
Detection of Pomelo in Overlapping Conditions Using Drones
Mahdaniar
a
and Indrabayu
*
b
Department of Informatics Hasanuddin University Makassar, Indonesia
Keywords: Detection, Pomelo, YOLOv11, CLAHE, Overlapping.
Abstract: Detection of Pomelo on trees in overlapping conditions and the similarity of colors between fruits and leaves
are the main challenges in the implementation of smart farming systems. This study aims to develop an
automatic detection system of Pomelo using a drone with a computer vision approach based on the YOLOv11
algorithm combined with the CLAHE (Contrast Limited Adaptive Histogram Equalization) image contrast
enhancement technique. The research methodology includes image data collection, pre-processing, data
labeling, model training, and evaluation using mAP, precision and recall. The initial results showed that
YOLOv11 provide suboptimal performance in the detection process, resulting in the result, precision: 92%,
recall: 81%, mAP50: 90%, mAP50-95: 72%. After YOLOv11 is integrated with CLAHE, the performance
has been improved, achieving precision: 92%, recall: 84%, mAP50: 95%, mAP50-95: 67%.
1 INTRODUCTION
The Industrial Revolution 4.0 encourages the
transformation of automation systems that are
smarter, more efficient, and sustainable, driven by
the development of digital technology, including in
agriculture. One of the leading agricultural
commodities is horticulture (Indrabayu et al., 2019a).
Horticultural crops that have the potential to be
developed in Indonesia are citrus commodities.
Citrus (Citrus Sp) is one of the horticultural
commodities that functions as a source of national
income for the country, the fruit originating from
Asia that can grow in tropical and subtropical areas
(Addi et al., 2021). This is marked by the increasing
consumption of pomelos in Indonesia from year to
year. In general, pomelos are a o vitamin C source
useful for human health. Pomelo juice contains 40-
70 mg of vitamin C per 100 g (Khattak et al., 2021).
In addition to pomelo flesh, the properties and
benefits of pomelos are also contained in pomelo
peels. The content of pomelo peel has benefits
ranging from sedatives, skin smoothers, mosquito
repellent (Adelina et al., 2020) (Sugadev et al.,
2020).
The availability of computer vision technology,
supported by the improvement of computer hardware
capabilities, has become a major supporting factor in
a
https://orcid.org/0009-0005-3135-5861
b
https://orcid.org/0000-0003-2026-1809
the development of automated farming systems.
These systems are designed to solve various
problems in the agricultural sector with high level of
flexibility, effectiveness, and efficiency. This
development has also led to an increase in the
number of studies focusing on automatic fruit
detection (Indrabayu et al., 2019b).
Previous research, a system for classifying ripe,
immature and rotten pomelos quickly and efficiently
by 335 Images taken using a 1024x768 pixel
resolution digital camera are stored in JPG format
using Naïve Bayes, Decision Tree and Neural
Network methods (Wajid et al., 2018), automatic
classification of pomelos at the fruit packaging
factory with 120 images and three categories of
pomelos, namely Bam, Payvandi, Thomson using the
Gradient Descent, Stochastic Gradient Descent
(SGD), RMS Prop and Adam methods, the results of
the study obtained the best SGD method with an
optimization of 0.95 (Pathak et al., 2020) detection
lime fruit on a tree for estimation of yield using the
YOLOv5-CS method using a dataset of 3000 images
with a detection accuracy of 96.7% (Lyu
et al.,
2022a
)
, pomelo fruit color detection based on frame
selection detection on 811 pomelo fruit images using
the YOLOv5 method obtained an accuracy rate of
99.4% [9], system for the classification of pomelo
quality based on the characteristics specified on 953
Mahdaniar, and Indrabayu,
Detection of Pomelo in Overlapping Conditions Using Drones.
DOI: 10.5220/0014266900004928
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Innovations in Information and Engineering Technology (RITECH 2025), pages 25-31
ISBN: 978-989-758-784-9
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
25
images of pomelo leaves using Convolutional Neural
Network (CNN) with a 93.8% accuracy rate (Asriny
et al., 2020) (Xu et al., 2023a), detection of leaf-
covered raspberry fruits, which interfere with crop
estimation and garden efficiency, with the limitations
of traditional technology and challenges in the use of
hyperspectral technology using Logistic Regression
(LR), Random Forest (RF) methods (Chen et al.,
2024), and detection of tomato fruit ripeness under
conditions of changing lighting, obstruction, and
fruit overlap, as well as models that are too large for
limited devices using the GFS-YOLOv11 method
obtained results of Precision (P): 92.0%, Recall (R):
86.8%, mAP50: 93.4%, mAP50-95: 83.6% (Wei et
al., 2024).
Currently, most research focuses on improving
detection by color and from different fruit targets.
(Indrabayu et al., 2017) (Janowski et al., 2021),
however, studies related to accurate detection of
green pomelos in gardens have received less
attention because they are complicated and not easy,
especially the detection of green pomelos, which are
very important for predicting garden yields (Lyu et
al., 2022b).
Fruit detection with deep learning can be done
using the computer vision method (Xu et al., 2023b),
You Only Look Once (YOLO) is a single-stage
object detector that has demonstrated excellent
performance for detecting with high precision and
accuracy (Liu et al., 2018), and with the most
developed versions. YOLOv11, the latest model
from Ultralytics, demonstrates superior performance
on a wide range of computer vision tasks, including
object detection, instance segmentation, feature
extraction, pose estimation, object tracking, and
classification, to real-time object detection
(Hidayatullah et al., 2025). Studies to address the
problem of low detection accuracy in complex
plantation environments (such as varying lighting
conditions, branch and leaf occlusion, fruit overlap,
and small targets) used YOLOv11 in detecting
occluded pears and the accuracy results showed
precision, recall, mAP50, and mAP50–95 values of
96.3%, 84.2%, 92.1%, and 80.2%, respectively
[Zhang et al., 2025).
Based on the observations in the pomelo field, the
main obstacle is difficult to distinguish the color of
pomelos and leaves, particularly in conditions of
uneven illumination, overlapping fruits, or leaf
occlusion. This makes manual detection difficult,
time-consuming, and lowers the accuracy of fruit
ripeness classification, which impacts harvest
efficiency. To overcome this problem, a pomelo
detection and classification system was developed
using the YOLOv11 algorithm with the addition of
CLAHE, to support smart farming practices and
improve sustainability of agricultural production.
Beyond model development, the proposed
system can be deployed on drones to enable real-time
monitoring in orchards. Running inference on drones
requires lightweight models that can operate under
limited computational resources. Previous work has
shown that compact models such as YOLOv4-tiny
achieve significantly faster inference while
maintaining satisfactory accuracy, making them
suitable for onboard drone applications (Mpouziotas
et al., 2023). This integration ensures practical field
implementation while enhancing the scalability and
efficiency of precision agriculture systems.
2 MATERIALS AND METHODS
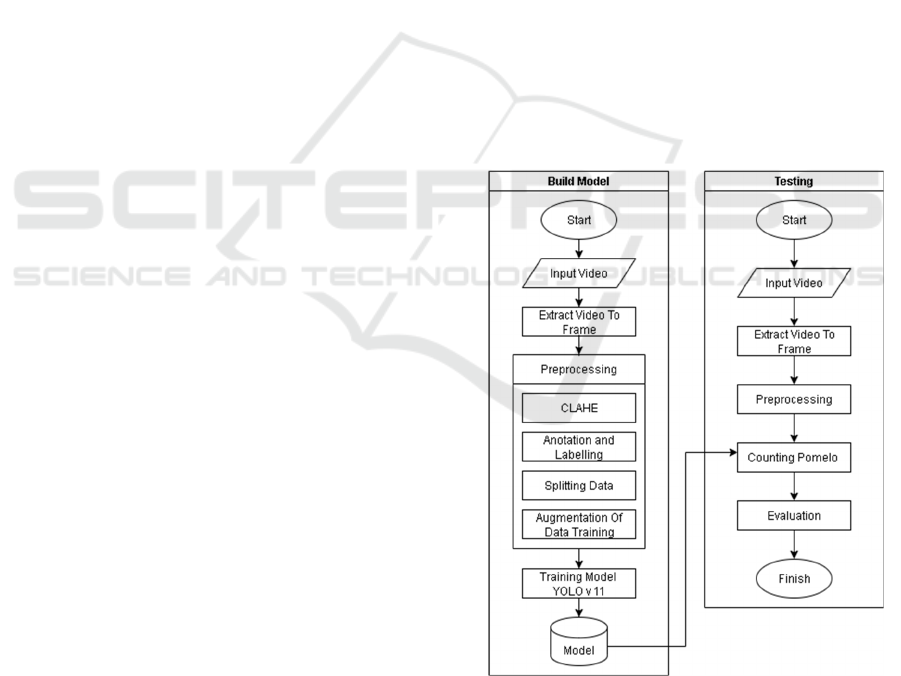
The entire research process, from data preparation to
fruit detection, is illustrated in the flowchart in
Figure 1. This flowchart provides a comprehensive
overview of the methodological workflow
implemented in this study. Here is the workflow
process from 1 to 8.
Figure 1: System Design Flow.
The dataset was partitioned into three subsets,
consisting of 1,301 images for training, 124 images
for validation, and 62 images for testing. However,
the relatively small percentage of validation and
RITECH 2025 - The International Conference on Research and Innovations in Information and Engineering Technology
26

testing data may introduce bias in the evaluation
results, as limited samples can lead the model to
appear to perform well while its performance may
not generalize to more diverse real-world conditions
(Brigato et al., 2020). The picture above illustrates
the design of the proposed system for detecting
pomelos on trees in challenging conditions where the
color and edges of pomelos are similar to those of
leaves, which can be divided into several main stages
as follows:
2.1 Video Input and Extract Video
Frames
The system starts by receiving video as input. This
video likely contains footage that shows pomelos in
various conditions, such as covered in leaves or
stacked. From the given video, the system extracts
the frame (frame-by-frame extraction). It means that
the video is broken down into several static images
so that it can be further processed in the next stage.
2.2 Preprocessing
After the frame is extracted, a preprocessing stage is
carried out to improve the quality of the data before it
is fed into the detection model. One of the methods
mentioned in the diagram is CLAHE (Contrast
Limited Adaptive Histogram Equalization), which is
useful for improving image contrast, especially in
suboptimal lighting conditions.
In this study, CLAHE was used with the
parameters Clip Limit 2.0 and Tile Grid Size (32, 32).
Clip Limit 2.0 controls the extent to which contrast is
enhanced. This value was chosen because it provides
a significant contrast enhancement without causing
excessive effects such as the appearance of bright
spots (noise amplification). Meanwhile, Tile Grid
Size (32, 32) determines the size of the image division
grid. With this size, the image is divided into small
blocks with sufficient detail so that local contrast in
certain areas can be enhanced. If the grid is too small,
the result can increase noise, while a grid that is too
large actually makes important details less visible.
The combination of these two parameters allows
CLAHE to produce images with clearer details, thus
helping object detection models like YOLO to
recognize oranges more accurately.
(a) (b)
Figure 2: Sample dataset (a) before applying CLAHE and
(b) after applying CLAHE
2.3 Annotations
Data annotation refers to the process of labelling or
adding information to different types of data,
including text, images, and videos. At this stage, the
processed frames are manually or semi-automatically
annotated to mark the pomelo object. This annotation
process is important to properly train the pomelo
detection model.
2.4 Data Splitting
Data splitting is a method to divide a dataset into three
parts: data training, validation, and testing. It is one
of several factors that affects the performance of
model. The proportions used were 70% for the
training set, 20% for the test set and 10% for the
validation set.
2.5 Training Model
The pomelo detection model was trained using
YOLO (You Only Look Once), precisely the version
of YOLOv11 mentioned in the diagram. This
algorithm works by processing an image only once
and immediately generating predictions in the form of
bounding box locations, confidence scores, and
object classes. YOLOv11 introduces significant
improvements to its architecture, such as a more
efficient backbone for feature extraction, a spatial
attention module for capturing details of both small
and large objects, and an anchor-free and decoupled
detection head, resulting in more stable, faster, and
more accurate predictions. These advantages make
YOLOv11 highly effective for detecting oranges
under various conditions, such as when the fruit is
close together, covered by leaves, or in less than ideal
lighting, making it highly suitable for automated fruit
detection and counting tasks.
Detection of Pomelo in Overlapping Conditions Using Drones
27
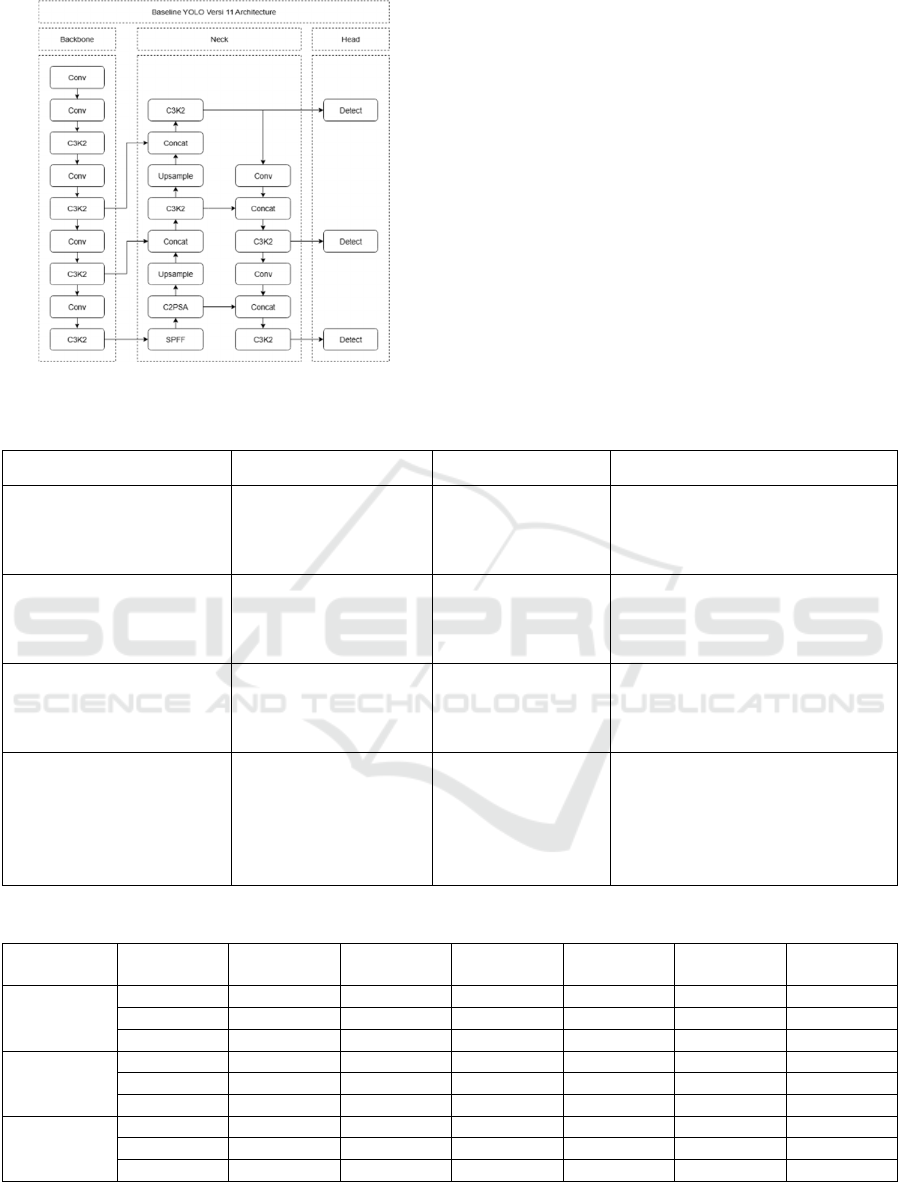
Figure 3: YOLOv11 detection architecture.
The YOLOv11 architecture consists of three
main parts: the backbone, the neck, and the head. The
backbone extracts feature from the input image
through convolutional layers and C3K2 blocks,
which efficiently capture visual patterns. Feature
from the backbone are then processed in the neck,
which combines information from multiple scales
with unsampled and concat operations, as well as
SPPF and C2PSA modules to expand the spatial
context and emphasize important areas. The results of
this processing are forwarded to the anchor-free,
decoupled head, resulting in more stable class and
bounding box location predictions. The head feature
three detection branches at different scales, allowing
YOLOv11 to detect small, medium, and large objects
with high accuracy.
Table 1: Comparison of this study with previous studies.
Study / Method Dataset / Target Approach Reported Performance
Anis Ilyana et al., 2025 Coffee YOLO11
Ripe fruit: mAP50 = 77.4%,
Precision = 64.5%, Recall = 81.2%
Half-ripe fruit: mAP50 = 69.5%,
Precision = 62.4%, Recall = 67.9%
Dhungana, P et al., 2025 subsea pipeline
YOLOv8n and
YOLOv11n+CLAHE
YOLOv11n without enhancement:
mIoU = 70.98%, Dice = 81.29%
YOLOv11n with CLAHE: mIoU =
70.48%, Dice = 80.77%
Sapkota et al., 2025 Apple
YOLOv11 and
CBAM
Result Trunk: 83% precision (with
CBAM) vs 80% (without CBAM).
Result Branch: 75% precision (with
CBAM) vs 73% (tanpa CBAM)
Ours Pomelo
YOLOv11 and
CLAHE
Best performance YOLOv11
without CLAHE: Precision = 85%,
Recall = 56%, mAP50 = 72%.
Best performance YOLOv11 with
CLAHE: Precision = 83,8%, Recall
= 78,2%, mAP50 = 85,1%.
Table 2: Configuration of the training model.
Dataset Epoch Precision Recall Loss Train
Loss
Validation
mAP 50 mAP 50-95
YOLOV8
100 0.7200 0.5400 0.8607 0.9366 0.6955 0.5014
200 0.8300 0.5133 0.8755 0.9122 0.7144 0.5288
300 08009 0.4703 0.8679 0.9324 0.6700 0.5000
Baseline
(YOLOV11)
100 0.7353 0.5603 0.9435 0.9558 0.7019 0.5185
200 0.8502 0.5377 0.9072 0.9393 0.7203 0.5387
300 0.8124 0.4889 0.9021 0.9545 0.6740 0.5087
CLAHE +
YOLOV11
100 0.7851 0.7795 1.0578 0.9916 0.8379 0.5626
200 0.8233 0.7821 0.9950 0.9707 0.8471 0.5579
300 0.8385 0.7665 0.9906 0.9677 0.8506 0.5741
RITECH 2025 - The International Conference on Research and Innovations in Information and Engineering Technology
28
2.6 Evaluation
After the model is trained, the evaluation stage aims
to assess its performance in detecting pomelos. The
assessment is conducted using metrics such as mAP
(mean Average Precision) to measure how well the
model can recognize objects in the image. In addition,
a confusion matrix is employed to calculate precision
and recall, providing a more detailed overview of the
model’s ability to distinguish between correct and
incorrect detections.
2.7 Build Model Testing
The trained models were tested with new videos to
see how well the models could detect pomelos in
more real conditions. These trials aim to measure the
reliability of the model before it is implemented in a
real environment.
3 RESULTS AND DISCUSSION
3.1 Training Perfomance of Yolov11
and (Yolov11 + Clahe)
In this study, the YOLOv11 model was trained with
parameter configurations designed to balance
convergence speed and generalization capabilities.
The initial learning rate was set at 0.01 with a gradual
decrease scheme to maintain weight update stability
during the training process. A momentum parameter
of 0.937 was applied to accelerate convergence by
utilizing the previous gradient direction, while a
weight decay of 0.0005 was used as a regularization
mechanism to reduce the risk of overfitting.
Furthermore, a batch size of 16 was selected
considering the limitations of CPU-based computing,
while the training process was carried out for 300
epochs so that the model had the optimal opportunity
to achieve the best performance. These parameters
were used consistently in both the baseline YOLOv11
model training and the YOLOv11 model with the
CLAHE method to ensure a fair comparison in
performance evaluation.
Table 1 Based on the comparison table, it can be
concluded that each study produced different
performance outcomes due to variations in research
objects, dataset conditions, and applied methods. Anis
Ilyana et al. (2025) demonstrated that the ripeness
level of coffee significantly affects detection accuracy,
with ripe fruits yielding better results than half-ripe
fruits. Dhungana et al. (2025) showed that the
application of CLAHE in subsea pipeline detection
does not always provide benefits, and in fact, slightly
reduced performance compared to results without
CLAHE. Meanwhile, Sapkota et al. (2025) proved that
the addition of the CBAM module improved detection
precision for apples, particularly in more complex
areas such as the trunk and branches.
In this study, the use of CLAHE with YOLOv11
showed a significant improvement in recall and
mAP50 for pomelo detection. This indicates that
CLAHE helps the model identify more objects that
might otherwise be difficult to detect, albeit with a
slight compromise in prediction precision. Overall,
this comparison highlights that the effectiveness of
additional methods such as CLAHE or CBAM largely
depends on the type of object, image quality, and
dataset characteristics.
The table 2 shows the results of the evaluation of
the YOLOv11 model on two types of datasets: original
and those that have been processed using CLAHE.
The model with the original dataset yielded the highest
precision off 0.8502 and the 50th mAP of 0.72032 at
the 200th epoch, but the recall was low (0.5377),
indicating many undetected objects.
.In contrast, the use of CLAHE significantly
improves performance. Precision and recall were
more stable, reaching 0.8385 and 0.7665, respectively,
on the 300th epoch. The values of mAP 50 and mAP
50-95 were also higher, at 0.8506 and 0.5741. These
results prove that CLAHE preprocessing helps
improve the detection of low- contrast objects, making
the model more accurate and reliable
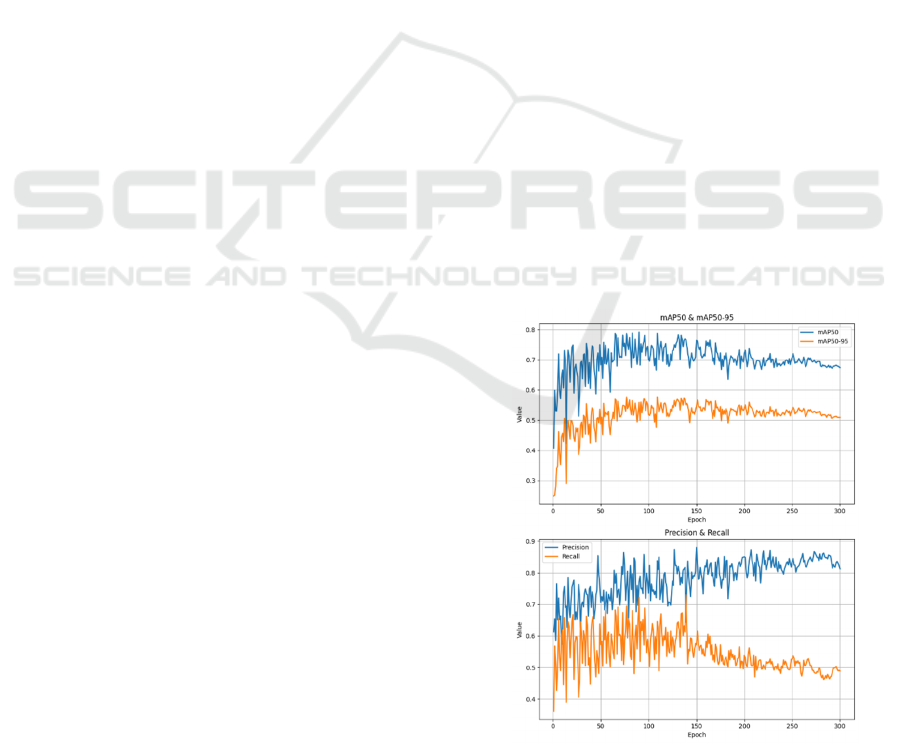
Figure 4: Yolov11 training results graph (mAP 50, mAP 50-
95, precision, and recall) with 300 epochs.
Detection of Pomelo in Overlapping Conditions Using Drones
29

Figure 5: Graph of Yolov11+ Clahe training results (mAP
50, mAP 50-95, precision, and recall) with 300 epochs.
3.2 Testing Performance of Yolov11
dan (Yolov11 + Clahe)
The table 3 shows the results of the evaluation of the
YOLOv11 model on two types of datasets: original
and those that have been processed using CLAHE.
The model with the original dataset yielded the
highest precision of 0.8502 and the 50th mAP of
0.72032 at the 200th epoch, but the recall was low
(0.5377), indicating many undetected objects.
In contrast, the use of CLAHE significantly
improves performance. Precision and recall were
more stable, reaching 0.8385 and 0.7665 respectively
on the 300th epoch. The values of mAP 50 and mAP
50-95 were also higher, at 0.8506 and 0.5741. These
results prove that CLAHE preprocessing helps
improve the detection of low-contrast objects, making
the model more accurate and reliable.
𝑃𝑟𝑒𝑐𝑖𝑠𝑖𝑜𝑛
𝑇𝑃
𝑇𝑃
𝐹𝑃
(1)
𝑅𝑒𝑐𝑎𝑙𝑙
𝑇𝑃
𝑇𝑃
𝐹𝑁
(2)
Explanation:
FN = The model fails to detect an object even though
it exists.
TP = The model successfully
detects an object and the object does indeed exist.
TN = The model does not detect objects, and they do
not exist.
FP = The model detects an object when it doesn't
exist.
Table 3: Testing Configuration.
Dataset
Baseline
(
Yolov8
)
Baseline
(
Yolov11
)
Clahe +
Yolov11
TP 315 328 412
FP 16 11 113
FN 145 118 34
Precision 0.921 0.929 0.921
Recall 0.803 0.815 0.841
mAP 50 0.894 0.907 0.936
mAP 50-
95
0.717
0.721 0.67
4 CONCLUSIONS
This research successfully developed a pomelo
detection system on trees using the YOLOv11
algorithm combined with the CLAHE contrast
enhancement method. The results of the experiment
showed that preprocessing using CLAHE was able to
improve the accuracy of fruit detection, especially in
conditions of overlap and color similarity between
fruits and leaves. The increased mAP, precision, and
recall values after the use of CLAHE prove the
effectiveness of this approach in dealing with
challenges in complex plantation environments. This
system can be a supporting solution in the
implementation of smart farming, especially to
improve the efficiency and accuracy of the automatic
pomelo harvesting process.
ACKNOWLEDGEMENTS
The authors would like to thank the Master’s Program
in Informatics Engineering, Hasanuddin University,
and the Artificial Intelligent and Multimedia
Processing (AIMP) Thematic Research Group for
their support and facilities during this research. The
authors also acknowledge colleagues who provided
constructive feedback and assistance throughout the
research process. In addition, the authors
acknowledge the use of a generative AI tool in
improving the clarity and grammar of this
manuscript. All contents, analyses, and conclusions
remain the sole responsibility of the authors.
RITECH 2025 - The International Conference on Research and Innovations in Information and Engineering Technology
30

REFERENCES
Addi, A. Elbouzidi, M. Abid, D. Tungmunnithum, A.
Elamrani, and C. Hano, “An Overview of Bioactive
Flavonoids from Pomelos,” Appl. Sci., vol. 12, no. 1, p.
29, Dec. 2021, doi: 10.3390/app12010029.
Adelina and E. Adelina, “Identification of Morphology and
Anatomy of Local Pomelos (Citrus sp) in Doda Village
and Lempe Village, Central Lore District, Poso
Regency.”
Asriny, S. Rani, and A. F. Hidayatullah, “Pomelo Fruit
Images Classification using Convolutional Neural
Networks,” IOP Conf. Ser. Mater. Sci. Eng., vol. 803,
no. 1, p. 012020, Apr. 2020, doi: 10.1088/1757-
899x/803/1/012020.
Brigato, L., & Iocchi, L. (2021, January). A close look at
deep learning with small data. In 2020 25th
international conference on pattern recognition
(ICPR) (pp. 2490-2497). IEEE.
Chen, J. Wang, R. Xi, and Z. Ren, “Analysis of Leaf cover
on Raspberry Fruits Based on Hyperspectral
Techniques Combined with Machine Learning
Models,” Jul. 15, 2024, Springer Science and Business
Media LLC. doi: 10.21203/rs.3.rs-4607290/v1.
Dhungana, P., Fresta, M., Tamrakar, N., & Dhungana, H.
(2025, Juni 30). YOLO-Based Pipeline Monitoring in
Challenging Visual Environments
(arXiv:2507.02967v1).
https://doi.org/10.48550/arXiv.2507.02967
Hidayatullah, N. Syakrani, M. R. Sholahuddin, T. Gelar,
and R. Tubagus, “YOLOv8 to YOLO11: A
Comprehensive Architecture In-depth Comparative
Review.”
Ilyana, A., Nurdin, N., & Maryana, M. (2025). Real-Time
Detection of Coffee Cherry Ripeness Using YOLOv11.
Journal of Applied Informatics and Computing, 9(4).
https://doi.org/10.30871/jaic.v9i4.9735.
Indrabayu, Mar’atuttahirah, and I. S. Areni, “Automatic
Counting of Chili Ripeness on Computer Vision for
Industri 4.0,” in 2019 IEEE International Conference
on Industry 4.0, Artificial Intelligence, and
Communications Technology (IAICT), BALI,
Indonesia: IEEE, Jul. 2019, pp. 14–18, doi:
10.1109/iciaict.2019.8784858.
Indrabayu, A. R. Fatmasari, and I. Nurtanio, “A Colour
Space Based Detection for Cervical Cancer Using
Fuzzy C-Means Clustering,” in Proceedings of the 6th
International Conference on Bioinformatics and
Biomedical Science, Singapore: ACM, Jun. 2017, pp.
137–141, doi: 10.1145/3121138.3121196.
Janowski, R. Kaźmierczak, C. Kowalczyk, and J. Szulwic,
“Detecting Apples in the Wild: Potential for Harvest
Quantity Estimation,” Sustainability, vol. 13, no. 14, p.
8054, Jul. 2021, doi: 10.3390/su13148054.
Khattak et al., “Automatic Detection of Pomelo and Leaves
Diseases Using Deep Neural Network Model,” IEEE
Access, vol. 9, pp. 112942–112954, 2021, doi:
10.1109/access.2021.3096895.
Liu, Y. Tao, J. Liang, K. Li, and Y. Chen, “Object Detection
Based on YOLO Network.”
Lyu, R. Li, Y. Zhao, Z. Li, R. Fan, and S. Liu, “Green Citrus
Detection and Counting in Orchards Based on
YOLOv5-CS and AI Edge System,” Sensors, vol. 22,
no. 2, p. 576, Jan. 2022, doi: 10.3390/s22020576.
Mpouziotas, D., Karvelis, P., Tsoulos, I., & Stylios, C.
(2023). Automated wildlife bird detection from drone
footage using computer vision techniques. Applied
Sciences, 13(13), 7787.
Pathak, H. Gangwar, and A. S. Jalal, “Performance
Analysis of Gradient Descent Methods for
Classification of Pomelos using Deep Neural
Network,” in 2020 7th International Conference on
Computing for Sustainable Global Development
(INDIACom), New Delhi, India: IEEE, Mar. 2020, pp.
68–72, doi: 10.23919/indiacom49435.2020.9083723.
Sapkota, R., & Karkee, M. (2025, Januari 26). Comparing
YOLOv11 and YOLOv8 for instance segmentation of
occluded and non-occluded immature green fruits in
complex orchard environment (arXiv:2410.19869v3).
https://doi.org/10.48550/arXiv.2410.19869
Sugadev, K. Sucharitha, I. R. Sheeba, and B. Velan,
“Computer vision based automated billing system for
fruit stores,” in 2020 Third International Conference on
Smart Systems and Inventive Technology (ICSSIT),
Tirunelveli, India: IEEE, Aug. 2020, pp. 1337–1342,
doi: 10.1109/icssit48917.2020.9214101.
Wajid, N. K. Singh, P. Junjun, and M. A. Mughal,
“Recognition of Ripe, Unripe and Scaled Condition of
Pomelo Citrus Based on Decision Tree Classification.”
Wei et al., “GFS-YOLO11: A Maturity Detection Model
for Multi-Variety Tomato,” Agronomy, vol. 14, no. 11,
p. 2644, Nov. 2024, doi: 10.3390/agronomy14112644.
Xu, H. Zhao, O. M. Lawal, X. Lu, R. Ren, and S. Zhang,
“An Automatic Jujube Fruit Detection and Ripeness
Inspection Method in the Natural Environment,”
Agronomy, vol. 13, no. 2, p. 451, Feb. 2023, doi:
10.3390/agronomy13020451.
Zhang, S. Ye, S. Zhao, W. Wang, and C. Xie, “Pear Object
Detection in Complex sOrchard Environment Based on
Improved YOLO11,” Symmetry, vol. 17, no. 2, p. 255,
Feb. 2025, doi: 10.3390/sym17020255.
Detection of Pomelo in Overlapping Conditions Using Drones
31
