Review of Economics and Statistics,
648–672.
Krishnapuram, B., Carin, L., Figueiredo, M. A., &
Hartemink, A. J. (2005). Sparse multinomial logistic
regression: Fast algorithms and generalization bounds.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 27(6), 957–968.
Li, J., Bioucas-Dias, J. M., & Plaza, A. (2010).
Semisupervised hyperspectral image segmentation
using multinomial logistic regression with active
learning. IEEE Transactions on Geoscience and
Remote Sensing, 48(11), 4085–4098.
Omrani, H. (2015). Predicting travel mode of individuals
by machine learning. Transportation Research Procedia,
10, 840–849.
Wang, F., & Ross, C. L. (2018). Machine learning travel
mode choices: Comparing the performance of an
extreme gradient boosting model with a multinomial
logit model. Transportation Research Record, 2672(47),
35–45.
Wong, M., & Farooq, B. (2021). ResLogit: A residual
neural network logit model for data-driven choice
modelling. Transportation Research Part C: Emerging
Technologies, 126, 103050.
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
526
