
Analysis of Research Status of AI Enabled Intelligent Terminal
Implementation and User Intention Interaction
Haiyang Xu
College of Computer Science and Technology, Taiyuan University of Science and Technology, Taiyuan, China
Keywords: Intentional Interaction, Multimodal Fusion, Proactive Services, End-Cloud Collaboration, Privacy Protection.
Abstract: Intention interaction technology enables intelligent terminals to understand users' intentions more naturally
and provide a more humanized interaction experience. Therefore, this paper systematically analyzes the
application of AI-enabled intentional interaction technology in intelligent terminals, and proposes an
interaction framework centered on the Intentional Understanding Interface (KUI), which covers the three
major technology chains of multimodal input and output, semantic in-depth parsing, and end-cloud
collaborative service reach. By analyzing some business cases and literature in related industries, the core
logic of the smart terminal active service model from data collection, multimodal fusion to intent
understanding as well as solving user data security issues under the intent interaction framework, is elaborated.
This paper concluded that the current technology faces challenges such as fuzzy semantic dynamic parsing,
multimodal spatio-temporal mismatch and arithmetic-energy balance, and summarize feasible solutions and
optimization paths for the problems of fuzzy semantic understanding and data privacy. This paper provides
theoretical support and practical guidance for building a zero-friction and highly trustworthy intentional
interaction ecology.
1 INTRODUCTION
Human-Computer Interaction (HCI) is an
interdisciplinary field that studies the exchange of
information and collaboration between humans and
computer systems, with the core goal of designing
efficient, natural, and secure interactions to optimize
user experience (UX) and system performance.
Currently, a fourth-generation interaction paradigm
centered on knowledge-driven - the Intent
Understanding Interface (KUI) - is taking shape. Its
essence is that the machine actively understands
human intentions, thus realizing a personalized and
highly responsive service experience. AI technology
enables smart terminals to actively sense fragmented
user behavior, such as text dragging and dropping and
cross-application operations, through semantic deep
parsing, multimodal intent modeling, and end-cloud
collaborative decision-making, and to build human-
centric Intent Graphs, which are directly mapped to
the service ecosystem. This shift not only improves
interaction efficiency but also redefines the
boundaries of personalized services.
The core of Intentional Interaction lies in the
construction of a user's digital twin, which
continuously collects behavioral data through end-
side sensors and combines it with cloud-based
knowledge graphs to predict potential demand.
Traditional human-computer interaction paradigms
all belong to responsive interaction, with real-time
feedback as the core, the system responds quickly by
sensing user inputs, such as clicks, voice, gestures,
etc., emphasizing the immediacy of operation and
feedback, and relying on the user's active inputs for
passive triggering. With the development of
technology to achieve high precision and quality of
data collection and perception, the development of AI
prediction models and the improvement of real-time
computing power can actively understand the user's
intention and predict the user's needs, and then
provide services or adjust the function of the new
interaction paradigm came into being to provide users
with the intelligent experience of “responding before
operating”.
Currently, intent interaction technology has been
commercialized in some smart terminals. For
example, Honor MagicOS 8. 0, through the “Any
Door” architecture, resolves user drag-and-drop
behavior into some kind of intent in real time, and
accurately realizes API calls; Huawei Smart Search
102
Xu, H.
Analysis of Research Status of AI Enabled Intelligent Terminal Implementation and User Intention Interaction.
DOI: 10.5220/0014321700004718
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2025), pages 102-108
ISBN: 978-989-758-792-4
Proceedings Copyright © 2026 by SCITEPRESS – Science and Technology Publications, Lda.

integrates multiple sources of data such as calendars
and locations, and predicts users' scenario needs. In
terms of related technologies, Baidu's industry-level
knowledge enhancement model “ERNIE”, in which
the cross-modal generation model ERNIE-ViLG for
the first time based on autoregressive algorithms will
be the unified modeling of image generation and text
generation, to enhance the model's cross-modal
semantic alignment capabilities, significantly
improve the effect of graphic and text generation(Yu,
2020). Google's team put forward a multitasking The
Google team proposes a multi-task knowledge
enhancement model to support the realization of
cross-application recommendation system for
automatic service invocation and so on(Xie, 2022).
However, existing systems still have limitations in
fuzzy semantic processing and cross-modal intent
alignment, such as the simultaneous parsing of screen
focus for the voice command “save this”.
The purpose of this paper is to provide theoretical
references for constructing zero-friction interaction
experience of intelligent terminals. By systematically
analyzing the research results and journal papers on
intentional interaction from multimodal perception,
semantic understanding to service reach, papers
evaluate the bottleneck challenges of the existing
technologies and recommend possible and feasible
improvement directions.
2 FRAMEWORK AND KEY
ASPECTS
Figure 1: Hierarchical Diagram of Intentional Interaction (Photo credit : Original )
2.1 Intentional Framing and Cognitive
Modeling of Screen Comprehension
The intent framework needs to build a three-layer
structure: a data-aware layer, an intent inference layer
and a service execution layer(Figure 1). The whole
process realizes end-cloud collaborative service reach,
after multimodal sensing and data acquisition and
input, successively or jointly spatio-temporal
alignment attention mechanism and cross-modal
attention mechanism for spatio-temporal alignment
and local semantic fusion, then uploaded to cloud
servers for gradient aggregation and query related
knowledge to construct cloud knowledge graph, after
neural network model inference to generate semantic
graph to transfer cloud knowledge back to the local
area, and then carry out Local reasoning provides
users with personalized service execution and
multimodal output. Taking “address sharing” in
WeChat as an example, the system needs to recognize
the “location” card on the screen and extract its
latitude and longitude information; at the same time,
combined with contextual statements such as “Meet
me tomorrow at 3pm! At the same time, the system
needs to recognize the user's scheduling intention and
automatically generate calendar reminders by
combining contextual statements such as “Meet me
tomorrow at 3pm”. The process embodies a complete
closed loop of three layers: data sensing, intent
reasoning and service execution. Microsoft's
Semantic Kernel framework reduces service
orchestration complexity through declarative
programming by breaking down a user goal such as
“book a meeting room” into tasks such as querying
availability, sending invitations, etc. for atomic
operations(Lee, 2023).
2.2 Multimodal Input-Output Fusion
Paradigms
Multimodal interaction needs to address spatio-
temporal alignment and semantic complementarity.
Take “screen understanding + voice command”
scenario as an example: the user points to a certain
area on the map and says “nearby Sichuan restaurant”,
the system needs to locate the area through target
detection, combine with named entity recognition
(NER) to extract cuisine preferences, and finally call
Analysis of Research Status of AI Enabled Intelligent Terminal Implementation and User Intention Interaction
103

the LBS service and At the same time, combining
haptic feedback such as Apple Taptic Engine with
voice reminders for multimodal output can enhance
interaction confidence: when the user drags and drops
the content to the “any door”, the vibration feedback
confirms that the intent was captured successfully.
where the spatio-temporal alignment problem can
be solved by the spatio-temporal alignment attention
mechanism. That is, a cross-modal temporal encoder
is constructed to compute the time offsets of speech
and touch events and dynamically adjust the intent
fusion weights(Tsai, 2019). Alternatively, Dynamic
Time Warping (DTW) is used when solving only the
multimodal timing asynchrony problem caused by
timing signals of different modes that may be out of
sync with the time axis due to acquisition frequency
or physical delays, which is essentially to find the
optimal nonlinear alignment paths between the two
timing sequences and minimize the cumulative
distance. Given two timing sequences X=[x1,. . . ,xN]
and Y=[y1,. . . ,yM], the distance matrix is computed
for each pair of points (xi,yj) with distance d(i,j), and
then the cumulative distance matrix D is computed by
recursion: D(i,j)=d(i,j)+min(D(i-1,j),D(i,j-1),D(i-1,j -
1)), and then from backtracking from D(N,M), find
the least costly alignment path(Sakoe, 1971).
For the semantic complementarity problem, the
early mature techniques include Co-Training and Tri-
Training, where Co-Training refers to two modal
classifiers providing pseudo-labels to each other , and
Tri-Training refers to the introduction of a third
modality as an arbiter , but Multimodal Co-Training
is essentially an improvement of the collaboration
between multiple unimodal models to accomplish a
task, which always remains at a shallow
understanding of semantics, and reasoning based on
subtle associations that are difficult to capture, such
as “rapid speech + frowning = anger”, is not possible.
This greatly hinders accurate prediction of user needs
at the level of intent understanding. Cross-modal
learning, on the other hand, is the mapping of data
from different modalities into the same embedding
space for mutual transformation and mapping, where
one modality extracts information and uses it to
understand or enhance the content of another
modality. It really realizes from “collaboration” to
“integration” between modalities, and realizes the
deep understanding of user semantics. CLIP is the
very classic cross-modal learning approach. CLIP
aligns the image and text representations by means of
the Contrastive Learning algorithm, using a dual-
stream architecture, i. e. , separate architectures for
the different modal encoders. After receiving a batch
of image-text pairs {(I1,T1),(I2,T2),. . . ,(IN,TN)},
where N is the batch size, the image encoder extracts
image features to output image feature vectors, and
the text encoder extracts text features to output text
feature vectors ,and then compares the loss functions
to maximize the similarity of the matched image-text
pairs and minimize the similarity of the mismatched
pairs(Radford, 2021). Another kind of ViLBERT
model that utilizes the Cross-modal Attention
mechanism also improves the intention recognition
accuracy by 15% (Lu, 2019). If a modal conflict is
detected, counterfactual reasoning can be initiated in
conjunction with causal reasoning interventions to
pursue the user's true intentions (Pearl, 2009).
Although cross-modal learning technology is not yet
mature enough, with the development of the
intentional interaction paradigm making a deeper
understanding of the user's intent by the machine an
inevitable requirement, cross-modal learning will
become an important breakthrough direction, and it
will be the technology that the public can expect to
achieve early and widespread commercialization of
the landing.
2.3 Privacy Protection for the Whole
Process of Intent Recognition
In a hypothetical scenario, when a user intercepts
multiple “diabetes diet” articles in a row, the system
triggers a customized recipe recommendation from a
health management app (Devlin et al. , 2018). This
process relies on Federated Learning for privacy
protection, where the raw data is kept locally,
processed by the end-side device, and only uploaded
with model gradient updates (McMahan et al. , 2017)
to the central server. FedAvg algorithm as an example
of a typical federated learning process, the central
server releases the global model 𝑚
selected part of
the client to download , each client with local number
of each client with local data training, to get the local
model𝜽
parameters Clients uploaded to the server
server weighted average, for example, according to
the amount of data to update the global model:
𝜃
=
∑
|
|
∑|
|
𝜃
(1)
Repeat steps 2-3 until the model converges(Mcmahan,
2016).
Of course FL is always being continuously
improved and refined by adding additional techniques
such as knowledge distillation and model
compression techniques, giving birth to models that
move into the target domain and learn in the source
domain, federated transfer learning and personalized
federated learning. Among them, personalized
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
104
federated learning solves the problem that global
models in federated learning are difficult to adapt to
the specific needs of each client by introducing a
personalization layer or a personalization model, and
further enhances personalized service attributes while
realizing end-cloud collaborative service reach in
intentional interactions. Although FL does not share
raw data, uploaded model parameters may still
expose privacy information through reverse attacks.
Differential privacy, on the other hand, as a
complementary technique to federated learning, is
often used in conjunction with it to enhance privacy
protection by adding noise to the end-side uploading
process to the cloud, ensuring that an attacker is
unable to backtrack from the output to determine
whether individual samples participated in the
training to get the original data, thus bridging the
privacy vulnerability of FL. Differential privacy, i. e. ,
the introduction of noise, can be applied to multiple
parts of federated learning, adding noise to the
gradient or parameter for client-level DP after the
user's end-side portion is locally trained, and adding
noise to the server when the server aggregates the
client's parameter. or combining the client- and
server-level DPs to control the privacy budget in a
hierarchical way, e. g. , by adding a small amount of
noise to the client, and the server adding further noise,
which guarantees strong privacy while reducing the
dependence on the central server. Of course federal
learning is not a completely irreplaceable privacy
protection measure and can be replaced by other
programs or used simultaneously. In multi-party
collaboration scenarios, especially in financial and
medical fields where privacy requirements are
extremely high, multi-party secure computing, which
allows multiple participants to jointly participate in
the computation of a target task while ensuring that
each party only obtains its own computation results
without collusion among the participants, and is
unable to infer the input data of any of the other
parties through the interaction data in the process of
computation, might be a more preferable option.
Replacing communication with servers with peer-to-
peer communication between individual clients in
decentralized scenarios such as blockchain
applications, distributed IoT, etc. , and peer-to-peer
distributed learning where the communication
topology is represented by a connectivity graph is yet
another option. Alternatively, homomorphic
encryption can be considered when direct
computation of encrypted data is required, such as in
cloud computing and data outsourcing.
3 CHALLENGES AND
RESPONSES
Although the intent-driven interaction paradigm
shows great potential, its implementation is still
limited by core issues such as ambiguous semantic
understanding and data privacy.
3.1 Dynamic Parsing Dilemma for
Fuzzy Semantics
Current systems rely on static knowledge bases for
intent reduction of unstructured instructions, making
it difficult to fuse user profiles with environmental
parameters in real time. Perhaps incremental
knowledge injection can be used to associate
historical user behavior with domain ontology
through dynamic knowledge graphs to achieve
context-aware semantic disambiguation (Zhang et al. ,
2023). Uncertainty modeling is also performed to
quantify intent confidence using a Bayesian inference
framework, which triggers a clarification
conversation when the confidence level is below a
threshold to avoid false service triggers (Wang &
Singh, 2022).
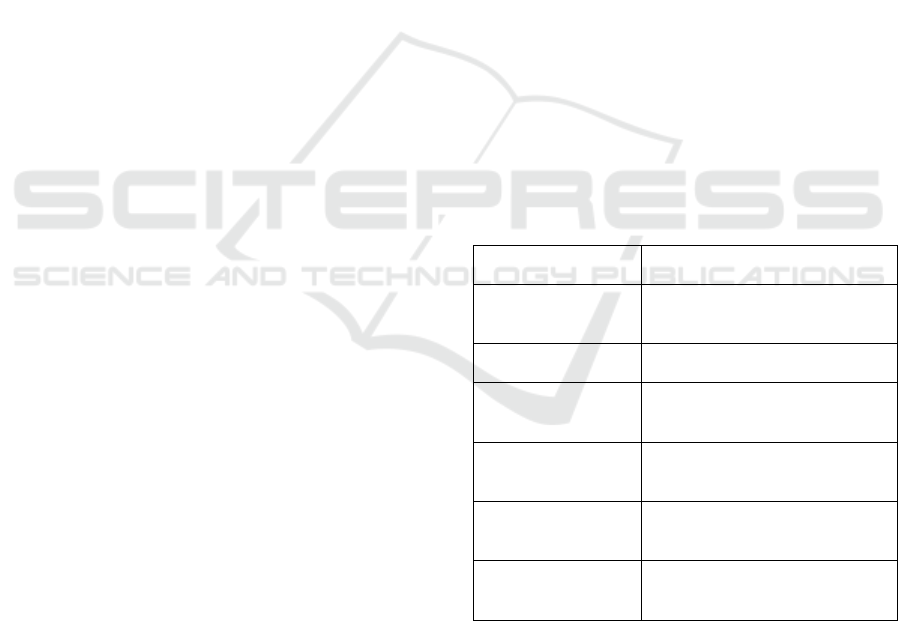
Table 1: Required dimensions for accurate parsing of
unstructured instructions by the system
Anal
y
sis dimension Exam
p
les/Instructions
Unstructured
instruction
“Find a place to take mom and
dad for dinner. ”
User profile Age of parents, dietary taboos
Environmental
p
arameters
Weather of the day
Historical User
Behavio
r
Past Restaurant Ratings
Domain proper Catering Industry Classification
Standar
d
Clarification of the
dialogue
“Do you need to prioritize
accessibility?”
Or simultaneously with causal reasoning
interventions for joint decision making and
combining cross-modal inputs and outputs for
advanced interconnections(Table 1 and Table 2).
Analysis of Research Status of AI Enabled Intelligent Terminal Implementation and User Intention Interaction
105
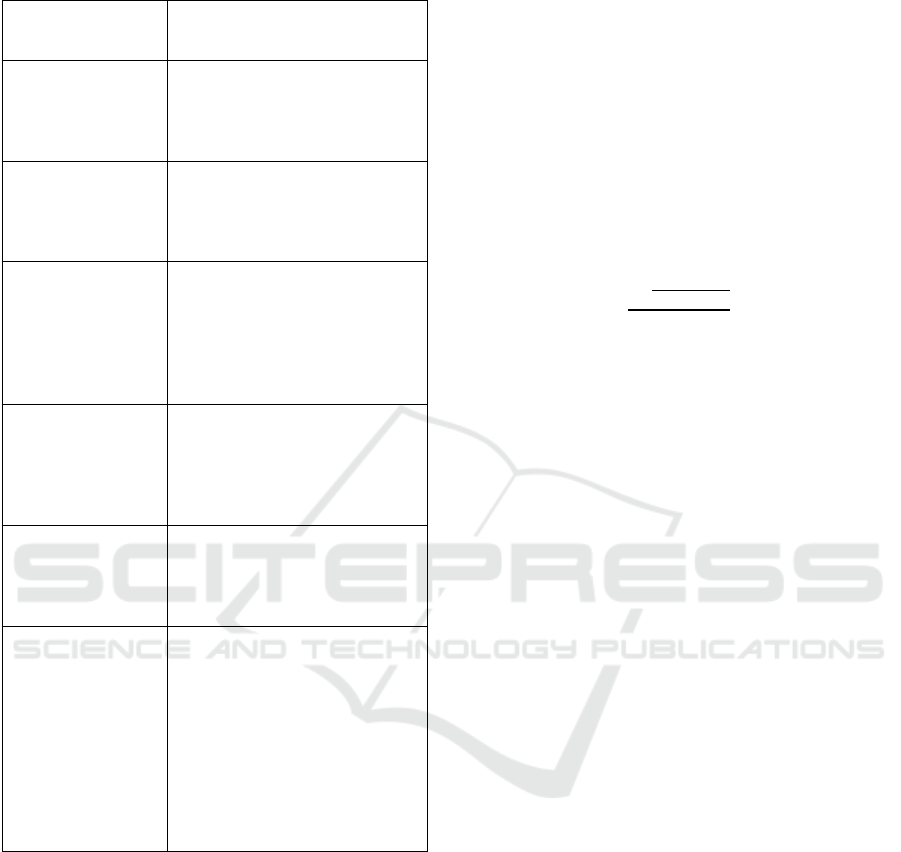
Table 2: The process of responding to instructions using
joint decision making with confidence + causal reasoning
Command
Res
p
onse Ste
p
s
Examples/Instructions
Cross-modal initial
command
The user's cell phone screen stays
on the smart air conditioner
temperature control interface and
sa
y
s, “It's too hot. ”
Cause-and-effect
speculation
The model determines the
effectiveness of “adjusting the air
conditioner” behavior on the goal
of “makin
g
users feel cooler”.
Causal Reasoning +
Knowledge Graph
Correlating a user's recent
presence of cold medicine
purchasing records, the state's
recent energy restriction
strategies with air conditioning
tem
p
erature re
g
ulation
Confidence testing Based on the constructed
dynamic knowledge graph, the
model has only 62% confidence
in the intention to “turn up the air
conditionin
g
”.
Counterfactual
inference
Modeling “How much user
satisfaction will increase if we
ignore power saving mode and
user's
p
h
y
sical health”
Joint response “It is currently in power saving
mode and has detected that you
may have cold symptoms in the
near future, if you temporarily
turn up the temperature by 2°C
you can improve your physical
comfort, but it will increase your
energy consumption by 10% and
increase the risk of catching a
cold. Are
y
ou sure?”
However, it is not certain whether the method of
repeated conversations to confirm user needs will
cause user dissatisfaction with the personalized
service of this AI and affect user satisfaction.
3.2 Fragmented Data Integration and
the Privacy Paradox
User data is dispersed across end-side, edge nodes
and cloud, e. g. , local photo albums on the end-side,
home routers on the edge nodes and social platforms
in the cloud. Cross-domain data fusion faces privacy
compliance risks. There are numerous breakthrough
directions, and the more mainstream approaches
involve differential privacy as mentioned in this paper,
but injecting noisy data into the end-side preprocessor
will inevitably cause some damage to model
performance and reduce model accuracy. There are
numerous breakthrough directions, and the more
mainstream approaches involve differential privacy
as mentioned in this paper, but injecting noisy data
into the end-side preprocessor will inevitably cause
some damage to model performance and reduce
model accuracy(Miao, 2024). The relationship
between the Gaussian noise scale σ and the privacy
budget ε is computed from the standard deviation σ
of the noise in the Gaussian mechanism by the
equation:
σ=
∆
./
(2)
It can be seen that the smaller ε is the stronger the
privacy, but the greater the noise(Lebensold, 2024).
The current relatively reliable optimization scheme is
to implement differential privacy in the trusted
execution environment (TEE+DP), where the critical
operations are completed within the trusted execution
environment to isolate malicious attacks. The
hardware isolation of TEE reduces the ε-value
requirement of DP while guaranteeing the same
privacy, which safeguards the accuracy of the model
to some extent. However, the performance cost of
introducing noise once used is unavoidable regardless,
although it will be further minimized in the future
with the development of anti-noise training
algorithms and hardware acceleration.
3.3 Conflicting Privacy and Accuracy
Issues in End-Cloud Collaboration
While the pure cloud-based large models show more
significant open-domain complex reasoning
capabilities with few-shot capabilities in, for example,
intention understanding tasks that require trillion-
token knowledge bases like comparative
philosophical concepts or in the face of completely
untrained classes of intentions like novel web
terms(Hoffmann, 2022)(Schick, 2020). However, the
end-side equipment for the initial processing of data
to complete the data localization, to ensure that the
user's original data does not leave the local and thus
protect the user's privacy and security, and at the same
time, the end-side model according to the user's needs
can be continuously personalized model optimization,
to enhance the adaptability of the model to the needs
of the local user, or to achieve the linkage of multiple
intelligent terminals to create an intelligent ecosystem,
to provide users with different scenarios of
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
106
customized services. It proves that all-cloud services
are no longer in line with the development trend of
human-computer interaction in people's general daily
life scenarios. Moreover, setting up test scenarios to
compare the completion of tasks between high-
quality end-cloud collaboration solutions and pure
end-cloud large models shows that the high-quality
end-cloud collaboration solutions have basically
leveled off with the pure cloud in ordinary
scenarios(Table 3).
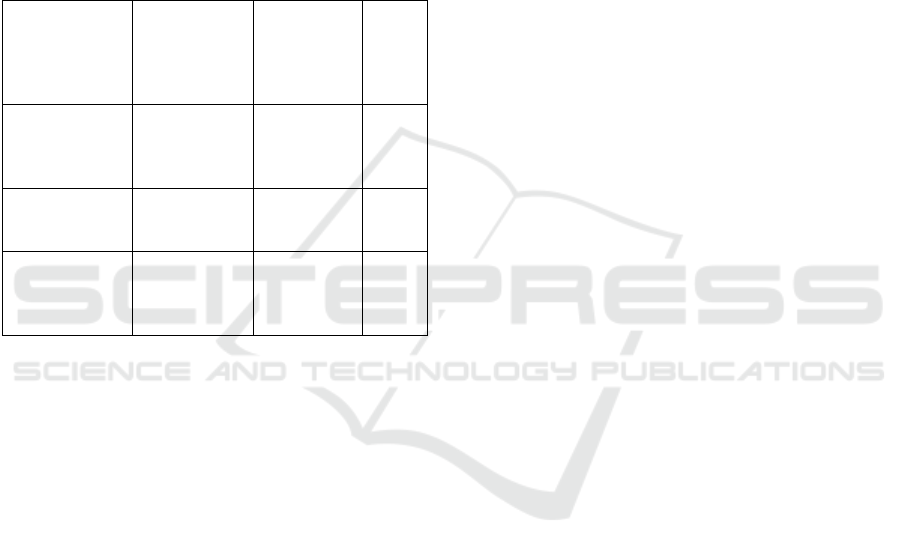
Table 3:Comparison of quality end-cloud collaboration
solutions with pure end-cloud large model task completion
in selected test scenarios
test scenario Only cloud-
based
macromodeli
ng
(Accuracy)
End-to-End
Cloud
Collaborati
on Program
(Accuracy)
gaps
Image
classification
tasks(Yan,
2024
)
78. 2% 89. 6% +11.
4%
Image Target
Detection(Wa
n
g
, 2023
)
82. 1% 87. 3% +5.
2%
Video Target
Detection(Cao
, 2025)
98. 12% 97. 26%-
97. 96%
-0.
16%~
-0.
86%
Then continuously optimizing the end-side local
lightweight model, improving the end-side device's
arithmetic power, perfecting the end-cloud
collaboration framework and designing a better end-
cloud collaboration solution is the better solution.
4 CONCLUSION
This paper clarifies three core features of AI-enabled
intentional interaction architecture through
technology chain decoupling and case empirical
evidence. These features mainly include: human-
centered intent modeling, cognitive coupling of
multimodal intent, and balanced design of privacy-
integration capabilities. Despite the significant
progress in intentional interaction technology, the
current system still relies on rough probabilistic
models for reasoning about users' implicit needs (e.
g. , emotion-driven irrational decision-making), and
needs to combine with cognitive psychology theories
to build a fine-grained intent classification system;
cross-device intent migration (e. g. , from cell phones
to smart homes) faces the problem of fragmented
protocols, and urgently needs to establish a unified
intent description language. However, people can still
foresee that intentional interaction technology will
reshape the pattern of the intelligent terminal industry,
and future research needs to unite the strength of
human-computer interaction, jurisprudence,
sociology and other multidisciplinary forces to build
a “technology-ethics-commercial” trinity of
intentional interaction evolution paradigm.
REFERENCES
Cao, Z., et al., 2025. Edge-Cloud Collaborated Object
Detection via Bandwidth Adaptive Difficult-Case
Discriminator. IEEE Transactions on Mobile
Computing, 24(2), 1181–1196.
DOI:10.1109/TMC.2024.3474743
Hoffmann, J., Borgeaud, S., Mensch, A., et al., 2022.
Training Compute-Optimal Large Language Models.
DOI:10.48550/arXiv.2203.15556
Lebensold, J., Precup, D., Balle, B., 2024. On the Privacy
of Selection Mechanisms with Gaussian Noise.
Lee-Stott, 2023. Unlock the Potential of AI in Your Apps
with Semantic Kernel: A Lightweight SDK for LLMs.
Microsoft Educator Developer Blog, Retrieved on May
14,2025.Educator Developer Blog. Retrieved from
techcommunity.microsoft.com.
Lu, J., Batra, D., Parikh, D., et al., 2019. ViLBERT:
Pretraining Task-Agnostic Visiolinguistic
Representations for Vision-and-Language Tasks.
DOI:10.48550/arXiv.1908.02265
McMahan, H.B., Moore, E., Ramage, D., et al., 2016.
Communication-Efficient Learning of Deep Networks
from Decentralized Data.
DOI:10.48550/arXiv.1602.05629
Miao, Y., Xie, R., Li, X., et al., 2024. Efficient and Secure
Federated Learning Against Backdoor Attacks. IEEE
Trans. on Dependable and Secure Computing (T-DSC),
21(5), 18. DOI:10.1109/TDSC.2024.3354736
Moore, R., Lopes, J., 1999. Paper templates. In
TEMPLATE’06, 1st International Conference on
Template Production. SCITEPRESS.
Pearl, J., 2009. Causality: Models, Reasoning, and
Inference. Cambridge University Press.Hitchcock,
Pearl.Causality: Models, Reasoning and
Inference.[2025-05-14].
Radford, A., Kim, J.W., Hallacy, C., et al., 2021. Learning
Transferable Visual Models From Natural Language
Supervision. DOI:10.48550/arXiv.2103.00020
Sakoe, H., Chiba, S., 1971. A Dynamic Programming
Approach to Continuous Speech Recognition. In
Proceedings of the Seventh International Congress on
Acoustics, Budapest. DOI:http://dx.doi.org/
Schick, T., Schütze, H., 2020. It's Not Just Size That
Matters: Small Language Models Are Also Few-Shot
Learners. DOI:10.48550/arXiv.2009.07118
Analysis of Research Status of AI Enabled Intelligent Terminal Implementation and User Intention Interaction
107

Smith, J., 1998. The book. The publishing company,
London, 2nd edition.
Tsai, Y.H.H., Bai, S., Liang, P.P., et al., 2019. Multimodal
Transformer for Unaligned Multimodal Language
Sequences. DOI:10.18653/v1/P19-1656
Wang, Z., Ko, I.-Y., 2023. Edge-Cloud Collaboration
Architecture for Efficient Web-Based Cognitive
Services. In 2023 IEEE International Conference on
Big Data and Smart Computing (BigComp), Jeju,
Korea, Republic of, pp. 124–131.
DOI:10.1109/BigComp57234.2023.00028
Xie, T., Wu, C.H., Shi, P., et al., 2022. UnifiedSKG:
Unifying and Multi-Tasking Structured Knowledge
Grounding with Text-to-Text Language Models. arXiv
e-prints. DOI:10.48550/arXiv.2201.05966
Yan, Z., Zheng, Z., Shao, Y., Li, B., Wu, F., Chen, G., 2024.
Nebula: An Edge-Cloud Collaborative Learning
Framework for Dynamic Edge Environments. In The
53rd International Conference on Parallel Processing
(ICPP '24), Gotland, Sweden. ACM, New York, NY,
USA. DOI:10.1145/3673038.3673120
Yu, F., Tang, J., Yin, W., et al., 2020. ERNIE-ViL:
Knowledge Enhanced Vision-Language
Representations Through Scene Graph.
DOI:10.48550/arXiv.2006.16934
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
108
