
Witness Byzantine Fault Tolerance with Signature Tree and
Proof-of-Navigation for Wide Area Visual Navigation
Nasim Paykari
1 a
, Taylor Clark
2
, Ademi Zain
1
, Damian Lyons
1 b
and Mohamed Rahouti
2 c
1
Computer and Information Science Department, Fordham University, Bronx, NY 10458, U.S.A.
2
Computer and Information Science Department, Fordham University, New York, NY 10023, U.S.A.
Keywords:
Blockchain, Byzantine Fault Tolerance, Multi-Signature, Merkle Tree, Wide Area Visual Navigation,
Cooperative Robotics.
Abstract:
This paper presents Witness Byzantine Fault Tolerance (WBFT), a novel consensus protocol designed for Wide
Area Visual Navigation (WAVN) systems, where cooperative robots share visual imagery in GPS-denied en-
vironments and reach agreement on navigation data via blockchain. WBFT addresses the limitations of tradi-
tional Byzantine Fault Tolerance (BFT) methods, particularly the high communication overhead of protocols
like PBFT, by introducing a lightweight, secure, and signature-based consensus mechanism optimized for
resource-constrained robotic networks. The protocol integrates a Proof-of-Stake-based leader election system,
named Proof-of-Navigation (PoN), with a signature aggregation approach using Ed25519 cryptography and
a Merkle tree structure, reducing verification complexity to O(logt) and achieving consensus with only O(n)
message complexity. WBFT tolerates up to f ≤ ⌊(n − 1)/3⌋ Byzantine faults and demonstrates superior re-
silience, scalability, and communication efficiency compared to existing BFT variants. Experimental results
validate WBFT’s performance across multiple metrics and network sizes, confirming its suitability for high-
frequency, decentralized robotic coordination.
1 INTRODUCTION
Wide Area Visual Navigation (WAVN) enables a
group of robots to collaboratively navigate by shar-
ing visual imagery, assisting a robot in locating a des-
ignated home through a sequence of common land-
marks (Lyons and Rahouti, 2023). WAVN integrates
a blockchain where robots earn tokens for sharing im-
agery among other activities, and the robot with the
most tokens wins the right to generate the next block
(Paykari et al., 2024). However, faulty or malicious
robots can disrupt consensus, risking the integrity of
the blockchain and navigation process. In contrast,
traditional consensus protocols like Practical Byzan-
tine Fault Tolerance (PBFT) suffer from high message
complexity and limited trust in an open network, im-
practical for open or resource-constrained networks
(Castro et al., 1999).
To address this, we introduce the Witness Byzan-
tine Fault Tolerance (WBFT) protocol, a consensus
a
https://orcid.org/0009-0005-6793-7417
b
https://orcid.org/0000-0003-1460-9741
c
https://orcid.org/0000-0001-9701-5505
mechanism tailored to combine with the main con-
sensus of WAVN’s Blockchain. The WBFT protocol
is designed to meet the needs of the WAVN system,
where robots must reach consensus on navigation data
while tolerating Byzantine faults. The protocol lever-
ages a selected leader through the PoN phase and
threshold signatures to optimize performance. WBFT
leverages a multi-signatures with aggregation to min-
imize communication overhead, achieving consen-
sus in two rounds (propose and witness/committed)
with O(n) message complexity and tolerating up to
( f ≤ ⌊(n−1)/3⌋) Byzantine faults. Unlike traditional
PBFT (Castro et al., 1999), WBFT uses a predefined
leader and aggregated signatures to reduce network
traffic, making it suitable for resource-constrained
robots.
The WBFT Byzantine fault tolerance method in-
tegrates a digital signature-based strategy to achieve
consensus in a distributed network, improving the tra-
ditional voting mechanisms. In each consensus round,
the designated leader, determined by a precomputed
schedule in the Robostake component (Paykari et al.,
2024), broadcasts a message to all nodes in the net-
work. This message is accompanied by the leader’s
Paykari, N., Clark, T., Zain, A., Lyons, D. and Rahouti, M.
Witness Byzantine Fault Tolerance with Signature Tree and Proof-of-Navigation for Wide Area Visual Navigation.
DOI: 10.5220/0013961300003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 633-644
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
633

digital signature, which allows each node to inde-
pendently verify both the message’s validity and the
leader’s identity using a predefined cryptographic
scheme.
Upon receiving the message, a node validates the
leader’s signature and the message content. If valid,
the node appends its own digital signature to the mes-
sage, acting as a witness to both the message’s cor-
rectness and the leader’s signature. This doubly-
signed message is then rebroadcast to the network.
Upon receiving a message with two signatures, sub-
sequent nodes verify both signatures. If the signatures
are valid, the node replaces the second signature with
its own and rebroadcasts the message. This process
creates a chain of signature updates, where each node
contributes to the message’s validation.
To ensure scalability and efficiency, nodes orga-
nize signatures into a Merkle tree structure, with in-
dividual signatures forming the leaves. As signa-
tures accumulate, the Merkle tree is updated, allow-
ing nodes to track the number of valid signatures ef-
ficiently. Once the number of signatures surpasses a
predefined threshold, the message is considered com-
mitted and eligible for inclusion in the blockchain.
The committed message and its Merkle tree are then
broadcast to the network for final inclusion in the
blockchain.
This method leverages the Robostake component
to precompute the leader for each block, ensuring de-
terministic leader selection and reducing the risk of
leader-based attacks. The approach mitigates various
Byzantine faults, including malicious leader behavior,
by replacing voting with a signature-based validation
and propagation mechanism. It enhances resilience
against other attack vectors, such as Sybil attacks and
message tampering.
The key contributions of this paper are summa-
rized as follows.
• Propose WBFT, a novel consensus protocol
tailored for WAVN in GPS-denied, resource-
constrained robotic environments.
• Introduce a Proof-of-Navigation (PoN) mecha-
nism, a PoS-inspired leader selection algorithm
based on robots’ navigation reliability and envi-
ronmental adaptability, ensuring transparent and
tamper-proof leader election.
• Leverage a Merkle tree–based multi-signature ag-
gregation method that reduces verification com-
plexity from O(n) to O(logt), enabling efficient
consensus validation among robotic agents.
• Achieve consensus in only two rounds (pro-
pose and witness) with O(n) message complex-
ity, significantly reducing communication over-
head compared to classical PBFT and its variants.
• Demonstrate that WBFT tolerates up to f ≤ ⌊(n −
1)/3⌋ Byzantine nodes and ensures correctness
and liveness in adversarial network settings.
• Provide comprehensive experimental benchmarks
comparing WBFT to BLS, aggregate, and thresh-
old signature schemes, and evaluate scalability
across varying network sizes.
• Validate WBFT’s suitability for high-frequency,
decentralized robotic coordination tasks in visual
navigation, particularly under bandwidth and re-
source constraints.
The rest of this paper is structured as follows. Sec-
tion 2 provides background on the WAVN system,
blockchain integration, and the hybrid PoS–BFT con-
sensus mechanism. Section 3 reviews relevant work
in Byzantine fault tolerance and consensus protocols.
Section 4 details the design of the WBFT protocol,
including its cryptographic components and signature
aggregation scheme. Section 5 presents experimental
results evaluating performance and scalability. Sec-
tion 6 discusses key insights and limitations, and Sec-
tion 7 concludes the paper with directions for future
work.
2 BACKGROUND AND SYSTEM
CONTEXT
To better understand the design rationale behind the
proposed protocol, this section presents the key com-
ponents and operational context of the WAVN sys-
tem. It outlines the role of collaborative visual local-
ization, blockchain-based incentives, and the hybrid
consensus mechanism that combines PoS leader se-
lection with Byzantine fault tolerance. These founda-
tional concepts establish the system requirements and
assumptions guiding our methodological design.
2.1 Wide Area Visual Navigation
(WAVN)
In WAVN, a group of robots collaborates to guide
a robot in a dynamic and GPS-denied environment
to a designated location using shared visual imagery.
Each robot captures and shares images of its sur-
roundings. Any robot in the team that needs to navi-
gate to a location, identified by a goal image, out of its
immediate field of view, leverages the imagery from
the team to find a sequence of landmarks seen in com-
mon between team members that can be followed to
the target location.
TISAS 2025 - Special Session on Trustworthy and Intelligent Smart Agriculture Systems: AI, Blockchain, and IoT Convergence
634

2.2 Blockchain
Robots generate transactions that include imagery of
the main robot and common landmarks between it and
another robot. In the next level, robots compete to
generate the next block, which leads to the reward of
a constant amount of tokens. The system incentivizes
participation through a blockchain where:
• Robots earn tokens for activities such as contribut-
ing valid imagery and common landmarks, partic-
ipating in the network, or generating a block.
• A competition process, as described in (Paykari
et al., 2025a), determines the next block generator
based on token accumulation.
• The blockchain records imagery and common
landmarks contributions, ensuring transparency,
immutability, and accessibility.
• In case of navigation needs, a robot uses the ledger
and retrieves transactions to generate a sequence
of common landmarks from the current position
to the home (Paykari et al., 2025b).
2.3 Hybrid Consensus
Whether silent (failing to respond) or Byzantine
(sending malicious data), Faulty robots can disrupt
navigation or manipulate records. Consensus ad-
dresses this by securing the blockchain, ensuring only
valid imagery contributions are recorded.
2.3.1 PoS Based Consensus
The PoN system, as outlined in (Paykari et al., 2024;
Paykari et al., 2025a), employs a blockchain-based
Proof-of-Stake (PoS) mechanism to select a leader for
cooperative navigation among robotic teams. Each
robot is assigned a stake through a stake weight func-
tion, which evaluates its navigation reliability based
on factors like historical performance. A PoS con-
sensus score is then calculated, reflecting each robot’s
influence, with higher scores indicating greater trust-
worthiness. The robot with the highest consensus
score is dynamically chosen as the leader for a given
block, coordinating tasks like path planning using
verified data stored on the blockchain. This en-
sures transparent, tamper-proof selection. A navi-
gability function further tailors the stake to the spe-
cific environment, providing the leader is best suited
for tasks like navigating agricultural fields or dense
forestry. The system adapts dynamically, reassigning
leadership as conditions or robot performance change,
though challenges like faulty leaders or Byzantine be-
havior remain unsolved.
The leader selection process for the robotic team
is managed through the PoS-based PoN mechanism,
which is tailored for cooperative navigation Alg. 1. It
works in this way:
1. Stake Weight Function:
• Each robot in the team is assigned a stake
based on its navigation reliability and activi-
ties. This reliability is determined by factors
such as historical performance or contribution
to the team’s navigation goals.
• The stake weight function quantifies the por-
tion of the stake by the robot compared to the
whole stake, giving a higher chance to robots
with more reliable navigational sharing to be
selected as the next leader.
2. PoS Consensus Score:
• The PoN system calculates a consensus score
for each robot based on its stake. This score
reflects the robot’s influence in the decision-
making process.
• Robots with higher consensus scores (i.e., those
with higher stakes due to reliable navigation
data) are prioritized for leadership roles.
3. Leader Selection:
• The robot with the highest consensus score at
a given time is selected as the leader for the
next block generation. The leader is responsi-
ble for collecting transactions and broadcasting
them as a new block that, along with the collec-
tive data verified through the blockchain, will
be used for path planning.
• The blockchain ensures that the selection pro-
cess is transparent and tamper-proof, as all
robots validate the leader’s score using the de-
centralized ledger and the last block.
4. Dynamic Updates:
• The leader role is not fixed; it can change dy-
namically as the robots’ stakes and consensus
scores are updated based on real-time perfor-
mance and environmental conditions.
• For example, if a robot’s sensors degrade or its
navigation data becomes less reliable, its stake
and consensus score decrease, reducing its like-
lihood of being selected as the leader. Even if
a robot becomes isolated from others, it has no
chance of becoming the next leader.
2.3.2 Byzantine Fault Tolerance
To ensure the integrity and reliability of the WAVN
blockchain in the presence of faulty or malicious
Witness Byzantine Fault Tolerance with Signature Tree and Proof-of-Navigation for Wide Area Visual Navigation
635

robots, the WBFT protocol is integrated with the
PoN’s Proof-of-Stake (PoS) mechanism to achieve ro-
bust consensus. WBFT addresses Byzantine faults,
such as robots sending malicious imagery or manip-
ulating navigation data, by leveraging a signature-
based consensus mechanism that eliminates the high
message complexity of traditional PBFT. Unlike
PBFT’s, WBFT achieves agreement through a two-
phase process (propose and witness) using aggregated
Ed25519 signatures and a Merkle tree structure. In
the propose phase, the leader, selected via the PoN
process based on its consensus score, broadcasts a
block containing imagery transactions with its digi-
tal signature. Nodes validate this signature and con-
tribute their own signatures to a Merkle tree, where
each signature is hashed with the node’s identifier
to form a leaf, enabling efficient verification with
O(logt) complexity for a threshold t = ⌊2n/3⌋ + 1.
This approach tolerates up to f ≤ ⌊(n − 1)/3⌋ Byzan-
tine faults.
In the witness phase, once the threshold number of
valid signatures is collected, the Merkle tree’s root is
broadcast, allowing all nodes to verify the block’s au-
thenticity and the threshold condition independently.
The use of Ed25519 signatures ensures fast signing
and verification, with compact 32-byte public keys
and 64-byte signatures, minimizing network over-
head, critical for robots sharing high-frequency vi-
sual imagery. The protocol’s integration with PoN
ensures that only reliable robots with high consensus
scores lead the consensus, reducing the risk of mali-
cious leader behavior.
3 STATE-OF-THE-ART
Blockchain technology has emerged as a powerful
tool for enabling decentralized trust in robotics and
navigation systems (Aditya et al., 2021), particularly
in applications like WAVN (Paykari et al., 2024). The
PBFT protocol, a cornerstone of BFT, achieves con-
sensus in partially synchronous networks but incurs
high communication overhead with O(n
2
) messages
due to its all-to-all communication in the prepare and
commit phases (Castro et al., 1999). Recent BFT vari-
ants, such as HotStuff and Tendermint, improve scal-
ability by reducing message complexity and optimiz-
ing leader rotation. Yet, they still struggle in resource-
constrained environments due to computational de-
mands (Yang and Bajwa, 2019). Threshold signa-
ture schemes, like BLS, provide compact signatures
but require complex setup phases, which can be im-
practical for dynamic robotic networks (Boneh et al.,
2018). In contrast, our WBFT protocol leverages
a lightweight, signature-based consensus mechanism
with aggregated Ed25519 signatures and a Merkle
tree structure, achieving O(n) message complexity
and eliminating the need for complex setup, making
it ideal for bandwidth-constrained robotic systems.
BFT remains critical for ensuring reliable consen-
sus in distributed systems despite malicious or faulty
nodes, with recent advancements enhancing scala-
bility and adaptability for modern applications like
blockchain and cyber-physical systems (CPS). Liu
and Junwu (Liu and Zhu, 2024) propose AP-PBFT.
This enhanced PBFT framework incorporates a Ver-
ifiable Random Function (VRF) to select consensus
and primary nodes, ensuring fair proposal aggrega-
tion for multi-value consensus in decentralized au-
tonomous organizations (DAOs). An incentive mech-
anism promotes honest participation, reducing col-
lusion risks and improving efficiency in complex
decision-making scenarios. Unlike AP-PBFT’s focus
on multi-value consensus and incentive-driven partic-
ipation, WBFT prioritizes a streamlined, signature-
based approach using a Merkle tree to achieve effi-
cient verification with O(logt) complexity, tailored
for resource-constrained robotic networks in WAVN.
Wang et al. (Huang et al., 2022) introduce
WRBFT, a PBFT variant that uses workload-based
node selection and VRF for dynamic primary node as-
signment, addressing fixed node roles and high com-
munication overhead. By enabling flexible node entry
and exit, WRBFT enhances scalability and resilience,
making it suitable for large-scale blockchain net-
works. WBFT diverges by integrating a precomputed
leader schedule via the PoS-inspired PoN mechanism
and employing aggregated Ed25519 signatures, re-
ducing communication overhead and optimizing per-
formance for robotic systems with limited bandwidth.
Wu et al. (Wu et al., 2023) develop RPBFT, tai-
lored for CPS, with improved master node election,
robust malicious node detection, and optimized view
changes to reduce communication delays and increase
throughput. This method ensures reliable consensus
in resource-constrained IoT-enabled blockchain sys-
tems while maintaining security against Byzantine
faults. In contrast, WBFT uses a Merkle tree-based
signature aggregation to achieve efficient verification
and incorporates a leader rotation mechanism, mak-
ing it more suitable for high-frequency, bandwidth-
constrained robotic navigation tasks in WAVN.
Byzantine-resilient Distributed Coordinate De-
scent (ByRDiE) (Yang and Bajwa, 2019) tack-
les Byzantine faults in high-dimensional distributed
learning, enabling robust optimization in decentral-
ized machine learning tasks across convex and non-
convex settings. Its focus on data-driven applica-
TISAS 2025 - Special Session on Trustworthy and Intelligent Smart Agriculture Systems: AI, Blockchain, and IoT Convergence
636

tions expands BFT’s scope beyond blockchain, of-
fering resilience in adversarial environments. WBFT,
however, is explicitly designed for blockchain-based
robotic navigation, using a signature tree method to
ensure efficient consensus with O(logt) verification
complexity, distinct from ByRDiE’s optimization-
centric approach.
Asynchronous Algorand (Abraham et al., 2025)
advances BFT for blockchain systems by achieving
near-linear communication complexity and constant
expected time, even in dynamic networks with un-
known participation. Its asynchronous design over-
comes limitations of synchronous BFT protocols in
handling network delays and partitions, enhancing
scalability. Unlike Asynchronous Algorand’s fo-
cus on asynchronous consensus, WBFT employs a
synchronous, signature-based mechanism optimized
for deterministic leader selection and compact signa-
ture aggregation, prioritizing efficiency in resource-
constrained robotic environments.
The reviewed methods, AP-PBFT, WRBFT,
RPBFT, ByRDiE, and Asynchronous Algorand,
demonstrate significant strides in addressing scala-
bility, efficiency, and adaptability in BFT protocols
across diverse applications. WBFT distinguishes it-
self by combining a signature-based consensus with
a Merkle tree structure and PoS-based PoN leader se-
lection, achieving low communication overhead, tai-
lored for WAVN’s robotic blockchain system.
Algorithm 1: PoN leader selection.
Data: Set of robots R = {r
1
,r
2
,...,r
n
} with
navigation histories and performance
metrics
Result: Selected leader r
∗
for the next block
generation
foreach r
i
∈ R do
Retrieve navigation reliability score s
i
based on last committed block (B
n−1
);
Compute stake weight w
i
=
s
i
∑
n
j=1
s
j
;
Compute PoS consensus score
c
i
= f (w
i
,navigability context);
Select robot r
∗
with the highest consensus
score c
i
;
if multiple robots share max c
i
then
Break tie using secondary metrics (e.g.,
recency of successful navigation or
token age);
return r
∗
as the PoN leader for the current
round;
4 METHODOLOGY
This section details the methodology and structure of
the WBFT protocol, providing a comprehensive ex-
planation of its components and their roles in achiev-
ing consensus in a distributed system. Each compo-
nent of WBFT is justified with respect to its contri-
bution to fault tolerance, security, and efficiency. Ad-
ditionally, we highlight that multiple solutions exist
for each component of the protocol, and by substitut-
ing or refining these modular elements, the method’s
performance, scalability, or resilience may be further
improved.
4.1 Signatures and Verifications
To ensure secure and efficient message valida-
tion in the WBFT protocol, we evaluate three
cryptographic methods, including ECDSA-secp256r1
(Kramer et al., 2018), Ed25519 (Bisheh-Niasar et al.,
2021), and RSA-2048-bit (Sadikin and Wardhani,
2016) for generating public/private key pairs, creat-
ing digital signatures, and verifying them across a
distributed network. These methods are compared
based on signing time, verification time, and the sizes
of public keys, private keys, and signatures, as these
metrics directly impact the protocol’s performance
and network overhead. Keys and signatures are seri-
alized using the DER format for ECDSA and RSA,
and raw encoding for Ed25519, ensuring compati-
bility with network transmission requirements. The
evaluation reveals Ed25519 offers the fastest sign-
ing and verification with compact key and signa-
ture sizes, ideal for bandwidth-constrained networks;
ECDSA provides a balanced approach with moderate
sizes and performance; and RSA, while secure, incurs
higher computational and size overheads. By analyz-
ing these metrics, we identify Ed25519 as a promising
candidate for WBFT, with the flexibility to adopt al-
ternative methods based on specific security or perfor-
mance needs. The results are visualized in Figure 1,
highlighting the suitability of each technique for scal-
able Byzantine fault tolerance.
The WBFT protocol employs the DER format for
serializing and deserializing public and private keys
for ECDSA and RSA and raw encoding for Ed25519
due to their compact binary representations. For in-
stance, Ed25519 public keys are 32 bytes, ECDSA
public keys are approximately 70 bytes in DER for-
mat, and signatures are 64 bytes and approximately
70 bytes, respectively. These compact sizes mini-
mize network overhead, ensuring efficient transmis-
sion and processing in WBFT’s broadcast-heavy con-
sensus mechanism.
Witness Byzantine Fault Tolerance with Signature Tree and Proof-of-Navigation for Wide Area Visual Navigation
637

ECDSA (secp256r1) Ed25519 RSA (2048-bit)
0
0.5
1
1.5
0.14
5 · 10
−2
1.54
0.12
0.21
9 · 10
−2
Time (ms)
Signing and Verification Times
Sign Time (ms)
Verify Time (ms)
ECDSA (secp256r1) Ed25519 RSA (2048-bit)
0
500
1,000
91
32
294
138
32
1,216
Size (bytes)
Key Sizes
Public Key Size
Private Key Size
ECDSA (secp256r1) Ed25519 RSA (2048-bit)
0
100
200
70
64
256
Cryptographic Method
Size (bytes)
Signature Size
Signature Size
Figure 1: Comparison of ECDSA (secp256r1), Ed25519,
and RSA (2048-bit) in terms of signing/verification times
and key/signature sizes, demonstrating Ed25519’s effi-
ciency.
The Ed25519 signature scheme operates over the
Edwards curve defined by x
2
+ y
2
= 1 + dx
2
y
2
over a
finite field F
p
, where p = 2
255
− 19 and d is a curve-
specific constant. For a private key k ∈ Z, the public
key is computed as A = [k]B, where B is the curve’s
base point. To sign a message M, the signer computes
a scalar r = H(k, M) (where H is a cryptographic
hash function, typically SHA-512), a point R = [r]B,
and a scalar s = r + H(R,A,M) · k mod ℓ, where ℓ
is the order of the curve’s base point. The signa-
ture is the pair (R,s). Verification involves checking
if [s]B = R + [H(R,A, M)]A, ensuring the signature’s
validity without revealing k. This scheme’s compact
32-byte keys and 64-byte signatures, combined with
its fast scalar multiplication, make it a good candidate
for WBFT’s high-frequency signature broadcasts.
4.2 Signature Tree
A digital signature authenticates the origin and in-
tegrity of a message, while a multisignature scheme
enables multiple parties to collaboratively sign a
message, enhancing security in distributed systems
like WBFT. Several multisignature approaches exist,
each with unique trade-offs. The BLS (Boneh-Lynn-
Shacham) scheme, leveraging bilinear pairings on the
BLS12-381 curve, aggregates individual signatures
into a compact 48-byte signature, verified via a single
pairing operation, though verification time scales with
the number of signers (Bacho and Loss, 2022). Ag-
gregate signatures concatenate individual signatures
into a single byte string, simplifying verification but
resulting in a signature size that grows linearly with
the number of signers, making it less efficient for
large groups (Bellare and Neven, 2006). Threshold
signature schemes require a minimum number of sig-
natures (t-of-n) to validate a message, offering flexi-
bility in signer participation but necessitating individ-
ual verification for each signature, which can be com-
putationally intensive (Chu et al., 2023). To address
these limitations, we propose a signature tree method
that integrates threshold signatures with a Merkle tree
structure, enabling efficient verification of multiple
signatures in WBFT.
Our signature tree method enhances threshold sig-
natures for the WBFT protocol by integrating them
with a Merkle tree structure, offering efficient verifi-
cation of multiple signatures in distributed systems.
In this approach, a leader node broadcasts a mes-
sage signed by participating nodes to produce individ-
ual signatures. Each signature, concatenated with the
node’s unique identifier, is hashed to form a leaf in the
Merkle tree. The tree is constructed by pairwise hash-
ing leaves up to a single root, representing the collec-
tive signatures. To validate the message, a node ver-
ifies that the Merkle root corresponds to a threshold
number of valid signatures, using the associated pub-
lic keys and Merkle paths. This method reduces ver-
ification complexity from O(n) to O(log n) for n sig-
natures, as only the root and relevant paths need veri-
fication, making it highly scalable for large networks.
However, constructing the tree introduces computa-
tional overhead, particularly for dynamic node sets,
which must be balanced against the efficiency gains
in verification.
The method leverages the cryptographic proper-
ties of Merkle trees to ensure integrity and authen-
ticity in WBFT’s consensus mechanism. Requir-
ing a designated leader’s signature in the tree en-
sures a consistent message origin, while witness sig-
natures provide fault-tolerant agreement. The use of a
threshold ensures robustness and efficiency, as each
robot that meets the threshold faster has the proof
for committing and adding the block to the chain.
The compact Merkle root, typically 32 bytes (us-
ing SHA-256), minimizes network overhead during
broadcast, making this approach ideal for WBFT’s
high-frequency, bandwidth-constrained environment.
Compared to BLS and aggregate signatures, the sig-
nature tree method offers a balance of scalability and
flexibility, particularly suited for scenarios where par-
tial verification of large signer sets is critical. It also
TISAS 2025 - Special Session on Trustworthy and Intelligent Smart Agriculture Systems: AI, Blockchain, and IoT Convergence
638

eliminates needing a trusted channel or third party to
communicate required keys.
Our multi-signature method is chosen for its com-
patibility with Ed25519, which offers fast signing and
verification, ideal for resource-constrained robots.
Unlike BLS signatures, which require a complex
setup phase, our method is straightforward, concate-
nating individual signatures while maintaining veri-
fiability. Compared to ring signatures, it provides
stronger accountability, as each signer’s contribution
is explicit. The method aligns with WBFT’s fast path,
reducing bandwidth usage in WAVN’s visual data ex-
changes.
4.3 WBFT Protocol
The WBFT protocol is a consensus mechanism tai-
lored for PoN blockchain systems, enabling a group
of n nodes to agree on a shared block of blockchain
ledger despite the presence of up to f ≤ ⌊(n −
1)/3⌋ faulty nodes, ensuring resilience in dynamic,
resource-constrained environments. WBFT achieves
consensus through three main phases: propose, wit-
ness, and commit, requiring a threshold of t =
⌊2n/3⌋ + 1 valid signatures to validate an entry, bal-
ancing security, scalability, and efficiency. In the
propose phase, a designated leader node, selected by
the PoN process (see Algorithm 1), initiates consen-
sus by broadcasting a new entry (block) accompanied
by the Ed25519 cryptographic signature. This sig-
nature ensures the entry’s authenticity and integrity,
allowing nodes to verify the leader’s identity. Dur-
ing the witness phase, participating nodes validate the
leader’s signature against the leader’s public key and,
if valid, contribute their own signatures to a Merkle
tree, where each signature is hashed to form a leaf.
The Merkle tree structure organizes these signatures
hierarchically, pairwise hashing leaves to compute
parent nodes until a single root is derived, enabling
efficient verification with O(logt) complexity com-
pared to O(n) for traditional threshold schemes.
Once the threshold number of signatures is col-
lected in the commit phase, the fastest reached broad-
casts the Merkle tree, allowing independent verifi-
cation of the threshold condition for others. Each
node recomputes the Merkle root using the provided
tree and signatures, ensuring the leader’s signature
is included and the threshold is met, before append-
ing the entry to the blockchain. This will eliminate
the need for communication overhead in the commit
phase compared to PBFT. A secure key exchange en-
sures that all nodes share public keys before consen-
sus begins, maintaining network reliability.
Consider a set of n nodes in the WBFT proto-
col, with a designated leader node and a threshold
t ≤ n required for block validation. Let B
m
be the
Block to be signed, and each node i (for i = 1,.. ., n)
has a private key sk
i
∈ Z and corresponding public
key pk
i
= [sk
i
]G, where G is a generator of an ellip-
tic curve group. The leader node signs B
m
to pro-
duce a signature σ
L
= Sign(sk
L
,B
m
), where Sign is
the signing function. Each witness node i (for i ̸= L)
signs (B
m
,σ
L
) to produce σ
i
= Sign(sk
i
,(B
m
,σ
L
)).
These signatures will create leaves l
i
= H(ID||σ
j
),
and the leader’s leave also includes the block l
i
=
H(ID||B||σ
j
).
Algorithm 2: Witness Byzantine Fault Tolerance
(WBFT).
Data: Set N = {r
1
,...,r
n
} with PKs
{pk
1
,..., pk
n
}, leader r
L
Result: Committed block B
m
Propose:
r
L
creates B
m
, σ
L
← Sign(sk
L
,B
m
)
Broadcast (B
m
,σ
L
)
Witness:
foreach r
i
∈ N \ {r
L
} do
Construct Merkle tree T
Let Σ ← {σ
L
} ∪ {σ
j
} (received
signatures)
if ∀σ ∈ Σ, Verify(pk
σ
,B
m
,σ) then
l
σ
← H(ID
σ
∥ σ) for each σ ∈ Σ
l
i
← H(ID
i
∥ σ
i
)
Broadcast (σ
i
← Sign(sk
i
,(B
m
,σ
L
)))
Commit:
if |L| ≥ ⌊2n/3⌋ + 1 then
R ← Root(T )
Broadcast (R,T )
foreach r
j
∈ N do
if VerifyMerklePath(R, l
σ
L
,T ) then
Append B
m
to chain
return B
m
For pair signatures σ
i
,σ
j
, then p
i
= H(σ
i
||σ
j
) is
computed, where H is a cryptographic hash func-
tion and || denotes concatenation. The Merkle tree is
constructed by organizing the t leaves {l
1
,. .. ,l
t
} (in-
cluding the leader’s leaf l
L
) into a binary tree. For
a level with leaves l
i
,l
i+1
, as mentioned the parent
node is p
i,i+1
= H(l
i
||l
i+1
). This process continues,
hashing pairs of nodes until the root R = H(p
k
||p
m
)
is computed, where p
k
, p
m
are the final nodes at the
top level. Verification involves checking that t signa-
tures, including σ
L
, are valid using their public keys
(i.e., Verify(pk
i
,B
m
,σ
i
) = True) and reconstructing
the Merkle root R
′
from the provided signatures and
Witness Byzantine Fault Tolerance with Signature Tree and Proof-of-Navigation for Wide Area Visual Navigation
639
their Merkle paths, as expressed in Algorithm 2. The
message is valid if R
′
= R and the leader’s signature is
included, ensuring authenticity and threshold compli-
ance with O(logt) complexity for path verification.
5 EVALUATION
In this section, we evaluate the performance and scal-
ability of the WBFT protocol’s signature tree method.
We conducted two experiments benchmarking its ef-
ficiency against other multisignature schemes and as-
sessing its scalability across varying network sizes.
These experiments focus on key metrics such as sign-
ing time, verification time, and signature size, which
are critical for resource-constrained robotic networks
in the WAVN system.
5.1 Experimental Setup
All benchmarks in Sections 5.1–5.3 were con-
ducted in a controlled simulation environment. The
WBFT and PBFT protocols were implemented
in Python 3.11 using the TCP sockets for reli-
able message passing and threading for concur-
rent message handling. Cryptographic operations
(Ed25519 signing/verification) were performed using
the cryptography library. Experiments were exe-
cuted on a workstation equipped with an Intel Core
i7-1260P (2.50 GHz), 16 GB RAM, running Win-
dows. To emulate network latency and packet loss, we
used the Linux tc/netem utility, introducing random-
ized delays in the range specified for each experiment
(e.g., 0–1 s in Sec. 5.3). Each data point reflects the
average over 20 independent runs. This setup allowed
us to capture both protocol-level message complex-
ity and cryptographic verification overhead in con-
ditions approximating bandwidth-constrained robotic
networks.
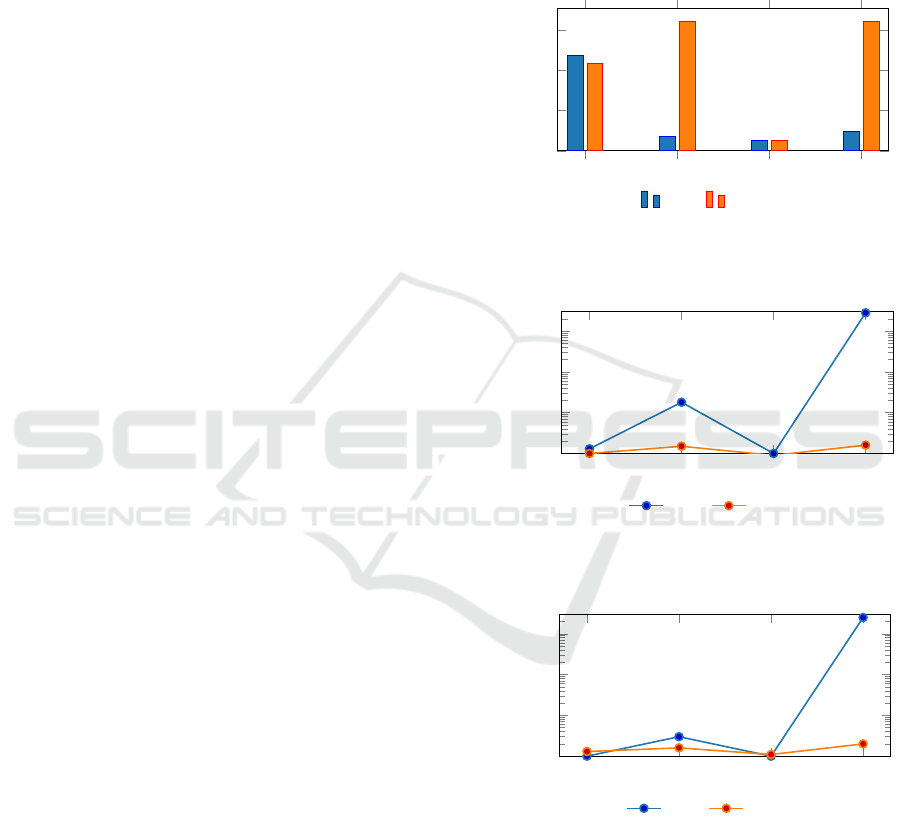
5.2 Multisignature Scheme
Benchmarking
In the first experiment, we benchmarked four mul-
tisignature schemes: BLS, aggregate, threshold, and
our novel signature tree method, using a network of
10 nodes with a threshold of 6 signatures, over 20
runs. The experiment measured average signing time,
verification time, and signature size for each scheme,
implemented with elliptic curve cryptography. The
signature tree method organizes threshold signatures
into a Merkle tree, enabling efficient verification with
O(logt) complexity. Results, visualized in Figure 2,
demonstrate that the signature tree method achieves
a balance of fast verification and moderate signa-
ture size, outperforming BLS in verification speed
and aggregate signatures in size efficiency, making it
well-suited for WBFT’s high-frequency consensus in
robotic networks.
Threshold
Aggregate
Merkle BLS
0
200
400
600
Method
Signature Size (bytes)
Avg Signature Size (10 Robots, Thr=6)
ECC Ed25519
(a) Signature size
Threshold
Aggregate
Merkle BLS
10
−3
10
−2
10
−1
10
0
Method
Time (s)
Avg Signing Time (10 Robots, Thr=6)
ECC Ed25519
(b) Signing time
Threshold
Aggregate
Merkle BLS
10
−3
10
−2
10
−1
10
0
Method
Time (s)
Avg Verification Time (10 Robots, Thr=6)
ECC Ed25519
(c) Verification time
Figure 2: Performance comparison of BLS, aggregate,
threshold, and signature tree methods in terms of average
signature size, signing time, and verification time for 10
nodes with a threshold of 6, over 20 runs, highlighting the
signature tree method’s efficiency for WBFT.
TISAS 2025 - Special Session on Trustworthy and Intelligent Smart Agriculture Systems: AI, Blockchain, and IoT Convergence
640

5.3 Scalability Analysis
In the second experiment, we assessed the scalability
of the same four multisignature schemes by varying
the number of nodes from 5 to 20, with a threshold of
⌊n/2⌋ + 1, over 20 runs. This experiment measured
average signing time, verification time, and signa-
ture size for ECC and Ed25519 implementations. Re-
sults in Figure 3 visualize the signature tree method’s
superior verification efficiency and moderate signa-
ture size across increasing node counts, confirming its
suitability for WBFT’s distributed consensus in large-
scale, fault-tolerant robotic systems.
The comparative analysis of WBFT and PBFT
based on logs from a four-node system (robot 0 as
leader, robot 1, robot 2, robot 3 as followers) re-
veals distinct performance and resilience characteris-
tics. PBFT demonstrates superior efficiency, achiev-
ing an average commit time of approximately 0.0067
seconds (ranging from 0.00277 to 0.01155 seconds
across robot 2 and robot 3) compared to WBFT’s
0.027 seconds (ranging from 0.01477 to 0.05403 sec-
onds). This performance edge in PBFT stems from its
streamlined vote-based mechanism, which minimizes
message exchanges by enabling parallel vote pro-
cessing, unlike WBFT’s sequential propose-confirm-
commit phases. PBFT’s ability to commit 14 en-
tries (0–13) versus WBFT’s 12 (0–11) further under-
scores its robustness, particularly in handling Byzan-
tine faults, such as those injected by the leader and
robot 1. However, WBFT’s structured approach offers
unique strengths, particularly in environments priori-
tizing deliberate consensus validation.
5.4 WBFT
An experiment comparing PBFT and WBFT high-
lights distinct differences in their performance un-
der identical conditions, focusing on commit times,
communication efficiency, and fault-handling mecha-
nisms. Both systems were tested with 7 robots with
random delay between 0 and 1, using a threshold of 5
(calculated as (⌊2n/3⌋+1), where n = 7). The WBFT
leader log shows the system successfully committing
5 entries with propose times ranging from 0.687 to
1.644 seconds (1.644 is for the Byzantine case) and
a total commit time for entry 0 at 0.63519 seconds.
Communication metrics indicate 36 proposed mes-
sages sent, 26 witnesses received, and 21 committee
messages, with only 10 rewrite attempts, demonstrat-
ing efficient recovery and consensus finalization. In
contrast, the PBFT leader log reports 6 committed en-
tries, with propose times averaging 0.683–0.686 sec-
onds and faster commit times (e.g., 0.08321 seconds
for entry 0). However, PBFT required 60 rewrite at-
tempts, suggesting higher overhead in handling mes-
sage inconsistencies, despite sending 30 propose mes-
sages, 25 votes, and 60 commit messages. While
PBFT shows slightly faster commit times in optimal
scenarios, WBFT’s lower rewrite attempts indicate
better efficiency in managing communication over-
head.
WBFT introduces several strengths over PBFT,
particularly in its use of cryptographic mechanisms
to enhance security and accountability. By employ-
ing Ed25519 signatures at each stage, WBFT ensures
that messages are tamper-proof, preventing unautho-
rized changes during transmission and thwarting at-
tacks like man-in-the-middle. Witnesses are cryp-
tographically linked to the leader’s signed proposal,
making any attempt at forgery or equivocation imme-
diately detectable. WBFT can handle network issues,
even if the leader fails after sending only one pro-
posal, without the risk of messages being altered dur-
ing the voting/witness phase. Additionally, WBFT’s
Merkle tree proof mechanism guarantees that all wit-
nesses are accurately reflected in the final commit, al-
lowing nodes to independently verify results without
relying on intermediate messages. This contrasts with
PBFT, which depends on simpler message counts and
integrity checks, lacking the robust cryptographic ver-
ification of WBFT. In scenarios where a leader might
act unreliably, WBFT’s design ensures that even in
optimistic cases, a threshold of (n/2 + 2) nodes can
prevent a malicious leader from disrupting consensus,
offering a stronger defense against such threats.
WBFT provides enhanced fault tolerance and re-
covery mechanisms compared to PBFT. Its dynamic
leader transition ensures system liveness during time-
outs, maintaining consensus even when delays or fail-
ures occur. Public key requests and proof-based com-
mits enable nodes to recover from missing or delayed
messages, improving resilience. WBFT also excels in
accountability by generating cryptographic evidence
to identify and exclude faulty nodes, mitigating risks
like forking, where a leader sends inconsistent pro-
posals to different node subsets. PBFT, while effec-
tive, is more vulnerable to such forking due to its
weaker threshold and lack of signature-based detec-
tion, leading to inefficiencies like the observed high
rewrite attempts. WBFT’s ability to produce verifi-
able evidence and maintain consensus with fewer re-
tries underscores its superiority in ensuring both secu-
rity and operational efficiency in distributed systems.
Witness Byzantine Fault Tolerance with Signature Tree and Proof-of-Navigation for Wide Area Visual Navigation
641
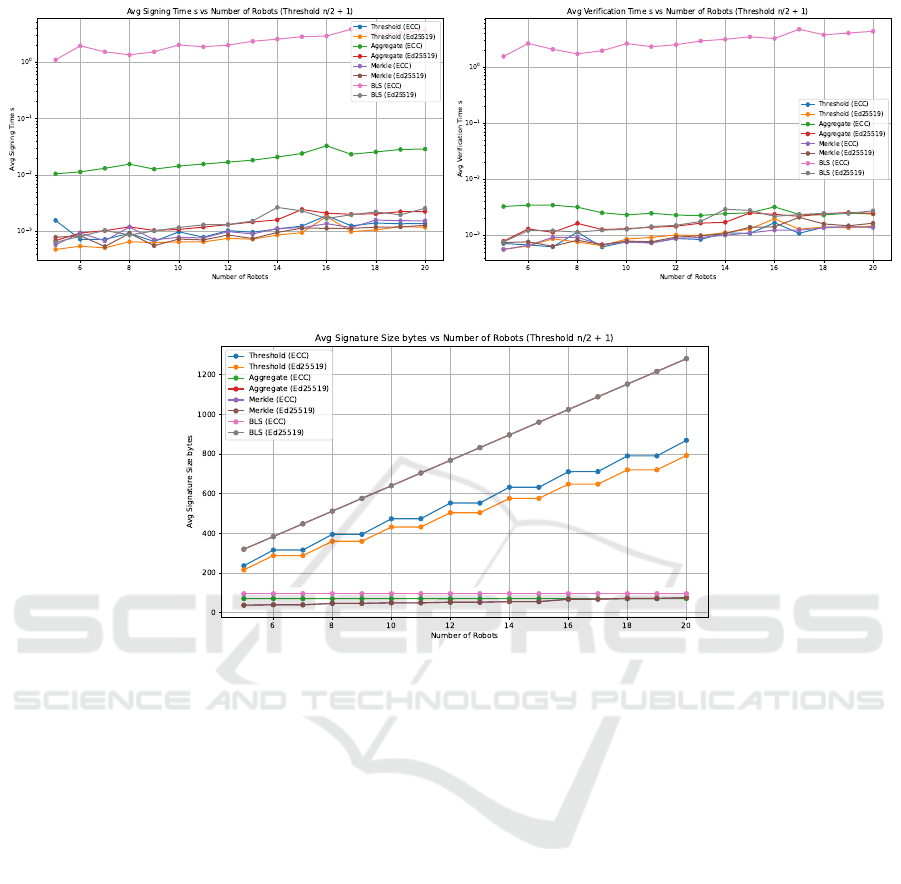
(a) Average signing time (b) Average verification time
(c) Average signature size
Figure 3: Scalability comparison of BLS, aggregate, threshold, and signature tree methods in terms of average signing time,
verification time, and signature size for 5 to 20 nodes with a threshold of ⌊n/2⌋+1, over 20 runs, demonstrating the signature
tree method’s scalability for WBFT.
6 DISCUSSION
WBFT protocol introduces a novel signature-based
consensus mechanism that significantly enhances the
trustworthiness and scalability of distributed con-
sensus in the WAVN system. Our multi-signature
method, leveraging a Merkle tree structure, reduces
verification complexity from O(n) to O(logn) for n
signatures, offering a substantial improvement over
traditional aggregate signatures, which scale linearly
with the number of signers (Bellare and Neven, 2006).
The use of Ed25519 signatures, with their compact
32-byte public keys and 64-byte signatures, ensures
fast cryptographic operations, critical for real-time
navigation tasks in resource-constrained robotic net-
works. This efficiency is particularly vital in WAVN,
where robots frequently exchange high-volume vi-
sual imagery to construct navigation paths. Addition-
ally, the integration of digital signatures with practical
Byzantine tolerance enhances security. The determin-
istic leader selection via the PoN’s PoS mechanism
further strengthens the protocol by prioritizing reli-
able nodes, ensuring transparency and tamper-proof
leadership assignment in dynamic environments like
agricultural fields or dense forestry (Paykari et al.,
2024).
Additionally, in mobile robotic settings, intermit-
tent connectivity and delays are common. WBFT’s
threshold-based design means that as long as a con-
nected component of size t = ⌊2n/3⌋ + 1 is main-
tained, consensus can still progress—albeit with
higher latency as witness signatures are collected op-
portunistically. In cases where partitions leave all
components smaller than t, WBFT preserves safety
(no conflicting commits) but temporarily halts live-
ness until connectivity resumes. The use of com-
pact Merkle proofs limits the bandwidth cost of re-
transmissions, while leader rotation provides recov-
ery during extended delays. Thus, under adverse con-
ditions WBFT is expected to degrade gracefully in la-
TISAS 2025 - Special Session on Trustworthy and Intelligent Smart Agriculture Systems: AI, Blockchain, and IoT Convergence
642
Table 1: Security comparison of WBFT and PBFT.
Dimension PBFT (Message Counting) WBFT (Cryptographic Proofs)
Commit Rule Relies on counting prepare/commit
messages; vulnerable to equivocation
Requires t = ⌊2n/3⌋ + 1 valid digital
signatures, embedded in a Merkle root
Fault Detection Limited; inconsistent views not easily
attributable
Misbehavior produces verifiable cryp-
tographic evidence (invalid or missing
signatures)
Leader Accountability Weak; malicious leaders may fork pro-
posals without proof
Strong; equivocation leaves signed evi-
dence traceable to leader
Recovery from Delays Rewrites and retries; higher communi-
cation overhead
Compact witness proofs (O(log n)) al-
low independent verification
Scalability under
Byzantine Behavior
High retries, costly in bandwidth Safety preserved with fewer retries;
evidence enables exclusion of faulty
nodes
tency while retaining safety, with future work aimed
at adaptive timeouts and opportunistic forwarding to
better match the dynamics of robotic mesh networks.
To formalize the contrast between WBFT and
PBFT, Table 1 highlights how WBFT’s signature-
based design strengthens security compared to
PBFT’s message-counting approach. Whereas PBFT
relies primarily on message tallies that can be equiv-
ocated without trace, WBFT embeds every commit in
cryptographic evidence, enabling both stronger safety
and accountability. This design reduces the risk of
forks, facilitates faster recovery, and ensures that ma-
licious behavior can be attributed and penalized.
Despite its strengths, WBFT faces several limi-
tations that warrant consideration, such as construct-
ing the Merkle tree, introducing computational over-
head, particularly in dynamic networks with frequent
node joins or exits, which may impact performance
in large-scale deployments or the behavior of the net-
work in case of a byzantine leader or a non-responsive
leader.
Future work aims to address these limitations and
further enhance WBFT’s performance and adaptabil-
ity. Developing an adaptive fault tolerance mech-
anism that dynamically adjusts the threshold based
on network conditions could improve resilience in
asynchronous settings, potentially achieving optimal
fault tolerance without sacrificing liveness. Intro-
ducing a second or third leader to the markle tree
can be another alternative. Exploring sharding tech-
niques to partition the network into smaller consen-
sus groups could reduce communication overhead
and enhance scalability, particularly for large-scale
robotic swarms. Additionally, optimizing the Merkle
tree construction process by leveraging incremental
hashing or parallel processing could mitigate com-
putational overhead in dynamic node sets. Inte-
grating lightweight cryptographic alternatives, such
as post-quantum signature schemes, could future-
proof WBFT against emerging threats while main-
taining efficiency. Finally, incorporating machine
learning-based anomaly detection to identify and
isolate Byzantine nodes in real-time could further
strengthen the protocol’s security, ensuring robust
consensus in adversarial environments. These ad-
vancements will enhance WBFT’s applicability to a
broader range of distributed robotic systems, reinforc-
ing its role as a scalable and fault-tolerant consensus
mechanism for WAVN and similar applications.
7 CONCLUSION
This paper proposed the Witness Byzantine Fault Tol-
erance (WBFT) protocol, a scalable and secure con-
sensus mechanism tailored for Wide Area Visual Nav-
igation (WAVN) in robotic systems. By combining
Ed25519 threshold signatures, a Merkle tree struc-
ture, and a novel Proof-of-Navigation (PoN) leader
selection approach, WBFT achieves efficient consen-
sus with reduced communication overhead and strong
Byzantine fault resilience. Experimental results val-
idate WBFT’s performance advantages over tradi-
tional schemes like PBFT and BLS-based multisig-
natures, particularly in verification speed, scalabil-
ity, and fault recovery. While Merkle tree construc-
tion introduces some overhead, WBFT remains well-
suited for resource-constrained, adversarial environ-
ments. Future work will optimize tree construction,
explore adaptive thresholds, and enhance resilience
using machine learning and post-quantum cryptogra-
phy, extending WBFT’s applicability to broader de-
centralized robotic networks.
Witness Byzantine Fault Tolerance with Signature Tree and Proof-of-Navigation for Wide Area Visual Navigation
643

REFERENCES
Abraham, I., Chouatt, E., Gilad, Y., Stern, G., and Yak-
oubov, S. (2025). Asynchronous algorand: Reaching
agreement with near linear communication and con-
stant expected time. In Proceedings of the ACM Sym-
posium on Principles of Distributed Computing, pages
28–38.
Aditya, U. S., Singh, R., Singh, P. K., and Kalla, A. (2021).
A survey on blockchain in robotics: Issues, opportuni-
ties, challenges and future directions. Journal of Net-
work and Computer Applications, 196:103245.
Bacho, R. and Loss, J. (2022). On the adaptive security of
the threshold bls signature scheme. In proceedings of
the 2022 ACM SIGSAC conference on computer and
communications security, pages 193–207.
Bellare, M. and Neven, G. (2006). Multi-signatures in the
plain public-key model and a general forking lemma.
In Proceedings of the 13th ACM conference on Com-
puter and communications security, pages 390–399.
Bisheh-Niasar, M., Azarderakhsh, R., and Mozaffari-
Kermani, M. (2021). Cryptographic accelerators for
digital signature based on ed25519. IEEE Transac-
tions on Very Large Scale Integration (VLSI) Systems,
29(7):1297–1305.
Boneh, D., Drijvers, M., and Neven, G. (2018).
Bls multi-signatures with public-key ag-
gregation. URL: https://crypto. stanford.
edu/dabo/pubs/papers/BLSmultisig. html.
Castro, M., Liskov, B., et al. (1999). Practical byzantine
fault tolerance. In OsDI, volume 99, pages 173–186.
Chu, H., Gerhart, P., Ruffing, T., and Schr
¨
oder, D. (2023).
Practical schnorr threshold signatures without the al-
gebraic group model. In Annual International Cryp-
tology Conference, pages 743–773. Springer.
Huang, B., Peng, L., Zhao, W., and Chen, N. (2022).
Workload-based randomization byzantine fault toler-
ance consensus protocol. High-Confidence Comput-
ing, 2(3):100070.
Kramer, M., Gerstmayer, F., and Hausladen, J. (2018).
Evaluation of libraries and typical embedded systems
for ecdsa signature verification for car2x communi-
cation. In 2018 IEEE 23rd International Conference
on Emerging Technologies and Factory Automation
(ETFA), volume 1, pages 1123–1126. IEEE.
Liu, X. and Zhu, J. (2024). An improved practical byzantine
fault tolerance algorithm for aggregating node prefer-
ences. Scientific Reports, 14(1):31200.
Lyons, D. M. and Rahouti, M. (2023). Wavn: Wide area
visual navigation for large-scale, gps-denied environ-
ments. In 2023 IEEE International Conference on
Robotics and Automation (ICRA), pages 2039–2045.
IEEE.
Paykari, N., Alfatemi, A., Lyons, D. M., and Ra-
houti, M. (2025a). Integrating robotic naviga-
tion with blockchain: A novel pos-based approach
for heterogeneous robotic teams. arXiv preprint
arXiv:2505.15954.
Paykari, N., Lyons, D., and Rahouti, M. (2024). Ro-
bostake: Pioneering cooperative navigation with a
novel blockchain-powered proof-of-stake in robotic
teams. In 2024 IEEE International Conference on
Omni-layer Intelligent Systems (COINS), pages 1–4.
IEEE.
Paykari, N., Rahouti, M., and Lyons, D. M. (2025b). A
novel blockchain-driven proof-of-stake model for co-
operative navigation in visual homing robotic teams.
Distributed Ledger Technologies: Research and Prac-
tice.
Sadikin, M. A. and Wardhani, R. W. (2016). Implementa-
tion of rsa 2048-bit and aes 256-bit with digital signa-
ture for secure electronic health record application. In
2016 International Seminar on Intelligent Technology
and Its Applications (ISITIA), pages 387–392. IEEE.
Wu, Y., Wu, L., and Cai, H. (2023). Reinforced practi-
cal byzantine fault tolerance consensus protocol for
cyber physical systems. Computer Communications,
203:238–247.
Yang, Z. and Bajwa, W. U. (2019). Byrdie: Byzantine-
resilient distributed coordinate descent for decentral-
ized learning. IEEE Transactions on Signal and In-
formation Processing over Networks, 5(4):611–627.
TISAS 2025 - Special Session on Trustworthy and Intelligent Smart Agriculture Systems: AI, Blockchain, and IoT Convergence
644
