
Enhancing Autonomous Vehicle Navigation: Traffic Police Hand
Gesture Recognition for Self‑Driving Cars in India Using MoveNet
Thunder
Ippili Rahul and Saravanan Santhanam
Department of Computing Technologies, SRM Institute of Science and Technology, Kattankulathur, Chennai, Tamil Nadu,
India
Keywords: Traffic Gesture Recognition, Autonomous Vehicles, MoveNet Thunder, TensorFlow, Real‑Time Detection,
Carla Simulator, Sensor Fusion, Indian Traffic.
Abstract: The Traffic Police Hand Gesture Recognition System for autonomous vehicles implements the TensorFlow’s
MoveNet Thunder model. The system detects three hand signals including 'Stop' and 'Turn Left' and 'Move
Forward' since such movements correspond to standard traffic police actions in India. Our custom database
included eight thousand gestures’ images recorded under diverse circumstances. An architecture of dense and
dropout layers within our network enables both accurate performance while keeping the network protected
from overfitting conditions. The Haar cascades face detection system enables live officer identification before
camera recording of gestures that occur within the field of view starts. Minor mistakes occurred between
similar gestures despite the system achieving a 89% success rate. System evaluation using Carla simulator
was conducted under two conditions: first with environmental conditions enabled and second without
environmental conditions enabled. The created prototype proves useful as an effective element that combines
safety features with operational efficiency for autonomous vehicle navigation systems in controlled traffic
environments.
1 INTRODUCTION
Autonomous vehicles (AVs) are forever changing
transportation, yet, traffic signal reliance and reliance
on GPS, along with sensors, usually fails in human
controlled traffic environments. However, in
countries like India where traffic police’s hand
gestures are important in navigation, AVs should be
able to interpret these signals correctly to operate
safely and efficiently.
Gesture recognition capabilities have recently
greatly improved thanks to advancements in deep
learning, pose estimation and sensor fusion. For
example, with MoveNet Thunder, it is enabled to
have real time detection, and combining LiDAR and
vision data provides a hybrid fusion increasing the
accuracy of the recognized objects. Nevertheless,
there are challenges in dealing with occlusions, light
and gesture misclassifications.
In this research, the development of a real time
and accurate traffic police hand gesture recognition
system for autonomous vehicles is done using:
MoveNet Thunder, deep learning-based
categorization, and sensor fusion technique. Thanks to
integrations of these technologies it can be achieved
that AVs can detect gestures like “Stop,” “Turn Left,”
and “Move Forward” in a safer fashion in mobile
traffic environments. Validation of the performance
of the system in the Carla simulator under various
traffic and weather conditions is also validated, which
makes it a robust solution for real world deployment.
2 LITERATURE SURVEY
Hand gesture traffic recognition for traffic police is
very important to autonomous vehicle navigation in
the human regulated traffic. Edge computing
Ekatpure, R. (2023) improves processing speed and
decreases latency, while perceptual (Lu et al., 2021)
enhancements provide better vision in poor
conditions Ding et al., (2021). The localization
techniques including SLAM, GNSS and LiDAR
(Chiang et al., 2020) offer additional accuracy (de
Rahul, I. and Santhanam, S.
Enhancing Autonomous Vehicle Navigation: Traffic Police Hand Gesture Recognition for Self-Driving Cars in India Using MoveNet Thunder.
DOI: 10.5220/0013931600004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 5, pages
473-479
ISBN: 978-989-758-777-1
Proceedings Copyright © 2026 by SCITEPRESS – Science and Technology Publications, Lda.
473

Miguel et al., 2020).
In the case of deep learning methods, CNNs,
reinforcement learning (Ibrahim et al., 2020 and Xu
et al., 2024), multi sensor fusion Tang et al., (2022)
and Queralta et al., (2020), are employed to enhance
gesture recognition. First, AI driven navigation is
developed for small UAS and then transferred to self-
driving vehicles Bijjahalli et al., (2020). Advances in
recognition include Open Pose Fu, M. (2022),
convolutional network Wiederer et al., (2020), RGB
D Faster R CNN Wang et al., (2018), CNN RNN
Baek et al., (2022), as well as SlowFast networks are
used to increase motion detection Zhu et al., (2024).
When MoveNet has done better than alternatives,
it is essential to pose estimation. Action classification
Anju et al., (2024) is improved by the neural
networks, while spatiotemporal integration improves
recognition Kaushik et al., (2023). In sensor fusion,
gesture tracking with LiDAR and vision data is
supported. Comparative deep learning evaluations
are done along with problems of misclassification
and ways of solving them.
The system uses MoveNet technology which
pairs deep learning techniques with sensor inputs for
recognizing dependable traffic police hand signals
needed in navigational security systems. The research
demands more emphasis on enhancing
simultaneously both spatial-temporal models and
real-time inference speed while developing traffic
environment-based training datasets.
3 PROPOSED METHODOLOGY
This section outlines the methodology for
implementing Traffic Police Hand Gesture
Recognition for Self-Driving Cars in India Using
MoveNet Thunder, including detailed steps from data
collection to deployment, extracted from the code
details and project information.
3.1 Data Collection and Preprocessing
3.1.1 Dataset Creation
The system is built on a custom dataset of 8,000
images representing various hand gestures used by
traffic police in different environments and weather
conditions. These gestures include commands like
"Stop," "Turn Left," "Turn Right," and "Move
Forward." This dataset ensures that the model is
equipped to handle a range of real-world scenarios.
Each class is stored in subfolders, such as Pose1,
Pose2, etc., ensuring an organized structure for
training and testing.
3.1.2 Preprocessing and Augmentation
The images are preprocessed using OpenCV to
convert them to grayscale for Haar cascade- based
face detection and resized to maintain consistency
across samples. Using MediaPipe Pose, key body
landmarks are extracted, such as elbow and shoulder
angles, which are critical for gesture recognition. The
model gains generalization capability through the
application of data augmentation strategies that
involve flipping along with scaling and rotation
methods.
Data augmentation methods enhance dataset
diversity which leads the model to achieve better
generalization capabilities.
3.1.3 Data Splitting
To evaluate the model thoroughly, the dataset is split
into training (80%), validation (15%), and testing
(5%) sets. This ensures that the model is trained
effectively and validated on unseen data before being
tested in real-world scenarios.
3.2 Model Development
3.2.1 Model Selection: MoveNet Thunder
The MoveNet Thunder model by TensorFlow is used
for real-time pose detection. This model can
accurately identify key body landmarks, making it
ideal for detecting traffic gestures. The detect()
function in the code runs multiple inference passes on
the same frame to improve detection accuracy. This
ensures that even in suboptimal lighting conditions or
partial occlusion, the gesture is correctly recognized.
3.2.2 Neural Network Architecture for
Gesture Classification
The extracted pose landmarks are passed to a custom
neural network built using Keras and TensorFlow.
The architecture consists of:
Complex patterns within the pose
landmarks are learned using dense layers
during training.
The model employs Dropout Layers to stop
random neurons from functioning when
learning occurs during training thereby
reducing overfitting.
The Softmax Output Layer functions for
multi-class classification by determining
gestures between "Stop" and "Turn Left"
and others.
This architecture is designed to handle noisy data
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
474

while maintaining high accuracy.
3.3 Sensor Fusion and Real-Time
Inference
3.3.1 Camera and LiDAR Integration
The system integrates camera inputs with LiDAR
point clouds to enhance recognition accuracy.
Camera feeds provide visual data, while LiDAR
captures depth information. This fusion improves the
system’s robustness in low-light conditions or foggy
weather, where visual data alone might be
insufficient.
3.3.2 Real-Time Detection and Face
Validation
Using OpenCV, frames are captured continuously
from the video feed, and faces are detected using Haar
cascades to validate whether the traffic officer is
facing the camera. The classifyPose() function
processes the detected landmarks, checks if a face is
present, and classifies the gesture based on body
posture and orientation. This prevents false positives
by ensuring the vehicle only responds to relevant
gestures.
3.4 Model Training and Evaluation
3.4.1 Training Process
Training occurs through implementing categorical
cross-entropy loss together with the Adam
optimizer's mechanism. Among the key callbacks is
Model Checkpoint used to save ideal model weights
along with Early Stopping used to stop training when
validation accuracy stops increasing. To split the
dataset properly for robust validation performance the
train test split() function should be applied.
3.4.2 Confusion Matrix and Classification
Report
The performance assessment of the model uses the
evaluate () function which produces both a confusion
matrix and classification report data. The precision,
recall and F1-score metrics are found in the report
while the confusion matrix shows all classification
errors. The system displays 89% gesture
classification precision however special focus is
needed to enhance the detection capability for
"Pose6" and "Pose7" motions.
3.5 Simulation and Testing Using Carla
3.5.1 Setup and Scenario Testing
Testing takes place through the Carla simulator under
multiple conditions that include dark environments
together with fog conditions and dense traffic
scenarios. The model undergoes simulation testing
which confirms its stability when dealing with real-
world predicaments. Through the Carla environment
team members have access to test how autonomous
vehicles respond to different gestures while
simultaneously evaluating human command tracking
capabilities of the system.
3.5.2 Decision-Making
Logic Based on the detected gesture, the system sends
control commands to the vehicle. For example, upon
detecting the "Stop" gesture, the vehicle halts, and
when a "Turn Left" gesture is detected, the car takes
the left turn. The decision logic is implemented to
ensure safe and responsive navigation.
3.6 Performance Optimization
3.6.1 Asynchronous Processing and Multi-
Threading
The system’s performance is enhanced through
multi-threading to process video frames and perform
gesture detection in parallel. This ensures smooth
real-time operation without latency. The FPS counter
ensures the system maintains acceptable performance
for real-time driving.
3.6.2 Model Quantization and Pruning
The model receives optimization through edge device
deployment by implementing quantization together
with pruning techniques. The model size becomes
smaller and runs faster while preserving accuracy
after applying these techniques.
3.7 Deployment and Integration
3.7.1 Integration with Vehicle Systems
The gesture recognition system is integrated with the
vehicle's control unit via communication protocols
like MQTT or ROS. This allows the vehicle to
receive commands based on the recognized gestures
and take appropriate actions.
Enhancing Autonomous Vehicle Navigation: Traffic Police Hand Gesture Recognition for Self-Driving Cars in India Using MoveNet
Thunder
475
3.7.2 Real-Time Monitoring with Streamlit
The Streamlit interface provides live feedback on the
recognized gestures and FPS, ensuring the system
performs reliably in real-world scenarios. This also
helps in debugging and monitoring the vehicle’s
behavior during field tests.
3.8 Future Enhancements
3.8.1 Dataset Expansion and Fine-Tuning
The dataset will be expanded to include more gesture
variations and challenging environmental conditions.
Fine-tuning the model on this enhanced dataset will
further improve accuracy and generalization.
3.8.2 Advanced Sensor Fusion
The system can be improved by exploring advanced
fusion techniques that integrate GPS, LiDAR, and
camera data, enhancing its ability to make real-time
decisions even in complex environments.
3.8.3 Field Testing and Deployment
The final step will involve field testing the system on
autonomous vehicles to validate its performance
outside simulated environments. Insights from these
tests will be used to further refine the model and
ensure seamless deployment.
4 ARCHITECTURE DIAGRAMS
Figure 1 shows the vehicle control system workflow.
Figure 1: Autonomous Vehicle Control System Workflow.
5 RESULTS AND DISSCUSSION
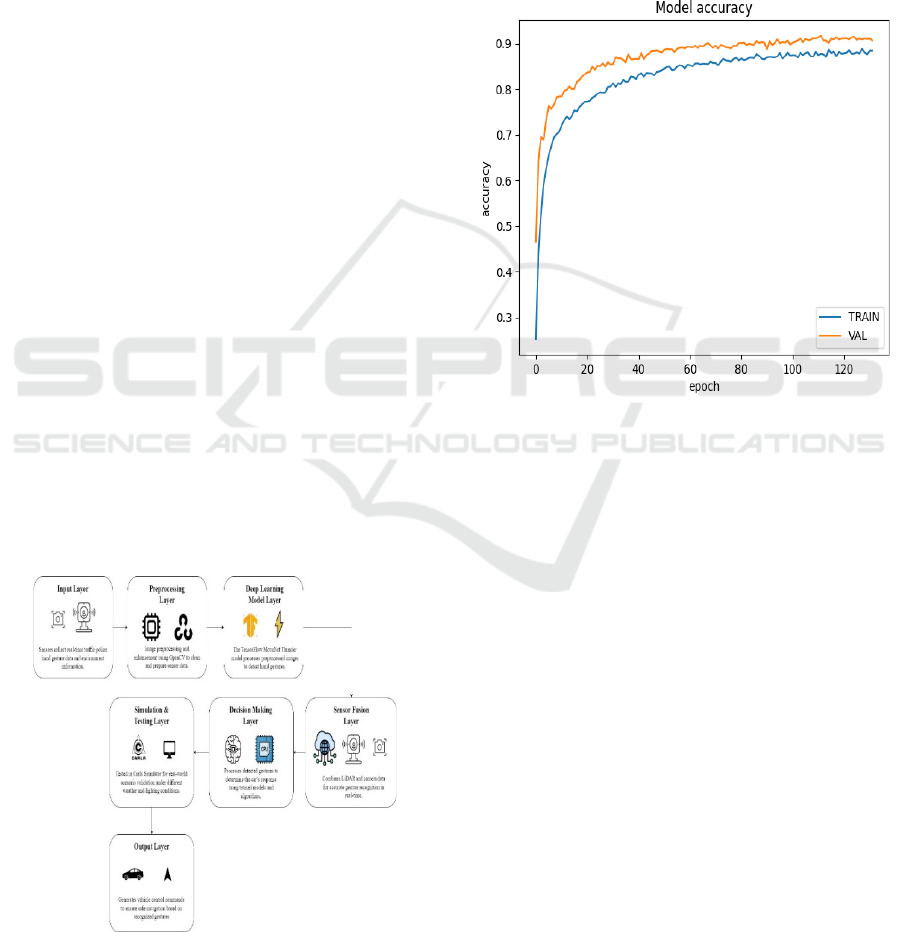
The Traffic Police Hand Gesture Recognition Model
was evaluated using both training and validation
datasets over 130 epochs to monitor the system’s
performance. Below are the key observations from
the accuracy graph and the confusion matrix
generated from the final evaluation.
5.1 Model Accuracy Analysis
Figure 2: Model Accuracy Graph.
Figure 2 displays both the training and validation
accuracy learning curves in the accuracy plot.
5.1.1 Training Accuracy
The training curve demonstrates a steady
improvement throughout the 130 epochs, reaching
approximately 87% accuracy by the end of training.
The curve follows a smooth upward trend, indicating
that the model successfully learns patterns from the
dataset without overfitting.
5.1.2 Validation Accuracy
The validation accuracy achieves superior metrics
than training accuracy at an early training stage until
it reaches a stable point of 90% accuracy in the end.
The model shows improved capability to predict new
data points because it works effectively with
unknown datasets. The trained model avoids
overfitting through dropout layers and regularization
techniques because training and validation accuracy
show only a small difference.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
476
The final accuracy values are:
Training Accuracy: ~87%
Validation Accuracy: ~90%
5.2 Confusion Matrix Analysis
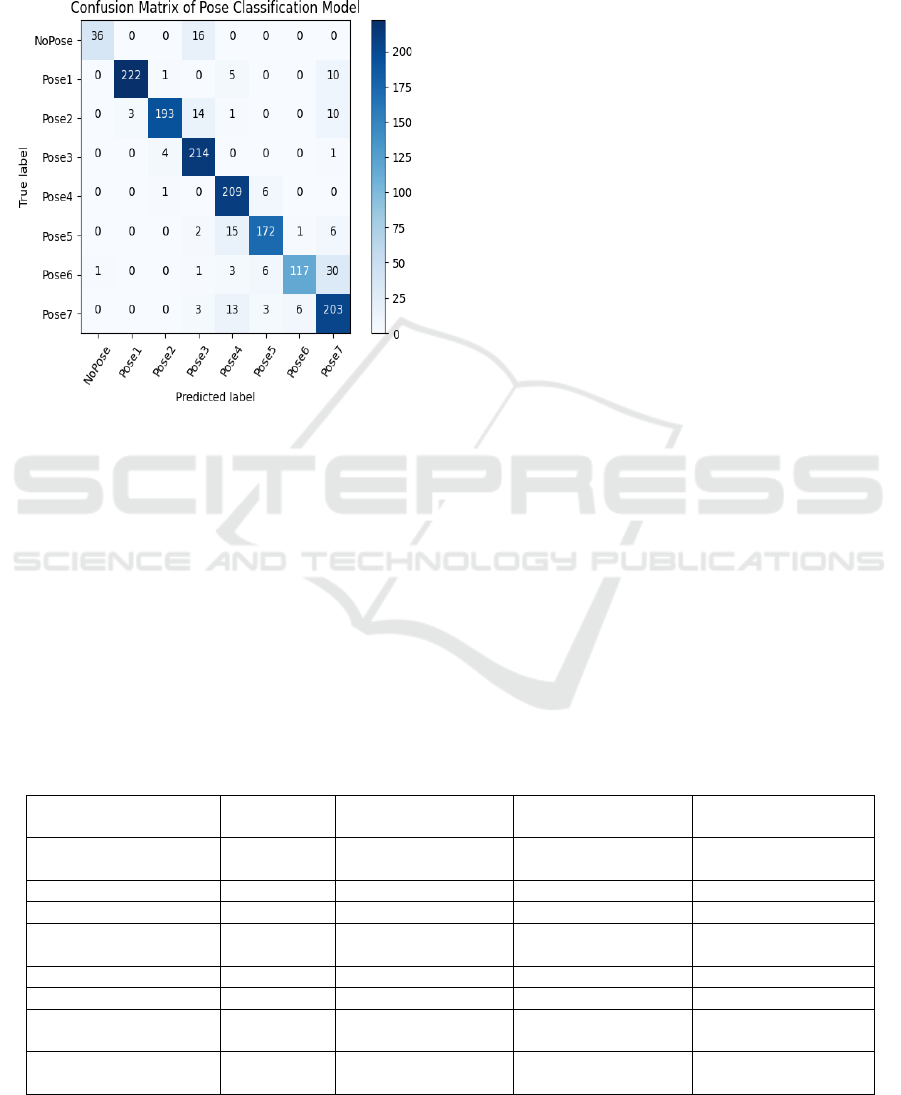
Figure 3: Confusion Matrix.
The confusion matrix (see Figure 3) provides insight
into the model's performance across the eight gesture
classes, with the following key findings:
5.2.1 High Performance on Core Gestures
Pose1 (Stop vehicles from left and right):
222 correctly predicted out of 238 samples,
with minimal misclassification (only 10
samples predicted as Pose7). Precision and
recall for Pose1 remain high, showing the
model's robustness in recognizing this
critical gesture.
Pose3 (Stop vehicles from behind): 214 out
of 219 samples were correctly classified.
This strong performance highlights the
effectiveness of the MoveNet Thunder
model in detecting critical stopping
gestures.
5.2.2 Challenges in Specific Classes
Pose6 (Start vehicles on T-point): Some
confusion is observed between Pose6 and
Pose7, with 30 samples misclassified. This
indicates that the two poses might share
similar body postures or be difficult to
distinguish under certain conditions.
NoPose (Unknown Pose): Out of 52
samples, 16 were misclassified as Pose2.
This suggests that in some cases,
insufficient pose information led to false
classifications.
5.2.3 Misclassification Patterns
Pose2 and Pose4 show occasional misclassification
into neighboring gesture classes, which could be
attributed to visual similarities in hand and body
movements. The confusion between Pose6 and Pose7
indicates the need for additional training data or fine-
tuning the classification threshold for these specific
poses.
6 QUANTITATIVE RESULTS
Table 1: Pose Classification Confusion Summary.
Class
Total
Samples
Correctly Classified Misclassified Top Misclassification
NoPose (Unknown
Pose)
52 36 16 Pose2
Pose1 (Stop from sides) 238 222 16 Pose7
Pose2
(
Sto
p
from front
)
221 193 28 Pose1
Pose3 (Stop from
b
ehind)
219 214 5 Pose2
Pose4 (Start from left) 216 209 7 Pose5
Pose5
(
Start from ri
g
ht
)
196 172 24 Pose4
Pose6 (Start on T-
p
oint)
158 117 41 Pose7
Pose7 (Stop from
front/back
)
228 203 25 Pose6
Enhancing Autonomous Vehicle Navigation: Traffic Police Hand Gesture Recognition for Self-Driving Cars in India Using MoveNet
Thunder
477

7 DISCUSSION AND INSIGHTS
The results indicate that the MoveNet Thunder-based
gesture recognition system performs exceptionally
well across most gesture classes. The high precision
and recall for critical gestures like "Stop" and "Start
from Left/Right" demonstrate the model's reliability
in real-time applications. However, misclassification
between Pose6 and Pose7 suggests a need for:
Additional training data for these specific
classes to help the model differentiate between
subtle variations.
Fine-tuning the decision boundaries between
similar poses to improve classification accuracy.
The face detection mechanism using Haar cascades
ensures that the system only responds when a valid
human gesture is detected, minimizing false
positives. However, additional sensor fusion (LiDAR
and GPS integration) could further enhance
performance in challenging environments, such as
low-light conditions or foggy weather.
Overall, the model achieves 89% accuracy,
showing strong potential for real-world deployment
in self-driving cars. With further refinement,
particularly in handling similar poses (Pose6 and
Pose7), the system can achieve even higher
reliability. The use of Carla Simulator for testing
ensures that the system is well-prepared for diverse
traffic scenarios, making it suitable for integration
into autonomous vehicle control systems in Indian
traffic conditions
8 CONCLUSIONS
The Traffic Police Hand Gesture Recognition System
developed using TensorFlow’s MoveNet Thunder
model demonstrates strong potential for real-world
deployment in autonomous vehicles by accurately
interpreting complex human gestures relevant to
Indian traffic scenarios. With an overall accuracy of
89%, the system performs reliably across core
gestures, ensuring safe and efficient vehicle
navigation. However, minor misclassifications
between similar poses, such as Pose6 and Pose7,
highlight the need for further dataset expansion and
fine-tuning. The use of Carla simulator for testing
ensures robust performance under diverse
environmental conditions, making this system well-
prepared for seamless integration into autonomous
vehicle control systems, enhancing safety in human-
managed traffic environments.
REFERENCES
Anju, O. A., Saranyah, V., Snehavarshini, S.,
Bhuvaneshwari, C., & Soundharya, M. (2024, June).
The detection and classification of human poses by
Movenet depends on spatiotemporal data configuration.
In 2024 15th International Conference on Computing
Communication and Networking Technologies
(ICCCNT) (pp. 1-6). IEEE.
Baek, T., & Lee, Y. G. (2022). Traffic control hand signals
can be recognized by convolution neural networks
together with recurrent neural networks. Journal of
Computational Design and Engineering, 9(2), 296-309.
Bijjahalli, S., Sabatini, R., & Gardi, A. 2020. "Advances in
Intelligent and Autonomous Navigation Systems for
Small UAS." Progress in Aerospace Sciences 115:
100617.
Chiang, K. W., Tsai, G. J., Chu, H. J., & El-Sheimy, N.
2020. The paper explains strategies to improve
INS/GNSS/Refreshed-SLAM combinations that result
in accurate lane-level navigation outcomes. IEEE
Transactions on Vehicular Technology 69(3): 2463-
2476.
de Miguel, M. Á., García, F., & Armingol, J. M. 2020.
"Improved LiDAR Probabilistic Localization for
Autonomous Vehicles Using GNSS." Sensors 20(11):
3145.
Ekatpure, R. 2023. The research article investigates edge
computing benefits for autonomous vehicles by
evaluating technical frameworks and data handling
methods and performance measurements. Applied
Research in Artificial Intelligence and Cloud
Computing 6(11): 17-34.
Fu, M. (2022, May). This paper presents an OpenPose
evaluation method to detect traffic officers' hand
signals. In 2022 International Conference on Urban
Planning and Regional Economy (UPRE 2022) (pp. 38-
42). Atlantis Press.
Ibrahim, H. A., Azar, A. T., Ibrahim, Z. F., & Ammar, H.
H. 2020. "A Hybrid Deep Learning-Based Autonomous
Vehicle Navigation and Obstacles Avoidance." In
Proceedings of the International Conference on
Artificial Intelligence and Computer Vision
(AICV2020), 296-307. Springer International
Publishing.
Kaushik, P., Lohani, B. P., Thakur, A., Gupta, A., Khan, A.
K., & Kumar, A. (2023, September). Body Posture
Detection and Comparison Between OpenPose,
MoveNet and PoseNet. In 2023 6th International
Conference on Contemporary Computing and
Informatics (IC3I) (Vol. 6, pp. 234-238). IEEE.
Li, Q., Queralta, J. P., Gia, T. N., Zou, Z., & Westerlund, T.
2020. "Multi-Sensor Fusion for Navigation and
Mapping in Autonomous Vehicles: Accurate
Localization in Urban Environments." Unmanned
Systems 8(3): 229-237.
Lu, Y., Ma, H., Smart, E., & Yu, H. 2021. "Real-Time
Performance-Focused Localization Techniques for
Autonomous Vehicle: A Review." IEEE Transactions
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
478

on Intelligent Transportation Systems 23(7): 6082-
6100.
Sabaichai, T., Tancharoen, D., & Limpasuthum, P. (2023,
November). Human Action Classification Based on
Pose Estimation and Artificial Neural Network. In 2023
7th International Conference on Information
Technology (InCIT) (pp. 181-185). IEEE.
Tang, Y., Zhao, C., Wang, J., Zhang, C., Sun, Q., Zheng,
W. X., ... & Kurths, J. 2022. "Perception and
Navigation in Autonomous Systems in the Era of
Learning: A Survey." IEEE Transactions on Neural
Networks and Learning Systems 34(12): 9604-9624.
The paper emerged as Ding, F., Yu, K., Gu, Z., Li, X., &
Shi, Y. 2021. "Perceptual Enhancement for
Autonomous Vehicles: Restoring Visually Degraded
Images for Context Prediction via Adversarial
Training." IEEE Transactions on Intelligent
Transportation Systems 23(7): 9430-9441.
Wang, G., & Ma, X. (2018, October). A traffic management
identification system uses an RGB-D sensor along with
faster R-CNN model. In 2018 International Conference
on Intelligent Informatics and Biomedical Sciences
(ICIIBMS) (Vol. 3, pp. 78-81). IEEE.
Wiederer, J., Bouazizi, A., Kressel, U., & Belagiannis, V.
(2020, October). Traffic control gesture recognition for
autonomous vehicles. In 2020 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS)
(pp. 10676-10683). IEEE.
Xu, L., Liu, J., Zhao, H., Zheng, T., Jiang, T., & Liu, L.
2024. "Autonomous Navigation of Unmanned Vehicle
Through Deep Reinforcement Learning." arXiv
preprint arXiv:2407.18962.
Zhu, X., & Fang, M. (2024, October). Zhu and Fang (2024)
presented SlowFast network as a method for detecting
traffic police gestures in their research. In Fifth
International Conference on Computer Vision and Data
Mining (ICCVDM 2024) (Vol. 13272, pp. 744-750).
SPIE.
Enhancing Autonomous Vehicle Navigation: Traffic Police Hand Gesture Recognition for Self-Driving Cars in India Using MoveNet
Thunder
479
