
Application of Multi-Modal Interaction Based on Augmented Reality
to Enhance the Environment Perception and Cabin Experience of
Intelligent Car
Gangqi Wu
a
Maynooth International School of Engineering, Fuzhou University, Fuzhou, Fujian, China
Keywords: Intelligent Vehicles, Multi-Modal Interaction, AR.
Abstract: The application of human-computer interaction in intelligent vehicles has become quite mature, which
improved the performance of the vehicle. However, the use of multi-modal interactions presents redundancy,
and the resulting functional stacking and conflict issues urgently need to be resolved. Therefore, the fusion
strategy of multi-modal interaction in intelligent vehicles is particularly important. In order to further upgrade
intelligent vehicles, this study analyzed the limitations of current interaction methods on deficiencies from
the perspectives of vehicle environment perception ability and cabin experience. Then, starting from
augmented reality, the research integrates the interaction modes of various modalities through a car mounted
AR system, alleviating the limitations of single modal interaction and the problems caused by rigid fusion of
multi-modal interaction. This can significantly enhance the safety, convenience, and intelligence of vehicles.
This paper aims to provide theoretical support and practical ideas for the multi-modal interaction fusion of
intelligent vehicle systems, and to provide a reference for more efficient and user-friendly human-computer
interaction design in the future.
1 INTRODUCTION
Modern intelligent vehicles are widely used and
developing rapidly, which urgently needs to address
issues such as safety, practicality, and comfort.
Compared to the traditional view of "people adapting
to cars" in automobiles, intelligent cars aim to "adapt
to people" and gradually transition towards "mutual
adaptation between people and cars"(Gao et al.,
2024). Therefore, in order to address the multifaceted
issues in the development of intelligent vehicles,
researchers need to consider both the "human" and
"environmental" aspects, not only focusing on
improving the driver's cabin experience but also
taking into account the enhancement of the vehicle's
environmental perception ability. This study focuses
on the application of multi-modal interaction in
intelligent vehicles, for comprehensively promoting
the upgrading and development of intelligent vehicles
in terms of environmental perception and cabin
experience.
a
https://orcid.org/0009-0005-5058-3659
The early field of intelligent cars focused on
"autonomous driving" and conducted relatively
simple research on remote-controlled cars. It was not
until 1969 that John McCarthy, the father of artificial
intelligence, proposed in his book "Computer
Controlled Cars" that intelligent cars shifted from
"human control" to "computer control" when users
input a destination to drive the car. But the research
scope of intelligent cars still remains at the stage of
intelligent driving, without considering the driver's
experience in the vehicle cabin. Low level human-
computer interaction still cannot make it a truly
intelligent car. In recent years, significant progress
has been made in the research of intelligent vehicles.
Researchers are focusing on building models and
improving the Intelligent Driver Model (IDM). There
are models in vehicle environment perception, such
as modeling the following behavior and driving style
of intelligent cars based on generative adversarial
learning, and upgrading the longitudinal following
system (Zhou et al., 2020; Xu et al., 2024). At the
same time, the application of various interactive
Wu, G.
Application of Multi-Modal Interaction Based on Augmented Reality to Enhance the Environment Perception and Cabin Experience of Intelligent Car.
DOI: 10.5220/0014355400004718
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2025), pages 359-364
ISBN: 978-989-758-792-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
359
methods in intelligent cockpits, such as using
electroencephalography(EEG) signals to observe the
driver's cognitive response and examining the driver's
color perception based on visual neural networks
(Zhang et al., 2024; Zhao, 2022), is used to enhance
the user's cockpit experience. Research on modeling
and analysis of multi-modal interaction methods both
inside and outside the cabin, continuously improving
the research system of intelligent vehicles.
However, the existing studies on intelligent
vehicles often focus on the perception and recognition
ability of vehicles, specifically analyzing the
application of core technologies such as artificial
intelligence, edge computing, sensors and other
technologies in vehicles, or simply examining the
human-machine interaction level and future
development trend of intelligent cockpits unilaterally,
without fully considering various factors such as
drivers, vehicles, and environment. Also, the multi-
modal interaction applied in intelligent vehicles has
the problem of redundancy, which is not conducive to
the driver's operation in terms of convenience and
safety. This study focuses on multi-modal interaction,
analyzes and evaluates the existing interaction modes
of intelligent vehicles. And by combining the driver's
cabin experience with the environmental perception
of intelligent vehicles, it explores how to enhance the
integration of intelligent vehicle cabin and exterior
through the creation of a multi-modal interactive
fusion AR in car system, forming a closed-loop
interaction of "human-vehicle-environment".
2 INTELLIGENT CAR
INTERACTION METHODS
2.1 Visual Image Interaction
Any text or material outside the aforementioned
margins will not be printed.The application of visual
image interaction in intelligent vehicles is very
common. The visual interaction equipment inside the
cabin consists of input and output terminals. The
camera at the input end monitors the driver's posture,
face, hands, and other aspects in all directions to
detect the driver's emotions or abnormal states (such
as signs of fatigue) (Guerrero-Ibáñez et al., 2018).
The display screen at the output end provides various
feedback, including passenger status, vehicle status,
road status, etc, bringing users a nice cabin
experience. On the other hand, the visual image
interaction outside the cabin reminds the driver of
obstacles, pedestrians, traffic lights, and other factors
on the road, in order to improve the convenience and
safety of driving. In addition, the application of night
vision assistance programs (David et al., 2006)
outside the cabin has greatly improved the safety
level of intelligent vehicles driving at night, helping
drivers to more quickly detect potential threats on the
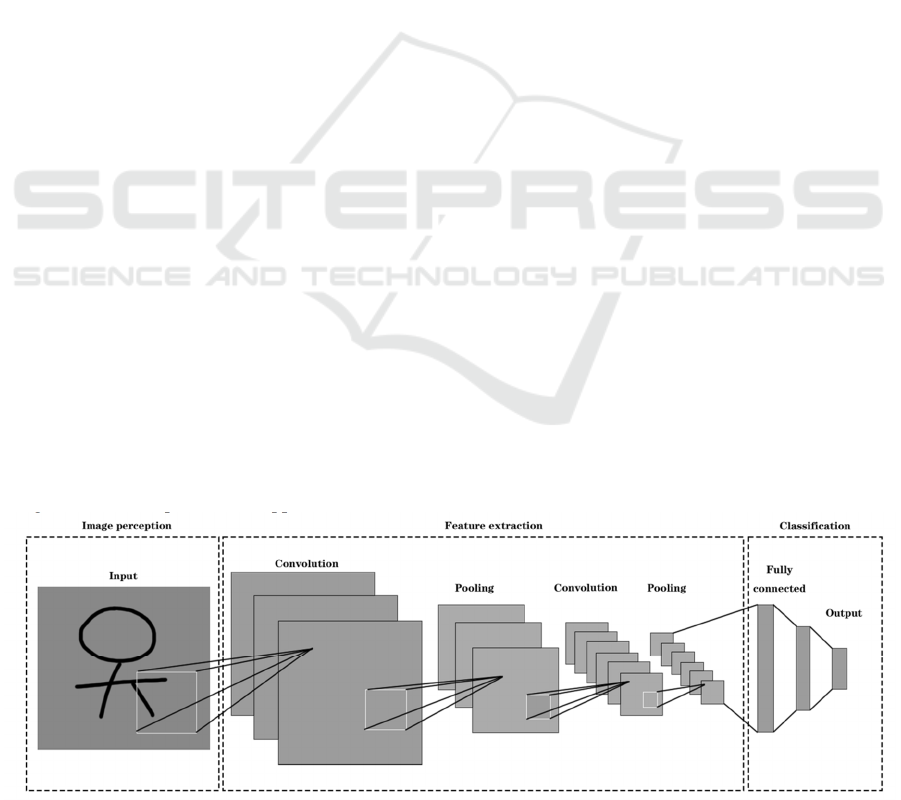
road at night. The most important visual image
interaction method,
whether inside or outside the cabin, is computer
vision (CV). It relies on camera capture and utilizes
deep learning algorithm models such as YOLO and
CNN to perform real-time analysis and target object
detection through the process of image perception,
feature extraction, training learning, and
classification decision-making (as shown in Figure
1). However, while improving the user experience,
visual image interaction still has its immaturity. For
example, the feedback provided by the display screen
to the driver may cause interference, leading to
distraction in real-time road conditions and vehicle
driving, and potentially creating safety hazards.
Figure 1: CNN flowchart (Picture credit: Original).
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
360

2.2 Touch Interaction
The application of touch interaction in intelligent
vehicles is mainly reflected in the cabin, and its main
devices are the onboard electronic touch screen and
physical touch elements (buttons, knobs, sliders, etc).
Vehicle touch screen is an important channel for
achieving human vehicle interaction, which can input
based on the finger operations of the driver and
passengers, and complete feedback and output
according to requirements. At the same time, the
linkage between the touch screen and other modules
(such as audio, Internet of Vehicles (IoV), etc.)
enables more convenient functions like car music
playback, weather forecasting, map navigation, etc.,
enhancing practicality and entertainment. The car
touch screen has multiple forms. According to
technical principles, it includes capacitive touch
screens, force feedback touch screens, infrared
optical touch screens, etc. They are applied to
scenarios with different precision and screen sizes
based on different needs. On the other hand, the
physical touch elements in vehicles belong to Active
Haptics, which require external electrical input to
present tactile feedback. Sensors rely on user
movements (orthogonal, tangential, or rotational) as
shown in Figure 2 to react and trigger actuators
(Breitschaft et al., 2019) to control vehicle modules
(such as window opening and closing, seat
adjustment, and mirror fine-tuning), with high
programmability and flexibility. Although touch
interaction has greatly improved the convenience,
practicality, and entertainment inside the cabin,
problems such as accidental touch during bumpy
driving, strong lighting affecting the use of the touch
screen, and redundant buttons still need to be solved
urgently.
Figure 2 Sketch map of haptics (Breitschaft et al., 2019).
2.3 Voice Interaction
In terms of enhancing the cabin experience, visual
and touch interactions in smart cars have always had
the problem of excessive occupation of the driver's
line of sight, which has instead increased the
difficulty of operation and reduced driving safety.
Therefore, in the field of intelligent vehicles, the
applications of natural language interaction based on
speech recognition are the trend. Among them,
automatic speech recognition (ASR) technology
relies on deep learning models, usually built on the
architecture of Transformer and RNN, and obtains the
voice signals of passengers through steps such as
noise reduction enhancement, frame windowing, and
feature extraction. The main function of natural
language processing (NLP) technology is to perform
semantic and sentiment analysis on extracted text to
understand user needs and provide feedback. In
addition, text to speech (TTS) technology is a branch
of artificial intelligence that converts text into smooth
and natural speech. Based on end-to-end models such
as Transformer and WaveNet, speech synthesis helps
drivers focus on the road ahead and reduce the impact
of text on the line of sight through speech. The
linkage of these several voice technologies
constitutes in car voice interaction. It can indeed
avoid occupying the driver's line of sight and help
them focus on driving. However, research on the
interaction interference of in vehicle information
systems (IVIS) suggests that these voice based
interactions may require high cognitive abilities from
drivers, especially older drivers who require a greater
workload (Strayer et al., 2016). Meanwhile, multi-
modal evaluations of embedded vehicle voice
systems indicate that in vehicle voice interaction
reduces visual demands, but does not eliminate them
(Mehler et al., 2016).
Application of Multi-Modal Interaction Based on Augmented Reality to Enhance the Environment Perception and Cabin Experience of
Intelligent Car
361

2.4 Other Interaction Modes
Biological signal interaction is a new type of
interaction technology for intelligent vehicles. Many
traffic accidents are caused by abnormal physical
conditions of the driver, so biological signal
interaction is particularly important, mainly reflected
inside the intelligent cockpit. It non-invasively
monitors physiological signals such as
electrocardiogram, electroencephalogram,
electromyographic response, and respiration, that is,
obtains relevant information through indirect means
without directly interfering with or disrupting the
normal state of the monitored object (Baek et al.,
2009). Assessing the health and stress status of the
driver, provides prompts and warnings to ensure
driving safety. Additionally, the application of
Vehicle to Everything (V2X) outside the cabin
greatly enhances the interaction between intelligent
vehicles and the road environment, including
interaction with other vehicles (V2V), interaction
with infrastructure such as traffic lights (V2I),
interaction with pedestrians (V2P), etc.V2X links
smart cars with most factors in the environment,
greatly enhancing the car's environmental perception
ability.
3 DISCUSSION
3.1 Limitations of Rigid Hybridization
in Multi-modal Interaction
The diverse interaction methods mentioned above
enhance the car's environmental perception and
intelligent cockpit experience, greatly facilitating the
driver. However, considering that all functions on
smart cars need to meet the premise of "safety", single
modal interaction methods have many limitations. In
the visual and cognitive evaluation of multi-modal
vehicle information systems, researchers analyzed
various task types (such as audio entertainment,
calling and dialing, text messaging and navigation)
and different interaction modes to assess the
measurement of user cognitive needs, visual and
manual needs, subjective workload, and time spent
completing different tasks. It was found that many
IVIS functions were too distracting to be activated
while the vehicle was in motion (Strayer et al., 2019).
Analysis shows that there are also many problems
with the rigid combination of current multi-modal
interaction methods. Firstly, the complex interaction
of various modes has resulted in functional stacking
and conflicts, and the priority issues of various
interaction modes may lead to operational logic
contradictions. Secondly, more interactive methods
will also bring higher learning costs, and users need
to understand the usage of each modality. At the same
time, whether it is visual interaction, touch
interaction, or voice interaction, it will distract the
driver's attention. How to reasonably grasp the degree
of interaction while allowing the driver to concentrate
on driving is an urgent problem to be solved. The
above issues do not cover everything, but they can
basically reflect the limitations of rigid hybridization
in multi-modal interaction.
3.2 Key Technologies for Mitigating
Problems
Augmented Reality (AR) is a technology that
overlays virtual information such as text, images, and
3D models in real time onto the real world, preserving
the perception of the real world while displaying
virtual information. It significantly reduces the
cognitive load of users and extends their senses.
Augmented reality is a clear manifestation of
"machines adapting to humans", which is in line with
the development trend of intelligent cars towards
"cars adapting to humans" and "humans adapting to
each other".
Based on the series of interaction limitations
mentioned above, this article will present a fusion
strategy for multi-modal interaction, which
complements, balances, and integrates the interaction
modes of various modalities from the perspective of
augmented reality. This chapter will demonstrate the
improvement of vehicle environment perception and
cabin experience through the application of several
AR technologies in intelligent vehicles using this
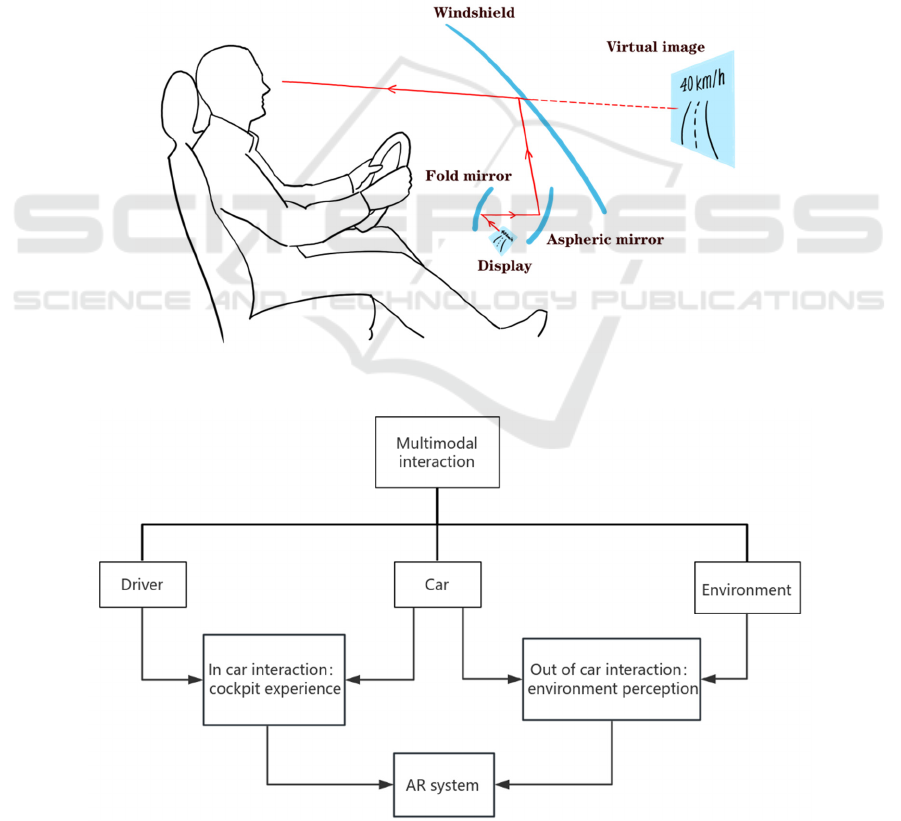
fusion strategy. Augmented Reality Head Up Display
(AR-HUD) directly maps key information in the
driving environment, including heading, speed, lane
markings, collision warnings, etc., onto the front
windshield and presents it in combination with the
real road in front of the driver's eyes (Figure 3).
Panoramic parking assistance virtualizes the bottom
of the vehicle and the road conditions behind it,
creating a panoramic image of the blind spot
environment, upgrading the vehicle's environmental
perception ability and improving parking safety 3D
spatial audio, as an auxiliary technology, integrates
voice interaction into AR systems, reducing noise
interference and improving drivers' speech
comprehension ability. Gesture recognition helps
users manipulate and grasp virtual information, and
compared to touch interaction, it is simpler but more
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
362
practical. These AR based technologies
comprehensively enhance existing visual interaction,
touch interaction, voice interaction, and other aspects.
They integrate existing interaction methods to form a
multi-modal interaction fusion in car AR system,
which comprehensively considers the three factors of
driver, car cabin, and driving environment, forming a
closed-loop interaction of "human car environment"
(Figure 4).In this situation, many problems will be
easily solved. The display screen (i.e. windshield) in
augmented reality seamlessly receives visual
information, meeting the driver's visual needs without
distracting their attention from the road, thus
improving driving safety. Augmented reality
enhances the visual interaction between the front,
side, and rear of the vehicle, achieving environmental
perception visualization, broadening the vehicle's
field of view, and filling in perception blind spots.
The gesture recognition interaction supported by
augmented reality applications reduces the driver's
dependence on touch panels and buttons, focuses
their operations on the road surface, simplifies
operation steps, shortens operation time, and
alleviates the complexity of touch interaction. The
AR floating window text is directly presented on the
front windshield, which greatly reduces the learning
cost, alleviates the burden of voice understanding on
passengers, and reduces the cognitive pressure of
voice interaction.
Figure 3: AR-HUD schematic diagram (Picture credit: Original).
Figure 4: Closed-loop interactive mind map (Picture credit: Original).
Application of Multi-Modal Interaction Based on Augmented Reality to Enhance the Environment Perception and Cabin Experience of
Intelligent Car
363

3.3 Future Development Challenges
Although the multi-modal interaction fusion in car
AR systems has solved many of the above problems,
it still has shortcomings. In strong light environments
or when driving in reverse, the AR projection is not
clear enough, which affects information transmission.
In this case, the detection of user gestures may also
fail and virtual information cannot be manipulated.
Simultaneously, if too much traffic information is
projected onto the AR display device or the
information layout is not reasonable enough, it will
indeed cause information overload problems, which
not only hinder the interaction inside the cabin, but
also affects the driver's observation of the outside
environment. In the future, there are many other AR
technologies that can be applied, and other interaction
methods can also be integrated into it. There is great
room for improvement in this system.
4 CONCLUSIONS
This study discussed how to enhance the
environmental perception and cabin experience of
intelligent vehicles. From the perspective of multi-
modal interaction, the research analyzed various
interaction methods such as visual image interaction,
touch interaction, and voice interaction to improve
the safety, practicality, and comfort of intelligent
vehicles. At the same time, the study found the
limitations of the single mode interaction mode, as
well as the functional conflicts and miscellaneous
problems caused by the rigid combination of multi-
modal interaction. To address these pain points, this
article introduced the application of augmented
reality technology in smart cars and concluded that a
closed-loop interaction of "human-vehicle-
environment" can be achieved by creating an AR in
car system that integrates multi-modal interaction,
achieving the goal of comprehensively enhancing the
perception of intelligent car environment and cabin
experience while ensuring safety. These findings
highlight the growing importance of integrating
emerging technologies to optimize human-vehicle
interaction. In the broader context of intelligent
transportation systems, future work should continue
to explore innovative approaches that bridge
technology and user needs, driving the evolution of
safer, more intuitive, and more immersive mobility
experiences.
REFERENCES
Baek, H. J., Lee, H. B., Kim, J. S., Choi, J. M., Kim, K. K.,
& Park, K. S. (2009). Nonintrusive biological signal
monitoring in a car to evaluate a driver's stress and
health state. Telemedicine and e-Health, 15(2), 182–
189.
Breitschaft, S. J., Clarke, S., & Carbon, C.-C. (2019). A
theoretical framework of haptic processing in
automotive user interfaces and its implications on
design and engineering. Frontiers in Psychology, 10,
1470.
David, O., Kopeika, N. S., & Weizer, B. (2006). Range
gated active night vision system for automobiles.
Applied Optics, 45(28), 7248–7254.
Gao, F., Ge, X., Li, J., Fan, Y., Li, Y., & Zhao, R. (2024).
Intelligent cockpits for connected vehicles: Taxonomy,
architecture, interaction technologies, and future
directions. Sensors, 24(16), 5172.
Guerrero-Ibáñez, J., Zeadally, S., & Contreras-Castillo, J.
(2018). Sensor technologies for intelligent
transportation systems. Sensors, 18(4), 1212.
Mehler, B., Kidd, D., Reimer, B., Reagan, I., Dobres, J., &
McCartt, A. (2016). Multi-modal assessment of on-road
demand of voice and manual phone calling and voice
navigation entry across two embedded vehicle systems.
Ergonomics, 59(3), 344–367.
Strayer, D. L., Cooper, J. M., Goethe, R. M., McCarty, M.
M., Getty, D. J., & Biondi, F. (2019). Assessing the
visual and cognitive demands of in-vehicle information
systems. Cognitive Research: Principles and
Implications, 4(1), 18.
Strayer, D. L., Cooper, J. M., Turrill, J., Coleman, J. R., &
Hopman, R. J. (2016). Talking to your car can drive you
to distraction. Cognitive Research: Principles and
Implications, 1(1), 16.
Xu, X., Wu, Z., & Zhao, Y. (2024). An improved
longitudinal driving car-following system considering
the safe time domain strategy. Sensors, 24(16), 5202.
Zhang, Y., Guo, L., You, X., Miao, B., & Li, Y. (2024).
Cognitive response of underground car driver observed
by brain EEG signals. Sensors, 24(23), 7763.
Zhao, D. (2022). Application of neural network based on
visual recognition in color perception analysis of
intelligent vehicle HMI interactive interface under user
experience. Computational Intelligence and
Neuroscience, 2022, 3929110.
Zhou, Y., Fu, R., Wang, C., & Zhang, R. (2020). Modeling
car-following behaviors and driving styles with
generative adversarial imitation learning. Sensors,
20(18), 5034.
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
364
