
Optimizing Visual SLAM for Robust and Scalable Mobile Robot
Navigation
Kaiyu Xu
International School of Information Science and Engineering, Dalian University of Technology, Digital Media,
Dalian, Liaoning Province,116620, China
Keywords: Vision SLAM, Robustness, Scalability, ORB, PPO.
Abstract: The application of vision Simultaneous Localization and Map Building (SLAM) to robot navigation is an
important field. But the main challenges faced in this field are how to improve robustness as well as scalability.
This thesis aims to optimize the robustness and scalability of vision SLAM in robot navigation. In this paper,
it mprove robustness and scalability from both deep learning and image processing. In deep learning, this
paper uses Convolutional Neural Network (CNN) algorithm for feature matching and constructs Proximal
Policy Optimization (PPO) algorithm model for training. In image processing, this paper mainly uses Oriented
FAST and Rotated BRIEF (ORB) technique for feature extraction and loopback detection. The result is that
all four experiments are well optimized for robustness and scalability. This allows the robot to operate in
complex environments without interference from other external factors, such as lighting conditions and
dynamic environments. It also allows the robot to adapt to larger environments and to take on the
computational load required to handle larger environments. Ultimately, it is hoped that these methods can be
applied to real-life robot navigation.
1 INTRODUCTION
Navigation systems are very famous and robot
navigation has a significant place in it. The use of
vision Simultaneous Localization and Map Building
(SLAM) is one of the important methods to achieve
robot navigation. However, traditional robot
navigation algorithms mainly rely on pre-constructed
environment maps and fixed path planning methods,
which will face many problems in practical
applications. Firstly, traditional algorithms are
environmentally dependent. These algorithms usually
need to run in a known environment and lack
adaptability to changes in the environment. If the
environment changes, maps need to be re-mapped,
increasing maintenance costs. Second, traditional
algorithms perform poorly when dealing with
dynamic environments, making it difficult to respond
to moving obstacles or people in real time, affecting
the reliability and safety of navigation. For example,
classical obstacle avoidance algorithms are slow to
respond in dynamic environments and difficult to
avoid obstacles effectively (Ghosh, Sanyal and
Mukherjee, 2024). In order to solve the above
problems, SLAM technology has been developed.
SLAM allows a robot to simultaneously build a map
of its environment and determine its own position in
an unknown or dynamic environment. This allows the
robot to navigate autonomously in unknown
environments without having to obtain a
map of the
environment in advance, making it more adaptable.
Secondly, SLAM is able to update the environment
map in real time, reflecting the environmental
changes in time, so that the robot can operate stably
even in dynamic environments. Moreover, by fusing
multiple sensor data, SLAM can effectively reduce
the accumulation of errors and improve the accuracy
of robot positioning and navigation. Among them,
visual SLAM has excellent performance. Vision
SLAM enables mobile robots to simultaneously
perform localization and environment mapping
through visual information without a map. In contrast
to LiDAR, vision SLAM relies on monocular,
binocular or RGB-D cameras as the primary sensors
(Mur-Artal and Tardós, 2017). The use of cameras as
sensors reduces the cost significantly and is obviously
much easier to acquire compared to radar. With the
development of deep learning and computer vision
and big data models, Oriented FAST and Rotated
BRIEF (ORB)-SLAM algorithms have emerged
Xu, K.
Optimizing Visual SLAM for Robust and Scalable Mobile Robot Navigation.
DOI: 10.5220/0014307300004718
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2025), pages 43-48
ISBN: 978-989-758-792-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
43

(Mur-Artal, Montiel and Tardos, 2015). It is a vision
SLAM method based on monocular camera, which
can greatly improve the efficiency of mobile robots,
and lays a solid foundation for the subsequent
development and application of vision SLAM.
Cadena et al. in ‘Past, Present, and Future of
Simultaneous Localization And Mapping: Towards
the Robust-Perception Age’ state that SLAM
technology has made significant progress over the last
30 years, enabling robots to able to navigate
autonomously in unknown environments, and
highlights the robustness and scalability of SLAM in
long-term operation (Cadena, Carlone, Carrillo, Latif,
Scaramuzza, Neira, Reid and Leonard, 2016).
Secondly, Zaffar et al. in ‘Sensors, SLAM and Long-
term Autonomy: a Review’ discuss the various
sensors used in SLAM systems and evaluate their
performance in long-term autonomous operation,
further illustrating the advantages of SLAM
technology in dynamic environments (Zaffar, Ehsan,
Stolkin and McDonald-Maier, 2018). In Hybrid
Navigation Method for Multiple Robots Facing
Dynamic Obstacles, the authors propose improved
reinforcement learning algorithms to enhance the
obstacle avoidance ability of robots in dynamic
environments, aiming to solve the navigation
problems caused by the accumulation of errors in the
traditional methods (Wang, Liu and Li, 2021).
Although vision SLAM has been widely used for
mobile robot navigation, it still faces some challenges
in practical applications. First, the robustness
problem is particularly prominent. Under complex
conditions such as light variations, dynamic
environments, and occlusions, traditional vision
SLAM systems tend to lose tracking ability or
generate inaccurate maps. For example, low-light
conditions or significant light changes can make it
difficult to extract visual features, which in turn
affects positioning accuracy. Therefore, optimizing
the robustness of vision SLAM bears the brunt. In
addition, there is a need to optimize the scalability of
the vision SLAM. This is because the scalability of
existing vision SLAM systems is limited as the size
of the environment increases. Building maps for
large-scale environments increases the computational
load, especially on resource-limited devices, making
it difficult to process or store large-scale
environmental data in real-time.
The aim of this study is to propose a new
framework for optimized visual SLAM with the aim
of improving the robustness and scalability of SLAM
systems. Deep learning and image processing will be
combined, Matlab and python will be used to improve
the robustness and scalability of visual SLAM.
2 METHOD
2.1 Data Sources
The data sources are mainly graphical. It is used for
Convolutional Neural Network (CNN) feature
extraction as well as ORB feature matching. The data
source is mainly image based. CNN feature extraction
as well as ORB feature matching uses a set of gate
images as samples. The difference is that in CNN
feature extraction, ResNet50 is used as the feature
extraction network.
In Proximal Policy Optimization (PPO), instead
of using an external real dataset, a simulation
environment is constructed to generate the ‘data’ for
training, i.e., the generation of environmental data.
Firstly, a simple SLAM robot navigation environment
is defined, and secondly, an observation space is
defined, which is defined as a grey scale image of
shape (64, 64, 1), i.e., a single-channel image of
64×64 pixels. Finally, the action space is defined and
the action space is defined as discrete 3 actions
representing forward, left turn and right turn
respectively.
Next is the relevant dataset used for ORB
loopback detection. Since loopback detection is used
to check whether the robot has returned to the
previously passed position, it need to process many
frames of the image. However, it is difficult to obtain
a large number of images of the same scene quickly,
so the study thought of acquiring a large number of
images of a fixed place by time-lapse photography.
Time-lapse photography refers to the use of a camera
to record changes in the same scene over time, such
as recording the environment of a street from sunrise
to sunset. The recorded video is then captured evenly
over 50 frames. In this way the study get a large
number of images for loopback detection.
2.2 Method
2.2.1 CNN
CNN is a deep learning model specifically designed
for processing grid-structured data (e.g., images).
CNN is one of the core technologies for computer
vision tasks by performing feature extraction and
classification through Convolutional Layers, Pooling
Layers, and Fully Connected Layers (LeCun, Boser,
Denker, Henderson, Howard and Jackel, 1989).
Firstly, CNN can perform local connectivity and
weight sharing. CNN uses convolutional operations
to extract features from local regions, and
significantly reduces model parameters by sharing
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
44

weights, thus improving learning efficiency and
generalization ability. Secondly, by stacking multiple
layers of convolutional and pooling layers, CNNs are
able to extract higher semantic features layer by layer
from low-level features, which demonstrates a good
capability of hierarchical modelling (Albawi,
Mohammed and Al-Zawi, 2017). CNN can also
introduce a certain degree of translation invariance
through operations such as maximal pooling, which
makes the model robust to slight deviations in the
input data (Li, Zhang, Liu and Yang, 2021).
2.2.2 PPO
Besides CNN, the study can also use PPO to improve
robustness. Proximal Policy Optimization (PPO) is a
reinforcement learning algorithm. It belongs to the
category of Policy Gradient Methods (PGMs), which
are used to train an agent to perform optimal decision
making in an environment (Schulman, Wolski,
Dhariwal, Radford and Klimov, 2017). PPO is widely
used in robot control, game AI, and autonomous
driving by improving the PGMs and improving the
sample utilization rate while ensuring the training
stability.
2.2.3 ORB
ORB is an efficient feature extraction and matching
algorithm for real-time applications (Rublee, Rabaud,
Konolige and Bradski, 2011). It combines FAST
(feature detection) and BRIEF (feature description)
and is optimized for rotational invariance, making it
particularly suitable for robot vision tasks such as
SLAM.
2.2.4 Experimental Steps
First is CNN feature extraction. This paper loaded
ResNet50 as a feature extraction network, which is a
deep CNN with a depth of 50 layers capable of
extracting high-level image features. In the SLAM
task, using a pre-trained CNN network can extract
more representative visual features, thus improving
the accuracy of loopback detection. The two test
images are then read and resized. These two images
should be keyframes captured at some point in time
during the SLAM process. And resize the images to
be the size it needs for ResNet50. If the sizes don't
match, it may cause the next feature extraction to fail.
After that CNN features are extracted. The last fully
connected layer of ResNet50 (fc1000) is selected as
the feature output. Then calculate the cosine
similarity of the two images and output the similarity
result. Finally, the study set a similarity threshold for
judging the results of loopback detection. If the
similarity is greater than the similarity threshold, it
means that the features of the two images are close
and may be loopback keyframes. If the similarity is
less than the similarity threshold, it means that the
two images have large differences and do not belong
to the loopback detection matching range.
This paper can use the PPO algorithm to train a
robot to navigate in a visual SLAM environment.
First, this paper creates a simple SLAM robot
navigation environment. This environment is divided
into the robot's observation space and action space.
The environment observed by the robot is a 64*64
grey scale image, which is the SLAM map. The
robot's action space is divided into forward, left turn
and backward. Consider the need to reset the
environment when a new turn begins. So the study
need to reset the environment. Then determine the
robot's reward mechanism and termination conditions.
The reward mechanism is divided into rewards and
minor penalties. The termination condition can be set
to terminate the action of the robot after performing
100 rounds. After that define the PPO policy network
and train the PPO agent. Then there is a loop to train
the robot for 100 rounds.
In addition to applying deep learning to improve
robustness, the study can also improve it through
simple image processing.
This paper use the ORB algorithm for feature
matching to optimize robustness.
First the SLAM keyframes are read, that is, the
two images are read. Then the images are converted
into grey scale maps. This is because ORB feature
extraction algorithms usually perform better on
greyscale images. The greyscale image reduces the
computational complexity while retaining the most
critical visual information, making feature detection
more stable. After that ORB is used for feature point
detection. After that ORB key points are used to
extract the feature descriptors. ORB feature
descriptors are a type of binary descriptor (BRIEF)
that can effectively represent the local image
information of the feature points. ORB feature
extraction is capable of generating a unique descriptor
for each key point, which will be used to match the
similar points in the subsequent steps. Feature
matching is then performed. The core goal of feature
matching is to find the same visual features between
two frames, and these matching points can help the
robot understand its relative position in the
environment. The matching points are then counted
and if there are too few matching points, the feature
matching fails. Generally three is the minimum
acceptable number of matching points. After that the
Optimizing Visual SLAM for Robust and Scalable Mobile Robot Navigation
45

coordinates of the matching points are obtained and
the results are visualized.
In addition to feature matching, the study can also
use ORB to perform loopback detection on a series of
images.
Loopback detection is a key aspect in vision
SLAM, which is mainly used to detect whether the
robot has returned to the previously passed location.
Since SLAM systems accumulate errors over a long
period of time, loopback detection can improve the
consistency and accuracy of the map by identifying
the same scene and correcting the position estimation
errors. In applications such as robot navigation and
autonomous driving, loopback detection plays a role
in global optimization, enabling SLAM systems to
construct more accurate and robust maps.
Firstly 50 images are read and these images are
labelled with sequence from 1 to 50. Then it is
converted into grey scale image and key point
detection is performed and then the corresponding
ORB features are extracted. After that loopback
detection is performed, so-called loopback detection
is to perform multiple feature matching. Greater than
the set matching threshold means that the matching is
successful, and the two images that are matched
successfully are called matched pairs, also known as
loopback frame pairs. Finally all the loopback pairs
are output. So the essence of loopback detection by
ORB is feature matching on multiple pairs of images.
3 ANALYSIS OF RESULTS
3.1 The Experiment About CNN
Feature Extraction
Firstly, experiments about feature extraction with
CNN algorithm and thus improving robustness are
carried out by Matlab. Figure 1 shows two different
views of a door. And the similarity threshold is set to
0.8. The final result is obtained with a similarity of
0.8324. Since this similarity is greater than 0.8, it may
be a loopback keyframe.
Figure 1: Two different views of a door (Photo credit :
Original).
Figure 1(a) shows the full view of the door, while
Figure 1(b) shows the door handle part of the door,
the two figures have a high degree of similarity, it is
a loopback keyframe.
3.2 The Experiment About PPO
Next are experiments to train the PPO model to
improve robustness and scalability. This experiment
was conducted on python. After 100 rounds of
training, the model is ready to be applied to robot
navigation on visual SLAM.
Figure 2: Training Reward Trend (Photo credit: Original).
Figure 2 shows a line graph on the number of
training rounds and cumulative rewards. According to
the Figure2, the study find that as the number of
rounds increases, the cumulative reward also tends to
rise, and the two are positively correlated.
3.3 The Experiment About ORB
Figures Matching
The first is an experiment on feature matching using
ORB, which is also performed on Matlab. The final
number of matched points obtained is 54. The
beginnings and ends of the yellow lines in the
diagrams connect the red dots and green markers of
the two diagrams, respectively, and the yellow lines
represent places where the same door in both
diagrams agrees. The study can find that the yellow
lines in both figures are mainly densely concentrated
near the door handles, which indicates that the
features of the door handles in both figures are highly
matched. This indicates that the door handles in the
two figures are highly matching features.
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
46
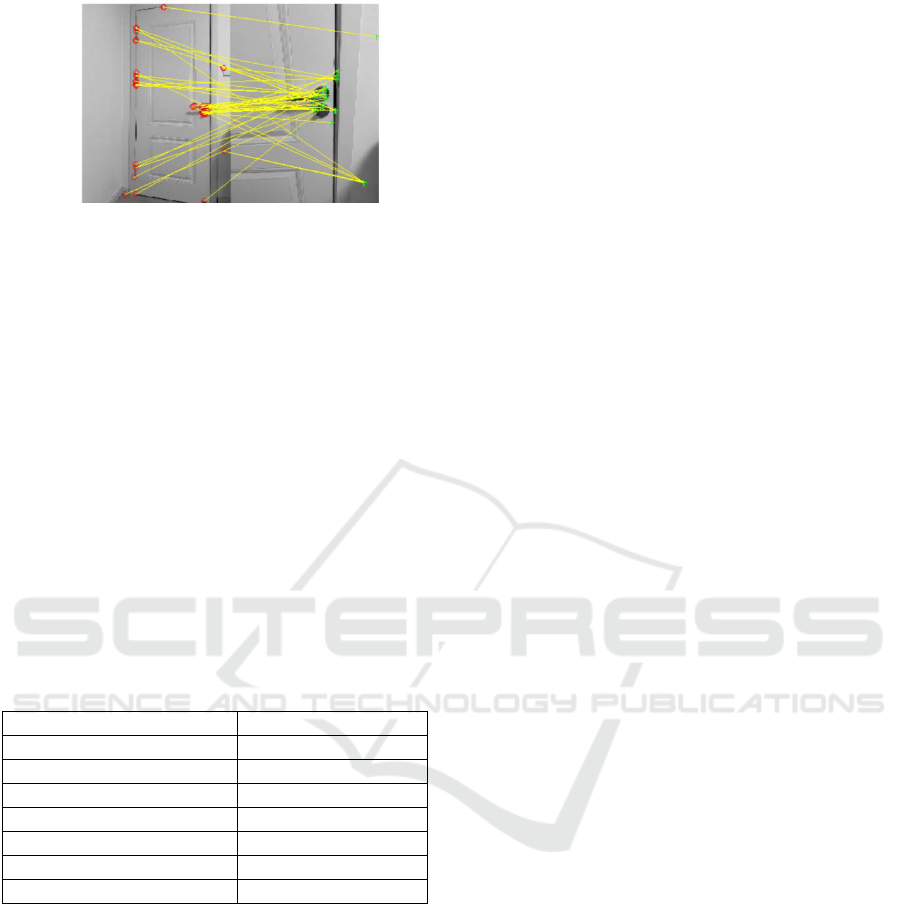
Figure 3: Feature matching (Photo credit: Original).
Figure 3 shows feature matching for the same
door from different viewpoints. The yellow lines are
mainly clustered near the door handles, so the door
handles are highly similar features.
3.4 The Experiment About ORB
Loopback Detection
Finally, there is an experiment on loopback detection
using ORB. Again, this was performed on Matlab.
Loopback detection is essentially performing feature
extraction on a series of images multiple times. Since
time-lapse photography of the same scene is used,
many pairs of loopback frames are generated in these
50 images, and the table below shows only a portion
of the pairs of loopback frames. Table 1 shows some
of the loopback frame pairs.
Table 1: Partial loopback frame pairs.
Loopback frames
1
2
1
3
1
5
2
3
2
4
3
4
3
5
4 CONCLUSION
In this paper, it optimize the robustness and
scalability of visual SLAM for robot navigation by
looking at both deep learning (CNN,PPO) and image
processing techniques (ORB)
CNN can extract the similarity between two
images through feature extraction, improving the
visual perception ability during SLAM process. In
addition, CNN can optimize loop detection and
improve map accuracy. However, this feature
extraction experiment also has defects: because the
similarity threshold is an important basis about
whether two images are loopback keyframes or not,
but the similarity threshold in this experiment is set
by us artificially, so how to set a reasonable similarity
threshold is the difficult problem.
The paper provided a PPO model for improving
robustness and trained it. It can optimize the decision-
making strategy of robots in the SLAM process,
improve path planning and exploration capabilities.
However, it has not been applied to robots, so relevant
practices are the focus of future research.
By using the ORB algorithm for keyframe
matching and combining it with loop detection, real-
time performance and accuracy can be improved,
ensuring stable mapping and localization. But there is
a flaw in the feature matching experiments about
ORBs: the two places connected at the beginning and
end of some of the yellow lines are not the same place
in the same door in both diagrams, so this means that
not all of the yellow lines are accurate. In practical
applications, CNN can be combined for feature
extraction, ORB for loop detection, PPO for decision
optimization, and more efficient robot navigation
systems can be constructed.
For the future, the paper can focus on applying
these methods to real-life robot navigation. For
example, applying the PPO model trained in this
paper to real robot navigation. The significance of the
research in this paper is to optimize the robustness
and scalability of visual SLAM for robot navigation,
which is finally reflected in real robot navigation
applications.
REFERENCES
Albawi, S., Mohammed, T. A., Al-Zawi, S., 2017.
Understanding of a convolutional neural network. In
2017 International Conference on Engineering and
Technology (ICET), 1-6.
Cadena, C., Carlone, L., Carrillo, H., Latif, Y., Scaramuzza,
D., Neira, J., Reid, I., Leonard, J. J., 2016. Past, Present,
and Future of Simultaneous Localization And Mapping:
Towards the Robust-Perception Age. IEEE
Transactions on Robotics, 32(6), 1309–1332.
Ghosh, S., Sanyal, S., Mukherjee, A., 2024. Obstacle
Avoidance and Path Planning Methods for
Autonomous Navigation of Mobile Robot. Sensors,
24(11), 3573.
LeCun, Y., Boser, B., Denker, J. S., Henderson, D., Howard,
R. E., Jackel, L. D., 1989. Backpropagation applied to
handwritten zip code recognition. Neural Computation,
1(4), 541–551.
Li, Y., Zhang, J., Liu, W., Yang, J., 2021. A survey of
convolutional neural networks: analysis, applications,
and prospects. IEEE Transactions on Neural Networks
Optimizing Visual SLAM for Robust and Scalable Mobile Robot Navigation
47

and Learning Systems. DOI:
10.1109/TNNLS.2021.3075429.
Mur-Artal, R., Montiel, J. M. M., Tardos, J. D., 2015. ORB-
SLAM: A versatile and accurate monocular SLAM
system. IEEE Transactions on Robotics, 31(5), 1147–
1163.
Mur-Artal, R., Tardós, J. D., 2017. ORB-SLAM2: An open-
source SLAM system for monocular, stereo, and RGB-
D cameras. IEEE Transactions on Robotics, 33(5),
1255–1262.
Rublee, E., Rabaud, V., Konolige, K., Bradski, G., 2011.
ORB: An efficient alternative to SIFT or SURF. In
Proceedings of the IEEE International Conference on
Computer Vision (ICCV), 2564–2571.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A.,
Klimov, O., 2017. Proximal Policy Optimization
Algorithms. arXiv preprint, arXiv:1707.06347.
Wang, Y., Liu, Y., Li, X., 2021. Hybrid Navigation Method
for Multiple Robots Facing Dynamic Obstacles.
Tsinghua Science and Technology, 26(5), 674–691.
Zaffar, M., Ehsan, S., Stolkin, R., McDonald-Maier, K.,
2018. Sensors, SLAM and Long-term Autonomy: A
Review. arXiv preprint, arXiv:1807.01605..
EMITI 2025 - International Conference on Engineering Management, Information Technology and Intelligence
48
