
Future Vibration Estimation Using LSTM for Condition-Based
Maintenance of Aircraft Systems
Hüseyin Şahin
a
and Ömer Faruk Göktaş
b
Vocational School of Technical Science, Ankara Yildirim Beyazit University, Ankara, Turkey
Keywords: Deep Learning, Aircraft System, Vibration Prediction, Predictive Maintenance, Condition-Based
Maintenance.
Abstract: This study presents a deep learning-based approach for enhancing Condition-Based Maintenance (CBM)
strategies in aircraft systems by utilizing Long Short-Term Memory (LSTM) networks to forecast future
vibration trends. Using high-resolution time-series data from the NASA IMS Bearing Dataset, the proposed
LSTM model successfully captures complex temporal dependencies that characterize degradation behaviour
in aircraft components. Experimental results demonstrate that the model achieves high prediction accuracy
with a low Mean Absolute Error (MAE) of 0.0010, enabling timely detection of incipient faults and
minimizing unnecessary maintenance interventions. Compared to traditional models, LSTM networks offer
high performance in learning nonlinear patterns and maintaining predictive reliability under varying
operational conditions. The integration of LSTM-based forecasting into CBM frameworks supports proactive
maintenance planning, reduces lifecycle costs, and increases aircraft safety. This study contributes to the
literature by validating the practical implementation of LSTM in real-world aerospace maintenance
workflows, offering a scalable and intelligent solution for predictive maintenance in both civil and military
aviation contexts.
1 INTRODUCTION
In modern aircraft systems, reliability and safety are
important. Conventional maintenance strategies such
as corrective or time-based maintenance often result
in either excessive downtime or the risk of undetected
failures. In contrast, Condition-Based Maintenance
(CBM) offers a proactive and data-driven solution
that enables timely interventions based on the actual
health status of aircraft components (Choi et al.,
2016).
CBM constitute a paradigm shift in aircraft
engineering, promising significant enhancements in
the efficiency and safety of aircraft systems. Unlike
traditional maintenance strategies that rely on time-
based schedules or reactive responses to mechanical
failures. CBM uses real-time data to assess the
ongoing health of aircraft components. This proactive
approach is facilitated by the integration of advanced
sensors and monitoring technologies that gather
crucial information such as vibration patterns,
a
https://orcid.org/0000-0003-0464-2644
b
https://orcid.org/0000-0002-2021-4052
temperature fluctuations or pressure levels
(Kabashkin & Perekrestov, 2024). By analysing these
data, CBM enables the timely identification of
potential failures, allowing maintenance actions to be
precisely aligned with the actual condition of the
components. This not only prevents unnecessary
maintenance interventions but also minimizes the risk
of unexpected downtimes or catastrophic failures.
Thereby improve the reliability and availability of
aircraft systems. In the context of aircraft industry,
where operational efficiency and safety are important,
CBM emerges as an indispensable tool for modern
aircraft maintenance strategies (Verhagen et al.,
2023).
A key advantage of CBM in aircraft is integration
with health monitoring systems and machine learning
algorithms, which allow for fault prediction and
anomaly detection. These capabilities not only
increase operational efficiency but also improve
flight safety by preventing failures. For example,
research by Ozkat et al. showed that deep learning
¸Sahin, H. and Gökta¸s, Ö. F.
Future Vibration Estimation Using LSTM for Condition-Based Maintenance of Aircraft Systems.
DOI: 10.5220/0014299800004848
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Conference on Advances in Electrical, Electronics, Energy, and Computer Sciences (ICEEECS 2025), pages 169-175
ISBN: 978-989-758-783-2
Proceedings Copyright © 2026 by SCITEPRESS – Science and Technology Publications, Lda.
169
models applied to vibration sensor data on a real-time
UAV can predict when it will fail and provide a
critical window for preventive action (Ozkat et al.,
2023).
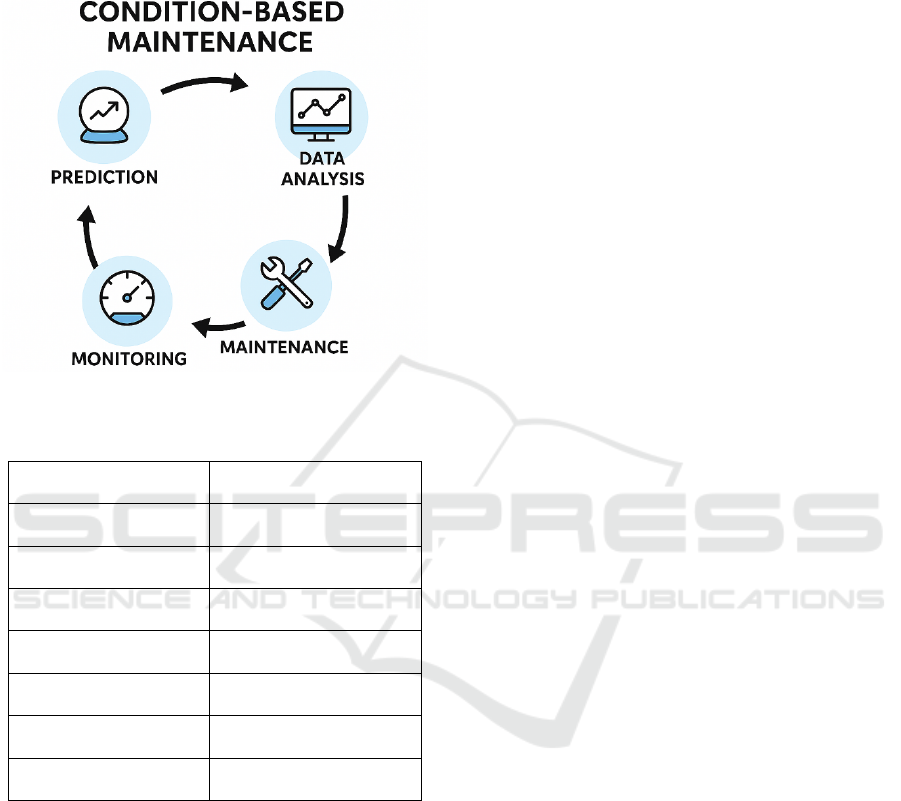
Figure 1: Schematic representation of CBM process.
Table 1: Advantages and disadvantages of RUL forecasting.
Benefits of RUL
Forecasting
Challenges in RUL
Forecasting
Proactive maintenance
p
lannin
g
Uncertainty and forecast
accurac
y
Prevention of
unex
p
ected failures
Complex system
d
y
namics
Optimizing maintenance
costs
Insufficient historical data
Increasing equipment
availabilit
y
Impact of environmental
factors
Improving spare parts
inventor
y
mana
g
ement
Presence of multiple
failure modes
Increasing operational
securit
y
Sensor noise and errors
Efficient use of
resources
Computational
complexit
y
Moreover, CBM has been adopted in both civil
and military aircraft applications, including programs
such as Health and Usage Monitoring Systems
(HUMS) used in helicopters and Integrated Vehicle
Health Management (IVHM) systems in fixed-wing
aircraft(Hünemohr et al., 2022; Scott et al., 2022).
The use of CBM has led to cost savings and
maintenance performance, as noted by the U.S.
Department of Defense's CBM+ initiative
(Department of Defense, 2024).
In summary, CBM is an innovative approach in
aircraft maintenance planning. Its capacity to
synchronise maintenance operations with the
prevailing conditions of the system, thereby
minimising the necessity for unscheduled
maintenance interventions, and its ability to facilitate
the implementation of predictive analytics, renders it
an indispensable instrument for the future generation
of aircraft safety and sustainability. The primary aim
of this study is to evaluate the effectiveness of CBM
applications in reducing maintenance costs and
enhancing operational efficiency in aircraft systems.
The necessity for such improvements stems from the
limitations of traditional maintenance approaches. The
utilisation of CBM allows for the synchronisation of
maintenance operations with the true condition of
aircraft components (Cusati et al., 2021). This
approach has the potential to synchronise maintenance
practices with performance requirements, thereby
reducing the overall cost of aircraft operations over
their lifecycle. Furthermore, the use of CBM systems
has been found to enhance the operational reliability
and safety of military and civilian aircraft systems.
(Ernest Yat-Kwan Wong et al., 2006). The study's aim
is to provide empirical evidence and insights into the
cost-effectiveness and operational advantages of
integrating CBM methodologies into current aircraft
maintenance models.
The methodology deployed in this study uses Long
Short-Term Memory (LSTM) models to analyse
vibration data for CBM systems. The study focuses on
the importance of predictive maintenance in aircraft,
and on the capabilities of LSTM in processing time-
series data, which is crucial for understanding and
predicting the future states of aircraft components.
LSTM networks are especially appropriate for
modelling sequential data with long-range temporal
correlations (Malhotra et al., 2016). The integration of
LSTM models in the analysis is a key aspect of the
approach, with the objective being to achieve
enhanced prediction accuracy (Peringal et al., 2024).
The potential real-world implications of research
on CBM within the aircraft discipline are of
considerable importance. The adoption of a predictive
and data-driven approach, as opposed to the traditional
reactive maintenance strategy, enables CBM to
implement interventions prior to the occurrence of
failures. This proactive strategy has been shown to
have a significant impact on maintenance costs, with
a consequent reduction in aircraft downtime and
enhancement of system reliability. Through the
integration of CBM strategies, maintenance activities
in aircraft systems can be aligned more closely with
actual equipment condition, allowing for optimized
scheduling, reduced downtime and increased overall
mission reliability. Consequently, CBM applications
offer considerable economic and operational
advantages, further encouraging the thorough
ICEEECS 2025 - International Conference on Advances in Electrical, Electronics, Energy, and Computer Sciences
170
evaluation and advancement of predictive techniques,
such as the LSTM models investigated in this study,
to enhance the efficiency of these systems in real-
world operational applications.
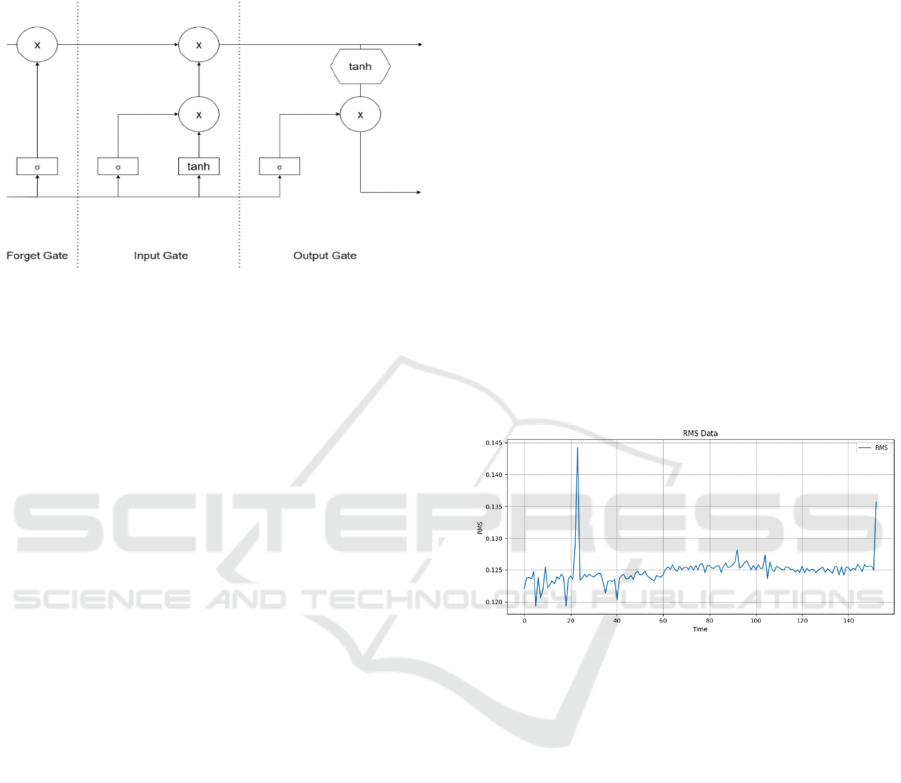
Figure 2 LTSM Neural Network Architecture.
The potential real-world implications of research
on CBM within the aircraft discipline are of
considerable importance. The adoption of a predictive
and data-driven approach, as opposed to the
traditional reactive maintenance strategy, enables
CBM to implement interventions prior to the
occurrence of failures. This proactive strategy has
been shown to have a significant impact on
maintenance costs, with a consequent reduction in
aircraft downtime and enhancement of system
reliability. Through the integration of CBM
strategies, maintenance activities in aircraft systems
can be aligned more closely with actual equipment
condition, allowing for optimized scheduling,
reduced downtime and increased overall mission
reliability. Consequently, CBM applications offer
considerable economic and operational advantages,
further encouraging the thorough evaluation and
advancement of predictive techniques, such as the
LSTM models investigated in this study, to enhance
the efficiency of these systems in real-world
operational applications.
2 METHODOLOGY
The vibration data used in this study were obtained
from the NASA IMS Bearing Dataset, a recognised
standard in the field of condition monitoring research
(J. Lee et al., 2007). This dataset consists of
continuous vibration measurements which reflect the
life cycles of bearings under applied loads. These
measurements are effective in simulating mechanical
degradation in real-world conditions. The high-
resolution, time-series data is essential for predictive
maintenance modelling. The dataset provides a robust
foundation for the application of LSTM networks in
estimating future vibration trends. The selection of
this dataset, which includes critical failure modes,
ensures that the research methodology is well-suited
to address challenges in the implementation of CBM
in aircraft systems.
The vibration data used in this study were
obtained from a bearing test rig developed by the NSF
I/UCRC Intelligent Maintenance Systems Center in
the United States. The test rig consists of four
Rexnord ZA-2115 double row ball bearings
connected to a shaft rotating at a constant speed of
2000 RPM. A radial load of 6000 pounds (~26700 N)
was applied to the shaft and all bearings were
operated with a forced lubrication system. Vibration
data was collected by means of high precision
piezoelectric ICP accelerometers type PCB 353B33
mounted on the bearing housings. In the first data set,
a total of two axes of data were collected for each
bearing in the x and y axes, while in the other sets
only single axis measurements were made(Qiu et al.,
2006).
Figure 3: RMS Vibration Data for Bearing.
The preprocessing of vibration data is a critical
step in preparing it for LSTM model training, and it
is essential to ensure the quality and integrity of the
input. Initially, the raw vibration signals from the
NASA IMS Bearing Dataset are subjected to Min-
Max normalization. This technique is employed to
scale the data range between 0 and 1, thus helping to
minimise the effects of varying scales and
magnitudes, consequently enabling improved
convergence during the training phase. This approach
is crucial in ensuring that each feature contributes
equally to the gradient descent optimisation process,
thus preventing discrepancies that may arise from
differing units and ranges. Following this, the
normalized data is processed by generating window-
based sequences, a step that configures the time-
series data into a structured format suitable for LSTM
input. Each sequence is characterised by a
predetermined number of time steps, which are
represented by a multidimensional array, thereby
Future Vibration Estimation Using LSTM for Condition-Based Maintenance of Aircraft Systems
171

conforming to the LSTM's requirement for
continuous temporal data inputs. The subsequent
phase involves the extraction of features, with the aim
of reducing the dimensionality of the data set and
thereby extracting meaningful information. This
process employs Root Mean Square (RMS) metrics
as a means of quantifying the variability of the data.
The RMS value, calculated over each time window,
represents an aggregate of vibration magnitude,
serving as a key indicator of bearing condition and
mechanical health. By transforming the data into this
comprehensive format, the preprocessing pipeline
equips the LSTM model with precise and statistically
comprehensive inputs, enhancing its ability to predict
future vibration trends accurately.
The LSTM neural network was implemented to
model time-series vibration data, thanks to its ability
to identify long-range dependencies. The LSTM
architecture comprises multiple layers that are
designed to handle the sequence prediction tasks that
are particular to the dataset. At its core, the network
comprises an input layer, followed by a series of
(LSTM) layers. These layers incorporate cells that are
structured to retain information across time steps
through gates, namely input, forget and output gates.
This enables the network to effectively retain memory
and learn sequences. The network uses a
configuration of hidden layers comprising LSTM
blocks stacked on top of each other. Each block
processes a specific aspect of the temporal data (Al-
Selwi et al., 2024). LSTM networks are an enhanced
form of recurrent neural networks (RNNs). The
hidden layer of an LSTM network has a gated unit,
also known as a gated cell. The LSTM consists of four
interconnected layers that produce the cell's output
and cell state. These two layers are then transferred to
the next hidden layer. LSTMs consist of three logistic
sigmoid gates and one tanh layer.
The forget gate is crucial to an LSTM network
because it discards information that is irrelevant for
the current prediction context. When the gate outputs
a value close to zero, the corresponding content is
effectively eliminated from the cell state. Conversely,
an output near one ensures that the information is
retained for subsequent time steps. The input gate
enables new data, relevant information to be
integrated into the cell state. This selective update is
derived from processed input data and modulated by
a learnt weight structure. Finally, the output gate
determines which parts of the current cell state are
propagated to the next layer or output. This shapes the
model's final prediction at that time step.
The LSTM models were trained and validated
using Python as the primary programming
environment and TensorFlow and Keras as the
frameworks for creating and refining the neural
network architecture. The LSTM model was designed
using a sequential layer setup to take full advantage
of Keras's high-level capabilities and streamline the
implementation process. In order to prepare the
network for rigorous testing, the model underwent
several iterations in order to calibrate
hyperparameters such as the number of hidden units,
learning rate, and batch size. The Python libraries
NumPy and Pandas were instrumental in the
management of data operations and the facilitation of
the execution of the training pipeline. Regular
checkpoints were conducted throughout the iterative
process to capture the model's state, guaranteeing a
robust recovery procedure if necessary. The
evaluation of the trained LSTM models was
conducted within the same framework, using a test set
that was separated at the outset of the data processing
workflow to ensure the maintenance of unbiased
evaluation metrics. The implementation of these
methodologies ensured the establishment of a reliable
predictive model capable of estimating future
vibration trends with a high degree of accuracy.
The visualisation of results and the evaluation of
prediction accuracy are critical components of the
research methodology, facilitating in-depth analysis
of the LSTM model's performance. For the purposes
of this study, the Python library Matplotlib was
utilised in order to create comprehensive
visualisations. These tools enabled the creation of
various plots, including line graphs showing
predicted and actual vibration trends over time,
thereby facilitating a clear visual comparison. The
assessment of the model's accuracy was conducted by
utilising standardised metrics, namely the mean
absolute error (MAE) and the root mean square error
(RMSE). These metrics offer quantifiable indicators
of prediction accuracy and are imperative for the
evaluation of the model's validity. The analysis was
enriched with graphical plots, which highlighting the
model's ability to track actual trends and identify
potential inconsistencies. This information forms the
basis for understanding the model's predictive
capacity in real-world aircraft and space CBM
scenarios.
3 RESULTS
The LSTM architecture demonstrated a strong
capability in forecasting future trends in RMS
vibration data, a critical aspect for the effective
implementation of condition-based maintenance in
ICEEECS 2025 - International Conference on Advances in Electrical, Electronics, Energy, and Computer Sciences
172
aircraft systems. The network was able to process
high-frequency signals obtained from the IMS
Bearing Dataset effectively by leveraging its strength
in modelling temporal dependencies. The system's
capacity to monitor and analyse minute yet
substantial variations in RMS values over time allows
for the early identification of degradation indicators,
often preceding the onset of apparent system failures.
This predictive advantage enhances the ability of
maintenance teams to initiate timely interventions,
thereby contributing to improved operational safety
and logistical efficiency in aircraft. Furthermore, the
model enables more strategic maintenance planning
by continuously monitoring vibration behaviour and
providing reliable short-term forecasts. This results in
minimised unnecessary servicing and optimised
resource use and cost-efficiency. The enhanced
performance of the LSTM model is attributable to its
design, which is optimally suited to the analysis of
sequential data. This model is a highly effective
analytical tool for advancing condition-based
maintenance in aircraft applications.
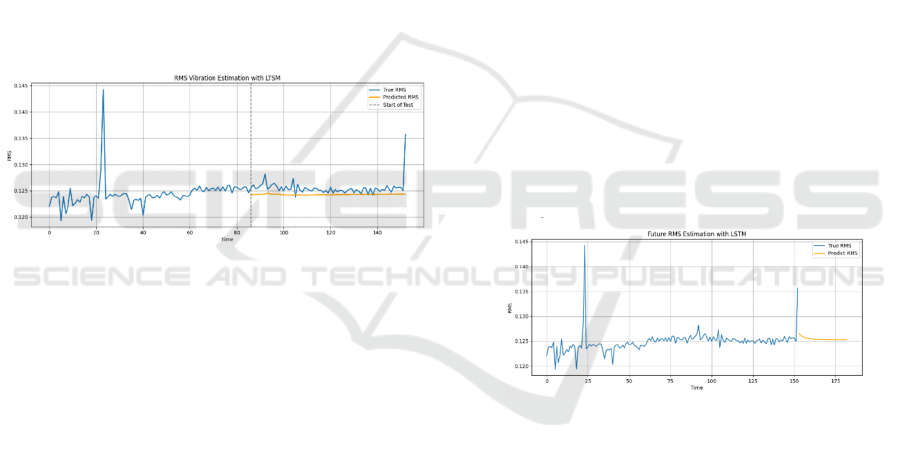
Figure 4: The prediction result used 50% as training data
and 50% as test data
The LSTM model demonstrated a remarkable
capacity to precisely forecast future RMS vibration
trends, a capability that is of paramount importance
for condition-based maintenance of aircraft systems.
The model uses its realistic ability to understand
complex time patterns to create a model of high-
frequency vibration data from the IMS Bearing
Dataset. The model's capacity to forecast alterations
in RMS values over time signifies its ability to discern
subtle yet substantial changes in component
conditions prior to the manifestation of evident
issues. The implementation of this process enables
team members to engage in proactive actions, thereby
facilitating enhanced safety standards and optimising
operational efficiency, a particularly salient
consideration within the domain of aircraft
engineering and maintenance. Maintenance
professionals are able to enhance their planning
processes, avoid unnecessary actions, and achieve
financial and temporal efficiencies by monitoring
RMS trends and making accurate predictions. The
LSTM model's capacity for accurate prediction is
attributable to its design, which is optimally suited to
the analysis of time-based data. This development
indicates that the system is a powerful tool for
improving condition-based maintenance in aircraft
systems.
The predictive performance of the LSTM model
was systematically assessed through a set of widely
recognized evaluation metrics, namely MAE and
RMSE. The model demonstrated a strong predictive
capability, achieving a low MAE of 0.0010, which
indicates high accuracy in estimating future RMSE
vibration patterns in aircraft system components.
Additionally, the RMSE value approaching zero
reinforces this finding by reflecting minimal
divergence between predicted and actual values
across the time series. However, the observed R²
value of -0.6838points to limitations in the model’s
ability to explain variance within the dataset, which
can be attributed to the complex and highly nonlinear
nature of the underlying degradation mechanisms.
This discrepancy suggests that while the model is
effective in short-term trend prediction, it may face
challenges in modelling long-term structural variance
in highly stochastic systems. These results support the
model’s applicability in real-world aircraft
maintenance workflows, where timely and accurate
predictions are essential for ensuring operational
reliability and cost-effectiveness.
Figure 5: The prediction result used 100% as training data.
The strong ability of the LSTM network to model
sequences gives it a clear advantage compared to
traditional predictive models, especially in the field
of condition-based maintenance. LSTM networks are
explicitly designed to learn and preserve long-term
dependencies through a gated memory cell
architecture. This design enables them to dynamically
adjust to evolving data distributions and recognize
intricate vibration patterns that may precede
mechanical failures. The model's robustness in such
contexts is reflected in its consistently low prediction
errors, even under varying operational conditions and
non-uniform degradation rates. The ability of LSTM
models to retain relevant historical information and
update internal representations in response to new
input makes them particularly effective in early
Future Vibration Estimation Using LSTM for Condition-Based Maintenance of Aircraft Systems
173

anomaly detection and maintenance forecasting.
Consequently, their integration into predictive
maintenance pipelines represents a significant leap
forward in aircraft maintenance planning, enabling
data-driven, cost-efficient, and proactive
interventions that improve overall system reliability
and operational safety.
4 DISCUSSION AND
CONCLUSIONS
This study emphasises the pivotal function of LSTM
networks in optimising the execution of CBM
strategies within the aircraft engineering industry.
The proposed model enables high-accuracy
forecasting of future vibration behaviour, thereby
signifying a methodological departure from
conventional maintenance practices. Conventional
maintenance practices are primarily based on fixed
time intervals or reactive repairs following fault
detection. LSTM networks have been demonstrated
to have strong capabilities in modelling nonlinear and
temporally complex datasets, particularly those
derived from the operational behaviour of aircraft
subsystems. This facilitates the early identification of
degradation patterns, thereby enabling predictive
interventions to be implemented before faults evolve
into critical failures. Such foresight supports
maintenance strategies that are both targeted and
timely, significantly reducing unplanned
maintenance and improving the operational safety
and reliability of aircraft in both the civil and defence
industries. The findings of this research affirm that
the integration of LSTM models into CBM
architectures provides a data-driven and adaptive
maintenance paradigm, whereby servicing actions are
aligned with the real-time health status of system
components. This enhanced predictive capability has
been demonstrated to contribute to substantial cost
savings by reducing the need for maintenance and
optimising the efficiency of resource allocation
within aircraft operations.
The present study aims to contribute to the
literature in the field of CBM by integrating LSTM
models and demonstrating the advanced capabilities
of the LSTM architecture compared to traditional
maintenance methods in the aircraft industry. Despite
the limitations of classical regression algorithms and
fundamental artificial neural network structures in
capturing long-term relationships in time series,
LSTM models have demonstrated notable efficacy in
learning and maintaining such intricate temporal
patterns. This feature facilitates more precise
predictions of future vibration trends and has the
potential to extend the lifespan of critical aircraft
components by reducing unnecessary maintenance
interventions. Analyses have demonstrated that
LSTM models achieve lower MAE and RMSE
values, indicating that they enhance the accuracy and
reliability of CBM applications. This has been shown
to result in enhanced system reliability, reduced
unexpected failures and decreased maintenance costs
in operational results. In conclusion, the integration
of LSTM architecture into aircraft maintenance
strategies is not only compatible with artificial
intelligence-based predictive maintenance
approaches, but also offers concrete practical gains
for the maintenance optimisation of aircraft systems.
This makes LSTM models optimal for the
implementation of preventive, economical, and
safety-focused maintenance strategies in
contemporary aircraft.
This research makes a significant contribution to
the academic literature by effectively bridging
theoretical principles with real-world implementation
practices, thereby advancing the comprehension and
applicability of advanced CBM strategies in the field
of aircraft engineering. The study demonstrates that
the deployment of LSTM networks enhances
predictive accuracy, particularly in the context of
forecasting future vibration behaviours. In contrast to
traditional statistical models, the proposed LSTM-
based framework provides a scalable and practical
foundation for real-time CBM integration. The LSTM
model has been developed to learn from complex
temporal sequences, thereby offering a data-driven
mechanism to anticipate component-level
degradation. This, in turn, has the effect of
minimising redundant interventions and improving
overall system availability and reliability. These
findings reflect a paradigm shift from conventional
predictive analytics to intelligent maintenance
strategies, enabling more informed, timely and cost-
effective decision-making processes. Consequently,
this study addresses a critical research gap by
providing empirical validation of LSTM's potential to
transform CBM methodologies and establishes the
foundation for future research into AI-enhanced
maintenance planning in aircraft environments.
REFERENCES
Al-Selwi, S. M., Hassan, M. F., Abdulkadir, S. J., Muneer,
A., Sumiea, E. H., Alqushaibi, A., & Ragab, M. G.
(2024). RNN-LSTM: From applications to modeling
ICEEECS 2025 - International Conference on Advances in Electrical, Electronics, Energy, and Computer Sciences
174

techniques and beyond—Systematic review. Journal of
King Saud University - Computer and Information
Sciences, 36(5), 102068.
https://doi.org/10.1016/J.JKSUCI.2024.102068
Choi, J. H., Kim, N. H., & Kogiso, N. (2016). Reliability
for aerospace systems: Methods and applications.
Advances in Mechanical Engineering, 8(11), 1.
https://doi.org/10.1177/1687814016677092;PAGE:ST
RING:ARTICLE/CHAPTER
Cusati, V., Corcione, S., & Memmolo, V. (2021). Impact of
Structural Health Monitoring on Aircraft Operating
Costs by Multidisciplinary Analysis. Sensors (Basel,
Switzerland), 21(20), 6938.
https://doi.org/10.3390/S21206938
Department of Defense. (2024). Condition-Based
Maintenance Plus Guidebook.
https://www.acq.osd.mil/log/MR/cbm+.html
Ernest Yat-Kwan Wong, Stephen E. Gauther, & Simon R.
Goerger. (2006). Condition-Based Maintenance
(CBM): A Working Partnership between Government,
Industry, and Academia.
https://www.researchgate.net/publication/235093552_
Condition-
Based_Maintenance_CBM_A_Working_Partnership_
between_Government_Industry_and_Academia
Hünemohr, D., Litzba, J., & Rahimi, F. (2022). Usage
Monitoring of Helicopter Gearboxes with ADS-B
Flight Data. Aerospace 2022, Vol. 9, Page 647, 9(11),
647. https://doi.org/10.3390/AEROSPACE9110647
J. Lee, H. Qiu, G. Yu, J. Lin, & Rexnord Technical
Services. (2007). IMS, University of Cincinnati
“Bearing Data Set.” https://data.phmsociety.org/nasa/
Kabashkin, I., & Perekrestov, V. (2024). Ecosystem of
Aviation Maintenance: Transition from Aircraft Health
Monitoring to Health Management Based on IoT and
AI Synergy. Applied Sciences 2024, Vol. 14, Page
4394, 14(11), 4394.
https://doi.org/10.3390/APP14114394
Matias, O., Renna, P., Ali, A., Abdelhadi, A., & Linton, A.
L. (2022). Condition-Based Monitoring and
Maintenance: State of the Art Review. Applied Sciences
2022, Vol. 12, Page 688, 12(2), 688.
https://doi.org/10.3390/APP12020688
Ozkat, E. C., Bektas, O., Nielsen, M. J., & la Cour-Harbo,
A. (2023). A data-driven predictive maintenance model
to estimate RUL in a multi-rotor UAS. International
Journal of Micro Air Vehicles, 15.
https://doi.org/10.1177/17568293221150171/ASSET/
19A20BAC-2FBF-4C54-B27B-
555A8CBD2386/ASSETS/IMAGES/LARGE/10.1177
_17568293221150171-FIG13.JPG
Qiu, H., Lee, J., Lin, J., & Yu, G. (2006). Wavelet filter-
based weak signature detection method and its
application on rolling element bearing prognostics.
Journal of Sound and Vibration, 289
(4–5), 1066–1090.
https://doi.org/10.1016/J.JSV.2005.03.007
Quatrini, E., Costantino, F., Di Gravio, G., & Patriarca, R.
(2020). Condition-Based Maintenance—An Extensive
Literature Review. Machines 2020, Vol. 8, Page 31,
8(2), 31. https://doi.org/10.3390/MACHINES8020031
Scott, M. J., Verhagen, W. J. C., Bieber, M. T., &
Marzocca, P. (2022). A Systematic Literature Review
of Predictive Maintenance for Defence Fixed-Wing
Aircraft Sustainment and Operations. Sensors, 22(18).
https://doi.org/10.3390/S22187070
Verhagen, W. J. C., Santos, B. F., Freeman, F., van Kessel,
P., Zarouchas, D., Loutas, T., Yeun, R. C. K., & Heiets,
I. (2023). Condition-Based Maintenance in Aviation:
Challenges and Opportunities. Aerospace 2023, Vol.
10, Page 762, 10(9), 762.
https://doi.org/10.3390/AEROSPACE10090762
Future Vibration Estimation Using LSTM for Condition-Based Maintenance of Aircraft Systems
175
