
A Review of Methods for Applying Object Detection to Intelligent
Driving
Yilin Mei
a
Computer Science and Technology (Big Data Direction), China University of Geosciences (Wuhan), Wuhan, Hubei, China
Keywords: Target Detection, Faster R-CNN, YOLO, Transformer.
Abstract: Nowadays, intelligent driving attracts much attention as an emerging industry due to its convenience and the
novel feeling it brings to people. However, there are also newspapers reporting that intelligent driving often
results in loss of control and causes traffic accidents, which raises public concerns about the safety of this
cutting-edge technology. In that case, this article aims to explain the causes of this phenomenon by deeply
exploring the very important object detection technology in intelligent driving. Hence, through analyzing the
development history, this article is able to illustrate the different solutions of target detection from two-stage
target detection (represented by Faster R-CNN), Single-stage target detection (represented by YOLO), to self-
attention mechanisms in Transformer and some other methods. Besides, it can also interpret the technical
principles, advantages and difficulties faced by these methods. Through comparison and analysis, this article
can help readers understand how target detection influences the environmental perception and safety of
intelligent driving vehicles, thereby providing references for subsequent research, algorithm optimization, and
industrial applications in this field.
1 INTRODUCTION
In recent years, with the rapid development of
artificial intelligence and computer vision
technology, intelligent driving has gradually moved
towards reality and has become a significant
development direction of future transportation. In an
automatic driving system, environmental perception
capability is the key technique to ensure the safe and
efficient operation of vehicles. Consequently, target
detection takes the responsibility for recognizing and
positioning the different targets, such as pedestrians,
vehicles, traffic signs and surrounding obstacles, as
the key link of the perception system.
Target detection algorithms have seen a
significant improvement in terms of detection
accuracy, speed and deployment flexibility from
initial convolutional neural network (CNN) to two-
stage target detection and single-stage target
detection. However, since the application scenarios of
automatic driving are being more and more
complicated, relying solely on traditional network
structures is no longer sufficient to meet the
robustness and real-time requirements for target
a
https://orcid.org/0009-0009-5397-0899
detection in all-weather and all-scenario
environments. In that case, emerging methods such as
the Transformer-based self-attention mechanism,
BEV (Bird's Eye View) perspective, lightweight
network structure, and multi-sensor fusion have
emerged continuously, further promoting the rapid
evolution of intelligent driving perception technology
in recent years. Even so, there are still many
challenges in intelligent driving target detection. The
challenges include detection robustness under
extreme weather conditions, multi-target tracking in
dynamic occlusion environments, real-time
processing on low-power hardware platforms, and
reliance on large-scale and diverse labeled data etc.
To solve these problems, academia continuously
searches for new detection architectures and
optimization strategies. They hope to make a balance
between detection precision and calculation
efficiency.
Through a systematic review of intelligent driving
target detection technology, this article helps
completely understand the development trajectory
and the latest progress of object detection technology,
analyze their advantages and limitations and looks
490
Mei, Y.
A Review of Methods for Applying Object Detection to Intelligent Dr iving.
DOI: 10.5220/0014361700004718
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2025), pages 490-495
ISBN: 978-989-758-792-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
forward to possible research directions and
breakthroughs in the future.
2 TARGET DETECTION
2.1 Intelligent Driving Target
Detection Based on Two-Stage
Method
The two-stage method of target detection evolved
from the original convolutional neural network
(CNN) (Girshick et al., 2014). The original CNN
mainly aims to recognize the target objects,
determining which category the objects in the picture
belong to. However, target detection requires some
other demands, such as orientation and refining the
bounding boxes rather than classification. They need
to predict the location of the target in those
pictures(usually represented by bounding boxes),
which naturally necessitates a higher level of
algorithms and calculations. In that case, the
traditional CNN is very hard to support the new
requirements.
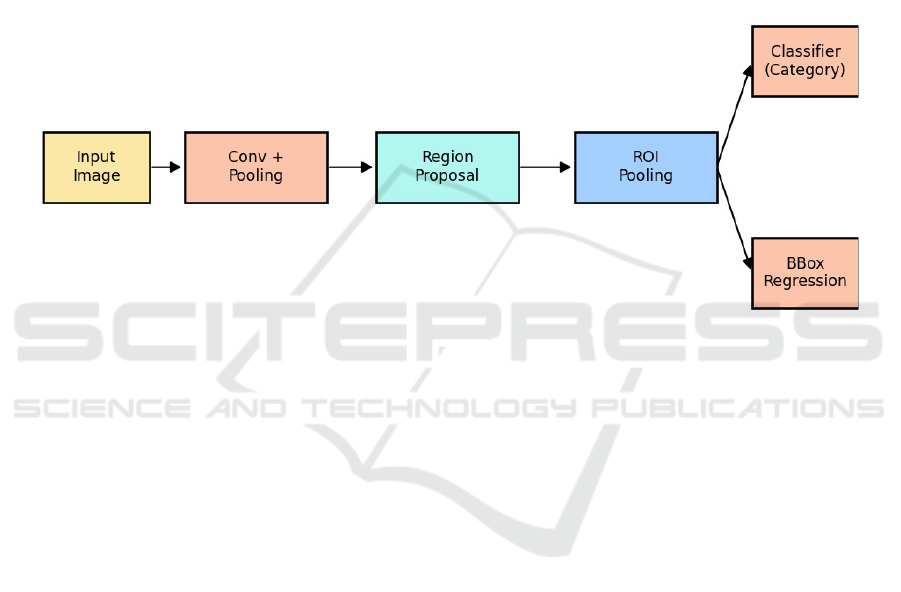
Figure 1: Flowchart of the two-stage object detection method (Picture credit: Original).
Under that circumstance, two-stage object
detection emerged (Girshick et al., 2014). As shown
in Figure 1, this method first takes an input image and
passes it through several layers of convolution and
pooling to extract feature maps. Then, it generates a
sequence of region proposals, which probably contain
those potential targets. These candidate regions are
further processed through ROI pooling to align their
features. Finally, the network branches out to classify
each region into specific categories and regress the
precise location of the bounding boxes. Compared to
traditional algorithms, two-stage object detection
achieves significant improvements in accuracy and
loss rate, and it is widely applied in scenarios that
demand high precision, such as intelligent driving
(Ren et al., 2016).
Take an example of the Faster R-CNN algorithm,
which was first applied in the intelligent driving field
(Ren et al., 2016), it needs to detect if there are several
different types of targets in one transportation photo,
such as pedestrians, traffic signs, signal lights, road
structures and so on. These functions allow the
method are able to assist intelligent driving systems
in choosing the correct roads or directions. To be
specific, Faster R-CNN is very similar to traditional
CNN in its first stage, using some networks such as
ResNet to extract features from the input images; then
using Regional Proposal Network (RPN) to slide the
window on the feature images, predicting if there is a
target in the predictive recognition frames. Finally,
output a series of candidate locations.
When it comes to the next stage, the network
needs to orient the target location accurately and
extract the features in candidate regions. To begin
with, Faster R-CNN would make use of Rol Align
technique to extract the regional features of fixed
dimensions and then classify them into different
categories, such as background, pedestrians and cars
with fully connected layers (Ren et al., 2016).
Meanwhile, the regression edge frames lead the
location more accurately and make the frame
background less redundant. Ultimately, the algorithm
uses Non-maximum Suppression (NMS) to remove
redundant predictions and output the detection
outcomes.
By using this method, the two-stage target
detection achieves great improvement compared to
the past (Ren et al., 2016). Nevertheless, there also
remain some problems. For instance, the detection
speed of Faster R-CNN is very slow, requiring much
A Review of Methods for Applying Object Detection to Intelligent Driving
491

time to do analytical reasoning, which does not satisfy
the demand of high immediacy for today’s automatic
driving. Besides, the model is too complex and needs
high-level computer hardware configuration. Hence,
because of its property of high precision and low
immediacy, the two-stage target detection is more
likely to be used in scenarios for offline high-
precision map production and algorithm verification
rather than modern real-time object detection, which
often prefers single-stage detectors such as SSD (Liu
et al., 2016).
2.2 Intelligent Driving Target
Detection Based on YOLO
With the development of time, YOLO was born as a
representative of single-stage object detection
(Redmon et al., 2016). Different from the two-stage
method, which first generates the candidate regions
and then conducts classification and regression,
YOLO divides the graph into a fixed number of grids.
Each grid can directly predict the location of edge
frames, their size and class probability. As a
consequence, YOLO is able to complete the whole
detection mission in a single stage (Redmon et al.,
2016). The true end-to-end detection process has been
realized. This type of YOLO structure can output the
targets’ location and classification at the same time
through a single neural network. It allows the model
structure more simpler and effective. Therefore, it is
significantly suitable for intelligent driving scenarios
with extremely high requirements of detection
velocity.
The key principle of YOLO is to partition the
input image into an S*S grid, and each grid is
responsible for detecting and predicting any possible
target in its certain regions (Redmon et al., 2016). It
includes multiple bounding frames(Usually, B
bounding boxes are predicted), each bounding
frame’s confidence and class probability. The
confidence contains not only the probability of the
existence of the target, but also the degree of overlap
(IoU) between the bounding frame and the real target.
Finally, the model will output all of the prediction
outcomes and remove the redundant frames through
the non-maximum suppression (NMS) method. It
only retains some detection results with high
confidence. This type of “regressive” thinking avoids
many generations' steps in the lengthy candidate
region in the two-stage method. Consequently, the
inference speed can be greatly improved (Redmon et
al., 2016).
The initial YOLO version(YOLOv1) was
approximately 300 times faster than the two-stage
method in terms of speed (Redmon et al., 2016).
However, its accuracy rate is 6.6 times lower than
Faster R-CNN due to its limited faculties for
detecting small targets. To solve these problems, the
YOLO series gradually adds some new methods to
make up for these deficiencies in its subsequent
versions (Bochkovskiy et al., 2020).
Firstly, taking advantage of some good ideas of
Faster R-CNN, the YOLO algorithm also introduces
multi-scale anchor boxes to improve the detection
ability of small targets and dense targets;
Second, YOLO uses Feature Pyramid
Network(FPN) to achieve Multi-scale feature
extraction and fusion, which supports detecting big
targets and small targets from different resolution
layers (Bochkovskiy et al., 2020).
Additionally, by using the advanced data
augmentation methods such as Depth-separable
convolution, Pruning, quantification and Mosaic,
YOLO gets more lightweight and regularization. It
obviously improves the detection effect while
reducing the computational overhead (Bochkovskiy
et al., 2020). Besides, YOLO improves its backbone
networks, such as Darknet-53 and CSPDarknet and
manages to enhance the feature extraction capability
(Bochkovskiy et al., 2020; Wang et al., 2023).
So when it comes to the beginning of 2025,
YOLO has developed the newest version to
YOLOv11. It not only gets similar or better precision
in the public datasets such as COCO and KITTI
compared to the two-stage method, but also supports
real-time operation at extremely high frame rates in
embedded or vehicle-mounted environments (Wang
et al., 2023). It allows YOLO to be one of the most
representative detection algorithms in real-time
intelligent driving scenarios.
Take a concrete example of intelligent driving,
YOLO is capable of immediately coping with the
video stream collected by the vehicle-mounted
cameras and recognizing the key targets such as
pedestrians, cars and transportation signs with high
efficiency (Redmon et al., 2016; Wang et al., 2023).
For example, YOLOv4 is improved with a
lightweight backbone and feature pyramid to detect
vehicles and pedestrians more robustly in urban
scenes, achieving a 3.5% mAP gain on KITTI while
keeping real-time speed (Ma et al., 2021).
These positive reinforcements provide reliable
visual input for subsequent path planning or collision
warning. In this case, the single-stage end-to-end
structure reduces the latency effectively and enhances
the safety and stability in a dynamic road
environment for cars.
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
492

Meanwhile, nowadays academia is still trying to
optimize the YOLO series to further enhance its
robustness and generalization ability in extreme
environments such as complex weather, night, rain
and snow. With the introduction of new technologies
such as Transformer, attention mechanisms, and
unsupervised learning, YOLO is expected to play a
greater pivotal role in intelligent driving target
detection and support the construction of higher-level
autonomous driving perception systems (Wang et al.,
2023).
2.3 Intelligent Driving Target
Detection Based on Transformer
The application of Transformer originated from the
field of natural language processing, first proposed by
Google (Vaswani et al., 2017). Its main self-attention
mechanism was used for machine translation at the
beginning. However, academia then discovered that it
is also very excellent in many other fields with high
accuracy and speed. And its performance is also far
ahead of ordinary CNN and RNN in various rankings.
Computer vision is also one of its applications
(Dosovitskiy et al., 2020).
Different from traditional neural networks, the
particular self-attention mechanism of Transformer
allows it to handle input sequences of any length
(Vaswani et al., 2017). This competence helps
Transformer completely solve the problem of long-
range dependence in RNN and has a powerful parallel
computing performance. In target detection, using
self-attention helps capture global information in the
images and analyze the relation between different
location features, so that the systems can understand
the spatial interaction relationship between objects.
And this is very important, especially in complicated
situations. For example, an intelligent driving system
usually needs to analyze the dynamic relationships
among different vehicles and pedestrians at the same
time on city roads (Dosovitskiy et al., 2020). For
instance, TransTrack is proposed, which integrates a
Transformer with a tracking-by-detection framework
to jointly detect and track multiple objects in driving
scenes, achieving higher accuracy and robust
trajectory prediction compared to CNN-based
trackers (Sun et al., 2020).
The Transformer model is capable of
transforming feature map information into higher-
level semantic information. Through capturing the
relative location relationships between important
targets, self-attention can analyze their behavioral
trends. In that case, the Transformer can recognize the
relationship between the distance and speed of
vehicles inside and outside the lane, which is helpful
for predicting other cars’ movement tracks
(Dosovitskiy et al., 2020).
In addition, combining with other advanced
techniques would also grant the Transformer greater
efficacy. For instance, when combined with BEV
(Birds-eye View), it brings about a global
environmental perception capability, which can
effectively reduce blind spots around the vehicles (Li
et al., 2024). In high-speed roads or complex
intersections, the cars need to recognize the lanes
precisely in order to keep driving within the lane.
Under those circumstances, the traditional camera
recognition is easy to be influenced by light and
viewing angle. On the contrary, the BEV +
Transformer utilizes an all-around birds-eye view to
stably identify lane lines even under harsh conditions,
making it safer for vehicles to change lanes or make
sharp turns (Li et al., 2024).
2.4 Other Methods in Intelligent
Driving
In addition to the mainstream two-stage methods, the
single-stage YOLO series, and the emerging
detection methods based on Transformer, there are
also some highly adaptable detection approaches.
Among these, the lightweight detection network is
one of the research hot spots in recent years. Since the
computing power in vehicle-mounting scenarios is
limited, some researchers introduced techniques such
as network pruning, parameter sharing and efficient
operators in the model structure design (Howard et
al., 2017). All of these are aiming to minimize the
model volume as much as possible while ensuring the
detection ability, making it more convenient to run in
real time in embedded devices. Some representative
methods, such as MobileNet-SSD and Tiny-YOLO,
implement these methods very well (Howard et al.,
2017).
Besides, multi-task learning and end-to-end
integrated perception have also become one of the
important development directions of intelligent
driving target detection. These improvements not
only output classification and location, but also
accomplish other missions such as semantic
segmentation, instance segmentation, and object
tracking, demonstrating higher insights into
complicated road scenarios. For example, Mask R-
CNN can not only detect the target, but also output
the accurate segmentation results of the target area
(He et al., 2017); CenterTrack adds a real-time multi-
target tracking function on the basis of detection,
A Review of Methods for Applying Object Detection to Intelligent Driving
493
which greatly improves the environmental perception
ability of vehicles in dynamic scenes (He et al., 2017).
These diverse methods continuously enrich the
technical routes of intelligent driving target detection
and complement the mainstream methods, jointly
promoting the practical and intelligent development
of autonomous driving perception systems.
3 DATASETS
In order to support the research and verification of
target detection in intelligent driving, abundant high-
quality labeled datasets have been made public by
academia. These datasets often contain different types
of transportation scenarios, weather, luminosity and
information collected by sensors. And the datasets are
widely used in detecting multiple types of targets
such as vehicles, pedestrians, non-motorized
vehicles, and traffic signs.
Table 1 summarizes the most representative and
widely used public datasets in the field of intelligent
driving at present.
4 CURRENT LIMITATIONS AND
FUTURE PROSPECTS
Although the target detection technique has made
great progress in the intelligent driving field, it still
has some limitations. So the academia is going to do
some deep research in several aspects as follows.
At first, the robustness of models in extreme
weather environments is still not sufficient. For
instance, the visual detection is more likely to get
missed detection and false detection when in harsh
weather such as rain, snow and smog, which
negatively influences the safety of the intelligent
driving system. In the future, it might integrate more
high-quality sensors to achieve multi-modal fusion
perception to enhance the robustness and stability of
the detection system in a particular environment.
In addition, the capabilities of multi-target
detection and occlusion processing in complex
dynamic scenes still need to be improved, especially
in dense crowds and mixed traffic of non-motorized
vehicles situations. Hence, it is significant to improve
the adaptive ability to recognize unknown targets and
support incremental learning of vehicles during
operation to continuously enhance detection
capabilities.
Moreover, the construction and update of labeled
datasets are very expensive. Existing datasets still
have disadvantages in scene diversity and long-tail
distribution, making it difficult to cover all actual
road conditions. Therefore, unsupervised learning,
which is suitable for unlabeled or weakly supervised
learning with few labels, can be introduced to
enhance the generalization ability of the model and
reduce its reliance on large-scale manually labeled
data.
Table 1: Summary of available datasets in the field of intelligent driving.
Dataset Name Year
Release
d
Main Sensors Number of
Samples
Main
Scenario
Key Features
KITTI 2012 Monocular &
Stereo Cameras,
LiDAR
15K+
frames
Urban Roads Classic benchmark; includes
detection, tracking, and 3D tasks
Cityscapes 2016 Monocular Camera 5K+ images Urban
Streets
High-resolution pixel-level
annotation, detection and
segmentation
BDD100K 2018 Monocular Camera 100K+
frames
Urban &
Hi
g
hwa
y
s
Diverse weather, day/night;
detection and trackin
g
labels
nuScenes 2019 Cameras, LiDAR,
IMU, GPS
1.4M
frames
Urban Roads Multi-sensor synchronized
labels; supports 3D detection
and trackin
g
Waymo Open
Dataset
2019 Cameras, LiDAR 12M+
frames
Urban Roads Large-scale dataset for
autonomous driving; rich sensor
annotations
ApolloScape 2018 Monocular Camera,
LiDAR
140K+
frames
Urban &
Suburban
Opened by Baidu; complex
scenarios with lane markin
g
s
Argoverse 2019 Cameras, LiDAR,
HD Maps
290K+
frames
Urban Roads Includes high-definition map
context; suitable for trajectory
p
rediction
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
494

5 CONCLUSIONS
As a crucial part of environmental perception, target
detection directly determines the safety and reliability
of a vehicle's understanding of its surrounding
environment and decision-making in intelligent
driving systems.
This article reviews the development history and
principles of intelligent driving target detection
algorithms from two-stage to single-stage target
detection and then to self-attention mechanism
detection method based on Transformer, with some
other methods for lightweight emerging in recent
years. It also compares and analyzes the core ideas,
performance and applicable scenarios of different
techniques.
In summary, with the continuous improvement of
algorithm theory and hardware computing power,
object detection technology has made remarkable
progress in intelligent driving. But it still needs
deeper research for greater precision, robustness and
immediacy to satisfy the greater requirement in
complex scenarios in the future. It is evident that
some excellent methods, such as Multimodal
perception, lightweight network structure, and few-
shot learning, are changing this field. Maybe one day
they can make a great surprise for all.
REFERENCES
Bochkovskiy, A., Wang, C. Y., & Liao, H. Y. M. (2020).
Yolov4: Optimal speed and accuracy of object
detection. arXiv preprint arXiv:2004.10934.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., ... & Houlsby, N. (2020).
An image is worth 16x16 words: Transformers for
image recognition at scale. arXiv preprint
arXiv:2010.11929.
Girshick, R., Donahue, J., Darrell, T., & Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. In Proceedings of the IEEE
conference on computer vision and pattern recognition
(pp. 580–587).
He, K., Gkioxari, G., Dollár, P., & Girshick, R. (2017).
Mask R-CNN. In Proceedings of the IEEE international
conference on computer vision (pp. 2961–2969).
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D., Wang,
W., Weyand, T., ... & Adam, H. (2017). Mobilenets:
Efficient convolutional neural networks for mobile
vision applications. arXiv preprint arXiv:1704.04861.
Li, Z., Wang, W., Li, H., Xie, E., Sima, C., Lu, T., ... & Dai,
J. (2024). Bevformer: Learning bird's-eye-view
representation from lidar-camera via spatiotemporal
transformers. IEEE Transactions on Pattern Analysis
and Machine Intelligence.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C. Y., & Berg, A. C. (2016). SSD: Single shot
multibox detector. In Computer Vision–ECCV 2016
(pp. 21–37). Springer International Publishing.
Ma, L., Chen, Y., & Zhang, J. (2021, May). Vehicle and
pedestrian detection based on improved YOLOv4-tiny
model. In Journal of Physics: Conference Series (Vol.
1920, No. 1, p. 012034). IOP Publishing.
Redmon, J., Divvala, S., Girshick, R., & Farhadi, A. (2016).
You only look once: Unified, real-time object detection.
In Proceedings of the IEEE conference on computer
vision and pattern recognition (pp. 779–788).
Ren, S., He, K., Girshick, R., & Sun, J. (2016). Faster R-
CNN: Towards real-time object detection with region
proposal networks. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 39(6), 1137–1149.
Sun, P., Cao, J., Jiang, Y., Zhang, R., Xie, E., Yuan, Z., ...
& Luo, P. (2020). Transtrack: Multiple object tracking
with transformer. arXiv preprint arXiv:2012.15460.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., ... & Polosukhin, I. (2017). Attention
is all you need. Advances in Neural Information
Processing Systems, 30.
Wang, C. Y., Bochkovskiy, A., & Liao, H. Y. M. (2023).
YOLOv7: Trainable bag-of-freebies sets new state-of-
the-art for real-time object detectors. In Proceedings of
the IEEE/CVF conference on computer vision and
pattern recognition (pp. 7464–7475).
A Review of Methods for Applying Object Detection to Intelligent Driving
495
