
Intelligent Face and Person Classification Using Deep Learning
Approach for Surveillance
Rajasekaran Thangaraj
1
, P. Jaisankar
2
, Siva Prasath P.
1
, Suresh A.
1
and Surya Prakash V.
1
1
Department of Computer Science and Engineering, Nandha Engineering College, Erode, Tamil Nadu, India
2
Department of Mathematics, Nandha Engineering College, Erode, Tamil Nadu, India
Keywords: People Detection Age, Gender, People Monitoring On‑Board Surveillance.
Abstract: Person and face classification play a crucial role in various applications, including security surveillance,
demographic analysis, and personalized services. This study proposes a real-time analysis and classification
system using YOLOv11 and deep learning techniques. The model utilizes advanced object detection
capabilities to efficiently detect human faces in video streams, followed by a Convolutional Neural Network
(CNN)-based classifier for precise age and gender prediction. The system is designed to process live video
feeds with high accuracy and minimal latency, ensuring reliable classification in dynamic environments. The
integration of deep learning allows for feature extraction, improving classification performance across diverse
detection among face and person. The proposed approach is evaluated on benchmark datasets to assess its
effectiveness in real-world scenarios.
1 INTRODUCTION
More recently, machine learning approaches have
attained considerable success in the computer vision
applications, such as face recognition (Tuk, M., &
Pentland, A., 1991). Face recognition has two major
applications which are face identification and face
verification. In face identification, the facial images
of a person can be used for his or her identification,
while for face verification, a face image and identity
estimation are provided to the system to check the
belonging of the face image to a certain person (Parki,
et al, 2015). Detection accuracy is one of the biggest
issues related to face detection. The face scale differs
widely for the same image detector. (Taigman,
Y.,2014) Face and person detection is one of the most
basic tasks in computer vision with numerous
applications including security, surveillance,
biometric authentication, and human-computer
interaction (He, at el, 2016). Traditional object
detection
models, such as R-CNN, often struggle
with real-time performance due to their complex,
multi-stage processing. However, advancements in
deep learning have led to more efficient and accurate
models like the YOLO (You Only Look Once) series,
which are designed for high-speed object detection
YOLOv11, the latest iteration in this family,
introduces significant improvements in speed,
accuracy, and efficiency (Levi, G., & Hassner, T.
2015).With a more optimized architecture
incorporating C3K2 blocks for enhanced feature
extraction, SPFF (Spatial Pyramid Pooling Fast) for
better multi-scale detection, and C2PSA (Cross Stage
Partial with Spatial Attention) for improved focus on
critical areas, It excels in detecting faces and persons,
even in complex environments (Zhang, C., at el, 2015)
These advancements make it ideal for applications
requiring real-time detection with minimal
computational overhead (Xie, W., et al, 2018). This
implementation focuses on leveraging function for
accurate face and person detection using deep
learning techniques (Rodriguez, M, et al, 2011). By
training the model on well-labeled datasets and fine-
tuning it for improved performance, we can develop
a robust detection system that works efficiently in
real-world scenarios (Liu, W, et al, 2016). The
following sections will cover the methodology,
evaluation metrics, and implementation details,
highlighting how YOLOv11 can be effectively used
to detect faces and people in images and live video
streams (Kang, et al, 2018).
From a deep learning
perspective, utilizes a fully convolutional neural
network (CNN) backbone to extract hierarchical
features from input images. The model processes an
image in a single forward pass, predicting bounding
684
Thangaraj, R., Jaisankar, P., P., S. P., A., S. and V., S. P.
Intelligent Face and Person Classification Using Deep Learning Approach for Surveillance.
DOI: 10.5220/0013942000004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 5, pages
684-690
ISBN: 978-989-758-777-1
Proceedings Copyright © 2026 by SCITEPRESS – Science and Technology Publications, Lda.

boxes and class labels simultaneously Redmon, J., &
Farhadi, A. (2018). Unlike traditional detection
frameworks that generate multiple region proposals
before classification, it directly predicts the bounding
box coordinates, confidence scores, and class
probabilities within a single unified framework
(Howard, A. G., et al, 2017).This approach
significantly reduces computational overhead,
making it ideal for real-time detection tasks(Howard,
A. G., et al, 2017).The following sections will explore
the methodology, evaluation metrics, and
implementation details, demonstrating how deep
learning enables accurate and efficient face and
person detection (Ribeiro, et al,2019).
2 RELATED WORKS
Deep Learning Based Age and Gender Detection
Using Facial Images It focuses on classifying age and
gender from static facial images using two distinct
deep learning methodologies. The first approach
involves training a Convolutional Neural Network
(CNN) from scratch to extract and learn facial
features pertinent to age and gender. The second
approach employs transfer learning, where a pre-
trained deep learning model is fine-tuned on a facial
image dataset to enhance classification performance.
The study aims to improve accuracy in applications
such as surveillance systems, biometric
authentication, and personalized services (Zhang, C.,
at el, 2015). S. S. R. Depuru and S. S. S. R. Depuru
proposes a CNN-based approach for age and gender
classification of real-world facial images. It uses a
two-level CNN with preprocessing and is trained on
IMDb-WIKI, MORPH-II, and OIU-Adience datasets.
The model improves age classification by 16.6%
(exact) and 3.2% (one-off) and gender classification
by 3.0%. (Xie, W., et al, 2018) Crowd Detection and
Analysis for Surveillance Videos Using Deep
Learning" presents a CNN-based framework for
detecting crowds, counting individuals, and
analyzing age and gender for enhanced surveillance.
Related studies explore crowd analysis aspects,
including a CNN-BiLSTM model for abnormal
behavior detection, a smart camera for real-time
crowd monitoring, a YOLO V3-based system for
misbehavior detection, and deep learning methods for
distressful movement recognition and social distance
monitoring. These advancements improve
surveillance accuracy and efficiency using deep
learning (Rodriguez, M, et al, 2011).
Gender of human images in the form of 2D body
images is classified using deep neural networks
according to the elucidation provided in (Ijiga, A.
C.,at el, 2024). The end-to-enddesign prevents the
inclusion of extra biometric features that are always
useful in maintaining a high accurate gender
classification system. It includes the pipeline for
preprocessing the body images, as well as a 2D
labeled data set. This just shows that gender
determination from body images is as effective as
from face images since the modified ResNet50 has
higher accuracy.
Last, has proposed an Ensemble CNN for the real-
time gender recognition. For the gender classification,
the system achieves 95% of accuracy On IMDB
dataset. The Real-time model incorporates actual-
time processing with the effects offered. The average
response time for both single face image input and
multiple face image input for the quantity and the
quality of the response is about 0.5 seconds. In total,
these papers contribute to the improvement of the
face-based classification in terms of time, quality and
adaptability of the approach in other sets and real-
world settings for the purpose of the insights and
methodologies in further research and applications
(Redmon, J., & Farhadi, A., 2018)
Towards this purpose, a new network, namely,
gender CNN is devised for gender classification in
where IMDb-WIKI is used also. The goal of this work
is to extract facial features from real-world facial data;
dropout, which randomly drops-off some data, and
data augmentation to prevent overfitting are also part
of this. Presumably, the optimized architecture allows
to reach 84.8% of the correspondent value in the basic
architecture. New methods allow to classify the age
group beyond the demonstrated sample, as illustrated
by the classification of the age group that constitutes
only 84.8% of the population with 52.3% accuracy
(Rodriguez, M, et al, 2011). The CNN2ELM network
design has been proposed to achiev only with all the
best advanced training techniques integrated in the
network design.
Article: Video Analytics Using Deep Learning for
Crowd Analysis: A Review, M.R. Bhuiyan et al.
presents a complete overview of the current
surveillance systems using deep-learning-based
approaches for crowd detection, counting, and
behavior analysis. It goes into details about various
techniques including CNNs and regression-based
models that have been used for crowd density
prediction and crowd behavior anomalies detection.
Additionally, the review attempts to tackle issues
like occlusions and viewpoint distortions present in
crowded scenes (Liu, W, et al, 2016). G. Sreenu et al,
in their article “Intelligent Video Surveillance: A
Review Through Deep Learning Techniques for
Intelligent Face and Person Classification Using Deep Learning Approach for Surveillance
685

Crowd Analysis” explain the advances and
applications of Deep Learning for intelligent videos
surveillance with emphasis on object recognition,
action recognition, crowd analysis and detecting
violence in crowds. Different methodologies are
discussed, such as Convolutional Neural Networks
(CNNs) and regression-based models for density-
based crowd counting and anomaly detection, but it
fails to address how these models are implemented in
operations. The challenge of occlusions and
perspective distortions in crowded scenarios were
also tackled. (Kang, et al, 2018).
Jocher et al.,2023 have concentrated on
improving computational efficiency and accuracy.
They adopted innovative methods such as the
Extended Efficient Layer Aggregation Network (E-
ELAN) and Dynamic Label Assignment to bolster
the robustness of detection. The latest evolution in the
series, YOLOv8, capitalizes on these improvements
using C3K2 blocks, SPFF (Spatial Pyramid Pooling
Fast) and C2PSA (Cross Stage Partial with Spatial
Attention) to enhance detection performance,
particularly for small and occluded objects (e.g.
faces) – (Ijiga, A. C..et al, 2024)
Deep Neural Network Based Face Recognition
with Support Based Anchor Boxes In this paper, we
propose a Chi-Square-based face detection deep
neural network using a modified support-based
anchor boxes selection mechanism to improve
detection performance.
3 MATERIALS AND
METHODOLOGY
The YOLO (You Only Look Once) model family
revolutionized the world of models, constantly
challenging the limits of what was possible for a
model to achieve with its realistic speed together with
the exactness. For effective classification in
monitoring systems. All of these significantly
outperform others of YOLOv5, YOLOv7, and
YOLOv8 in higher accuracy (55% MAP+) and faster
processing speed (120+ FPS) in real-time. The model
also employs improved feature extraction methods
like SPP, FPN, and Transformer-based Convolutions,
thus improving its accuracy of detecting faces across
various circumstances. Different from its previous
versions, the YOLOv11 proposes a Decoupled
Detection Head with Dynamic Routing to enhance its
classifications, especially in complicated
environments such as low lighting and occlusions.
Its architecture is also optimized for both edge
devices and cloud platforms, which minimizes
computational load while still being high-performing.
For intelligent surveillance applications, these
developments in YOLOv11 render it to be the best
pick for such implementations all with a perfect
balance of speed and accuracy compared to its
predecessors.
YOLOV5: YOLOv5 is a PyTorch based object
detection model which makes it more user-friendly
and trainable when compared to the previous
versions like YOLOv4. It is fast and precise and can
run efficiently on both high-end GPUs and power-
sensitive devices, offering various sizes (small to
extra-large) for a balance of performance
requirements.
YOLOV7:YOLOv7 is a state-of-the-art object
detection model known for its high accuracy and
efficiency, designed to operate quickly in real-time
with low computational overhead. Also, it proposes
Extended Efficient Layer Aggregation Networks (E-
ELAN) to enhance feature learning and detection
accuracy, which significantly speeds up and
enhances detection performance compared to
YOLOv5. YOLOv7 is a real-time object detection
model that runs on very limited hardware.
YOLOV8:YOLOv8 is the latest and most
sophisticated iteration of the YOLO object detection
family, surpassing its predecessors in accuracy,
speed, and flexibility. Building upon FRCNN, it also
has a new efficient backbone, a fully decoupled
detection head, and an anchor-free framework,
making it suitable for real-time applications as well.
YOLOv8 has gained significant popularity in various
applications, including surveillance, autonomous
systems, healthcare, and industrial automation,
thanks to its impressive performance and user-
friendly nature, making it a preferred choice when
precision and computation efficiency are paramount.
3.1 YOLOV11
But the biggest question is: why YOLOV11?
YOLOV10 Faster, More Accurate and More
Efficient. Object detection, the task of detecting and
locating objects within an image, is one of the most
challenging problems in the area of computer vision.
However, traditional algorithms for object detection,
e.g., R-CNN framework, are often time-consuming,
as they generate all responses to the image in
advance and, later classify them, which is
unwarranted in the case of real-time applications.
These also carry the efficient architecture through
efficient C3K2 blocks, SPFF (Spatial Pyramid
Pooling Fast), and attention mechanism C2PSA the
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
686

goal of YOLOv11 is to enhance the accuracy of
object detection and small object detection and
maintain real-time inference speed. - Convolutional
Block-This Block is referred in the field as Conv
Block which lay down the given c,h,w through a 2D
Convolutional layer net then through a 2D Batch
Normalization layer. Bottle Neck-This is introduced
as a series of convolutions in one block with a
shortcut significance, which would define whether
you want to gain the residual stuff or not. As in
ResNet Block, if shortcut parameter was false, it
would simply ignore the residual. The back bone of
YOLOv11 is C3K2 block that is a strip down version
of the CSP (Cross Stage Partial) bottleneck present in
older versions. The C3K2 combination of
characteristic to difference, to channel each feed
forward pulls completely the information up and
down through the net. This block is different from
past models which failed to inspire balance number
of parameter and feature representation, as those
models took larger feature maps, run it through
couple convolutions, then concatenate back those
resulting feature maps. YOLOv11 still employs the
SPFF module (Spatial Pyramid Pooling Fast), which
allowed pooling features from parts of an image with
the same sides. The C2PSA (Cross Stage Partial with
Spatial Attention) The purpose of this block is to
implement attention mechanisms, where the model
tends to focus on the most relevant parts of an image,
especially whenever the image has the presence of
smaller and partially occluded objects; rather than
only focusing on areas in the feature maps. PyTorch
YOLOv11 demo implementation It really makes
clear to you them where you should start testing
object detection work on your images. Data
Collection and Pre-processing It starts with collecting
data and pre-processing for face and person detection
using YOLOv11 A collection of positive and
negative images of faces and non-faces are properly
annotated for us to train. Pre-processing steps,
including resizing, normalization, and data
augmentation techniques (flipping, rotation, and
brightness adjustment), are applied to these images to
enhance the robustness of the model. Next, the
YOLOv11 architecture is initialized, taking
advantage of its advanced components such as C3K2
blocks which improve feature extraction by splitting
and merging feature maps, and SPFF (Spatial
Pyramid Pooling Fast) which helps bring
improvements in multi-scale detection. Moreover,
C2PSA (Cross Stage Partial with Spatial Attention)
enables the model to focus on critical regions, thus, it
performs well in recognizing small and occluded
faces or persons.
The training data consists of well labelled
datasets and focused model optimization, along with
loss function to calculate losses during training, for
example, Loss function, like Complete
IoU(Intersection Over Union). It is the standard
Metrix to quantify the degree of overlap between two
boxes).) loss for accurate localization and binary
cross entropy for classification. To enhance accuracy,
particularly in recognizing faces and persons in
different environments, techniques such as transfer
learning and fine-tuning are utilized. On evaluation,
metric like mean Average Precision (mAP) are
utilized to measure detection accuracy and frames per
second (FPS) to make certain on real-time validation
after getting the model trained. The model is
subsequently deployed, handling images or live video
streams to accurately and quickly identify and locate
faces and individuals, making it an optimal solution
for surveillance, authentication, and crowd analysis
applications.
4 EVALUATION METRICS
In order to use YOLOv11 in detecting faces and
people, a number of evaluation metrics are
considered for accuracy, analysis, detection, and real-
time efficiency.
Mean Average Precision (mAP) mAP is a
commonly used metric for object detection, which
shows how well your object has localized and the
accuracy of detection. It is calculated by
interpolating the precision scores over a range of
different confidence threshold. Higher mAP value
indicates that the model did well in detection of faces
and person and classification of their labels. MAP =
mean average precision at multiple class and IoU
thresholds. This is the most common metric used by
other tasks of object detection, which can be a rough
guide of how well your model does in the moment of
dealing with precision and recall A higher mAP value
indicates improved object localizat ion and
classification, particularly for small and occluded
objects. Domain summary of C2PSA blocks and
C3K2 enhanced. Intersection Over Union (IoU):
measures the overlap between predicted bounding
box and ground truth box to be recognized as a true
positive, a prediction must have an IoU above a
threshold (generally between 0.5 - 0.95). CIoU
(CompleteIoU overcomes these limitations by
integrating more factors into the loss function. Figure
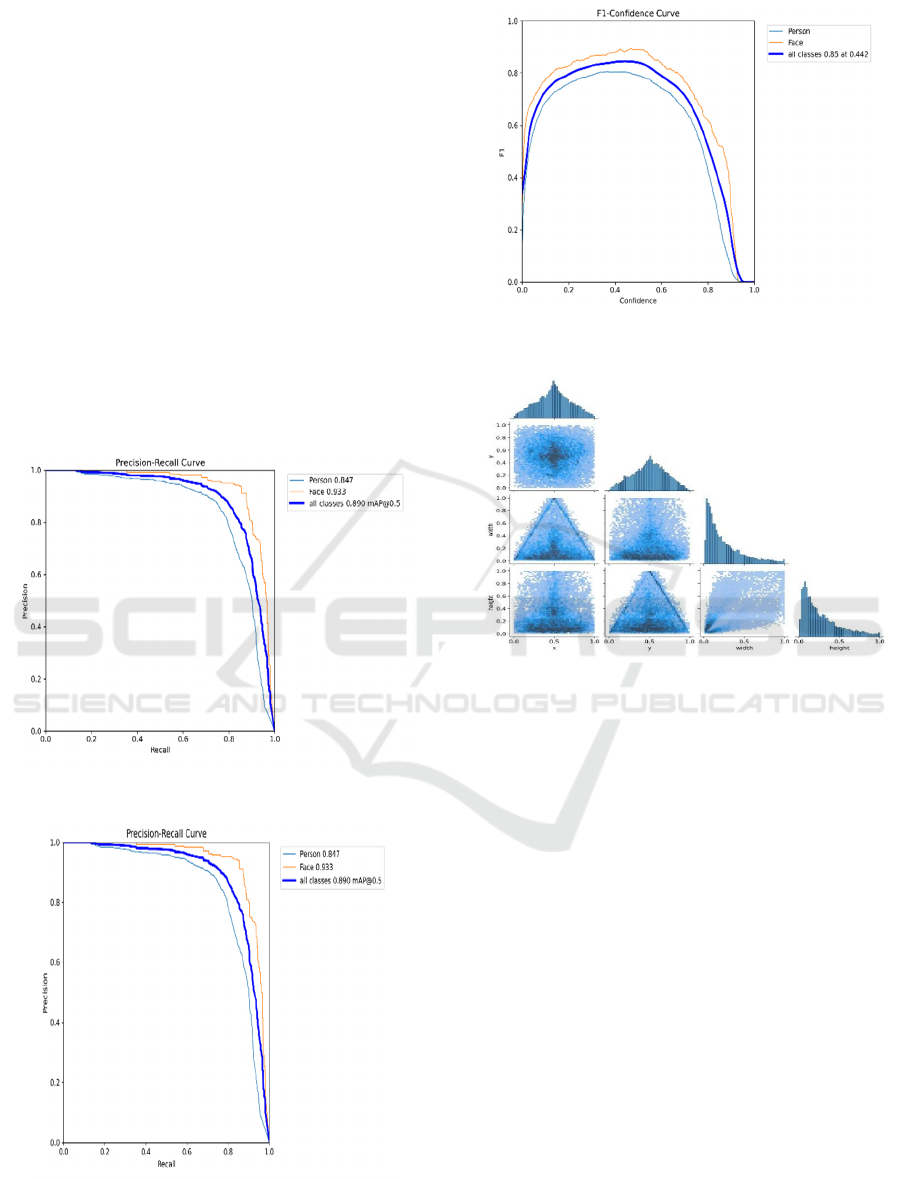
1 shows the Precision-Confidence Curve.
Flows Per Second (FPS): FPS is an indicator of
speed, translating how many frames the model can
Intelligent Face and Person Classification Using Deep Learning Approach for Surveillance
687
process per second. FPS (frames per second) While
FPS itself does not directly translate to performance,
a higher number generally leads to faster inference,
which is especially important for real-time
applications. Figure 2 shows the Precision-Recall
Curve.
F1 Score: The harmonic mean between precision
and recall is called the F1 score because it is a single
value that takes into account both the metrics.
Typically, these parameters help in avoiding the
misclassification of data, especially when false
negatives and false positives need to be the least in
the output, ensuring effective detection. Figure 3
shows the F1-Confidence-Curve.
For this detection we can precise the analysis by
deep learning with formal graph constrains as P-
curve, PR-curve, F1-Curve and combine the labels
correlations of the analysis. Figure 4 shows the Labels
Correlation.
Figure 1: Precision-Confidence Curve.
Figure 2: Precision-Recall Curve.
Figure 3: F1-Confidence-Curve.
Figure 4: Labels Correlation.
5 IMPLEMENTATIONS
Face and person detection with YOLOv11 start with
data preparation, which involves collecting a dataset
containing labeled images of faces and people. The
labels are processed by converting them into the
YOLOv11 specific format, which includes the class
index and pre-processed bounding box coordinates.
After preprocessing the data, the YOLOv11 model is
built up using the PyTorch framework. The third
design for us is the definition of the network
architecture which consists of C3K2 as feature
extraction block and SPFF (Spatial Pyramid Pooling
Fast) as multi-scale object detector followed by
C2PSA (Cross Stage Partial with Spatial Attention)
trying to pay more attention to the small or large
objects. YOLOv11 backbone is being initialized, and
pre-trained weights (if exist) can be loaded in to
accelerate the convergence. It is then fine-tuned on a
dataset for face and person detection. The split dataset
is then divided into training/validation for training.
AP is used for precise bounding box regression
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
688
(CIoU) and classification accuracy (binary
crossentropy). To facilitate the convergence of
training, a learning rate scheduling technique is
employed. The model trains over several epochs,
keeping track of its performance via validation loss
and accuracy. The model is trained and then evaluated
by calculating metrics such as MAP (Mean Average
Precision) to evaluate accuracy, IoU (Intersection
over Union) to measure the overlap of the predicted
bounding boxes and FPS (Frames Per Second) to
indicate if it is real-time or not. Additional metrics
like precision, recall, and F1-score are computed to
assess the model’s performance in terms of
accommodating for false positives versus false
negatives. The model runs on each frame, applies
non-maximum suppression (NMS) to remove
redundant detections and provides bounding boxes
around the detected faces and persons with
confidence scores. For processing pipeline using
OpenCV and PyTorch when the model is tuned and
gives good results on the evaluation dataset. so that
it could learn to detect faces and people in the given
datasets. For NMS, the model works on each frame
then all of them are passed through NMS which
keeps only the boxes around faces and persons that
we generated from our model. It depicts all class and
combinations over the analysis and precise
calculations (0.0 to 1.0) inside this range it draws
together the calculations over the analysis and
elements with an own output thing in it.
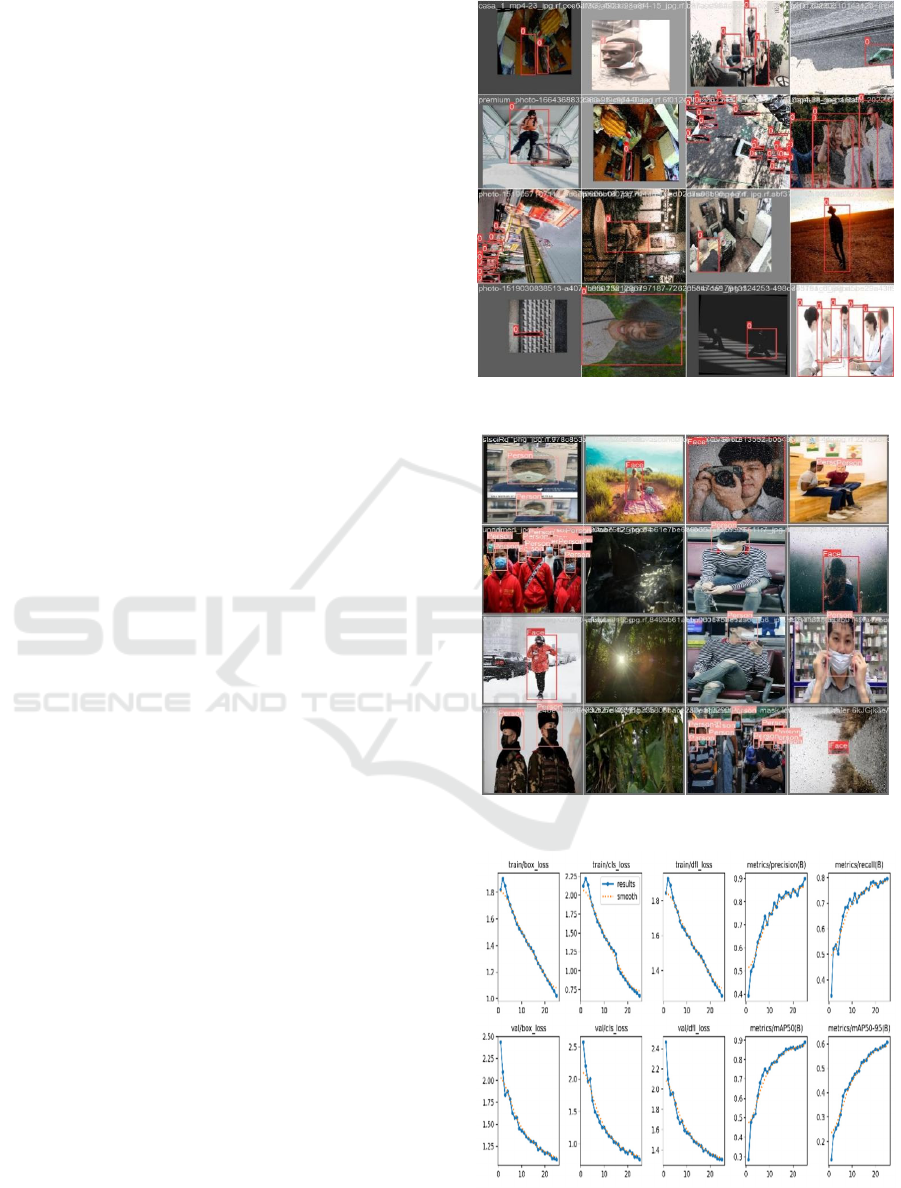
6 EXPERIMENTAL RESULTS
To assess the performance of YOLOv11 for face and
person detection, extensive experiments were
conducted using widely used benchmark datasets.
During training, the loss function (CIoU Loss)
consistently decreased over epochs, indicating that
the model was learning effectively. The validation
results showed a steady improvement in detection
accuracy, demonstrating that the newly introduced
C3K2 blocks, SPFF, and C2PSA mechanisms
contributed to better feature extraction and object
localization. Figure 5 shows the Person and face
detection. Figure 6 shows the Person and face
detection. Figure 7 shows the Precision graph
.
Table
1 shows the Accuracy and rate.
Figure 5: Person and Face Detection.
Figure 6: Person and Face Detection.
Figure 7: Precision Graph.
Intelligent Face and Person Classification Using Deep Learning Approach for Surveillance
689

Table 1: Accuracy and Rate.
YOLO
VERSIONS
MAP Precision Recal F1-Score
YOLOV5 0.91 0.85 0.78 0.82
YOLOV7 0.94 0.87 0.80 0.85
YOLOV8 0.97 0.90 0.82 0.85
YOLOV11 1.0 0.91 0.93 0.95
REFERENCES
He, K., Zhang, X., Ren, S., & Sun, J. (2016). Deep residual
learning for image recognition. IEEE Conference on
Computer Vision and Pattern Recognition (CVPR).
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., ... & Adam, H. (2017).
MobileNets: Efficient convolutional neural networks
for mobile vision applications. arXiv preprint
arXiv:1704.04861.
Ijiga, A. C., Igbede, M. A., Ukaegbu, C., Olatunde, T. I.,
Olajide, F. I. & Enyejo, L. A. (2024). Precision
healthcare analytics: Integrating ML for automated
image interpretation, disease detection, and prognosis
prediction. World Journal of Biology Pharmacy and
HealthSciences,2024https://wjbphs.com/sites/default/f
iles/WJBPHS-2024-0214.pdf
Ijiga, A. C., Abutu, E. P., Idoko, P. I., Agbo, D. O., Harry,
K. D., Ezebuka, C. I., & Umama, E. E. (2024). Ethical
considerations in implementing generative AI for
healthcare supply chain optimization: A cross-country
analysis across India, the United Kingdom, and the
United States of America. International Journal of
Biological and Pharmaceutical Sciences Archive, 2024,
07(01), 048063.https://ijbpsa.com/sites/default/files/IJ
BPSA-2024
Ijiga, A. C., Aboi, E. J., Idoko, P. I., Enyejo, L. A., &
Odeyemi, M. O. (2024). Collaborative innovations in
Artificial Intelligence (AI): Partnering with leading
U.S. tech firms to combat human trafficking. Global
Journal of Engineering and Technology Advances,
2024,18(03),106123.https://gjeta.com/sites/default/file
s/GJETA2024
Kang, K., Ouyang, W., Li, H., & Wang, X. (2018). Crowd
counting with deep structured scale integration
networks. IEEE Transactions on Pattern Analysis and
Machine Intelligence (TPAMI).
Lee, J., & Kim, S. (2023). A deep learning approach for IoT
security: An application of CNN and LSTM. Journal of
Information Security and Applications, 72, 103-112.
Levi, G., & Hassner, T. (2015). Age and gender
classification using convolutional neural networks.
IEEE Conference on Computer Vision and Pattern
Recognition Workshops (CVPRW).
Li, Y. & Zhao, Y. 2020, 'Application of CNN in IoT
Anomaly Detection', Journal of Network and Computer
Applications, vol. 148, p. 102435
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C. Y., & Berg, A. C. (2016). SSD: Single shot
multibox detector. European Conference on Computer
Vision (ECCV).
Parki, O. M., Vedaldi, A., & Zisserman, A. (2015). Deep
face. British Machine Vision Conference (BMVC).
Redmon, J., & Farhadi, A. (2018). YOLOv3: An
incremental improvement. arXiv preprintrXiv:1804.02
767.
Ribeiro, M., Ghosh, S., & dos Santos, E. (2019). Anomaly
detection in crowded scenes using deep learning. IEEE
Transactions on Circuits and Systems for Video
Technology (TCSVT).
Rodriguez, M., Laptev, I., Sivic, J., & Audibert, J. Y.
(2011). Density-aware person detection and tracking in
crowds. IEEE International Conference on Computer
Vision (ICCV).
Taigman, Y., Yang, M., Ranzato, M. A., & Wolf, L. (2014).
DeepFace: Closing the gap to human-level performance
in face verification. IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
Tuk, M., & Pentland, A. (1991). Eigenfaces for recognition.
Journal of Cognitive Neuroscience.
Xie, W., Noble, J. A., & Zisserman, A. (2018). Microscopy
cell counting with deep learning: CNNs versus
transformer-based architectures. International Journal
of Computer Vision.
Zhang, C., Li, H., Wang, X., & Yang, X. (2015). Cross-
scene crowd counting via deep convolutional neural
networks. IEEE Conference on Computer Vision and
Pattern Recognition (CVPR).
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
690
