
Real-Time Waste Detection Using YOLO, SSD, and Faster R-CNN
Integrated with CNN-Based Classification
Lawryan Andrew Darisang, Samuel Krishna Dwisetio, Ivan Sebastian Edbert and Alvina Aulia
Computer Science Department, School of Computer Science, Bina Nusantara University Jakarta, 11480, Indonesia Bina
Nusantara University, Indonesia
Keywords: YOLOv11, SSD, Faster-RCNN, CNN, Real-Time Waste Classification.
Abstract: Substantial amount of unmanaged waste causes serious health and environmental risks, particularly in
Indonesia, where 13.4 million tons were left unmanaged in 2024. However manual waste sorting is inefficient,
labor-intensive, and prone to error, creating an urgent need for automated waste classification systems. This
study proposes a real-time waste classification approach by integrating object detection models and a
Convolutional Neural Network (CNN) classifier with the help of camera vision, through the transfer learning
method. Object detection models YOLOv11, SSD-MobileNetV3, and Faster R-CNN with ResNet50 FPN
were trained on TACO and Trash-ICRA19 datasets, while the CNN classifier with MobileNetV2-based was
trained on the Domestic Waste Classification dataset. The MobileNetV2 classifier achieved 85.02% accuracy
with a macro F1-score of 85%. For object detection models, YOLOv11 shows superior performance achieving
mean Average Precision @.5:.95 of 55.69% with an inference speed of 14.1ms and 71.10 frames per second,
outperforming others. The results indicate that YOLOv11 combined with CNN offers an efficient and accurate
solution for real-time waste classification and scalable waste management applications.
1 INTRODUCTION
Waste is one of the major environmental things the
world is concerned about today. The rise of waste
production is directly influenced by the population
growth that keeps increasing. According to the
Indonesia National Waste Management Information
System (SIPSN) in 2024, there are approximately 33
million tons of garbage was produced. However, only
about 59.82% or 20 million tons of waste were
managed properly. While the remaining 40.18%,
approximately 13.4 million tons of waste were not
managed (Ministry of Environment and Forestry of
Indonesia, 2024). This problem happened due to the
lack of knowledge and public awareness about proper
waste classification, resulting in improper and
inefficient waste disposal. These big piles of
unmanaged waste significantly affect the
environment and public health.
The traditional approaches to sorting waste are no
longer sufficient, because it cannot keep up with the
growth of waste production. These manual
approaches also have drawbacks such as being
inefficient, labor-intensive, and prone to human
errors. Therefore, there is an urgent need to
implement automated waste classification systems to
improve efficiency, accuracy, and reduce operational
costs (Fang et al., 2023).
Advances in Artificial Intelligence (AI) with the
help of camera vision provide promising solutions for
the realization of automated and enhanced waste
classification systems. Convolutional Neural
Network (CNN) provides machines that accurately
classify waste (Haqqi et al., 2024). Various
architectures that have been widely used for object
detection, like SSD (Single Shot Multibox Detector),
Faster R-CNN, and YOLO (You Only Look Once),
can be applied for waste detection (Wahyutama and
Hwang, 2022), (Ma, Wang, and Yu, 2020), (Kulkarni
and Kannamangalam Sundara Raman, 2019).
YOLO is well-known for its quick processing
speed and single-pass object detection, which makes
it appropriate for real time applications requiring
speed, but since it lacks accuracy due to its
prioritizing in speed. In contrast with YOLO, Faster
R-CNN offers good accuracy, but it lacks processing
speed. SSD is like the combination of Faster R-CNN
and YOLO architechture it has better speed than
Faster R-CNN and better accuracy than YOLO
(Dakari Aboyomi and Daniel, 2023). By combining
76
Darisang, L. A., Dwisetio, S. K., Edbert, I. S. and Aulia, A.
Real-Time Waste Detection Using YOLO, SSD, and Faster R-CNN Integrated with CNN-Based Classification.
DOI: 10.5220/0014276000004928
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Innovations in Information and Engineering Technology (RITECH 2025), pages 76-83
ISBN: 978-989-758-784-9
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

object detection architecture with CNN as the
foundation to do the waste classification with the help
of camera vision, it is possible to create a model that
allows real-time detection and classification with
high precision for classifying waste into recyclable
and organic waste.
While these models have been explored
individually, a systematic side-by-side comparison
under real-time conditions for waste management is
notably absent. This study aims to fill that gap by
methodically evaluating YOLO, SSD, and Faster R-
CNN. With the use of camera vision, this study
compares the performance of YOLO, SSD, and Faster
R-CNN models for real-time waste and detection, and
the help of CNN for classification. The key
performance metrics include mean Average Precision
(mAP), inference speed, and frames per second (FPS)
for object detection, and accuracy and F1-score for
classification. The goal is to find the best architecture
for building an accurate, fast, and scalable automated
waste classification system.
2 LITERATURE REVIEW
The development of AI, especially in the areas of
machine learning and computer vision, offers
promising opportunities for automating waste sorting
procedures. Object detection architectures such as
YOLO, SSD, and Faster R-CNN and CNN are among
the many technologies that are being developed for
this purpose, and they are frequently emphasized for
their potential in real-time waste classification
applications. Previous studies have shown that CNN-
based models perform well in classification tasks, but
they struggle to optimize for speed, accuracy, and
computational efficiency for real-world applications
(Dwiatmoko et al., 2024).
Past studies that used YOLO models to classify
plastic waste (Li et al., 2022) evaluated the accuracy
and computational efficiency of several YOLO
versions, ranging from YOLO-11m to YOLO-10n.
While YOLO-10n was faster, it showed a slight trade-
off in classification accuracy, whereas YOLO-11m
showed a high accuracy of 98.03%. This result
implies that YOLO is very fast, especially in real-time
applications; obtaining the ideal speed-accuracy ratio
is still difficult. This problem is critical to waste
management since efficient garbage sorting and
recycling depend on quick, precise classification
(Wahyutama and Hwang, 2022).
Another study that talks about Faster R-CNN
(Yan et al., 2021), a model that is more accurate than
YOLO, particularly in intricate detection situations
with several overlapping objects. The model's
performance in categorizing household waste
products was highlighted in this study, which
produced encouraging findings (Yan et al., 2021). But
the study also showed that, despite its excellent
accuracy, Faster R-CNN has slower inference times
and requires more processing power than YOLO and
SSD. These features make Faster R-CNN less
suitable for real-time applications in settings like
waste sorting, even though they are useful for
achieving high accuracy. As a result, the current
literature clearly illustrates the trade-off between
speed and accuracy (Kulkarni and Kannamangalam
Sundara Raman, 2019).
But the study also showed that, despite its
excellent accuracy, Faster R-CNN has slower
inference times and uses a lot more processing power
than YOLO and SSD. These features make Faster R-
CNN less suitable for real-time applications in
settings like waste sorting, even though they are
helpful in reaching accuracy. As a result, the current
literature clearly illustrates the trade-off between
speed and accuracy (Kulkarni and Kannamangalam
Sundara Raman, 2019).
Furthermore, Single Shot Multibox Detector
(SSD) has also been investigated for waste sorting
because of its capacity to strike a balance between
speed and accuracy (Fang, 2022). SSD has received
recognition for its effectiveness in real-time object
detection since it creates numerous bounding boxes
with different aspect ratios for every feature map
point. Research contrasting SSD with other
architectures, such as Faster R-CNN and YOLO,
frequently notes that while SSD is faster, it
occasionally loses accuracy when dealing with
smaller objects or more complicated waste scenarios
(Ma, Wang, and Yu, 2020).
Despite these developments, a lot of the
researchers are more focused on examining single
models or making comparisons without carefully
examining the critical performance indicators needed
for actual garbage classification systems. For
instance, although some research has concentrated on
enhancing classification accuracy using sophisticated
CNN structures, other studies have attempted to
enhance YOLO or Faster R-CNN to perform better in
dynamic settings. However, research that
systematically evaluates these models across several
crucial performance criteria, including inference
speed, computational resource requirements, and
practical applicability, is still lacking.
These gaps in the literature highlight a more
thorough investigation that directly contrasts YOLO,
SSD, and Faster R-CNN in the context of waste
Real-Time Waste Detection Using YOLO, SSD, and Faster R-CNN Integrated with CNN-Based Classification
77
classification. This study attempts to close the gap
and provide comprehensive information about the
advantages and drawbacks of each model by
methodically assessing them using a variety of
criteria.
3 METHODOLOGY
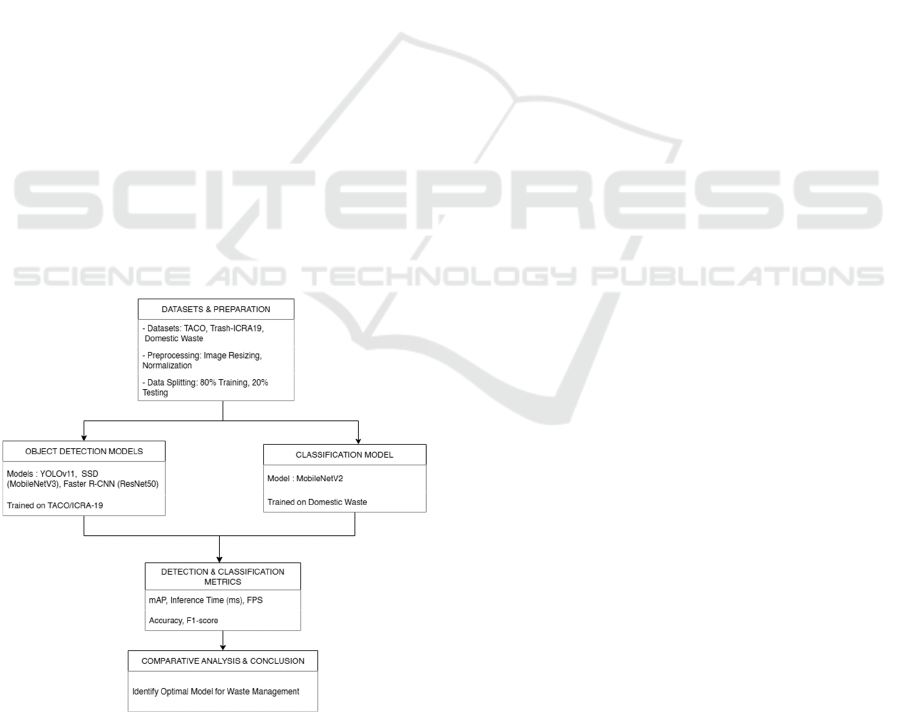
3.1 Research Framework
The methodological framework of this research was
systematically structured to facilitate a rigorous and
reproducible comparison of deep learning models for
real-time waste detection and classification. An
overview of this end-to-end workflow is presented in
a diagram that you can see in Figure 1. The
framework commences with the acquisition and
preprocessing of the designated datasets.
Subsequently, the process diverges into two parallel
tracks: one dedicated to the fine-tuning of three
different well-known object detection architectures
(YOLOv11, SSD, and Faster R-CNN), and another
for the classification model (MobileNetV2). Upon
completion of training, each model is evaluated
against a suite of predefined, task-specific
performance metrics. The framework culminates in a
comparative analysis of these metrics to ascertain the
optimal architecture for the proposed automated
waste management system.
Figure 1. Proposed Research Framework.
3.2
Datasets
This study used a total of three publicly available
datasets. Two datasets, TACO (Trash Annotations in
Context) and Trash-ICRA19, were used to train and
evaluate the object detection models. The other
dataset, the Domestic Waste Classification dataset
from the 209Sontung GitHub repository, was used for
the classification model.
The TACO dataset consisted of approximately
1,500 real-world waste images captured in diverse
environments (Proença and Hua, 2020). These
images were annotated with various common waste
categories, including materials such as metal (e.g.,
cans, foil), plastic (e.g., bottles, caps), and
paper/cardboard (e.g., cartons, tubes). As for Trash-
ICRA19 dataset it consisted of over 7,600 underwater
waste images (Fulton, Hong, and Sattar, 2020). This
dataset specifically focuses on marine litter,
classifying different types of trash found in
underwater settings.
To increase the diversity and robustness of the
object detection models, the two datasets were
combined into a single dataset for model training and
evaluation. Images without annotations were
removed, resulting in a final dataset of 9,077 images
across 13 classes: bio (organic), cloth, fishing, glass,
metal, non-recyclable, paper, plastic, rov (man-made
underwater equipment/robotic parts), rubber,
timestamp, unknown, and wood. Preprocessing
involved resizing all images to 640 × 640 pixels, with
no additional preprocessing steps applied. Finally, the
annotation formats were converted to match the
requirements of each detection model: YOLOv11
required the YOLO TXT format, Faster R-CNN
(ResNet50 + FPN) used the COCO JSON format, and
SSD (with a MobileNetV2 backbone) employed the
TF-Record format.
For the classification model, the dataset consisted
of 3,495 images of waste, categorized into three main
classes: recyclable, organic, and non-organic waste.
Preprocessing involved resizing images to 320 × 320
pixels and applying normalization to scale pixel
values. There was no additional preprocessing or
augmentation applied. This dataset was used to train
and evaluate the classification model (Tung, 2021).
3.3
Model and Architecture
3.3.1 YOLO
YOLO is a one-stage object recognition architecture
that uses a single CNN to predict both bounding box
coordinates and class probabilities directly from full
RITECH 2025 - The International Conference on Research and Innovations in Information and Engineering Technology
78

images in a single forward pass. YOLO can attain
great accuracy and real-time detection performance
with this method. In this study, YOLOv11 is utilized
because it is the most recent version of YOLO,
offering significant improvements over its
predecessors. YOLOv11 presents an anchor-free
detection paradigm, enhanced attention mechanism,
and deeper feature extraction (Alif, 2024). The
architecture consists of several key modules: the
C3k2 Block for efficient feature extraction, SPPF
(Spatial Pyramid Pooling - Fast) for multi-scale
feature aggregation, and Cross Stage Partial with
Spatial Attention (C2PSA) for enhanced spatial
attention. Additionally, the detection part used multi-
scale prediction layers to improve detection
performance across objects of varying sizes,
particularly enhancing accuracy for both small and
large objects (Khanam and Hussain, 2024).
3.3.2 SSD
SSD is an effective one-stage object recognition
architecture that uses feature maps to directly be
forecast bounding boxes and class labels, making it
possible for real-time detection. SSD can recognize
objects of varying sizes by using multiscale feature
maps from different network layers (Fang et al.,
2023)(Ma, Wang, and Yu, 2020).
SSD used Focal Loss to handle class imbalance by
lowering the weight of simple negative samples,
allowing the model to focus on challenging or
unclassified objects. In this study, SSD used
MobileNetV3 as the backbone, which includes depth
wise separable convolutions to reduce computation,
inverted residual structures, linear bottlenecks, and
squeeze-and-excitation blocks. These components
enhance computational efficiency while maintaining
high detection accuracy (Lu et al., 2020).
3.3.3 Faster R-CNN
Faster R-CNN is an efficient two-stage object
detection framework that combines region proposal
generation and object classification. The first stage is
the Region Proposal Network (RPN), which
generates candidate regions directly using a CNN
which enhances the detection process. For precise
object detection and localization, the second stage
uses shared convolutional features to classify and
improve the first-stage suggestions (Nie, Duan, and
Li, 2021)(Fang, 2022).
In this study, Faster R-CNN used ResNet-50 as
the backbone and integrated with Feature Pyramid
Networks to handle objects from different sizes
ranging from small to large. Additionally, for feature
extraction, the Attention Mechanism (AM) enhances
feature selection which increases the accuracy for
small waste objects, and this combination results in
high precision (Nie, Duan, and Li, 2021).
3.3.4 CNN
This study used pre-trained model MobileNetV2 as
the CNN backbone for the waste classification task.
This model was chosen for its lightweight
architecture, efficiency, and its offering good
accuracy. Furthermore, this model is well-suited for
application on environment with limited
computational resources like mobile phones
(Musaev, Anorboev, and Youn, 2025).
MobileNetV2 is a deep learning model that
utilizes an inverted residual framework. This
framework increases the dimensionality of the
convolutional layer before applying depth-wise
convolution to reduce computational cost while
maintaining accuracy. Additionally, it uses linear
bottleneck structure, where the last layer is replaced
with linear activation function to prevent the missing
of important information (Wu et al., 2022).
3.4 Training and Evaluation
All models used in this research are pre-trained
models and utilize transfer learning to fine-tune each
model using the dataset prepared before. TACO
(Trash Annotations in Context) and Trash-ICRA19
datasets are utilized for training the object detection
model, while the Domestic Waste Classification
dataset is utilized for training the classification
model. All the datasets must be pre-processed before
initiating training. For the object detection models, all
the images are resized to 640 x 640 pixels. And for
the classification model, preprocessing is done by
scaling images to 224 x 224 pixels and followed by
applying normalization to scale pixel values.
All datasets are divided into two different sets with
20% for testing and 80% for training. Training runs
50 epochs for all models, implementing early stopping
to prevent overfitting and the use of unnecessary
computation for each model. The evaluation metrics
for object detection models focus on FPS, inference
time and mAP, with the formula (1):
mAP =
1
N
APi
(1)
While classification models focus on accuracy (2)
and f1-score (3) for the evaluation metrics, computed
as:
Real-Time Waste Detection Using YOLO, SSD, and Faster R-CNN Integrated with CNN-Based Classification
79
Accurac
y
=
TP TN
TP TN FP FN
(2)
F1 Score = 2 X
Precision X Recall
Precision Recall
(3)
3.5
Parameter Configuration
To ensure a fair and direct comparison of the models'
architectural performance, a consistent set of
hyperparameters was used for all three models during
the fine-tuning process, as detailed in Table 1.
Table 1. Hyperparameter Configuration for Model Training
Optimizer
Stochastic Gradient
Descent
(
SGD
)
Initial Learnin
g
Rate 0.005
Momentum 0.9
Weight Deca
y
0.0005
Batch Size 15
Epochs 50
By providing each model with the same learning
conditions, any significant differences in
performance can be more confidently attributed to the
inherent strengths and weaknesses of their designs,
rather than variations in the training process.
Stochastic Gradient Descent optimizer was selected
for its proven robustness and stability in fine-tuning
tasks. SGD updates the model’s weights by taking
steps in the direction that most effectively reduces the
training error. For initial learning rate, a value of
0.005 was chosen as it provides a balanced starting
point, allowing the models to learn efficiently without
the risk of instability that a higher rate might cause,
or the slow convergence from a rate that is too low.
The momentum value of 0.9 was used to help the
SGD optimizer accelerate convergence and navigate
complex error landscapes. It helps the optimizer
maintain a consistent direction, leading to faster and
more stable training. Weight decay with of 0.0005
was used to prevent overfitting. This regularization
strategy penalizes high weights in the model,
encouraging it to learn simpler and more
generalizable patterns.
4 RESULT
The chosen models for waste identification and
classification have undergone a 50-epoch training and
fine-tuning procedure
4.1
Waste Classification Model
Performance
The CNN model using pre-trained MobileNetV2
architecture, was evaluated for its performance and
effectiveness in categorizing waste materials. This
model was fine-tuned on the Domestic Waste
Classification dataset, which contains images
categorized as recyclable, organic, and non-organic
waste. The performance of the MobileNetV2 model
is summarized as follows:
• Accuracy: 85.02%
• Macro Average F1-score: 85%
These metrics demonstrate the model's robust
capability to accurately categorize waste items into
their categories.
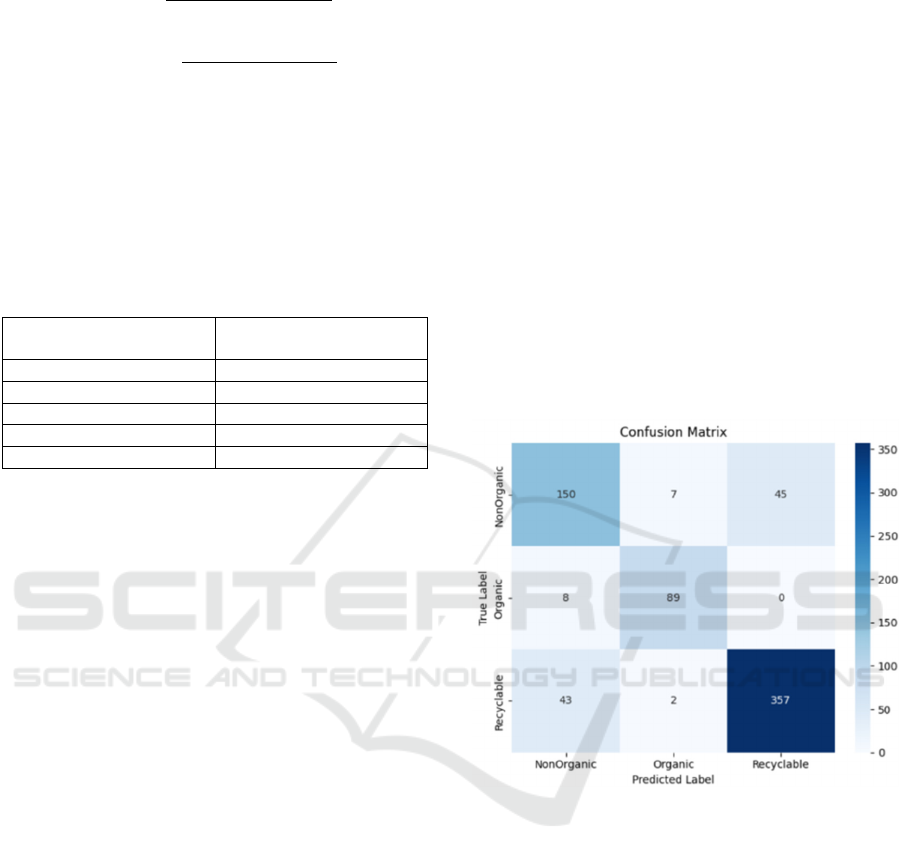
Figure 2. Confusion matrix for the MobileNetV2 model.
The confusion matrix shown in Figure 2, displays
the model's predictions in comparison to the actual
labels. The model was able to achieve particularly
high true positive rates for the 'Organic' and
'Recyclable' classes by identifying 89 out of 97 for
'Organic' items and 357 out of 402 for 'Recyclables'
correctly. However, there was some confusion
between the 'Non-Organic' and 'Recyclable'
categories, with 45 'Non-Organic' incorrectly
identified as 'Recyclable', and 43 'Recyclable'
incorrectly identified as 'Non-Organic'. Although
there are some inter-class confusions, the overall
accuracy of 85.02% shows that MobileNetV2 model
performs classification effectively.
RITECH 2025 - The International Conference on Research and Innovations in Information and Engineering Technology
80
4.2 Object Detection Model
Performance
For the real-time waste detection, these three object
detection architectures were evaluated: YOLOv11,
SSD with a MobileNetV3 backbone, and Faster R-
CNN with a ResNet50 FPN backbone. These models
were fine-tuned and tested on the TACO dataset. The
primary evaluation metrics included mAP at an IoU
threshold range of 0.5:0.95 (mAP@.5:.95), inference
speed (measured in milliseconds), and FPS.
Table 2. Performance Comparison of Object Detection
Models on the Integrated TACO and Trash-ICRA19
Datasets
Model mAP
@.5:.9
5
(
%
)
mAP
@.5
(
%
)
Avg.
Inference
Time
(
ms
)
Avg.
FPS
YOLOv11 55.69 73.34 14.1 71.1
SSD
(MobileNet
V3
b
ackbone
)
47.86 65.99 38.6 25.91
Faster R-
CNN
(ResNet50
FPN
b
ackbone
)
47.86 72.06 87.6 11.41
Table 2 illustrates that YOLOv11 achieved the
highest mAP@.5:.95 score of 55.69% which is the
best overall detection accuracy among others
evaluated models. It also shows an exceptional real-
time performance with the lowest average inference
time of 14.1 ms and the highest average FPS of 71.10.
Faster R-CNN (ResNet50 FPN) achieved the second-
best mAP@.5:.95 with a score of 49.89%.
Nonetheless, its inference speed was significantly
slower, averaging 87.6 ms per image, and it also
recorded the lowest FPS among all at 11.41.
The SSD model utilizing a MobileNetV3
backbone delivered a well-rounded performance,
attaining a mAP@.5:.95 of 47.86%. Having an
intermediate speed with average inference time of
38.6 ms and an FPS of 25.91, positioning SSD
between YOLOv11 and Faster R-CNN in terms of
processing speed. These outcomes emphasize a
balance between detection precision and processing
efficiency. Although YOLOv11 performed
exceptionally well in both areas for this waste
detection task, Faster R-CNN achieved comparable
accuracy but sacrificed speed, while SSD struck a
balance between the two.
4.3 Efficient Combination for
Real-World Deployment
The integration of the high-performing YOLOv11
with the MobileNetV2 classifier creates a synergistic
and highly efficient end-to-end pipeline.
MobileNetV2 was explicitly chosen for its
lightweight architecture and suitability for
environments with limited computational resources.
This two-step process—fast, accurate detection by
YOLOv11 followed by efficient classification by
MobileNetV2—forms a complete system optimized
for both speed and accuracy.
From a practical standpoint, these results directly
address real-world deployment concerns. The 14.1
ms latency of YOLOv11 is critical for real-time
systems where instantaneous decisions are required.
YOLOv11 ability to process 71.10 FPS ensures that
it can handle standard high-speed video feeds without
missing items. The low computational footprint of the
combined YOLOv11 and MobileNetV2 models
makes the system viable for real world deployment
on cost-effective computing devices.
5 CONCLUSION
With the goal of finding the best architecture for
automated waste management systems, this study
compares and analyzes the performance of different
deep learning models for real-time waste
classification and detection using computer vision.
The study focused on a CNN-based approach for
waste classification and evaluated three leading
object detection architectures: YOLOv11, SSD (with
a MobileNetV3 backbone), and Faster R-CNN (with
a ResNet50 FPN backbone). These architectures were
assessed on key metrics, including accuracy,
mAP@.5:.95, inference speed, and FPS. The
experimental results showed that the fine-tuned
MobileNetV2 model performed well on the Domestic
Waste Classification dataset, achieving an accuracy
of 85.02% and a macro F1-score of 0.85. This
demonstrates the model's capability to effectively
categorize waste as organic, recyclable, and non-
organic.
In the comparative study of object detection
models on the TACO dataset, YOLOv11 stood out as
the most efficient model overall. It achieved the
highest detection accuracy with a mAP@.5:.95 of
55.69% and showed exceptional real-time processing
performance, as indicated by an average inference
time of 14.1 ms and an average FPS of 71.10. These
results show the balance between computational
efficiency and detection precision, a critical
Real-Time Waste Detection Using YOLO, SSD, and Faster R-CNN Integrated with CNN-Based Classification
81

consideration for real-life implementation. Such
evaluation across various performance criteria
addresses gaps and shortcomings in previous studies,
which often focused on individual models or
restricted comparison metrics.
Based on these results, YOLOv11 was chosen as
the most suitable object detection model, as it
outperformed the other architectures. It was then
integrated with a CNN classification model using a
MobileNetV2 backbone, which was selected for its
lightweight architecture and suitability for
deployment in limited computational resource
environment. These models can be used in smart
recycling bins, automated waste-sorting facilities,
and mobile apps. Such implementations could
immediately help Indonesia's waste management
policy by enhancing waste segregation efficiency and
increasing the proportion of properly managed waste
beyond the current rate of around 60%. This approach
would also contribute to broader sustainability goals,
such as SDG 11: Sustainable Cities and
Communities, while aligning with smart city
development initiatives.
5.1 Limitations and Future Work
Although this research offers valuable insights, it is
important to recognize its limitations. The
performance of the models can be affected by the size
and variety of the training datasets (TACO, ICRA-19,
and Domestic Waste Classification). Future work
may include augmenting these datasets with more
diverse waste items and complex environmental
conditions (e.g., varying lighting, occlusions) to
improve model robustness and generalization.
Additional exploration of hyperparameter
optimization for each model or examining recent
architectures could also lead to performance
improvements. Furthermore, effective execution of
such a system would require hardware integration and
creating a comprehensive workflow for real-world
functionality, including the mechanical aspects of
waste sorting activated by the vision system output.
Exploring ensemble methods or model quantization
techniques for deployment on devices with limited
resources could also be beneficial for future studies.
ACKNOWLEDGEMENTS
During the preparation of this work, the authors used
generative AI tools for language refinement. After
using these tools, the authors reviewed and took full
responsibility for the content of the publication.
REFERENCES
Alif, M. A. R. (2024). YOLOv11 for vehicle detection:
advancements, performance, and applications in
intelligent transportation systems.
Dakari Aboyomi, D. and Daniel, C. (2023). A comparative
analysis of modern object detection algorithms: yolo vs.
ssd vs. faster r-cnn. ITEJ 8:96–106.
Dwiatmoko, F., Utami, D., Sivi, N. A., Nahdlatul, U., and
Lampung, U. (2024). Image Classification of Organic
and Non-Organic Waste Using CNN (Convolutional
Neural Network) Algorithm [In Indonesian].
Fang, B., Yu, J., Chen, Z., Osman, A. I., Farghali, M., Ihara,
I., Hamza, E. H., Rooney, D. W., and Yap, P. S. (2023).
Artificial intelligence for waste management in smart
cities: a review.
Fang, J. (2022). SSD-based Lightweight Recyclable
Garbage Target Detection Algorithm. Innovation in
Science and Technology 1(1). doi:
10.56397/ist.2022.08.05.
Fulton, M. S., Hong, J., and Sattar, J. (2020). Trash-
ICRA19: a bounding box labeled dataset of underwater
trash. Available at: https://doi.org/10.13020/x0qn-y082
(accessed June 15, 2025).
Haqqi, M., Rochmah, L., Dwi Safitri, A., Adhi Pratama, R.,
and Tarwoto (2024). Implementation of machine
learning to identify types of waste using cnn algorithm.
Khanam, R. and Hussain, M. (2024). YOLOv11: an
overview of the key architectural enhancements.
Kulkarni, H. N. and Kannamangalam Sundara Raman, N.
(2019). Waste object detection and classification.
Li, J., Chen, J., Sheng, B., Li, P., Yang, P., Feng, D. D., and
Qi, J. (2022). Automatic Detection and Classification
System of Domestic Waste via Multimodel Cascaded
Convolutional Neural Network. IEEE Transactions on
Industrial Informatics 18(1):163–173. doi:
10.1109/TII.2021.3085669.
Lu, H., Li, C., Chen, W., and Jiang, Z. (2020). A single shot
multibox detector based on welding operation method
for biometrics recognition in smart cities. Pattern
Recognition Letters 140:295–302. doi:
10.1016/j.patrec.2020.10.016.
Ma, W., Wang, X., and Yu, J. (2020). A lightweight feature
fusion single shot multibox detector for garbage
detection. IEEE Access 8:188577–188586. doi:
10.1109/ACCESS.2020.3031990.
Ministry of Environment and Forestry of Indonesia (2024).
National Waste Management Information System
(SIPSN). Available at:
https://sipsn.menlhk.go.id/sipsn/ (accessed April 3,
2025) [In Indonesian].
Musaev, A., Anorboev, A., and Youn, J. M. (2025).
Optimized epoch selection ensemble: integrating
custom cnn and fine-tuned mobilenetv2 for malimg
dataset classification. IEEE Access. doi:
10.1109/ACCESS.2025.3547791.
Nie, Z., Duan, W., and Li, X. (2021). Domestic garbage
recognition and detection based on Faster R-CNN. In:
Journal of Physics: Conference Series.
RITECH 2025 - The International Conference on Research and Innovations in Information and Engineering Technology
82

Proença, P. and Hua, Y. (2020). TACO: Trash Annotations
in Context Dataset.
Tung, S. (2021). Domestic Waste Classification Dataset.
Wahyutama, A. B. and Hwang, M. (2022). Yolo-based
object detection for separate collection of recyclables
and capacity monitoring of trash bins. Electronics
(Switzerland) 11(9). doi: 10.3390/electronics11091323.
Wu, C., Zhang, J., Yu, X., and Lei, X. (2022). A novel
capsnet neural network based on mobilenetv2 structure
for robot image classification.
Yan, D., Li, G., Li, X., Zhang, H., Lei, H., Lu, K., Cheng,
M., and Zhu, F. (2021). An improved faster r-cnn
method to detect tailings ponds from high-resolution
remote sensing images. Remote Sensing 13(11). doi:
10.3390/rs13112052.
Real-Time Waste Detection Using YOLO, SSD, and Faster R-CNN Integrated with CNN-Based Classification
83
