
Differential Kinematics Control Using Circles as Bivectors of Conformal
Geometric Algebra
Julio Zamora-Esquivel
1 a
, Alberto Jaimes Pita
1 b
, Edgar Macias-Garcia
1 c
, Javier Felip-Leon
1 d
,
David Gonzalez-Aguirre
1 e
and Eduardo Bayro-Corrochano
2 f
1
Intelligent System Research, Intel Labs, Zapopan, Jalisco, Mexico
2
Poznan University of Technology, Poznan, Poland
Keywords:
Grasping, Kinematics, Manipulation Planning.
Abstract:
In this paper, we propose a modern mathematical framework to model a robotic arm and compute the dif-
ferential kinematics of its end effector, which is represented as a circle in a three-dimensional space. This
circle is described using a bi-vector within the context of conformal geometric algebra. By utilizing a circle
to characterize the grasping pose on the object and the pose of the end-effector, we develop a differential
kinematics-based control law that guides the end-effector to minimize the error between both circles. The cir-
cle representation offers three degrees of freedom for the center, two degrees for orientation, and one degree
for the radius, allowing us to effectively describe the end-effector pose using a single geometric primitive. Our
approach allows for simultaneous adjustment of both the position and orientation of the end effector.
1 INTRODUCTION
Visually guided grasping is a well-established prob-
lem that has been addressed through various ap-
proaches (Fang et al., 2020), (Wei et al., 2021),
(Fourmy et al., 2023), (Farias et al., 2021). Typically,
it involves developing a control law to adjust the joint
angles of a robotic arm to minimize the error between
the end-effector and the target pose, defined by the
orientation and position, where most of the state-of-
the-art algorithms often tackle this problem by con-
trolling position and orientation independently (Ma
et al., 2020). In contrast, our proposed algorithm em-
ploys a single geometric primitive to simultaneously
describe both the position and orientation of the end-
effector and the target goal. This geometric primitive
is efficiently represented as a bivector within the Con-
formal Geometric Algebra (CGA) framework.
As a practical example, we model the kinematics and
differential kinematics of the 7-DoF Franka robot arm
a
https://orcid.org/0000-0002-0226-0047
b
https://orcid.org/0009-0009-8339-6605
c
https://orcid.org/0000-0003-2571-9460
d
https://orcid.org/0000-0002-2115-4610
e
https://orcid.org/0000-0002-5032-8261
f
https://orcid.org/0000-0002-4738-3593
and the Unitree G1 humanoid robot. Our control law,
grounded in the differential kinematics of circles, en-
ables the efficient displacement of both end effectors
to a set of predefined target poses with a cylindrical
geometry p
ob j
= [x,y, z, α, β] (Figure 1).
Figure 1: End-effector pose of an object described with a
circle Z
p
∈ G
4,1
in conformal geometric algebra.
Zamora-Esquivel, J., Pita, A. J., Macias-Garcia, E., Felip-Leon, J., Gonzalez-Aguirre, D. and Bayro-Corrochano, E.
Differential Kinematics Control Using Circles as Bivectors of Conformal Geometric Algebra.
DOI: 10.5220/0013945500003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 585-592
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
585
The rest of the paper is organized as follows: Sec-
tion 2 provides a brief introduction to Conformal Ge-
ometric Algebra and the representation of circles as
geometric entities. In Section 3, we present our pro-
posed methodology to model and solve the differen-
tial kinematics of end-effectors using circles in Con-
formal Geometric Algebra. Section 4 introduces a
novel approach for applying a control law based on
these techniques, with different practical implemen-
tations on Section 5. Finally, Section 6 discusses the
conclusions and potential directions for future work.
2 CLIFFORD ALGEBRA AND
CONFORMAL GEOMETRY
Geometric algebra (G
4,1
) provides an elegant frame-
work for expressing conformal geometry. To illus-
trate this, we adopt the formulation presented in (Li
et al., 2001) and demonstrate how the Euclidean vec-
tor space (R
3
) is represented within (R
4,1
). This
space is characterized by an orthonormal vector basis
(e
1
,e
2
,e
3
,e
4
,e
5
), with the properties of the Clifford
product detailed in Table 1.
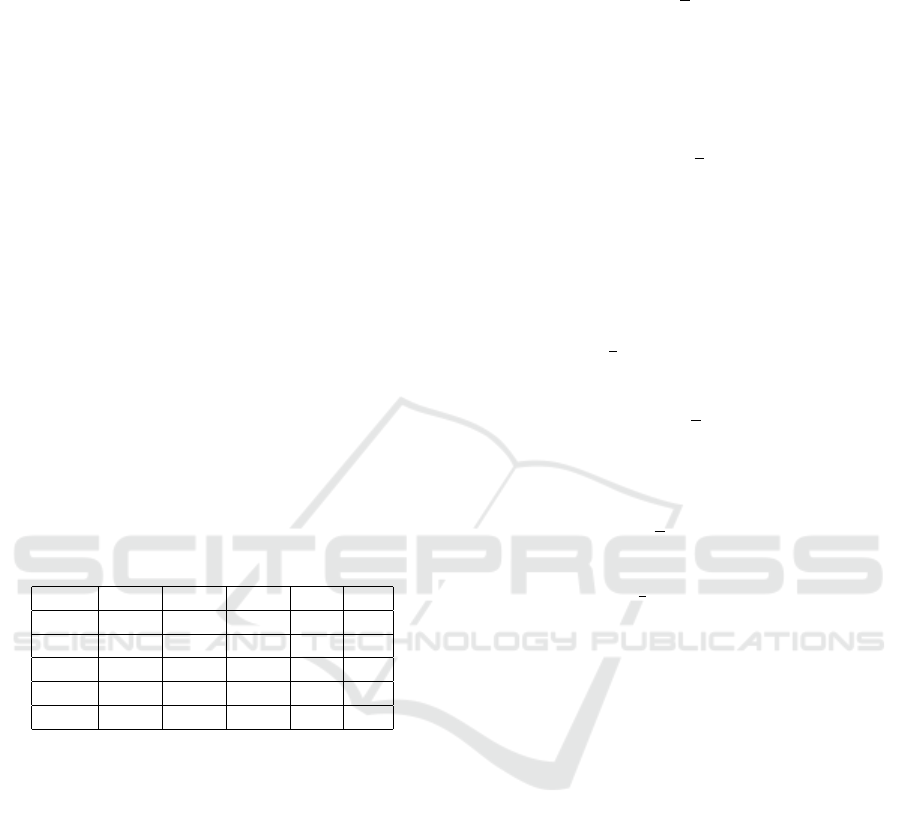
Table 1: Clifford product for blades in Conformal Geomet-
ric Algebra (G
4,1
).
Basis e
1
e
2
e
3
e
4
e
5
e
1
1 e
12
−e
31
e
14
e
15
e
2
−e
12
1 e
23
e
24
e
25
e
3
e
31
−e
23
1 e
34
e
35
e
4
e
41
e
42
e
43
1 E
e
5
e
51
e
52
e
53
−E −1
Where e
i j
= e
i
∧ e
j
is a bivectorial basis, while e
23
,
e
31
and e
12
are the Hamilton basis. A unit Euclidean
pseudo-scalar I
e
, a pseudo-scalar I
c
and the bivector
E can be defined by:
I
e
: = e
1
∧ e
2
∧ e
3
, (1)
E : = e
4
∧ e
5
= e
4
e
5
, (2)
I
c
: = I
e
∧ E = I
e
E. (3)
2.1 Geometric Entities
Within this mathematical framework, it is possible to
represent various geometric entities such as points,
lines, planes, circles, and spheres in a 3D space (For
a detailed description, please refer to Bayro (Bayro-
Corrochano, 2018)). This framework enables the rep-
resentation of a point at infinity (e
∞
), and the origin
(e
o
):
e
∞
= e
4
+ e
5
, (4)
e
0
=
1
2
(e
5
− e
4
), (5)
which can be used to define other geometric entities,
and apply transformations between them. A 3D Eu-
clidean Point (x
e
∈ G
3
) can be mapped to a conformal
point (x
c
∈ G
4,1
) through the transformation:
x
c
= x
e
+
1
2
x
2
e
e
∞
+ e
0
. (6)
2.2 Spheres and Planes
The equation of a sphere of radius ρ centered at point
p
e
∈ R
n
can be written as:
(x
e
− p
e
)
2
= ρ
2
, (7)
since x
c
· y
c
= −
1
2
(x
e
− y
e
)
2
, we can rewrite the for-
mula above in terms of homogeneous coordinates as:
x
c
· p
c
= −
1
2
ρ
2
, (8)
by considering that x
c
· e
∞
= −1, we can factor the
expression above to:
x
c
· (p
c
−
1
2
ρ
2
e
∞
) = 0. (9)
Which finally yields the simplified equation for the
sphere as s = p
c
−
1
2
ρ
2
e
∞
(note from this equation
that a point is just a sphere with zero radius). Al-
ternatively, the dual of the sphere is represented as
(n + 1)-vectors s
∗
= sI
−1
. The advantage of the dual
form is that the sphere can be directly computed from
four points (in 3D) as:
s
∗
= x
c
1
∧ x
c
2
∧ x
c
3
∧ x
c
4
. (10)
If we replace one of these points for the point at infin-
ity we get:
π
∗
= x
c
1
∧ x
c
2
∧ x
c
3
∧ e
∞
. (11)
So, as π becomes in the standard form:
π = π
∗
I
−1
, (12)
π = n + de
∞
, (13)
where n is the normal vector and d represents the
Hesse distance.
2.3 Circles and Lines
A circle z can be regarded as the intersection of two
spheres s
1
and s
2
as z = (s
1
∧ s
1
). The dual form of
the circle can be expressed by three points:
z
∗
= x
c
1
∧ x
c
2
∧ x
c
3
. (14)
COBOTA 2025 - Special Session on Bridging the Gap in COllaborative roBOtics: from Theory to real Applications
586
Similar to the case of planes, lines can be defined by
circles passing through the point at infinity as:
L
∗
= x
c
1
∧ x
c
2
∧ e
∞
, (15)
while the standard form of the line (in 3D) can be ex-
pressed by:
L = l + e
∞
(t · l). (16)
The line in the standard form is a bivector, and it has
six parameters (Plucker coordinates), but just four de-
grees of freedom. A full list of entities is described in
Tables 2 and 3.
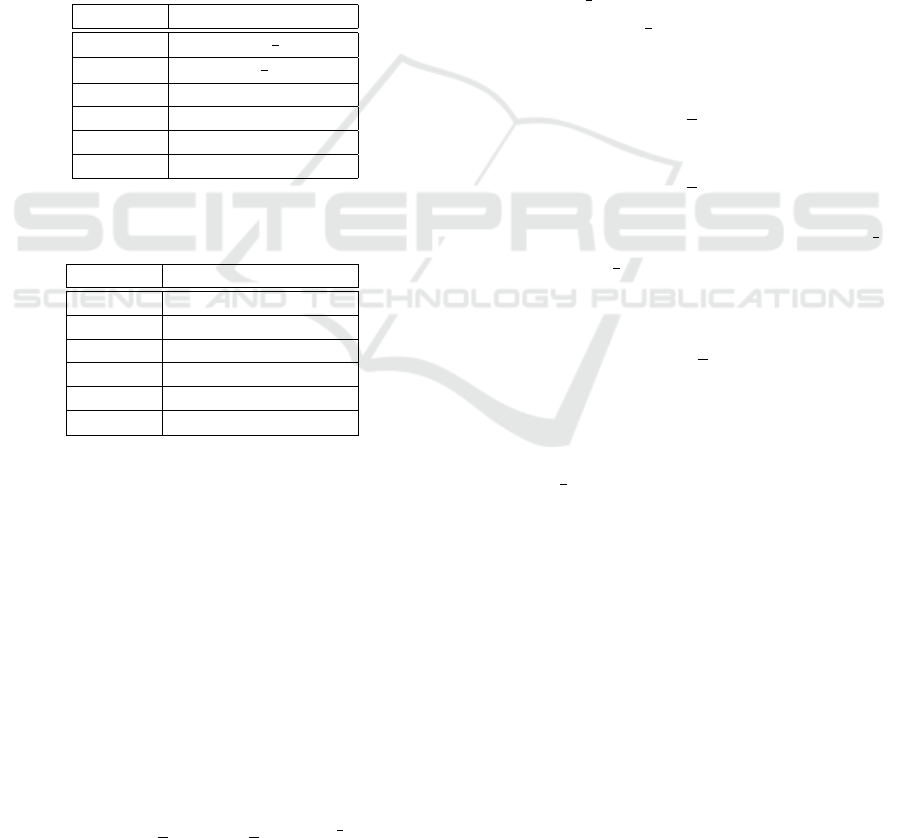
Table 2: Representation of conformal geometric using the
standard representation.
Entity Representation
Sphere s = p −
1
2
ρ
2
e
∞
Point x
c
= x
e
+
1
2
x
2
e
e
∞
+ e
0
Line L = π
1
∧ π
2
Plane π = n + de
∞
Circle z = s
1
∧ s
2
Pair of P. P
p
= s
1
∧ s
2
∧ s
3
Table 3: Representation of conformal geometric entities us-
ing the dual representation.
Entity Dual Representation
Sphere s
∗
= x
1
∧ x
2
∧ x
3
∧ x
4
Point x
∗
= s
1
∧ s
2
∧ s
3
∧ s
4
Line L
∗
= x
1
∧ x
2
∧ e
∞
Plane π
∗
= x
1
∧ x
2
∧ x
3
∧ e
∞
Circle z
∗
= x
1
∧ x
2
∧ x
3
Pair of P. P
∗
p
= x
1
∧ x
2
3 DIFFERENTIAL KINEMATICS
OF CIRCLES
In conformal geometric algebra, the forward kinemat-
ics of the end-effector circle z
p
∈ R
4,1
is given by
(Hildenbrand et al., 2008):
z
′
p
=
n
∏
i=1
M
i
z
p
n
∏
i=1
e
M
n−i+1
. (17)
In this equation motors M are used to represent 3D
rigid transformations as the motor algebra does (E.
and K
¨
ahler, 2000):
M = cos
θ
2
− sin
θ
2
L = e
−
θ
2
L
, (18)
now we produce an expression for differential kine-
matics through the total differentiation of (17) as fol-
lows:
dz
′
p
=
n
∑
j=1
∂
q
j
n
∏
i=1
M
i
z
p
n
∏
i=1
e
M
n−i+1
!
dq
j
, (19)
where
e
M is the motor conjugate. Each term of the
sum is the product of two functions in q
j
, then the
differential yields:
dz
′
p
=
n
∑
j=1
"
∂
q
j
j
∏
i=1
M
i
!
n
∏
i= j+1
M
i
z
p
n
∏
i=1
e
M
n−i+1
+
n
∏
i=1
M
i
z
p
n− j
∏
i=1
e
M
n−i+1
∂
q
j
n
∏
i=n− j+1
e
M
n−i+1
!#
dq
j
. (20)
Since M = e
−
1
2
qL
, the differential of the motor can be
defined as d(M) = −
1
2
MLdq. Thus, we can write the
partial differential of the motor’s product as follows:
∂
q
j
j
∏
i=1
M
i
!
= −
1
2
j
∏
i=1
M
i
L
j
= −
1
2
j−1
∏
i=1
M
i
!
L
j
M
j
.
(21)
In a similar approach, the differential of the
e
M = e
1
2
qL
give us d(
e
M) =
1
2
MLdq, and the differential of the
product is:
∂
q
j
n
∏
i=n− j+1
e
M
n−i+1
!
=
1
2
e
M
j
L
j
n
∏
i=n− j+2
e
M
n−i+1
,
(22)
by replacing (21) and (22) in (20) we get:
dz
′
p
= −
1
2
n
∑
j=1
"
j−1
∏
i=1
M
i
L
j
n
∏
i= j
M
i
z
p
n− j+1
∏
i=1
e
M
n−i+1
!
−
n
∏
i= j
M
i
z
p
n− j+1
∏
i=1
e
M
n−i+1
!
L
j
!
j−1
∏
i=1
e
M
j−i
#
dq
j
.
(23)
By definition the product ”◦” of two bivectors is given
by:
A ◦ B = AB − BA (24)
Using the equation (24) we can simplify (23), since L
and Z
p
are bivectors then we can rewrite (23) as:
dz
′
p
=
n
∑
j=1
"
j−1
∏
i=1
M
i
!
n
∏
i= j
M
i
z
p
n− j+1
∏
i=1
e
M
n−i+1
!
◦ L
j
!
j−1
∏
i=1
e
M
j−i
#
dq
j
.
(25)
Differential Kinematics Control Using Circles as Bivectors of Conformal Geometric Algebra
587

The product of i = [1, j − 1] and i = [ j,n] is equal to
the product of i = [1,n]. Also for
e
M, equation (25)
can be written as:
dz
′
p
=
n
∑
j=1
n
∏
i=1
M
i
z
p
n
∏
i=1
e
M
n−i+1
◦
j−1
∏
i=1
M
i
L
j
j−1
∏
i=1
e
M
j−i
dq
j
.
(26)
Using the equation of the direct kinematics (17), we
can simplify (26) as:
dz
′
p
=
n
∑
j=1
"
z
′
p
◦
j−1
∏
i=1
M
i
L
j
j−1
∏
i=1
e
M
j−i
!#
dq
j
. (27)
The equation of forward kinematics of circles also ap-
plies for Lines, in this way we can use (17) to define
the transformed line L
′
in terms of L as follows:
L
′
j
=
j−1
∏
i=1
M
i
L
j
j−1
∏
i=1
e
M
j−i
. (28)
Finally, by replacing (28) on (27) we get a very com-
pact expression of differential kinematics:
dz
′
p
=
n
∑
j=1
z
′
p
◦ L
′
j
dq
j
. (29)
4 KINEMATIC CONTROL OF A
ROBOT ARM
In this section, we first define a control law based on
the orientation of the end effector, followed by a con-
trol law based on its position. These two aspects are
then integrated into a unified control law that simulta-
neously addresses both position and orientation, uti-
lizing the circle representation to model the pose of
the end-effector and the desired position (Figure 2).
Figure 2: Target circle estimated in the manipulated object.
This kinematic control is formulated as a training rule
for a neural network, utilizing gradient descent to ad-
just the weights, specifically the joint angles (q). The
primary objective is to adjust the values of q to min-
imize the error, defined as the difference between the
end-effector’s orientation and the target orientation,
as expressed by the following equation:
E
o
=
1
2
(Z
t
− Z
p
)
2
. (30)
In this context, (Z
t
) represents the target circle, while
(Z
p
) denotes the circle generated by the gripper as the
end-effector, which describes the pose of the robotic
arm defined by the joints q. This relationship is es-
tablished through the direct kinematics equation, as
given by equation (17). To adjust the joint angles (q)
and minimize the error (E), the partial derivative is
computed as follows:
∂E
o
∂q
i
= −(Z
t
− Z
p
)
∂Z
p
∂q
i
. (31)
In previous sections the differential kinematics was
formulated in terms of the rotation axis L
i
as:
∂E
o
∂q
i
= −(Z
t
− Z
p
) ·
Z
p
◦ L
′
i
, (32)
now, to create a control law for the position of the end-
effector the error given by the delta in position will be
computed as:
E
p
=
1
2
(P
t
− X
p
)
2
, (33)
where P
t
represents the target position and X
p
repre-
sents the position of the end effector. Here X
p
is also
the center of the circle and it can be also replaced by
a sphere S
p
with the center in the center of the circle:
S
p
= Z
p
/π
p
, (34)
where π
p
is the plane of the circle given by π
∗
p
= Z
∗
p
∧
e
∞
. Then the error can be rewritten as:
E
p
=
1
2
(P
t
− S
p
)
2
. (35)
The training rule to minimize the error E
p
by adjust-
ing the joint angles q can be written as:
∂E
p
∂q
i
= −(P
t
− S
p
)
∂S
p
∂q
i
. (36)
According to (Bayro-Corrochano and Zamora-
Esquivel, 2007) the differential kinematics of points
and spheres can be computed using [S
p
· L
′
i
]. Then we
can simplify equation (36) as:
∂E
p
∂q
i
= −(P
t
− S
p
) ·
Z
p
π
−1
p
· L
′
i
. (37)
COBOTA 2025 - Special Session on Bridging the Gap in COllaborative roBOtics: from Theory to real Applications
588

Thus, we can merge the equations (37) and (32), as
they are vectors and bivectors, respectively. This
merge is achieved through a weighted sum by incor-
porating the learning rates (η
o
) and (η
p
), which, in
control terms, represent the gain of the control law.
η
p
∂E
p
∂q
i
+
η
o
∂E
o
∂q
i
= − η
p
(P
t
− S
p
) ·
Z
p
π
−1
p
· L
′
i
− η
o
(Z
t
− Z
p
) ·
Z
p
◦ L
′
i
,
(38)
by reordering the terms:
η
p
∂E
p
∂q
i
+
η
o
∂E
o
∂q
i
= − (η
p
(P
t
− S
p
) + η
o
(Z
t
− Z
p
))
·
Z
p
(π
−1
p
+ 1)L
′
i
,
(39)
the rule to update the joint angles can be written as:
∆q
i
=(η
p
(P
t
− S
p
) + η
o
(Z
t
− Z
p
))
·
Z
p
(π
−1
p
+ 1)L
′
i
,
(40)
where S
p
, S
t
are the spheres, and P
t
is the center of
the sphere S
t
.
5 APPLICATIONS
In this section, we implement the differential kine-
matics and control laws described in the previous sec-
tions to model and manipulate the position and orien-
tation of the end-effector for different robots, includ-
ing both single and bi-manual grasping scenarios.
5.1 7DOF Franka Emika Robot Arm
As a first experiment, we consider the 7-DoF Franka
Emika robot arm. By employing the equation (17) we
can model the forward kinematics of the end-effector
by employing a set of lines and motors over each joint,
with a circle entity placed on the end-effector (Fig-
ure 3). This formulation allows to describe the posi-
tion and orientation of the end-effector in terms of the
joints position.
To define the desired position and orientation of
the end effector, we developed a Mixed Reality En-
vironment called Roomersive. This environment has
the capability to display robots and virtual objects in
augmented reality, facilitating real-time interactions
with other users within the same scene (Figure 4).
To enable the interaction between users and the sim-
ulated robot, we implemented a detection system
composed of four Deep Learning Neural Networks
Figure 3: Robot arm Axis represented by lines L
i
, each one
of those lines is given by a Bivector of conformal geometry.
Models running in parallel, trained for scene un-
derstanding; human pose estimation (based on (Cao
et al., 2017)), face re-identification (based on FaceNet
(Schroff et al., 2023)), object recognition (based on
(Wang et al., 2023)), and action recognition (Archana
and Hareesh, 2021). Each model predicts a set of
2D keypoints, which are then converted to 3D and
mapped into the immersive space using data from a
RealSense depth camera. Additionally, this innova-
tive simulator enables the connection of a real robot
with its digital twin within the immersive environ-
ment, by sending the calculated joints to the real robot
and reflecting the current real position on the simula-
tor. This feature allows users to manipulate the real
robot by interacting with the virtual object.
Figure 4: Roomersive creates a digital twin of a real robot
within an immersive environment, allowing users to inter-
act with it and transmit information to a real robot located
elsewhere.
To enable the interactions between users and virtual
objects, we employ procedural geometry; This geom-
etry is generated using the Hull and Domain shaders
of DX11/DX12 (Corporation, 2023) on the GPU. Es-
sentially, the depth image is mapped as a texture to the
GPU, and an 8 × 13 array of patches is created, each
with four control points. In the domain shader, each
Differential Kinematics Control Using Circles as Bivectors of Conformal Geometric Algebra
589

Figure 5: Procedural Geometry created using Depth infor-
mation from Realsense Camera.
patch is tessellated up to 64 × 64, producing 4,096
vertices. For each generated vertex, we sample the
depth information, which is back-propagated to gen-
erate 851,968 triangles per frame (Figure 5).
Rendering integration is achieved by creating a
virtual camera with identical intrinsic parameters and
positioning as the real camera. The image is then
copied to the back buffer, and the procedural geom-
etry is rendered with transparency to facilitate the vi-
sualization (Figure 6). This allows virtual objects to
be occluded by or occlude real objects based on their
positions. The proposed control law is applied in two
scenarios: first, to remotely manipulate the robot arm
by grasping and moving the virtual end-effector; and
second, to grasp objects using a grasping circle lo-
cated in the same position than the real objects.
Figure 6: Procedural geometry in blue, used to set the scene
depth on the 3D pipeline.
5.1.1 Immersive Remote Control
In this application we use human pose estimation and
depth information to identify the wrist position in 3D,
and based on the forward kinematics we estimate the
position and orientation of the robot’s end effector
Figure 7: Wrist detection modeled with a circle, used to pull
the virtual robot arm.
described with a circle, when the direct distance be-
tween the wrist circle and the end effector circle is
less than a threshold and the close palm action is de-
tected on the hand, the control law (40) is activated,
this makes the robot follow the hand movement, it is
important to note that we do not require the use of
manual controls that allow the user to manipulate the
objects.
Figure 8: Object detected by our NN in 3D and the circle of
grasping in the Mixed reality space.
5.1.2 Object Grasping
In this scenario, we employ a YOLO-based neural
network to detect objects, using a bottle as an illus-
trative example (Figure 8). Once the object is located
in 3D and isolated within a bounding cube, the tar-
get circle for the object is estimated. This initiates
the control law 40, which guides the robot to grasp
the object by simultaneously aligning its position and
orientation.
5.2 Unitree G1, Humanoid Robot
As an additional experiment, we constructed the Uni-
tree G1 humanoid robot using the same forward kine-
matics procedure applied to the Franka Emika robot
(equation ((17))). We then implemented various in-
COBOTA 2025 - Special Session on Bridging the Gap in COllaborative roBOtics: from Theory to real Applications
590

teraction levels in our simulator to manipulate the po-
sition of the joints based on the user’s body pose in-
formation. To facilitate this, we developed models to
identify when the user opens or closes their hands.
Upon detecting that a joint is ”grasped,” we calculate
a pair of circles based on the position and orientation
of the selected joint and the hand. These circles are
then adjusted using our control law to minimize the
error between them (Figure 9).
Figure 9: Interaction level 1: The user can ”grasp” the joint
that he wants to adjust.
Our differential kinematics algorithm can also be ap-
plied to track the human body, adjusting joint angles
to accommodate multiple targets. In this approach,
each joint incrementally adjusts the preceding joints
to achieve the desired position (Figure 10). Addition-
ally, a single target circle can be used to manipulate
multiple end effectors simultaneously, such as in bi-
manual grasping. In the experiment shown in Figure
11, a single target position is defined for both hands
of the robot, enabling it to ”grasp” the object. In this
setup, each joint receives an average of the deltas from
the errors of the two end effectors.
Figure 10: Interaction level 2: Humanoid robot mimicking
human movements using the references of the body pose.
Additionally, other interaction levels can be imple-
mented, for example, by choose the action to do using
the immersive space (Figure 12).
Figure 11: Interaction level 3: A single target desired pose
is defined for both hands.
Figure 12: When the user interacts with an object, a pop-up
virtual menu appears to select the desired action.
5.3 Results Discussion
The aim of this work is not to compete with the state-
of-the-art in terms of speed; rather, it introduces a
modern representation of the end-effector and control
law using circles on the geometric algebra framework,
resulting in equations that are more computationally
efficient. Traditional robot kinematics, typically cal-
culated using matrices, require 64 MAC operations
to concatenate two transformations, whereas confor-
mal geometry rotations require only 16 MAC opera-
tions for concatenation. This control law simultane-
ously addresses both rotation and position, enhancing
efficiency. Our immersive reality system eliminates
the need for handheld controllers and virtual reality
glasses, offering a more natural interaction experi-
ence. Figure 13 illustrates the trajectory graph of the
user’s hand in 3D compared to the trajectory of the
end-effector after applying the control law. Human
pose detection, action recognition, and object detec-
tion operate at 60 fps, alongside the procedural gen-
eration and rendering of virtual objects and robots.
Differential Kinematics Control Using Circles as Bivectors of Conformal Geometric Algebra
591

Figure 13: Internal circle components converging after 240
frames (4 seconds).
6 CONCLUSIONS
In this work, the authors aim to demonstrate the fea-
sibility of the new mathematical representation and
control algorithm. By avoiding the use of matrices for
computing kinematics and control, they introduce a
novel formulation based on dual quaternions as bivec-
tors. The authors do not intend to compare perfor-
mance with traditional methods, as matrix operations
are typically accelerated on GPUs, whereas Clifford
algebras are not. Although this method can reduce
MAC operations, the lack of acceleration or paral-
lelization means that results may be comparable in
terms of time, depending on the hardware used. A
separate study focusing on performance, metrics, and
hardware using both approaches will be presented in a
subsequent article. This work is limited to cylindrical
shapes that can be gripped from any position along the
circle. To ensure a unique grip pose, a parabola could
be used instead of a circle, thereby adding additional
degrees of freedom to describe it. This would necessi-
tate the use of Quaternion Geometric Algebra (QGA)
(Zamora-Esquivel, 2014) to calculate the kinematics
and control. We are considering this approach for fu-
ture work.
REFERENCES
Archana, N. and Hareesh, K. (2021). Real-time human ac-
tivity recognition using resnet and 3d convolutional
neural networks. In 2021 2nd International Con-
ference on Advances in Computing, Communication,
Embedded and Secure Systems (ACCESS), pages 173–
177. IEEE.
Bayro-Corrochano, E. (2018). Geometric algebra applica-
tions vol. I: Computer vision, graphics and neurocom-
puting. Springer.
Bayro-Corrochano, E. and Zamora-Esquivel, J. (2007). Dif-
ferential and inverse kinematics of robot devices using
conformal geometric algebra. Robotica, 25(1):43–61.
Cao, Z., Simon, T., Wei, S. E., and Sheikh, Y. (2017). Real-
time multi-person 2d pose estimation using part affin-
ity fields. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 7291–
7299.
Corporation, I. (2023). Directx 12 ultimate on intel® arc™
graphics. Intel. https://www.intel.com/content/www/
us/en/architecture-and-technology/visual-technolog
y/directx-12-ultimate.html.
E., B.-C. and K
¨
ahler, D. (2000). Motor algebra approach
for computing the kinematics of robot manipulators.
Journal of Robotics Systems, 17(9):495–516.
Fang, W., Chao, F., Lin, C. M., Zhou, D., Yang, L.,
Chang, X., and Shang, C. (2020). Visual-guided
robotic object grasping using dual neural network con-
trollers. IEEE Transactions on Industrial Informatics,
17(3):2282–2291.
Farias, C. D., Adjigble, M., Tamadazte, B., Stolkin, R., and
Marturi, N. (2021). Dual quaternion-based visual ser-
voing for grasping moving objects. In 2021 IEEE 17th
International Conference on Automation Science and
Engineering (CASE), pages 151–158. IEEE.
Fourmy, M., Priban, V., Behrens, J. K., Mansard, N., Sivic,
J., and Petrik, V. (2023). Visually guided model pre-
dictive robot control via 6d object pose localization
and tracking. arXiv preprint, arXiv:2311.05344.
Hildenbrand, D., Zamora, J., and Bayro-Corrochano, E.
(2008). Inverse kinematics computation in computer
graphics and robotics using conformal geometric alge-
bra. Advances in applied Clifford algebras, 18:699–
713.
Li, H., Hestenes, D., and Rockwood, A. (2001). General-
ized homogeneous coordinates for computational ge-
ometry. In Somer, G., editor, Geometric Computing
with Clifford Algebras, pages 27–52. Springer-Verlag
Heidelberg.
Ma, Y., Liu, X., Zhang, J., Xu, D., Zhang, D., and Wu,
W. (2020). Robotic grasping and alignment for small-
size components assembly based on visual servoing.
The International Journal of Advanced Manufactur-
ing Technology, 106:4827–4843.
Schroff, F., Kalenichenko, D., and Philbin, J. (2023).
Facenet: A unified embedding for face recognition
and clustering. In The Computer Vision Foundation.
Retrieved 4 October 2023.
Wang, C. Y., Bochkovskiy, A., and Liao, H. Y. M. (2023).
Yolov7: Trainable bag-of-freebies sets new state-of-
the-art for real-time object detectors. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 7464–7475.
Wei, H., Pan, S., Ma, G., and Duan, X. (2021). Vision-
guided hand–eye coordination for robotic grasping
and its application in tangram puzzles. AI, 2(2):209–
228.
Zamora-Esquivel, J. (2014). G 6, 3 geometric algebra; de-
scription and implementation. Advances in Applied
Clifford Algebras, 24(2):493–514.
COBOTA 2025 - Special Session on Bridging the Gap in COllaborative roBOtics: from Theory to real Applications
592
