
Applications of Computer Vision and Human—Machine Interaction
in Environmental Monitoring
Bocheng Zhu
School of Software, Henan University, Kaifeng, China
Keywords: Edge Cloud Collaborative Architecture, Environmental Monitoring System, Artificial Intelligence.
Abstract: With the development of artificial intelligence, the integration of computer vision and human-computer
interaction is completely changing the paradigm of environmental monitoring technology. Traditional
environmental monitoring systems rely on decentralized sensor networks to transmit data back to a central
server, which limits real-time performance and decision-making efficiency. This study developed an
intelligent environmental monitoring system based on edge cloud collaborative architecture, multimodal data
fusion, and holographic imaging technology. Lightweight edge computing nodes are deployed at the sensor
end to perform local data preprocessing, reduce the cloud transmission load by 80%, and control the end-to-
end delay within 20ms. Cloud utilizes artificial intelligence algorithms to integrate structured and unstructured
data, generating high-precision environmental state models. Dynamic holographic images are formed through
light field projection and support gesture-based interaction to accurately locate problem areas. Finally, the
challenges and advantages of the technology were analyzed. In the future, with the help of algorithm
lightweighting, hardware innovation, and policy support, the system is expected to expand to scenarios such
as automated agriculture and urban flood warning, achieving large-scale application of ecological protection.
1 INTRODUCTION
Environmental disasters such as climate change,
forest fires, and water pollution occur frequently,
posing a serious threat to ecological balance and
human health. Traditional environmental monitoring
methods mainly rely on a distributed sensor network.
The collected data is transmitted to a central server
for processing and analysis via wired or wireless
means (Han, 2024). However, this model has
significant shortcomings in terms of real-time
performance, interaction efficiency, and data
visualization. For example, in remote areas or areas
with poor network coverage, data transmission delays
can be as long as several minutes or even hours,
severely restricting the timeliness of environmental
monitoring. In addition, traditional systems usually
rely on command - line interfaces or 2D charts to
present data, lacking intuitive spatial correlations,
making it difficult for non - technical personnel to
quickly understand and respond to environmental
changes.
The rapid development of computer vision and
human- machine interaction technologies provides
new possibilities for solving these problems. In recent
years, computer vision technology has made
remarkable progress in fields such as object detection,
image classification, and anomaly recognition. Deep
- learning models (such as ResNet, YOLO, etc.) have
achieved an accuracy rate of over 90% in
environmental monitoring tasks. At the same time,
human - machine interaction technology has evolved
from early keyboard input to current gesture
recognition, voice control, and holographic projection,
greatly improving the interaction efficiency between
users and machines. These technological
advancements have laid a solid foundation for
building a low -latency, high-precision intelligent
environmental monitoring system.
Currently, research in the field of environmental
monitoring mainly focuses on three aspects: sensor
network optimization, data fusion algorithms, and
visualization techniques.
In terms of sensor network optimization, the
introduction of edge computing technology has
significantly improved data processing efficiency.
For example, lightweight edge devices such as
NVIDIA Jetson can perform local data pre-
processing (such as noise reduction, compression),
reducing dependence on cloud resources, thereby
Zhu, B.
Applications of Computer Vision and Human—Machine Interaction in Environmental Monitoring.
DOI: 10.5220/0014320300004718
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2025), pages 61-65
ISBN: 978-989-758-792-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
61
reducing transmission delays and bandwidth
requirements. However, existing systems still have
deficiencies in multi-sensor collaboration and data
synchronization. Especially in dynamic environments,
differences in sampling frequencies and accuracies of
different sensors may lead to data fusion deviations
(Just Go for It Now, 2024).
In terms of data fusion algorithms, multi-modal
data fusion technology has become a research hotspot.
By combining structured data (such as temperature,
humidity) and unstructured data (such as images,
videos), AI algorithms can analyze the environmental
state more comprehensively. For example, a deep -
learning - based smoke detection model can
accurately identify the early signs of forest fires, and
spatio-temporal alignment technology can solve the
problem of time asynchrony of multi-source data.
Nevertheless, how to achieve real-time and precise
data fusion in highly dynamic environments remains
an urgent challenge to be addressed.
In terms of visualization techniques, traditional
2D charts and tables can no longer meet the
requirements for presenting complex environmental
data. In recent years, the rise of holographic
projection technology has provided a new means of
visualization for environmental monitoring (Chen,
2024). Through light-field projection and dynamic
particle effects, holographic images can intuitively
display the spatial distribution and change trends of
environmental parameters. However, issues such as
holographic interaction accuracy and tactile feedback
still need to be further optimized, for example, by
combining visual Simultaneous Localization and
Mapping (SLAM) technology to improve the
accuracy of gesture recognition (The Innovation
Geoscience Editorial Department, 2024).
The significance of this research lies in
constructing a new intelligent environmental
monitoring system by integrating edge computing,
multi-modal data fusion, and holographic imaging
technology. This system can not only significantly
reduce data transmission delays and improve the real-
time performance of monitoring, but also enhance the
user experience through an intuitive holographic
interaction interface, providing non-professional
personnel with an efficient tool for environmental
data analysis. In addition, the application scope of this
system is extensive, covering multiple scenarios such
as forest fire early warning, water pollution
monitoring, and urban flood prevention and control,
providing scientific and intelligent technical support
for ecological protection and disaster prevention and
control.
2 TECHNICAL METHODS AND
THEORIES
In the intelligent environmental monitoring system,
the key technical process mainly consists of several
core links: data collection, transmission, processing,
and presentation.
First is data collection. In different monitoring
scenarios (such as forests, water areas, cities, etc.),
various types of sensors are deployed, such as
temperature sensors, smoke sensors, chemical
substance sensors, etc. Each sensor performs its own
function and captures various signals in the
environment in real-time. The collected data is
transmitted to the lightweight edge computing node
at the sensor end, such as NVIDIA Jetson, via wired
or wireless means.
The edge computing node will perform
preliminary processing on the data, including data
filtering, noise reduction, anomaly detection, etc. By
processing the data locally, the amount of data is
greatly reduced. Then, the key data is uploaded to the
cloud via the network.
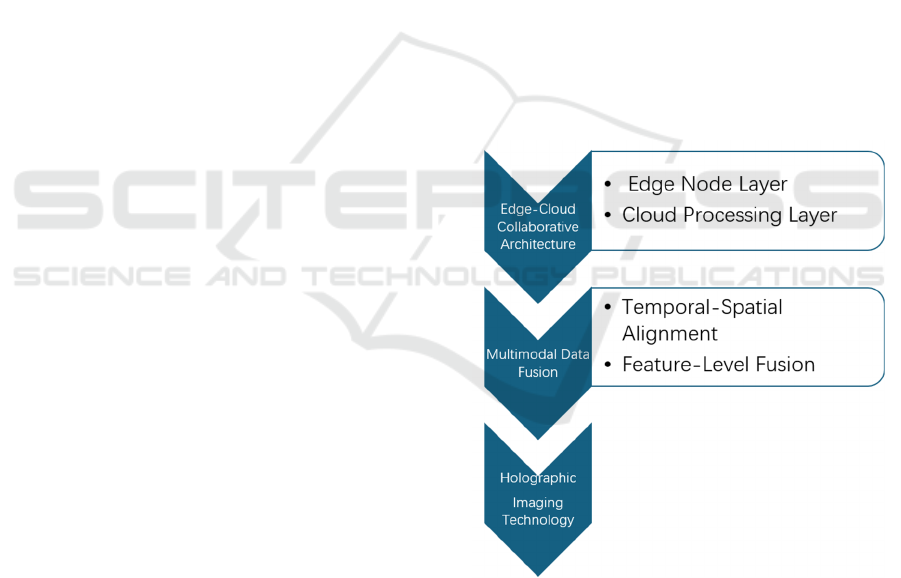
Figure 1. Technical Framework Diagram (Picture credit:
Original).
In the cloud, AI algorithms (such as ResNet,
spatio-temporal alignment technology) are used to
fuse and analyse the received structured data
(temperature, humidity, etc.) and unstructured data
(smoke images, video streams, etc.), generating a
high-precision environmental state model.
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
62

Finally, with the help of light-field projection
technology, multi-dimensional data is mapped into
dynamic holographic images and presented to the
user end. Inspectors can view and analyse
environmental information intuitively through
gesture interactions (zooming, rotating, etc.),
completing the entire monitoring process and
achieving efficient environmental monitoring. Figure
1 shows the technical framework.
3 MAIN CONTENT
3.1 Applications of Computer Vision
Technology in the Environment
For example, in forest fire detection, temperature and
smoke sensors are installed on trees for fire
prevention. In water pollution identification,
chemical substance sensors in the water are used to
detect the degree of water source pollution. In climate
prediction, humidity and light sensors are deployed in
the soil and grass to predict future climate changes.
Multiple monitoring points are set up in simulated
forest environments and actual forest areas, with
temperature sensors, smoke sensors, and cameras
collecting image data (The Innovation Geoscience
Editorial Department, 2023). The system is used for
fire detection, and experimental results are collected.
Under different weather conditions (sunny, cloudy,
light rainy) and terrain environments (mountainous
areas, plains), it is verified whether the system's
detection accuracy for forest fires can exceed 90% to
ensure accuracy. In addition, when a fire occurs, it is
verified whether the system can respond quickly
within 20ms and issue an alarm in a timely manner,
which buys precious time for firefighting.
3.2 Key Technical Analysis
3.2.1 Edge-Cloud Collaborative
Architecture
Lightweight edge computing nodes (such as NVIDIA
Jetson) are deployed at the sensor end to perform
preliminary data filtering and compression, reducing
the demand for transmission bandwidth. 80% of the
original data (such as image noise reduction, anomaly
detection) is processed locally, and only the key data
is uploaded to the cloud, reducing the latency to
within 20ms. The edge computing node plays a
crucial role in connecting the upper and lower parts
of the entire system. Taking NVIDIA Jetson as an
example, it is equipped with a powerful processor and
a dedicated graphics processing unit (GPU), with
excellent parallel computing capabilities, enabling it
to efficiently process various types of data. In the data
collection stage, the raw data collected by sensors
often contains a large amount of redundant
information and noise. If directly uploaded to the
cloud, it will not only occupy a large amount of
network bandwidth but also increase the processing
burden of the cloud, resulting in a significant increase
in system latency (Wang et al., 2022).
3.2.2 Multi-Modal Data Fusion
The cloud receives structured data (such as
temperature values) and unstructured data (such as
fire smoke images captured by cameras) from
different sensors and conducts fusion analysis
through AI algorithms. Advanced AI algorithms are
used in the cloud for multimodal data fusion analysis.
Convolutional neural networks (CNNs) in deep -
learning algorithms perform well in image feature
extraction. For fire smoke images, CNNs can
automatically learn the texture, color, shape, and
other features of smoke, identifying the presence of
smoke in the image and its concentration distribution.
For structured temperature data, recurrent neural
networks (RNNs) and their variants (such as LSTM,
GRU) can effectively process time - series data,
analyze the changing trend of temperature over time,
and capture abnormal temperature fluctuations (Him
Eur et al., 2022).
3.2.3 Holographic Imaging Technology
Holographic technology uses the GPU cluster of the
cloud server to construct a 3D environmental model
in real - time. Through the interference of reference
light and object light and the reconstruction of the
image by light - wave diffraction, the amplitude and
phase information of the light wave are recorded,
achieving stereoscopic image display. After being
combined with the processed multi - modal data, it
provides an intuitive visual interaction interface for
environmental monitoring (Wang et al., 2023).
3.3 Technical Challenges and Advantages
3.3.1 Precise Positioning Problem
During the holographic interaction process of the
intelligent environmental monitoring system, the
accuracy of mid - air touch is significantly lower than
that of physical screens. This is because when
Applications of Computer Vision and Human—Machine Interaction in Environmental Monitoring
63

interacting with a physical screen, users receive clear
physical feedback, while when performing gesture
interactions in the air, this direct feedback mechanism
is lacking, restricting positioning accuracy. In
complex dynamic environments, such as forest fire
scenes, environmental factors (such as smoke, light
changes) will interfere with the sensor's recognition
of user gestures, further increasing the positioning
error. To solve this problem, it is necessary to
combine visual Simultaneous Localization and
Mapping (SLAM) technology. Visual SLAM
technology can construct a real-time environmental
map by identifying and tracking feature points in the
environment, thereby accurately determining the
position of user gestures in space, reducing
positioning errors, and significantly improving
interaction accuracy (Liu et al., 2021). This allows
inspectors to more accurately operate the holographic
image through gestures, achieving precise positioning
and processing of problem areas.
3.3.2 Spatio - Temporal Alignment Problem
In the time dimension, the data collection frequencies
of different types of sensors vary significantly. For
example, a temperature sensor may collect data once
per second, while a camera can capture 30 frames per
second. This difference in frequency will lead to time
asynchrony of data. If the data is directly fused, the
analysis results will be deviated and unable to
accurately reflect the true state of the environment. To
solve the time - synchronization problem, methods
such as dynamic interpolation or resampling are
usually adopted. Dynamic interpolation inserts
reasonable data values within the time interval
according to the changing trend of known data points;
resampling resamples the data to make the data of
different sensors reach the same frequency in time,
ensuring the accuracy of data fusion.
In the space dimension, accuracy errors between
the GPS coordinates of sensors and the geographic
information (GIS) of images also cause problems. For
example, in the fire- positioning scenario, there may
be a certain deviation in the GPS positioning of
sensors, and errors may also occur during the
processing and matching of geographic information
in images. The superposition of these two factors will
lead to a deviation in fire positioning, affecting
subsequent rescue decisions. To solve the space-
alignment problem, it is necessary to accurately
calibrate the GPS data of sensors and the GIS
information of images. Through technical means such
as coordinate transformation and matching
algorithms, accuracy errors can be reduced, ensuring
the spatial consistency of data from different sources
(Yang et al., 2022).
3.3.3 Advantages of Holographic Interaction
The cloud - based AI model has a powerful gesture -
parsing ability and can accurately identify various
gesture actions of inspectors, such as pinch - to -
zoom, swipe - to - rotate, etc. When an inspector
makes a pinch gesture, the cloud - based AI model
will dynamically adjust the zoom ratio of the
holographic image according to the preset algorithm,
allowing the inspector to view the environmental data
of the area of interest in more detail. The swipe - to -
rotate gesture is used to change the viewing angle of
the holographic image, enabling the inspector to
observe the environment from different angles for
comprehensive monitoring. Through these gesture
operations, inspectors can intuitively see information
such as geographical location and terrain elevation
differences, enhancing their perception of the
environmental situation. In the forest fire monitoring
scenario, when an inspector "grabs" the holographic
fire source marker through a gesture, the cloud - based
AI model will quickly trigger the drone inspection
and fire - fighting command after recognizing the
operation, achieving efficient fire emergency
handling and greatly improving the monitoring and
response efficiency.
3.3.4 Advantages of Edge - Cloud
Collaborative Architecture
In the edge - cloud collaborative architecture, edge
nodes play a crucial role. Edge nodes such as
NVIDIA Jetson have strong local data - processing
capabilities and can process a large amount of raw
data locally at the data source. By performing
operations such as data filtering, noise reduction, and
anomaly detection, edge nodes can process 80% of
the original data locally and only upload the key data
to the cloud. This process greatly reduces the amount
of data transmission, thereby significantly reducing
the demand for transmission bandwidth and enabling
the end - to - end latency to be controlled within 20ms,
ensuring the real - time performance of the
monitoring system.
In addition, edge nodes are highly independent
and reliable. In the event of a network outage, edge
nodes can still execute local decisions based on
locally stored data and preset decision - making logic.
For example, when abnormal environmental
parameters (such as excessive smoke concentration,
sudden temperature increase) are detected, even if
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
64

communication with the cloud is unavailable, edge
nodes can immediately trigger an alarm to alert
nearby personnel of potential dangers, buying
precious time for emergency handling, enhancing the
reliability and stability of the entire monitoring
system, and ensuring the continuous progress of
environmental monitoring work.
3.4 Analysis of Future Application
Scenarios
In automated agriculture, it can be used for
greenhouse monitoring, reducing the number of
manual inspections. Only cloud sensors are needed to
detect the growth of crops. In urban flood warning,
through sensor detection, supervisors can use
holographic technology to respond more quickly to
impending flood disasters and make reasonable
arrangements. In the face of forest fires, data from
sensors such as smoke and temperature are
transmitted to inspectors via the cloud. Inspectors can
use holographic technology to quickly identify the
location of the fire and prevent its spread.
4 CONCLUSION
This study aims to construct a low-latency, high-
precision intelligent environmental monitoring
system through multi- modal data fusion, an edge-
cloud collaborative architecture, and holographic
imaging technology, solving the bottlenecks of
traditional methods in real-time performance,
interaction efficiency, and data integration, and
providing scientific tools and low-cost, high-
reliability technical solutions for ecological
protection and disaster prevention and control. In the
future, through algorithm optimization, hardware
innovation, and policy support, large-scale
implementation is expected to be achieved, playing
an important role in ecological protection.
However, there are also some limitations. For
example, the accuracy of holographic interaction is
insufficient, the resolution of tactile feedback is low,
system deployment and maintenance costs are high,
and issues related to data processing and real-time
performance need to be continuously improved.
In the future, through algorithm optimization and
hardware innovation, it is possible to improve
accuracy, reduce latency, enhance sensing effects,
lightweight models, and with the support of policies,
achieve large-scale implementation and play an
important role in ecological protection.
REFERENCES
Chen, H. C.: ‘Research on Marker - less Gesture
Recognition Technology Based on Computer Vision
Technology.’ Electronic Components and Information
Technology, 2024, 8(10): 254 – 256
Han, Q. J.: ‘Application of Computer Vision Technology in
Crop Pest Monitoring.’ Southern Agricultural
Machinery, 2024, 55(S1): 58 - 60+77
Him Eur, Y., Rimal, B., Tiwary, A., & Amira, A.: ‘Using
artificial intelligence and data fusion for environmental
monitoring: A review and future perspectives.’
Information Fusion, 2022, 86 - 87: 44 – 75
Just Go for It Now.: ‘Literature Summary of 3D Detection
Based on Multi - Sensor Fusion (I).’ Artificial
Intelligence and Robot Technology, 2024, 28(6): 101 –
115
Liu, J., Liu, R., Chen, K., Zhang, J., & Guo, D.:
‘Collaborative Visual Inertial SLAM for Multiple
Smart Phones.’ ArXiv preprint arXiv:2106.12186,
2021
The Innovation Geoscience Editorial Department.:
‘Aerospace heritage: Footprints of human civilization
on and beyond Earth.’ Innovation Geoscience (English),
2024, 7(2): 200 – 215
The Innovation Geoscience Editorial Department.:
‘Carbon-negative transition by utilizing overlooked
carbon in waste landfills.’ Innovation Geoscience
(English), 2023, 6(4): 150 – 165
Wang, D., Li, Z. S., Zheng, Y. W., Li, N. N., Li, Y. L., &
Wang, Q. H.: ‘High - quality holographic 3D display
system based on virtual splicing of spatial light
modulator.’ ACS Photonics, 2023, 10(7): 2297 – 2307
Wang, J., Jian, W., & Fu, B. C.: ‘Edge - to – cloud
collaborative for QoS guarantee of smart cities.’ IFAC
- PapersOnLine, 2022, 55(11): 60 – 65
Yang, J., Lee, T. Y., Lee, W. T., & Xu, L.: ‘A design and
application of municipal service platform based on
cloud -edge collaboration for smart cities.’ Sensors
(Basel), 2022
Applications of Computer Vision and Human—Machine Interaction in Environmental Monitoring
65
