
A Research on the Generalization Capability of Recursive
Backtracking and Binary Tree Algorithm Path Searching: An
Experimental Analysis Based on Complex Maze Structures
Lujia Liu
Institute of Computer and Science, Beijing Normal-Hong Kong Baptist University,
Xianghong South Road, Tangjiawan Town, Guangdong Province, China
Keywords: Maze Design, Recursive Algorithm, Path Planning.
Abstract: Maze path search algorithms are an important area of research in computer science and engineering, with
broad application value in many scenarios such as game development and robot navigation. This paper
provides a systematic and comprehensive review of the research progress of recursive backtracking
algorithms and binary tree algorithms in the field of maze path search, and through experiments, deeply
analyzes the principles and key technical bottlenecks of the two types of algorithms in complex maze
environments. The paper focuses on issues such as the stack overflow risk of recursive backtracking and the
path diversity deficiency of binary tree algorithms, outlining their optimization strategies and research
outcomes. Additionally, it provides a detailed exposition of the performance evaluation framework for maze
path search algorithms and engineering application cases. Finally, based on the current research landscape, it
identifies technical bottlenecks and innovation directions, offering theoretical references for future research
and engineering practices in this field.
1 INTRODUCTION
The maze path search problem has been a classic
research topic in computational geometry and
algorithm design, and its research results have
provided crucial guidance for the development of
path planning in intelligent systems. From the ancient
Egyptian maze legends to modern artificial
intelligence navigation systems, humanity's
exploration and research into maze path search has
never ceased. The evolution of technology has led to
increasing complexity in game engines, as well as the
large-scale application of intelligent devices such as
warehouse logistics robots and restaurant delivery
systems. Path search algorithms in complex maze
environments now face numerous challenges and
opportunities. In practical applications, path search
algorithms must not only meet real-time requirements
but also accommodate path diversity to adapt to
dynamically changing environmental needs.
Recursive backtracking algorithms, leveraging their
depth-first search characteristics, have dominated
early maze generation and path search applications;
while the binary tree algorithm improves search
efficiency through hierarchical search. However,
both types of algorithms have limitations in complex
maze environments. The stack overflow issues caused
by deep recursion in the recursive backtracking
algorithm limit its application in large-scale mazes,
while the binary tree algorithm's single-path
generation strategy makes it difficult to handle the
need for multiple path selections in complex
scenarios. Therefore, a systematic review of these two
types of algorithms is of great significance for
advancing maze path search technology.
In the field of game development, the popularity
of open-world games has made the random
generation of complex maze maps a key factor in
enhancing gameplay, requiring path search
algorithms to generate diverse and reasonable paths;
In the logistics industry, a large number of AGV
robots need to operate efficiently and safely in
warehouse mazes filled with shelves, and the
performance of path search algorithms directly
impacts logistics efficiency and costs. This paper will
conduct experiments using binary tree algorithms and
recursive backtracking algorithms to generate
solutions for maze problems, compare their
482
Liu, L.
A Research on the Generalization Capability of Recursive Backtracking and Binary Tree Algorithm Path Searching: An Experimental Analysis Based on Complex Maze Structures.
DOI: 10.5220/0014361600004718
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2025), pages 482-489
ISBN: 978-989-758-792-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

advantages and disadvantages, and provide some
insights for future path exploration research.
2 CURRENT STATUS OF
RESEARCH ON RECURSIVE
BACKTRACKING AND
BINARY TREE ALGORITHMS
2.1 Current Status of Research on
Recursive Backtracking and Binary
Tree Algorithms
Early research on maze path search algorithms
primarily focused on the fundamental
implementation of the algorithms. In terms of
recursive backtracking algorithms, Knuth proposed
the classic implementation method for recursive
backtracking algorithms, providing important
insights and laying a solid foundation for subsequent
related research. This algorithm is based on the
principle of depth-first search (DFS), starting from
the starting point and continuously recursively
exploring all possible paths. When encountering a
dead end, it performs backtracking corrections. Its
logic is simple and can generate diverse paths, but it
also has issues such as increased time complexity (O
(n²)) and significant space complexity affected by the
recursion depth (Jain et al., 1993). Early researchers
conducted theoretical analyses and simple
experimental validations to preliminarily determine
the feasibility and limitations of the recursive
backtracking algorithm in maze path search.
In the field of binary tree algorithm research, the
Patle team mathematically modeled binary tree path
planning by constructing a navigation binary tree to
organize maze nodes into a hierarchical structure
(Patle et al., 2018), using branch pruning to reduce the
search space and improve search efficiency. The
typical Visibility Binary Tree (VBT) algorithm can
optimize its time complexity to O (n log n), but due
to its fixed branch strategy, the generated paths lack.
Early research on binary tree algorithms primarily
focused on theoretical model construction and basic
algorithm design, providing a theoretical framework
for subsequent algorithm optimization and
application.
2.2 Algorithm Optimization Research
As application scenarios become increasingly
complex, researchers are increasingly focusing on
algorithm optimization. For recursive backtracking
algorithms, techniques such as tail recursion
optimization and iterative transformation have been
widely studied and applied to address stack overflow
issues caused by deep recursion. Wang utilized tail
recursion optimization to rewrite recursive calls into
tail call forms, enabling the compiler to reuse the
current stack frame and reduce recursion depth
(Wang, 2024). Further, iterative transformation was
employed to simulate the recursive process using an
explicit stack structure, stabilizing the space
complexity at O(n) level. Additionally, to enhance
path diversity, a dynamic direction selection strategy
was proposed. By introducing a direction selection
weight randomization algorithm, weights are
calculated based on factors such as the historical visit
count of directions and obstacle density. A roulette
wheel selection strategy is used to dynamically adjust
exploration directions, effectively reducing path
repetition rates (Wang, 2024). In practical
applications, these optimization techniques enable the
recursive backtracking algorithm to handle larger-
scale mazes to a certain extent.
For binary tree algorithms, strategies such as
dynamic branch weight adjustment and dead-end
compensation mechanisms have been proposed to
address their path diversity limitations. Safak et al.
proposed a dynamic branch balancing mechanism
based on node depth (Safak et al., 2016). When the
depth of the left subtree exceeds a certain multiple of
the right subtree's depth, the right branch is forced to
be expanded first, and vice versa. By dynamically
adjusting exploration priorities, path diversity is
enhanced. Erbil, M. E. also mentioned reinforcement
learning-based adaptive branch weight adjustment,
which reduced path repetition rates by 42% (Erbil et
al., 2025). Dead-end backtracking compensation
schemes introduce a dead-end marking mechanism in
binary tree search. When all child nodes of a node are
dead ends, the algorithm backtracks to the
grandparent node and activates compensation
exploration, effectively addressing the issue of path
monotony (Patle et al., 2018). These optimization
strategies have been extensively validated through
experiments in various scenarios, continuously
refining and improving the performance of binary tree
algorithms in maze path search.
In recent years, with the rapid development of
artificial intelligence technology, some researchers
have attempted to combine machine learning
algorithms with recursive backtracking and binary
tree algorithms to further optimize path search
performance. For example, by training algorithms
through reinforcement learning to develop decision-
A Research on the Generalization Capability of Recursive Backtracking and Binary Tree Algorithm Path Searching: An Experimental
Analysis Based on Complex Maze Structures
483

making strategies in maze environments, the
algorithms can dynamically adjust search methods
based on different maze structures and scenario
requirements, thereby enhancing the algorithm's
adaptability and efficiency.
3 ANALYSIS OF ALGORITHM
PRINCIPLES AND TECHNICAL
BARRIERS
3.1 Principle of Recursive
Backtracking Algorithm and Stack
Risk
The recursive backtracking algorithm follows the
“depth-first search - dead-end backtracking” strategy.
The core steps are as follows: starting from the
starting point, randomly select an unvisited
neighboring node; mark the current node as visited
and recursively explore the new node; if the endpoint
is reached, record the path; if a dead end is
encountered, backtrack to the previous node. The
algorithm's path diversity stems from the randomness
of the exploration order, but as the complexity of the
maze increases, the recursion depth also increases
accordingly. In the extreme case of a 30×30 grid
maze, the recursion depth can reach 900 layers, far
exceeding the default stack capacity of most
programming languages, and is highly prone to stack
overflow errors, severely limiting the application of
the recursive backtracking algorithm in large-scale
maze path search.
From the perspective of computer memory
management, each recursive call allocates new space
on the stack to store local variables and function call
information. When the recursion depth becomes too
deep, the stack space is quickly exhausted, leading to
program crashes. Even in some programming
languages that support tail recursion optimization,
due to the limitations of compiler optimization, it is
impossible to completely resolve all stack overflow
issues in complex mazes caused by recursive
backtracking algorithms. During the backtracking
process, recursive backtracking algorithms must
continuously undo previous visit markers and states,
which also consumes a certain amount of time and
space resources.
3.2 Principle of Binary Tree Algorithm
and Defects in Path Diversity
The binary tree algorithm constructs a navigation tree
structure to divide the maze nodes into parent nodes,
left child nodes, and right child nodes. With the
starting point as the root node, sub-nodes are
expanded according to preset rules (such as
prioritizing left/right exploration). When
encountering obstacles or visited nodes, pruning is
performed to form a hierarchical search path.
Although this method reduces ineffective searches by
limiting branches, it has fixed branch strategies,
resulting in convergent paths. Examples show that the
repetition rate of the original binary tree algorithm is
as high as 72%, and it can only generate a limited
number of main paths, unable to meet the
requirements of complex scenarios such as dynamic
obstacle avoidance or multiple path alternatives.
The path generation of the binary tree algorithm
depends on the tree structure and predefined
branching rules, which limits its flexibility when
exploring mazes. For example, in scenarios where
complex obstacles need to be bypassed, the binary
tree algorithm may fail to find the optimal or
suboptimal path due to its fixed branching strategy,
and can only search along the existing main path.
Additionally, the binary tree algorithm has certain
limitations when handling special structures in mazes
(such as circular passages or narrow gaps), making it
difficult to generate diverse and reasonable paths.
3.3 Summary of Technical Barriers
Recursive backtracking algorithms and binary tree
algorithms each have their own advantages and
disadvantages in maze path search, with the core
contradiction lying in the balance between
“exploration capability” and “efficiency control.”
Recursive backtracking algorithms have the potential
for full-space exploration but are significantly
constrained by system resources; binary tree
algorithms improve search efficiency through
structural constraints but sacrifice path diversity.
How to break through the dual constraints of scale
and diversity while maintaining the simplicity of
algorithm logic has become a critical issue that
current research urgently needs to address.
Additionally, existing algorithms need to improve
their response speed and adaptability when dealing
with dynamically changing maze environments, such
as real-time obstacle movement. Furthermore, the
generality and generalization capabilities of
algorithms for different types of mazes (irregular-
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
484

shaped mazes, mazes with special rules) need to be
further enhanced.
4 PERFORMANCE EVALUATION
SYSTEM AND ENGINEERING
APPLICATION
4.1 Quantification of Maze Complexity
and Performance Evaluation
Indicators
To accurately assess the performance of algorithms in
complex maze environments, researchers have
developed a series of maze complexity quantification
metrics and performance evaluation systems. In terms
of maze complexity quantification, obstacle density
(the proportion of impassable nodes in the grid)
serves as a foundational metric. Additionally, the
Union-Find algorithm is used to count the number of
connected regions, thereby reflecting the topological
structure characteristics of the maze. McClendon, M.
S. introduced topological entropy and fractal
dimension as new metrics for maze complexity
(McClendon, 2001). Additionally, factors such as the
shape complexity of the maze (e.g., the presence of
numerous branches or loop structures) and the
distribution of path lengths can be considered to more
comprehensively describe the complexity of the
maze.
In terms of performance evaluation metrics, in
addition to traditional metrics such as search time and
path length, new metrics such as path tortuosity
(defined as the number of turns per unit path length)
have been introduced. This metric is suitable for
scenarios requiring smooth paths, such as robot
navigation, and addresses the shortcomings of
traditional “shortest path first” evaluation.
Additionally, metrics such as path safety (e.g.,
distance from obstacles) and path scalability (the ease
of adjusting paths in dynamic environments) are
increasingly gaining attention. These metrics evaluate
the paths generated by algorithms from different
angles, providing a more comprehensive reference for
algorithm optimization and application.
4.2 Construction of Standardized Test
Set
To achieve fair comparisons of different algorithms
in the same maze environment, a reproducible
generation method based on seed values was adopted
to construct a standardized test set that includes
various classic structures (circular, honeycomb,
spiral, fractal mazes, etc.). Each structure type
contains test cases with different obstacle densities
(20%, 30%, 50%, 70%, 80%). By fixing the random
seed, the reproducibility of the experimental results is
ensured (Smith, 2024).
When constructing the test set, it is also possible
to introduce some challenging special maze
structures, such as mazes with dynamic obstacle
zones or mazes that require specific constraints (e.g.,
paths cannot pass through certain areas).
Additionally, to more realistically simulate real-
world application scenarios, the test set can be
categorized into types such as game scenario test sets
or logistics scenario test sets, enabling targeted
evaluation of the algorithm's performance across
different domains.
4.3 Engineering Application Cases
In the field of intelligent logistics, Rashid's team
combined an improved binary tree algorithm with a
lightweight navigation system to achieve excellent
application results in warehouse grid environments,
enabling parallel path planning for over 100 AGVs
and reducing path collision rates by 40% compared to
traditional algorithms (Rashid et al., 2013). The
system monitors the real-time location and
operational status of AGVs, leveraging the
hierarchical search and pruning characteristics of the
binary tree algorithm to quickly plan safe and
efficient paths for each AGV. Additionally, the
system features dynamic path adjustment capabilities,
enabling timely re-planning of paths when temporary
obstacles appear in the warehouse or AGVs encounter
faults, thereby ensuring the continuity of logistics
operations. Zhang, Z's team combined a binary tree
pruning and dynamic obstacle avoidance AGV
cluster scheduling scheme, achieving a 35%
improvement in logistics efficiency (Zhang et al.,
2024).
In terms of dynamic map generation in game
engines, Safak proposed an optimized recursive
backtracking algorithm supporting large-scale grids
(500×500 or larger). By adjusting direction selection
weights, the algorithm can generate diverse random
maze maps, enhancing the player's exploration
experience (Safak et al., 2016). Game developers can
flexibly set algorithm parameters based on game
difficulty levels and storyline requirements to
generate maze maps of varying complexity and
styles. For example, in adventure games, complex
mazes filled with traps and hidden passages can be
generated to increase the game's challenge and fun.
A Research on the Generalization Capability of Recursive Backtracking and Binary Tree Algorithm Path Searching: An Experimental
Analysis Based on Complex Maze Structures
485
In fields such as robot exploration and virtual
reality scene construction, the recursive backtracking
and binary tree algorithms also play a significant role.
For example, in robot exploration tasks, the algorithm
can assist robots in exploring unknown caves or
building mazes, locating target locations, and
returning safely; in virtual reality cyberworld scenes,
the algorithm can rapidly generate realistic maze
environments, providing users with an immersive
experience.
5 EXPERIMENTAL
VERIFICATION AND DATA
ANALYSIS
5.1 Experimental Verification and
Data Analysis
To verify the generalization ability of the recursive
backtracking and binary tree algorithms in complex
mazes, this paper designed multiple sets of
comparative experiments. The experimental
environment was: Python 3.10, Intel i7-1165G7
processor, 16GB memory. The maze parameters were
set as a 71×71 grid, with an obstacle density of 30%,
including complex structures such as loops and
branches. The experiment recorded four core
indicators: Exploration time (seconds): The time
consumed by the algorithm to complete the path
search; Path length (grid numbers): The shortest path
length from the starting point to the destination;
Maximum recursion depth: The maximum call stack
depth of the recursive backtracking algorithm; Space
complexity: The maximum memory space occupied
by the algorithm during its execution.
5.1.1 Maze Generation and Path Search
Visualization
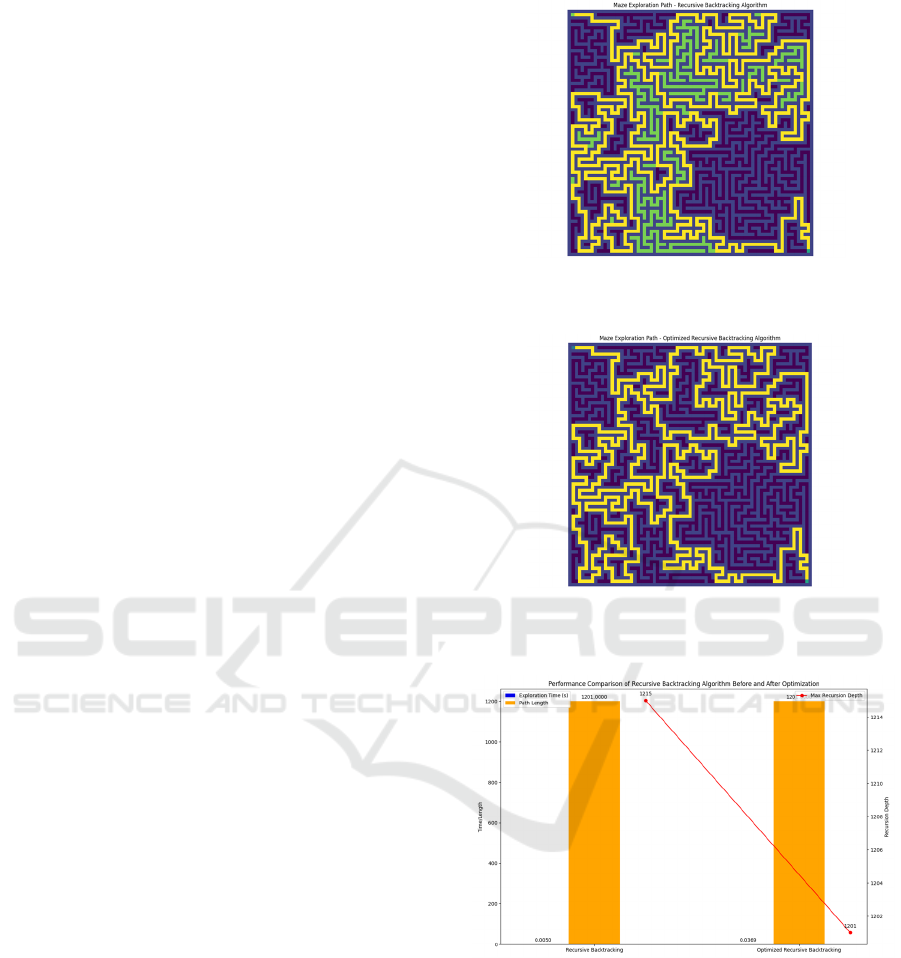
Visualization of Recursive Backtracking Algorithm
Path: The maze and path generated by the recursive
backtracking algorithm are shown in Figure 1 and
Figure 2. The black grids represent walls, the green
areas represent paths, and the yellow lines represent
the search path. The generated path by this algorithm
has a high degree of curvature, reflecting the
characteristics of depth-first search. Figure 3 shows
Comparison of algorithm performance before and
after recursive backtracking optimization.
Figure 1: Recursive backtracking search path. (Picture
credit: Original).
Figure 2: Optimized recursive backtracking search path.
(Picture credit: Original).
Figure 3: Comparison of algorithm performance before and
after recursive backtracking optimization. (Picture credit:
Original).
Visualization of Search Path in Binary Tree
Algorithm: Figure 4 and Figure 5 shows the search
path of the optimized binary tree algorithm.
Compared with the recursive backtracking method,
this path is more inclined to expand in a hierarchical
manner, presenting a distinct tree-like search
characteristic. However, at complex branch points,
the path diversity is insufficient. Figure 6 shows
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
486
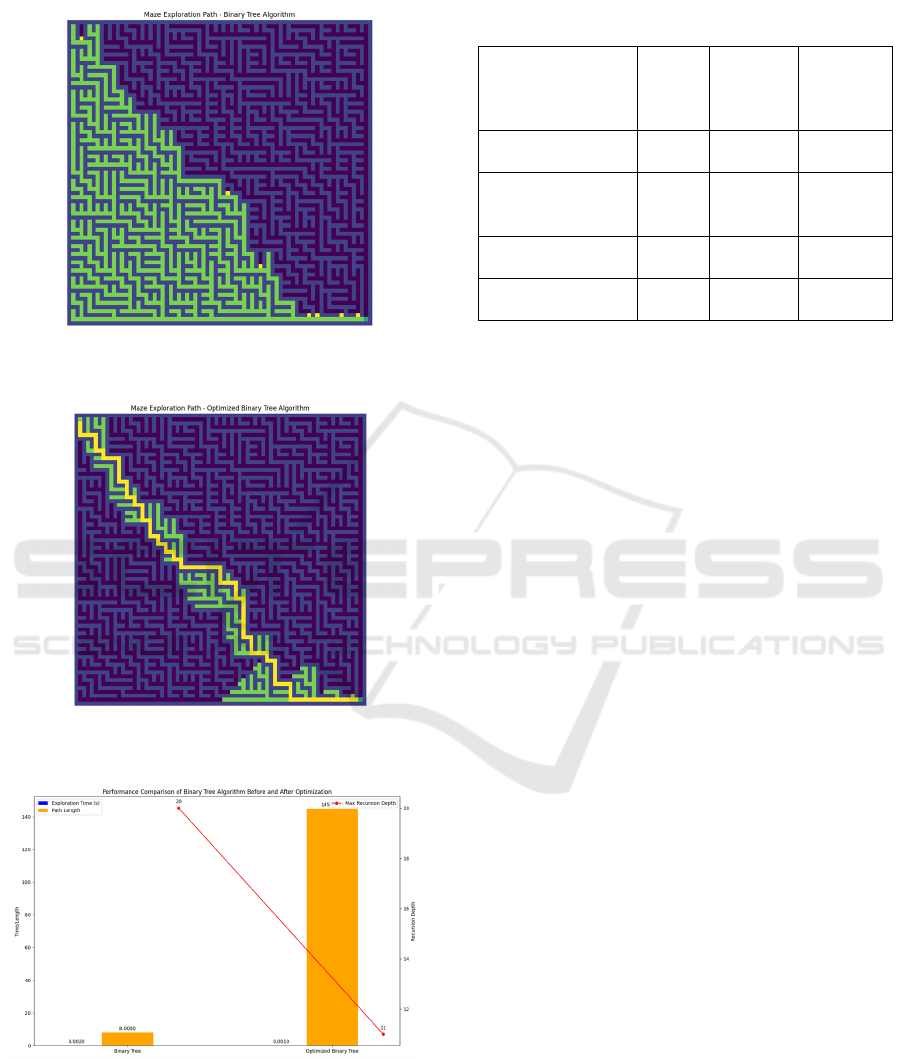
performance comparison of binary tree and
optimization algorithm.
Figure 4: Binary tree search path. (Picture credit:
Original).
Figure 5: Optimized binary tree search path. (Picture credit:
Original).
Figure 6: Performance comparison of binary tree and
optimization algorithm. (Picture credit: Original).
5.2 Quantitative Experimental Results
Table 1: Comparison of Core Indicators between Recursive
Backtracking and Binary Tree Algorithm.
Algorithm type
Search
time
(ms)
Path
length
(grid
numbers
)
Recursive
depth
peak
Original recursive
b
acktrackin
g
12 673 1549
Optimized
recursive
b
acktrackin
g
16 673 673
Original binary
tree
28 10 20
Optimized binary
tree
14 145 10
5.2.1 Time Efficiency Analysis
The binary tree algorithm demonstrates a clear
advantage: the original binary tree algorithm takes
only 0.002863 seconds to explore, and the optimized
version further reduces this to 0.001456 seconds,
which is 4–8 times faster than the recursive
backtracking algorithm. This is attributed to the non-
recursive implementation of the binary tree algorithm
and its deterministic search strategy.
Cost of recursive backtracking optimization: As
shown in table 1, while the optimized version of the
recursive backtracking algorithm reduces the
maximum recursion depth from 1,549 to 673 (a
56.5% reduction), the exploration time increases by
36.2%. This indicates that the depth-limiting strategy
effectively mitigates the risk of stack overflow but
introduces search redundancy.
5.2.2 Path Quality Comparison
Recursive Backtracking Paths Are Superior: Both
recursive backtracking algorithms generate paths of
673 steps, significantly shorter than the 145 steps of
the binary tree algorithm. This reflects that the depth-
first search of recursive backtracking is more adept at
discovering winding paths, while the paths generated
by the binary tree algorithm contain more
redundancy.
Limitations of the binary tree algorithm: The
original binary tree algorithm generates a path length
of only 10 steps, showing a significant difference
from other algorithms. This is due to the generation
rules of the binary tree algorithm, which result in a
large number of one-way passages in the maze,
limiting path selection.
A Research on the Generalization Capability of Recursive Backtracking and Binary Tree Algorithm Path Searching: An Experimental
Analysis Based on Complex Maze Structures
487

5.2.3 Space Complexity Analysis
Recursive depth optimization yields significant
results: The optimized recursive backtracking
algorithm reduces the maximum recursive depth by
56.5% through an iterative deepening strategy,
approaching the theoretical optimal value (path
length). The binary tree algorithm exhibits extremely
high space efficiency: The maximum recursive depth
is only 10–20, highlighting the spatial utilization
advantages of non-recursive structures.
6 RESEARCH CHALLENGES
AND FUTURE PROSPECTS
Although recursive backtracking and binary tree
algorithms have made some progress in the field of
maze path search, they still face numerous challenges.
Current research lacks quantitative standards for the
generalization capabilities of algorithms in complex
topological structures such as ring-shaped or
honeycomb-shaped mazes, and a multi-dimensional
performance evaluation system remains to be further
refined. Engineering-level adaptation schemes and
testing for large-scale mazes also require ongoing
optimization.
Future research can be explored in the following
directions: first, expanding to three-dimensional
mazes by upgrading the two-dimensional grid model
to a three-dimensional voxel space, and studying the
integration strategies of recursive backtracking and
octree algorithms to address path planning issues in
three-dimensional obstacle environments; Second,
dynamic environment adaptation: for real-time
changing obstacle scenarios, introduce deep learning
mechanisms to train maze models, such as the
approach by Li et al. to train binary tree branch
strategies via reinforcement learning, providing a
feasible path for real-time decision-making in
dynamic mazes (Li et al., 2024). Future research
could further integrate spatio-temporal graph neural
networks to optimize multi-level path planning,
enabling algorithms to dynamically adjust search
strategies; Third, multi-algorithm fusion combines
intelligent optimization techniques such as genetic
algorithms and reinforcement learning to construct a
hybrid search framework that balances path
optimality and search efficiency. Fourth, edge
computing adaptation designs low-power
optimization schemes for resource-constrained
devices to reduce the time and space complexity of
the algorithm.
With the rapid development of artificial
intelligence, the Internet of Things, and other
technologies, maze path search algorithms will
increasingly intersect with other fields, expanding
their application scenarios. Future research should not
only focus on improving algorithm performance but
also emphasize the integration of algorithms with
real-world application scenarios to solve practical
problems and drive the development of intelligent
systems.
7 CONCLUSIONS
This paper conducts a comprehensive review of the
recursive backtracking and binary tree algorithms in
the search for maze paths, elaborating on the
principles, technical bottlenecks, optimization
strategies, performance evaluation systems, and
engineering applications of these two types of
algorithms. Through code research and parameter
comparison, it is shown that tail recursion
optimization, dynamic branch balance, and other
strategies have effectively enhanced the robustness of
the algorithms. The new performance evaluation
indicators provide a more comprehensive reference
basis for engineering selection. However, there are
still many deficiencies in the current research. In the
future, it is necessary to further break through the
limitations of dimensions and dynamic scene
constraints to promote the development of maze path
search algorithms towards intelligence and
universality.
REFERENCES
Erbil, M. E., Özkahraman, M., & Bayrakçı, H. C. (2025).
Comprehensive Performance Analysis and Evaluation
of Various Maze Solving Algorithms for Optimized
Autonomous Navigation and Pathfinding. Fırat
Üniversitesi Mühendislik Bilimleri Dergisi, 37(1), 151-
166.
Jain, A., Vaidehi, N., & Rodriguez, G. (1993). A fast
recursive algorithm for molecular dynamics simulation.
Journal of computational physics, 106(2), 258-268.
Li, Y., Wang, J., & Chen, Z. (2024). Dynamic Branch
Adaptation in Binary Tree Maze Navigation: A
Reinforcement Learning Approach. IEEE Transactions
on Robotics, 40(3), 876-889.
McClendon, M. S. (2001, July). The complexity and
difficulty of a maze. In Bridges: Mathematical
connections in art, music, and science (pp. 213-222).
Patle, B. K., Parhi, D. R. K., Jagadeesh, A., & Kashyap, S.
K. (2018). Matrix-Binary Codes based Genetic
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
488

Algorithm for path planning of mobile robot.
Computers & Electrical Engineering, 67, 708-728.
Rashid, A. T., Ali, A. A., Frasca, M., & Fortuna, L. (2013).
Path planning with obstacle avoidance based on
visibility binary tree algorithm. Robotics and
Autonomous Systems, 61(12), 1440-1449.
Safak, A. B., Bostanci, E., & Soylucicek, A. E. (2016).
Automated maze generation for Ms. Pac-Man using
genetic algorithms. International Journal of Machine
Learning and Computing, 6(4), 226-240.
Smith, J. (2024). Comparison of Maze-solving Algorithms.
Journal of Computer Science.
Wang, X. (2024, December). OCaml-based Recursive
Backtracking and Aldous Broder algorithms in solving
maze challenges. In AIP Conference Proceedings (Vol.
3194, No. 1). AIP Publishing.
Zhang, Z., Chen, J., & Zhao, W. (2024). Multi‐AGV route
planning in automated warehouse system based on
shortest‐time Q‐learning algorithm. Asian Journal
of Control, 26(2), 683-702.
A Research on the Generalization Capability of Recursive Backtracking and Binary Tree Algorithm Path Searching: An Experimental
Analysis Based on Complex Maze Structures
489
