
An LLM-Based Interaction System with Multimodal Emotion
Recognition and Self-Learning Mechanism in Intelligent Electronic
Pets
Ruize Wang
a
College of Design and Innovation, Tongji University, Shanghai, Shanghai, China
Keywords: Intelligent Electronic Pet, Emotional Feedback, Self-Learning Mechanism, Multimodal Perception, Large
Language Model (LLM).
Abstract: This study presents an LLM-based interaction system for intelligent electronic pets, aiming to enhance
emotional adaptability and personalized feedback through multimodal perception technology and self-
learning. Traditional electronic pets rely on fixed interaction modes, limiting their ability to provide
individualized emotional responses. The proposed system, structured into three layers—perception, decision,
and execution—uses various sensors to gather user emotions, environmental data, and preferences, then
applies LLM technologies like GPT-4 to generate adaptive feedback. The system's self-learning capability
continuously optimizes responses based on evolving user interactions. Virtual user samples were created to
simulate system decision-making, and the feedback was evaluated across multiple dimensions. Results
showed superior emotional alignment, feedback diversity, and adaptability compared to unimodal and rule-
based models, highlighting the system's exceptional self-learning capabilities. This research underscores the
critical role of LLMs in multimodal emotion processing and self-learning, offering theoretical and technical
guidance for the use of intelligent electronic pets in emotional support and companionship applications.
1 INTRODUCTION
Smart electronic pets, or companion robots, have
gained significant attention for their emotional
support capabilities, especially in healthcare
applications such as aiding mental health patients,
supporting the elderly, and facilitating emotional
healing (Nimmagadda, Arora, & Martin, 2022).
However, traditional systems often rely on fixed
interaction modes, limiting their adaptability to users'
emotional changes and hindering the establishment of
long-lasting emotional connections with users. This
challenge, coupled with the lack of research on the
evolution of emotional connections over time in
human-computer interactions, impedes the
development of deeper emotional bonds between
smart electronic pets and their users (Kumar et al.,
2024).
Recent studies in artificial intelligence and
robotics focus on enhancing emotion recognition
technologies, including facial expression recognition
a
https://orcid.org/0009-0008-9963-6450
and speech emotion analysis. Despite advances, these
technologies face challenges regarding real-time
responsiveness and the accuracy of emotional
feedback, which are critical for adjusting robot
behavior and refining personalized emotion models
(Spezialetti, Placidi, & Rossi, 2020). To address these
issues, research is increasingly emphasizing
multimodal perception technology and self-learning
mechanisms to improve real-time responsiveness,
accuracy, and adaptability, allowing electronic pets to
interact more naturally and build deeper emotional
connections with users (Ramaswamy &
Palaniswamy, 2024).
The emotional perception capabilities of
intelligent electronic pets have significantly
improved with advancements in multimodal sensing
technology. Integrating facial expression recognition,
voice analysis, tactile perception, and EEG signals
with multimodal fusion strategies enhances the
system's ability to capture user emotions and respond
more effectively (Ramaswamy & Palaniswamy,
2024; Tuncer et al., 2022). Additionally, the
Wang, R.
An LLM-Based Interaction System with Multimodal Emotion Recognition and Self-Learning Mechanism in Intelligent Electronic Pets.
DOI: 10.5220/0014360700004718
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2025), pages 423-431
ISBN: 978-989-758-792-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
423

incorporation of self-learning and artificial
intelligence enables these systems to adapt their
behavior over time, providing personalized emotional
feedback and fostering stronger emotional bonds
between pets and users (Shenoy et al., 2022; Yang et
al., 2020). The development of large language models
(LLM) has further enhanced the ability of intelligent
systems to understand and manage complex
emotions, facilitating improved interaction scenarios
through natural language processing and generation
technology (Chandraumakantham et al., 2024). These
systems can dynamically adapt to users' emotional
states and anticipations, presenting new possibilities
for affective computing (Jiang et al., 2025).
This study aims to develop an intelligent
electronic pet interaction system that leverages
emotional feedback and a self-learning mechanism.
By integrating multimodal emotion perception
technology and using LLM as the core decision
engine, the system can perceive users' emotional
states, environmental changes, and evolving
preferences in real time. Through continuous self-
learning, the system adapts the pet's behavior to
provide personalized emotional feedback, enhancing
the user experience and fostering stronger emotional
connections with users.
Simulation experiments using public multimodal
datasets are conducted to validate the multimodal
perception and feedback effects of the decision
engine based on LLM. The AffectNet dataset is used
here to classify several basic emotions and obtain
facial expression information. The IEMOCAP dataset
is also used to obtain information on the
correspondence between speech, expression, and
emotion. In addition, there is some public data to
determine the categories of environmental factors and
user preferences. These experiments assess the
model's ability to understand user preferences,
personalized feedback, and evaluate its adaptability,
feedback accuracy, and self-learning potential in a
non-real-time offline environment.
Currently, smart pet designs largely focus on
improving technical aspects such as emotion
recognition accuracy and user interaction. The
primary goal of these advancements is to enhance
user experience, strengthen emotional connections,
and enable the device to empathize with the user
(Abdollahi et al., 2023). This research aims to provide
a theoretical foundation and technical support for the
development of emotionally supportive devices. It
encourages the use of smart electronic pets in family
companionship, elderly care, and emotional therapy
while advocating for the integration of multimodal
perception and LLM in emotional computing.
2 METHODOLOGY
2.1 Overall System Architecture
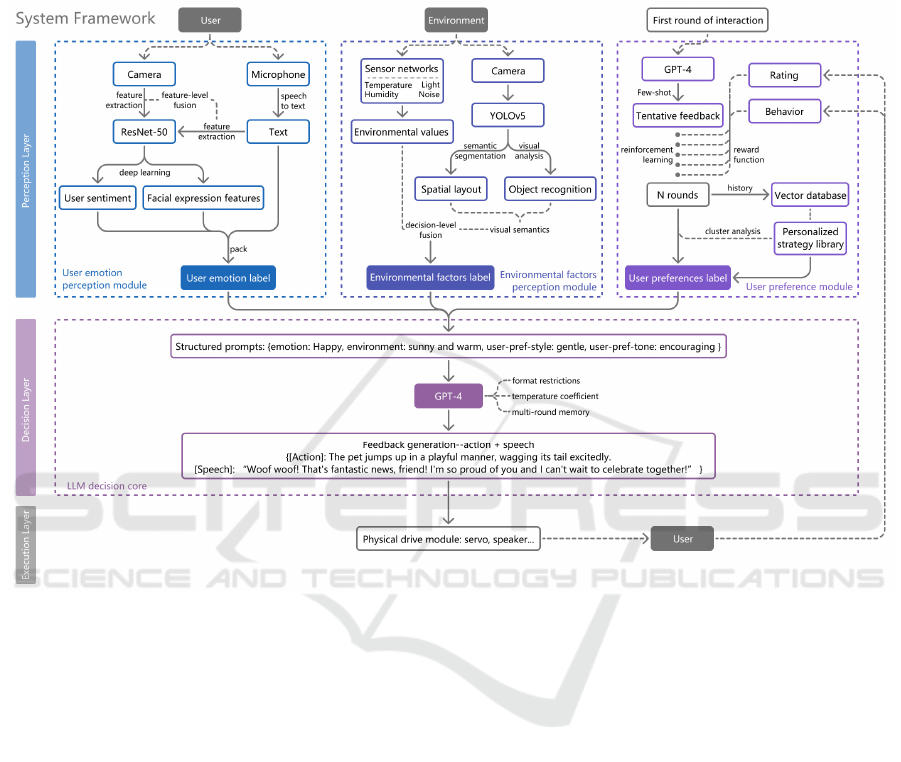
The intelligent electronic pet interaction system
utilizes a layered architecture for emotion-driven
dynamic interaction (Figure 1). It consists of three
layers: the perception layer integrates user emotions,
environmental factors, and preferences, using
multimodal sensors and deep learning models to
analyze real-time data; the decision layer, powered by
LLM, merges multimodal inputs to generate
personalized feedback; and the execution layer
produces pet movements and voice feedback through
drive modules like servos and speakers, while
collecting user behavior data for model optimization.
The data flow involves extracting features from
the perception layer and structuring them into
prompts (e.g., {emotion: Happy, environment: sunny
and warm, user-pref-style: gentle, user-pref-tone:
encouraging}), which are fed into the LLM. The LLM
generates feedback instructions (e.g., {[Action]: The
pet jumps up in a playful manner, wagging its tail
excitedly. [Speech]: “Woof woof! That's fantastic
news, friend! I'm so proud of you and I can't wait to
celebrate together!”}), guiding the execution layer.
Feedback is adjusted dynamically through
reinforcement learning, with preference models
undergoing closed-loop optimization.
2.2 Perception Layer
2.2.1 User Emotion Perception Module
This module enhances emotion recognition by
integrating visual and auditory signals (Figure 1). A
1080P camera captures facial images at 15FPS, using
a ResNet-50 model trained on the AffectNet dataset
to classify 7 basic emotions: Happy, Sad, Anger,
Normal, Disgust, Fear, Surprised. For auditory
perception, a directional microphone captures sound,
while emotion intensity is assessed through speech-
to-text and voiceprint analysis. In case of a mismatch
between visual and auditory signals, voice features
are prioritized and flagged for verification. The
module outputs structured emotion labels, expression
features, and speech text for LLM decision-making.
2.2.2 Environmental Factors Perception
Module
Environmental perception adjusts pet behavior to
physical environments using sensor networks and
visual scene analysis (Figure 1). Sensors monitor
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
424
temperature, humidity, light intensity, and noise
levels, while YOLOv5 is used to recognize objects,
like an "umbrella" for a rainy-day response. Semantic
segmentation determines spatial layouts such as
"crowded" or "open". Data from sensors and visual
semantics are fused, creating environmental labels
like {environment: Cold and rainy} for LLM
decision-making.
Figure 1: Framework of the intelligent electronic pet interaction system (Picture credit: Original).
2.2.3 User Preference Module
This module forms the basis for self-learning (Figure
1). Initially, the system interacts with the user using a
default template (e.g., 'gentle and encouraging') and
utilizes a few-shot prompts to guide the LLM in
generating preliminary feedback. After each
interaction, the system records explicit ratings and
implicit behaviors. A reward function improves
learning, and a vector database stores interaction
fragments for future reference. The system refines
response styles based on past interactions, creating a
personalized strategy library by clustering user
behavior patterns over time.
2.3 Decision Layer
The LLM integrates data from the user's emotions,
environmental factors, and preference modules to
make emotional decisions and provide feedback
(Figure 1). The LLM serves as the system's
"emotional brain," transforming multimodal data into
structured prompts, such as {emotion: Happy,
environment: sunny and warm, user-pref-style:
gentle, user-pref-tone: encouraging}. Prompt
engineering ensures valid responses, while multi-
round memory preserves conversation history for
consistency. A temperature coefficient controls
randomness in feedback generation. The action
library defines 50 fundamental behaviors, which
LLM combines to create compound actions or
generate more complex actions independently.
2.4 Execution layer
The execution layer translates JSON instructions
from the decision layer into physical actions. It
includes the multimodal output module and real-time
feedback acquisition module (Figure 2). Pet
movements are controlled by a servo system with 50
basic behaviors, using a PWM signal smoothing
algorithm.
The TTS engine converts text feedback
An LLM-Based Interaction System with Multimodal Emotion Recognition and Self-Learning Mechanism in Intelligent Electronic Pets
425

Figure 2: Framework of the execution layer (Picture credit: Original).
into adaptive speech based on user preferences. User
feedback is captured via cameras and microphones,
processed for reinforcement learning, and fed back to
the preference model for real-time optimization. This
layer forms a self-iterative loop of emotional
decision-making, behavior output, and feedback
optimization, ensuring authentic emotional
expression and adaptability.
3 EXPERIMENTS
3.1 Verification of the Multimodal
Processing and Feedback
Capabilities of the LLM Decision
Engine
Given the maturity and accuracy of existing emotion
perception technology and environmental perception
technology, this simulation experiment assumes the
three perception modules have yielded results. It
generates user samples labelled by these modules,
which are processed by the LLM decision engine to
simulate system functionality and validate the
multimodal approach's superiority over alternative
models.
User samples are created using the AffectNet and
IEMOCAP datasets, which include seven basic
emotions: Happy, Sad, Anger, Normal, Disgust, Fear,
and Surprise. Each emotion is paired with
corresponding facial expressions and speech texts,
forming user emotion labels. For example, {Happy,
"smiling face, bright eyes", "I got the job! I'm so
excited!"}. Five environmental factors (e.g., Sunny
and warm, Cold and rainy) and five user preferences
(e.g., gentle and encouraging, playful and cheerful)
are also selected as labels. A complete sample
consists of emotion, facial description, speech text,
environmental factors, and user preferences (e.g.,
{emotion: Happy, facial_desc: “smiling face, bright
eyes”, speech_text: “I got the job! I'm so excited!”,
environment: sunny and warm, user_pref_style:
gentle, user_pref_tone: encouraging}) (Figure 3).
Figure 3: Schematic diagram of virtual user sample settings (Picture credit: Original).
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
426
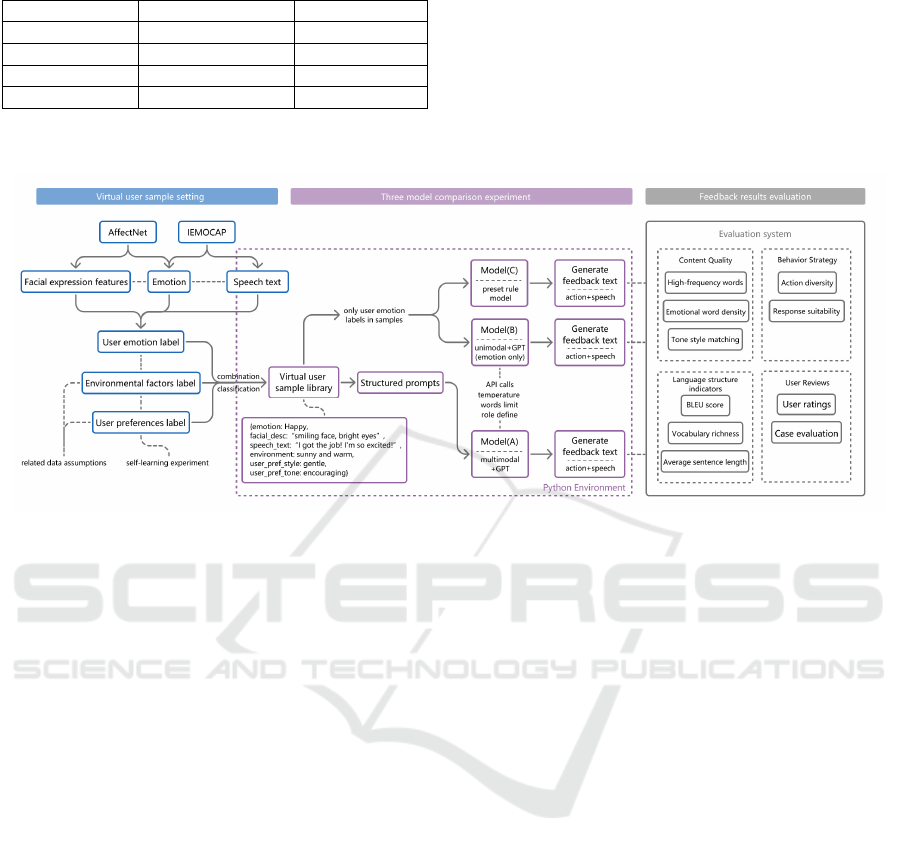
Table 1: Virtual user sample grouping.
Cate
g
or
y
Variable Quantit
y
Grou
p
1 Emotion 7
Grou
p
2 Environment 5
Group3 Preference 5
Group4 Rando
m
18
The samples were categorized into four groups for
analysis: one with only the emotion label changed (7
groups); one with only the environment label changed
(5 groups); one with only the user preference label
changed (5 groups); and a random combination of
three labels (18 groups) ensuring coverage of all
labels (Table 1). This analysis evaluates the system's
ability to adapt to emotional changes, environmental
shifts, user preferences, and overall performance.
Figure 4: Experimental flow chart for verification of the multimodal processing and feedback capabilities of the LLM decision
engine (Picture credit: Original).
This study employs a control experiment for
model establishment (Figure 4). The experiment uses
three models: (A) multimodal + GPT, (B) unimodal
(emotion-only) + GPT, and (C) preset rule model.
Virtual user samples are processed by these models to
evaluate feedback performance. The GPT-4 API
converts sample data into structured prompts, with
GPT providing behavioral (1 sentence) and voice (1-
2 sentences) feedback. Feedback is collected for
analysis, with a temperature coefficient of 0.7 and a
150-character limit to control randomness and length.
Results compare the models across four
dimensions: content quality, including high-
frequency words, emotional word density, and tone
style matching; behavior strategy, including action
diversity statistics and response suitability analysis;
language structure, including BLEU score,
vocabulary richness, average sentence length, and
number of emotional words; and qualitative analysis,
including user ratings of feedback and evaluation of
typical cases. These comparisons demonstrate the
advantages of the multimodal + GPT model over the
other models, identify shortcomings, and explore
optimization methods.
3.2 Verification of User Understanding
and Personalized Adjustment of
LLM Under Self-learning
Mechanism
Smart pets can comprehend user preferences, adapt
feedback dynamically, and produce personalized
responses. This capability is crucial for fostering a
sense of equal emotional engagement with smart pets
and forming emotional bonds. This experiment
evaluates the system’s self-learning capability and
personalized adaptability using the multimodal +
GPT model through multiple rounds of interaction.
The experimental process (Figure 5) involves
selecting a fixed user sample combination, initially
without the user preference label. Subsequent rounds
incorporate feedback and prompt words to simulate
user feedback (e.g., {user_pref_style: brief,
user_pref_tone: calm}, with prompt words {The
behavior should be concise. Maintain a calm and brief
tone.}). By using historical context, GPT
autonomously learns and refines user preferences
over multiple rounds.
The experiment consists of 20 rounds, with
feedback results analyzed across three key aspects:
action evolution, tracking convergence to the desired
style; speech optimization, including sentence length,
An LLM-Based Interaction System with Multimodal Emotion Recognition and Self-Learning Mechanism in Intelligent Electronic Pets
427
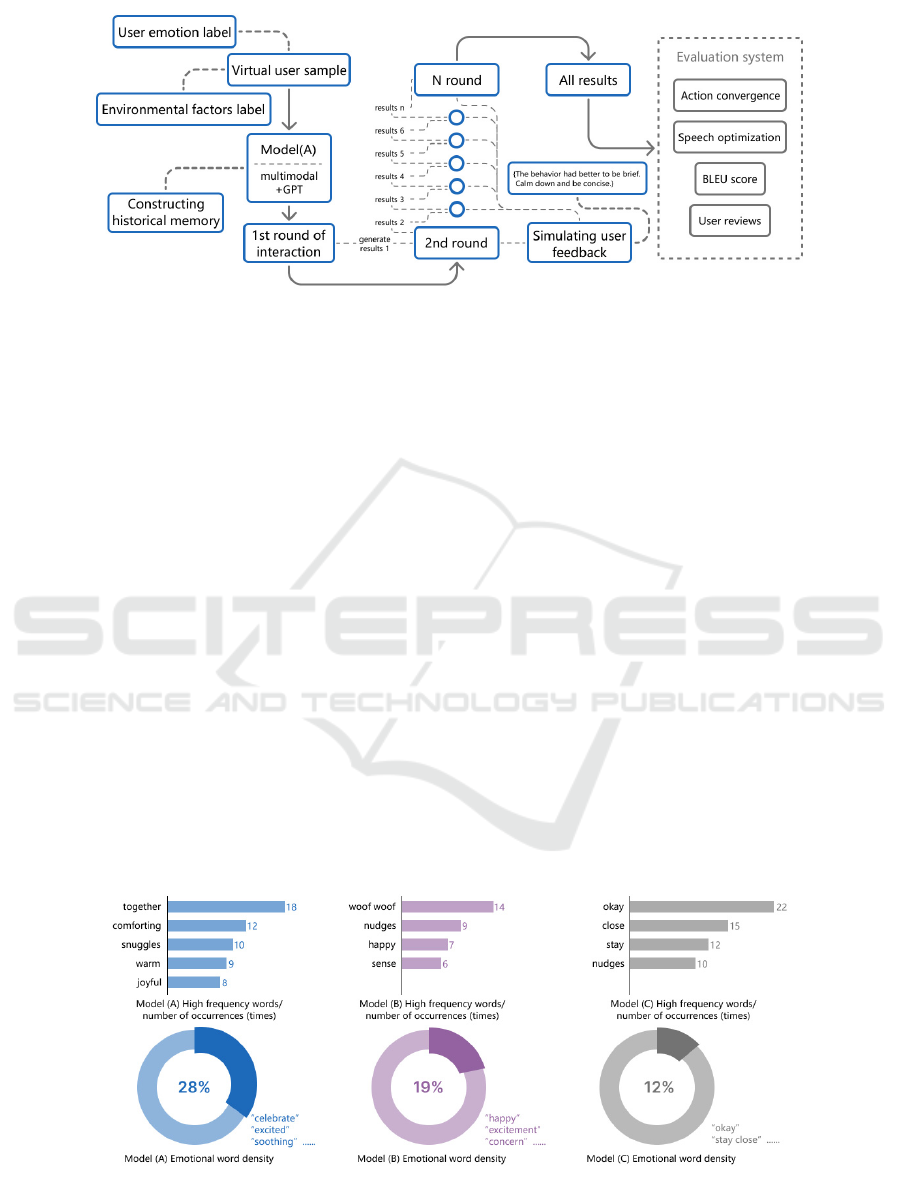
Figure 5: Experimental flow chart for verification of user understanding and personalized adjustment of LLM under self-
learning mechanism (Picture credit: Original).
vocabulary diversity and other linguistic aspects; and
BLEU score, assessing feedback content similarity.
Qualitative analysis evaluates system learning
efficiency, personalization, and error detection. This
experiment complements the multimodal study,
testing the system’s self-learning and user preference
adaptation capabilities, identifying areas for
improvement and optimization.
4 RESULTS AND DISCUSSIONS
4.1 Experimental Results and
Evaluation of the Multimodal
Processing and Feedback
Capabilities of the LLM Decision
Engine
The experimental results show that model A, utilizing
multimodal input combined with GPT, outperforms
unimodal model B and rule-based model C in
emotional fit, feedback diversity, and personalized
adaptability. Model A uses comforting words like
“together” (18 times), “snuggles” (10 times), “joyful”
(8 times), and “warm” (9 times). Its emotional word
density is 28%, higher than model B’s 19% and
model C’s 12% (Figure 6). Model A also excels in
emotional fit. For example, when the user expresses
fear, model A provides physical and verbal comfort,
enhancing emotional support authenticity, while
model C’s “It’s okay” seems robotic, and model B
lacks context adaptation (Figure 7). Model A tailors
responses based on the environment, showing a
“gentle+encouraging” tone, like “purring softly” in a
“Cold and rainy” setting. Model B occasionally
conflicts with style (e.g., “Woof woof” in formal
settings), while model C relies on fixed templates.
In terms of behavioral strategies, Model A offers 22
unique actions, including "hops," "cuddles," and
"wraps ears," while Models B and C support only 14
and 9 actions, respectively. For instance, in the Anger
Figure 6: Model (A) (B) (C) High-frequency words and emotional word density statistics (Picture credit: Original).
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
428

Figure 7: Diagram of comparative analysis of typical feedback content of models (A) (B) (C) (Picture credit: Original).
Figure 8: Model (A) (B) (C) High-frequency words and emotional word density statistics (Picture credit: Original).
scenario, Model A combines behavior and language
effectively, saying, "The pet gently nuzzles against
the user's leg, emitting a soothing purring sound,"
while Model B repeats, "The pet nudges the user's
hand." In the Fear scenario, Model A combines
physical and verbal comfort, whereas Model B only
“rubs against leg.” In the Disgust scenario, Model B’s
response, "The virtual pet grimaces and moves
away," could increase discomfort.
Regarding language structure, Model A shows
significantly higher vocabulary diversity compared to
B and C. The average BLEU score of 0.04 indicates a
low level of template reliance (Figure 8). Model A
generates content with an average sentence length of
12 words, each containing 2.5 emotional words,
demonstrating its ability to produce diverse and
emotionally engaging responses.
4.2 Experimental Results and
Evaluation of User Understanding
and Personalized Adjustment of
LLM under Self-learning
Mechanism
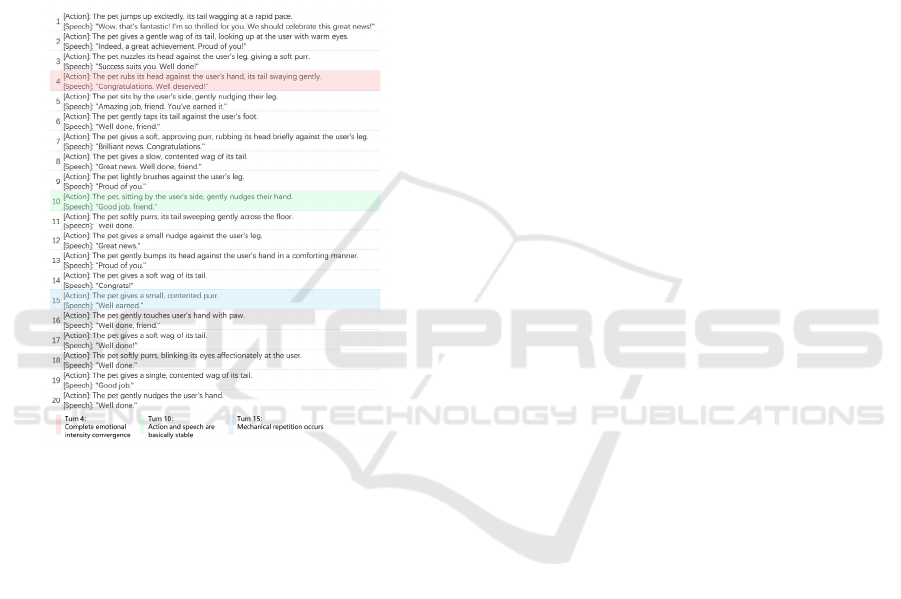
Multiple rounds of interaction experiments
demonstrate the system's ability to align with user
preferences through self-learning. For example,
feedback evolved from "Wow, that's fantastic! We
should celebrate!" to "Well earned" by the 15th round
in response to the "brief and calm" preference.
Behaviorally, the action "jumps up excitedly, tail
wagging at rapid pace" (40%) was gradually replaced
by "gently nudges the user's hand" (65%), reflecting
the preference for "simple interaction."
Figure 9: BLEU score statistics for each round of interactive feedback results compared with the previous round of feedback
results (Picture credit: Original).
An LLM-Based Interaction System with Multimodal Emotion Recognition and Self-Learning Mechanism in Intelligent Electronic Pets
429
BLEU score analysis shows that as the interaction
rounds increase, feedback similarity rises in a zigzag
manner, stabilizing at 0.08 after the 15th round,
indicating the model's gradual adaptation to the user
preference template (Figure 9). Vocabulary diversity
dropped from 0.72 in round 1 to 0.55 in round 20,
showing language style convergence. Excessive
repetition, like "Well done" appearing 8 times, may
reduce freshness, but in real environments, fewer than
15 rounds of the same emotion and environment are
common, and changes in other factors will increase
diversity.
Figure 10: Diagram of self-learning process and key nodes
(Picture credit: Original).
Qualitative analysis revealed that emotional
intensity transitioned from "thrilled for you" to
"Proud of you" between the 2nd and 4th rounds. By
the 10th round, actions settled on "nudge/purr," with
language becoming a 2-3-word phrase, completing
the learning process (Figure 10). Feedback in later
rounds received a user rating of 8.5/10 for
naturalness, higher than the initial 6.2/10, though
users noted a lack of surprise.
The experiment also identified constraints in the
self-learning mechanism. When user preferences
change, the model requires 5-7 rounds to fully adjust,
suggesting the need for better long-term memory
optimization. Despite this, the system's personalized
adaptation across multiple rounds validates the
efficacy of its self-learning mechanism.
4.3 Discussions
The intelligent electronic pet system in this study
shows significant advantages in naturalness and
personalization of emotional interaction through
LLM-driven multimodal perception and self-
learning. Experiments validate its ability to integrate
user emotions, environment, and preferences,
outperforming unimodal and rule-based models in
emotional fitness and behavior diversity. The self-
learning mechanism ensures rapid convergence of
user preferences within 10 interaction rounds.
However, the system faces key limitations:
multimodal fusion causes reasoning delays of up to
600ms, dynamic preference adjustments lag, and
repetitive feedback reduces interaction freshness.
To validate real-world scenarios, future research
should include long-term tests with diverse groups,
assess emotional connection efficiency in the elderly,
explore strategies for managing conflicting user
needs, and incorporate physiological signals such as
EEG for improved emotion recognition. Future
efforts should focus on expanding multimodal
dimensions, optimizing lightweight LLM
architecture for real-time performance, and
developing an emotional migration mechanism to
predict emotional trends.
This study highlights the potential of LLM in
effective computing while stressing the need to
address security risks and ethical concerns in
generated content. Advancing the integration of
affective computing and embodied intelligence is the
key future direction.
5 CONCLUSIONS
This study has successfully developed and validated
an intelligent electronic pet interaction system that
integrates multimodal perception and an LLM to
enhance emotional engagement and personalization.
The experimental results highlight the system's ability
to dynamically adjust to user needs, providing
personalized emotional feedback through a self-
learning mechanism. This mechanism allows the
system to adapt and refine its interactions based on
user preferences, improving both the naturalness and
personalization of the pet's responses. The
multimodal fusion approach driven by LLM
significantly enhances the system's situational
awareness, enabling it to respond effectively to a wide
range of emotional cues and environmental
conditions.
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
430

Additionally, the self-learning and historical
memory components allow the system to rapidly
converge toward user preferences, ensuring that
interactions become more attuned to the user's
emotional state over time. However, challenges
remain in optimizing real-time performance, reducing
reasoning delays, and improving the consistency of
feedback. Despite these challenges, the system
demonstrates a strong foundation for emotional
support interactions.
This study introduces innovative concepts for the
integration of emotional computing and embodied
intelligence, offering valuable insights into the
potential applications of intelligent electronic pets in
areas such as emotional therapy, elderly care, and
mental health support. The ultimate goal is to push the
boundaries of emotional computing, improving the
depth and authenticity of human-computer emotional
interaction.
REFERENCES
Abdollahi, H., Mahoor, M. H., Zandie, R., Siewierski, J., &
Qualls, S. H. (2022). Artificial emotional intelligence in
socially assistive robots for older adults: a pilot study.
IEEE Transactions on Affective Computing, 14(3),
2020-2032.
Kumar, C. O., Gowtham, N., Zakariah, M., & Almazyad, A.
(2024). Multimodal emotion recognition using feature
fusion: An llm-based approach. IEEE Access.
Jiang, Y., Shao, S., Dai, Y., & Hirota, K. (2024, July). A
LLM-Based Robot Partner with Multi-modal Emotion
Recognition. In International Conference on Intelligent
Robotics and Applications (pp. 71-83). Singapore:
Springer Nature Singapore.
Yang, J., Wang, R., Guan, X., Hassan, M. M., Almogren,
A., & Alsanad, A. (2020). AI-enabled emotion-aware
robot: The fusion of smart clothing, edge clouds and
robotics. Future Generation Computer Systems, 102,
701-709.
Kumar, S. S., Apsal, M., Raishan, A. A., Jessy, R. M., &
Prasad, V. S. K. (2024). A systematic review of the
design and implementation of emotionally intelligent
companion robots. International Research Journal of
Engineering and Technology (IRJET), 11(9), 1–15
Nimmagadda, R., Arora, K., & Martin, M. V. (2022).
Emotion recognition models for companion robots. The
Journal of Supercomputing, 78(11), 13710-13727.
Ramaswamy, M. P. A., & Palaniswamy, S. (2024).
Multimodal emotion recognition: A comprehensive
review, trends, and challenges. Wiley Interdisciplinary
Reviews: Data Mining and Knowledge Discovery,
14(6), e1563.
Shenoy, S., Jiang, Y., Lynch, T., Manuel, L. I., & Doryab,
A. (2022, August). A Self Learning System for Emotion
Awareness and Adaptation in Humanoid Robots. In
2022 31st IEEE International Conference on Robot and
Human Interactive Communication (RO-MAN) (pp.
912-919). IEEE.
Spezialetti, M., Placidi, G., & Rossi, S. (2020). Emotion
recognition for human-robot interaction: Recent
advances and future perspectives. Frontiers in Robotics
and AI, 7, 532279.
Tuncer, T., Dogan, S., Baygin, M., & Acharya, U. R. (2022).
Tetromino pattern based accurate EEG emotion
classification model. Artificial Intelligence in Medicine,
123, 102210.
An LLM-Based Interaction System with Multimodal Emotion Recognition and Self-Learning Mechanism in Intelligent Electronic Pets
431
