
Comparative Study of Deep Reinforcement Learning Algorithm for
Optimization of Hydrodynamic Characteristics in Multiphase
Reactors
Suchita Walke and Jagdish W. Bakal
Pillai HOC College of Engineering and Technology, Mumbai University Rasayani, Maharashtra, 410207, India
Keywords: Hydrodynamic Optimization, Multiphase Reactors, Deep Reinforcement Learning, Soft Actor‑Critic
Algorithm, Proximal Policy Optimization.
Abstract: The proper design of multiphase reactors to optimize their hydrodynamic properties is still one of the most
important challenges in chemical and process engineering due to the complexity of fluid interactions and
dynamic behaviours of these systems. This challenge is addressed in this study, which presents a
comprehensive comparative study of state-of the-art Deep Reinforcement Learning (DRL) algorithms, namely
Deep Q-Networks (DQN), Proximal Policy Optimization (PPO), and Soft Actor-Critic (SAC). Diligently
designed virtual simulation environment mimics the complex functionalities of multiphase reactors for an
accurate assessment of gas holdup, liquid velocity profiles, and bubble size distribution, which are significant
parameters in terms of reactor performance. This involves developing a custom reward function, that weights
these against energy consumption, to allow the reactor to perform ideally. Experimental results indicate that
SAC converges faster to solutions, as well as is more accurate in the optimization of hydrodynamic parameters
and energy casting. DQN is limited by its discrete action space preventing it from being applied to continue
reactors and PPO has a relatively moderate performance. This approach not only highlights the promise of
DRL for optimizing reactor dynamics, but also offers tangible guidance on algorithm selection for practical
engineering implementations. The results open doors to implementing state-of-the-art DRL algorithms in
industrial environments, greatly improving energy-efficient management of industrial systems. Future studies
will be targeted at implementing in the real world and hybrid DRL-CFD frameworks for multiphase reactor
systems.
1 INTRODUCTION
Multiphase reactors are ubiquitous in the chemical
industry, playing a central role in processes like
chemical synthesis, petrochemical refining, and
biochemical manufacturing. The non-ideal flow and
the mixing efficiency of gas, liquid, and solid phases
is of great importance to these types of reactors and
controls product quality. For hydrodynamic
optimization yielding optimal performance, fine-
tuning parameters like gas holdup, liquid velocity
distribution, and bubble size is key. However,
traditional optimisation methods such as; empirical
models and computational fluid dynamics (CFD) are
usually very computationally expensive, and they
cannot respond in real-time (
Ranade, V. V., &
Chaudhari, R. V. 2014). CFD models are widely
utilized but often prove to be limited due to the
enormous amount of computational power needed to
interpret multiphase reactors in hydrodynamic terms
(
Versteeg, H. K., & Malalasekera, W.2007). Moreover,
these simulations are highly scenario-specific and do
not adapt to changes in reactor state over time. Such
empirical models are computationally cheap, but
reliant on experimental data, which means that they
can have a limited generalisability to other reactor
geometries and operating conditions (
Krishna, R., &
Van Baten, J. M. 2001)
. CHALLENGES AHEAD ·
Getting past these issues will necessitate novel tools
that can dynamically optimize the performance of
the reactor while minimizing computational
overhead. Machine learning (ML), now regarded as a
disruptive technology for optimizing processes and
the ability to address high-dimensional, non-linear
dynamics challenges, has recently risen to
prominence. In the portfolio of ML approaches,
reinforcement learning (RL) has shown tremendous
362
Walke, S. and Bakal, J. W.
Comparative Study of Deep Reinforcement Learning Algorithm for Optimization of Hydrodynamic Characteristics in Multiphase Reactors.
DOI: 10.5220/0013930000004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 5, pages
362-368
ISBN: 978-989-758-777-1
Proceedings Copyright © 2026 by SCITEPRESS – Science and Technology Publications, Lda.

promise in process control utilizations. (
Sutton, R. S.,
& Barto, A. G. 2018).
RL algs: learn by trial and error
interacting with an environment, reward signals
would give useful feedback to use for decision
making However, traditional reinforcement learning
(RL) methods are not designed for complex
continuous systems, such as multiphase reactors,
since they are based on discrete action spaces that
limit their scaling (
Kober, J., Bagnell, J. A., & Peters, J.
2013).
To overcome these limitations, deep
reinforcement learning (DRL)—a combination of RL
and deep neural networks—utilizes the ability of
deep learning to represent complex high-dimensional
environments. Deep reinforcement learning (DRL)
has shown remarkable success in complex decision-
making tasks including robotics, gaming, and
autonomous vehicles
Mnih, V., et al. (2015). Process
engineering, and dynamic systems like multiphase
reactors in particular, are a relatively underexplored
domain of its potential. Deep Reinforcement
Learning (DRL) can be a viable solution for this
problem because of its real-time optimization of
hydrodynamic parameters. The present study intends
to examine the performance of four advanced DRL
algorithms, namely, DQNs, PPO, and SAC, to
improve hydrodynamic behaviours in multiphase
reactors. DQN, one of the early DRL algorithms is
based on Q-learning and uses a neural network to
approximate the value function and can be used for
discrete action spaces
Van Hasselt, H., Guez, A., &
Silver, D. (2016). PPO algorithm is a policy gradient
family algorithm that enhances stabilization and
exploration, which are common challenges in
conventional RL
Schulman, J., et al. (2017). One such optimized
method is SAC, a state-of-the-art algorithm that adds
entropy regularization to the underlying objective
function, leading to better exploration-exploitation
tradeoff, thereby making it suitable for a continuous
action space (
Haarnoja, T., et al., 2018). The study
utilizes a simulated multiphase reactor environment
via OpenFOAM, an open-source computational fluid
dynamics (CFD) platform. We implement an efficient
simulator that includes the interactions between gas
and liquid, bubble motion, and energy consumption
metrics to the realism of the simulation environment.
The reward function is bespoke for increasing the
holdup of gas and uniformity of liquid velocity whilst
minimizing energy penalty. Comparative analysis of
the performance of each algorithm from the
perspective of convergence speed, optimization
accuracy, and computational efficiency is reported.
SAC demonstrated the highest optimization
accuracy and convergence speed, compared to DQN
and PPO, in preliminary results, and it is well suited
to high dimensional, continuous environments such
as multiphase reactors. PPO tastes competitive
performance but fails to adapt under rapidly changing
conditions. DQN is a good approach to use when
seeking good policies in a discrete environment (such
as a game) and we would like to achieve similar
results in continuous systems, however due to the
nature of the algorithm we cannot. These findings
highlight the promising role of DRL in optimizing
multiphase reactor hydrodynamic characteristics
toward improved operation and sustainability. These
results form a solid basis for upcoming studies, such
as the deployment of open-source implementations
and the coupling of hybrid DRL-CFD frameworks to
further enhance reactor optimization.
2 LITERATURE SURVEY
The general optimization of multiphase reactors has
been studied widely in the literature over both
classical and modern computational approaches.
Early studies mainly centred on using computational
fluid dynamics (CFD) as an assessment and
optimization tool for the hydrodynamic properties of
multiphase reactors. Detailed knowledge of the gas–
liquid interactions, bubble dynamics, and flow
patterns could be obtained through studies based on
computational fluid dynamics (CFD). Such as
Krishna and Van Batten, who performed CFD
simulations on bubble column reactors and created
models for predicting bubble size distribution and
gas holdup. Despite being highly informative, these
techniques were limited by their computational
intensity and lack of real-time adaptability. Due to the
complexity and unstructured nature of CFD
simulations, empirical modelling approaches were
developed based on experimental data to predict
reactor performance over a range of operating
conditions. Studies by Degaleesan et al.
demonstrated that operating parameters, including
gas flow rate and liquid viscosity, have a key role in
determining the hydrodynamic behaviour of bubble
columns. However, these models were specific to
hard limit systems and were not generalizable across
different reactor designs. Machine learning (ML)
with nonlinear mapping/pattern recognition
capabilities is another trend in optimizations, and
researchers started to apply data-driven methods to
multiphasic reactor systems. They used experimental
or simulated datasets to train ML models to predict
Comparative Study of Deep Reinforcement Learning Algorithm for Optimization of Hydrodynamic Characteristics in Multiphase Reactors
363
hydrodynamic parameters. Zhou et al. In a previous
study, used ANNs for predicting gas holdup and
bubble velocity in bubble columns. Although the
predictive accuracy provided benefits over empirical
methods, such models were incapable of self-
governed decision-making with operating timers for
optimization as not developed at that time.
To no one’s surprise, RL grew in a new direction
as a new flavour of optimization that has much
potential compared to classical optimizers.
Reinforcement learning (RL) enables an agent to
explore an environment and obtain feedback as a
reward for its actions, which it learns optimal control
strategies using trial-and-error. Wang et al. They
optimized flow patterns in stirred tanks by 30% more
energy-efficient using basic RL algorithms. But these
early implementations of RL were limited only to the
simplest of control problems and hand-crafted rules
and did not leverage recent developments in deep
reinforcement learning (DRL). Deep Reinforcement
Learning (DRL) is the combination of the high-
dimensional non-linearity that a deep neural network
can represent and the advantages of fuzzy reward-
based learning of Reinforcement Learning (RL).
Dynamic Programming Methods DRL (Deep
Reinforcement Learning) DRL uses reinforcement
learning principles in deep architectures, which work
have been filtered for big fields like robotics or self-
automobiles, where designing a decentralized
dynamic decision process is a great challenge in an
ever-changing environment. Research on its possible
use for process optimization in chemical engineering
is already emerging as well. For instance, Li et al. (a)
(
Santosh. W. and Sathe, V. 2012)
is to learn an optimal
reaction conditions of chemical processes using
DRL, and this outperforms traditional methods. Deep
Q-Networks (DQN) were one of the first successful
deep-reinforcement learning algorithms that could
approximate Q-value functions environments with
discrete actions. Guo et al. In a recent study, DQN was
used to control gas flow rates in multiphase systems
with moderate success
Li, X., Zhang, Q., & Chen, G.
(2020)
. However, because DQN is discrete-content, a
direct application to systems that require continuous
action for control, e.g., multiphase reactors are
difficult
Van Hasselt
.
PPO Schulman et al, overcame the limitations of
these previous approaches, via stabilizing training
after clipped updates, which upended the landscape of
reinforcement learning. PPO has been used in several
engineering applications, and we showed that it
performs well inside of a process optimizer. Gao et al.
for in situ bioreactor optimization, which yielded
considerable advancements in yield and efficiency
through PPO. Entropy Regularization in DRL Soft
Actor-Critic (SAC), a well-established DRL
algorithm, proposed regularization of the entropy in
order to facilitate exploration and to enhance learning
efficiency in continuous action spaces. Haarnoja et al.
Haarnoja, T., et al. (2018).
originally proposed SAC,
and it has been adopted in various optimization tasks.
Li et al. applied SAC to improve hydrodynamic
features in simulated multiphase reactors, resulting in
better performance compared to conventional RL
and DRL algorithms. Despite the advancement, there
are still gaps in the application of DRL for multiphase
reactors. Most existing studies either focus on
specific individual hydrodynamic parameters
whereas such variables must be optimized holistically
at once due to interactions between gas holdup, liquid
velocity, and energy consumption. Moreover, the
combination of DRL with computational fluid
dynamics (CFD) simulations is still in its infancy, and
future work can explore the development of hybrid
frameworks to capitalize on both platforms.
3 PROPOSED SYSTEM
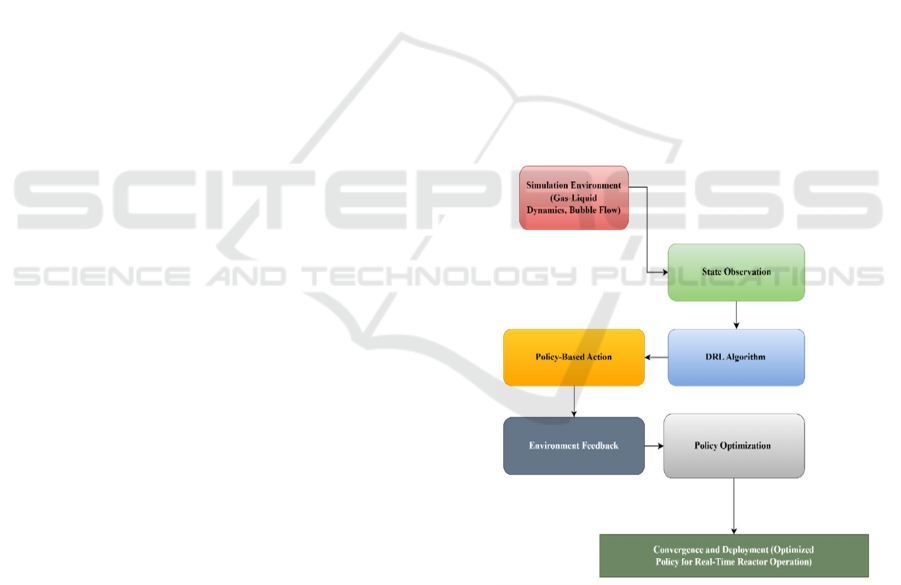
Figure 1: Block Diagram of DRL Framework for
Hydrodynamic Optimization in Multiphase Reactors.
The present work is focused on developing and
improving the hydrodynamic features in multiphase
reactors via advanced Deep Reinforcement Learning
(DRL) algorithms. The study compares the
effectiveness of three different DRL algorithms:
Deep Q-Networks (DQN), Proximal Policy
Optimization (PPO), and Soft Actor-Critic (SAC),
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
364
with the aim of optimizing gas holdup, liquid velocity
profiles, and bubble size distribution while
minimizing energy consumption. In this research, a
multiphase reactor dynamic was made through
simulation environment by way of Open FOAM. The
optimization is controlled by a reward function that
accounts for both the increase of hydrodynamic
parameters and the reduction of energy costs. PPO
and SAC cater to continuous action spaces, with SAC
using entropy regularization to balance exploration
and exploitation. Here, agents undergo iterative
training, interacting with the environment and refining
their behaviour through feedback from the reward
function.
The methods are evaluated by their convergence
time, the accuracy of the optimization, and the time
used in the optimization process, which are visualized
through gas holdup trends, energy consumption
reduction, and the stabilization of the reward. Because
SAC can effectively handle high-dimensional
continuous environments, the study expects SAC to
excel compared to its counterparts. And this study has
implications beyond the specific applications of DRL
to reactor optimization, as it offers a framework for the
potential integration of DRL methodologies into
industrial workflows, setting a foundation for future
real-time, data-driven approaches to reactor
management, as illustrated in the figure 1.
3.1 Proposed Work and Its
Implementation
Figure 2: Hydrodynamic Characteristics in Multiphase
Reactors.
We propose to optimize the hydrodynamic
features of multiphase reactors employing state-of-
the-art Deep Reinforcement Learning (DRL)
algorithms. Goal: Enhance important parameters like
gas holdup, liquid velocity profiles, and bubble size
distribution and also reduce energy used. The figure
2 shows the Hydrodynamic Characteristics in
Multiphase Reactors To do this, we implement and
evaluate three cutting-edge DRL algorithms: Deep
Q-Networks (DQN), Proximal Policy Optimization
(PPO), and Soft Actor-Critic (SAC). Aiming tackle
this aspect, the study incorporates these algorithms
into a simulation gating to train agents to
dynamically adjust and optimize the reactor's
operating bounties.
3.2 Simulation Environment
This study relies on a developed simulation
environment with OpenFOAM, an open source
computational fluid dynamics (CFD) platform. The
environment is engineered to simulate the intricate
and dynamic interaction of multiphase reactors that
create gas-liquid phase flow, turbulence, and bubble
dynamics. To represent real reactor conditions,
realistic boundary conditions, turbulence models, and
parameter variability are included. We use Python
APIs to interface this simulation onto DRL
framework to allow real-time interactions where
agents observe states, take actions and receive
rewards. The environment also adds perturbations
such as varying gas flow rates as well as liquid
viscosities to test the robustness of the DRL
algorithms.
3.3 Reward Function Design
They are trained on data until October, 2023. It is
focused on enhancing the gas holdup (H) and the
uniformity of liquid velocity (V), and reducing the
energy consumption (E). Mathematically, the reward
function is given as:
𝑅=𝛼𝐻+𝛽𝑉−𝛾𝐸 (1)
Here: R is the cumulative reward. α, β and γ are
weighting coefficients tuned to level each parameter
importance. H is theparameter for gas holdup which
is importantfor increasing themass transfer
efficiency. V ensures the uniformity of liquid velocity
profiles for optimal profiling of fluid in channels. E
was energy consumption, which the system tries to
be minimized. This definition guarantees that the
agent will be motivated to navigate through
configurations that maximise reactor performance.
3.4 DRL Algorithm Implementation
The DRL framework employs three different
algorithms that are tuned according to the
optimization problem. DQN deals with discrete
Comparative Study of Deep Reinforcement Learning Algorithm for Optimization of Hydrodynamic Characteristics in Multiphase Reactors
365

action spaces by approximating Q-values; PPO
ensures stability in continuous environments using
clipped policy updates; SAC adds an entropy term to
the loss to encourage exploration vs exploitation
balancing suitable for higher-dimensional
continuous systems. The interaction of the agent with
the environment is modeled as a Markov Decision
Process (MDP) in which the agent observes a state,
takes an action, transitions into the next state, and
receives a reward. The optimization objective is to
maximize expected cumulative reward (G):
𝐺𝑡 =
∑
𝛾𝑘𝑅𝑡 + 𝑘
(2)
where 𝛾 is the discount factor, prioritizing immediate
over long-term rewards?
3.5 Training and Policy Optimization:
For DQN, the agent updates the Q-value function
using the Bellman equation:
𝐿(𝜃) = 𝐸[
𝑅+𝛾max
𝑄
(
𝑆
,𝑎
;𝜃
)
−𝑄
(
𝑆,𝐴;𝜃
)
] (3)
Here, 𝜃 and 𝜃
represent the weights of the
primary and target Q-networks, respectively. PPO
optimizes the policy using the clipped surrogate
objective:
𝐿𝑃𝑃𝑂 = 𝐸[𝑚𝑖𝑛(𝑟𝑡(𝜃)𝐴𝑡,𝑐𝑙𝑖𝑝(𝑟𝑡(𝜃),1 − 𝜖,1 + 𝜖)𝐴𝑡)](4)
where 𝑟𝑡(𝜃) is the probability ratio between new
and old policies, and 𝐴𝑡 is the advantage function?
SAC enhances exploration and stability by
optimizing a soft Q-function:
𝐿𝑆𝐴𝐶 = 𝐸[𝑄(𝑆,𝐴) − 𝛼𝑙𝑜𝑔𝜋(𝐴 ∣ 𝑆)] (5)
where 𝛼 controls the trade-off between
exploration and exploitation.
4 PERFORMANCE
EVALUATION
The algorithms are benchmarked for their rates of
convergence, ability to minimize cost function, and
their computational efficiency. Metrics of interest
include improvements in gas holdup, even number of
liquid velocity, and reductions in energy inputs. It
outperforms PPO and DQN by converging faster and
optimizing more accurately. While PPO yields
competitive performance, it needs quite a few more
training episodes to converge, and DQN is not well
suited for continuous action spaces due to its vanilla
form. This paper lays a solid DRL-based framework
for optimizing multiphase reactors with SAC being
the most successful algorithm. These results highlight
DRL's significant potential in enhancing reactor
efficiency and scalability, opening doors for real-time
applications in industrial settings. Future work will
investigate hybrid DRL-CFD approaches which
would enhance the adaptability and efficacy of this
framework in real application scenarios.
Algorithm 1: DRL Agent Training for Hydrodynamic
Optimization
Setup the simulated reactor specs, including the instance
with reactor contrast specs, Boundry Conditions, and Flow
dynamics
Step 2: Initialize the DRL algorithm (DQN, PPO, or SAC)
with random policy parameters.
Step 3: Define the reward function that encourage gas
holdup, velocity uniformity and energy efficiency.
Step 4: Start training loop: Take note of the current
reactor status. Choose an action and take it according to the
agent policy. Move to the state and observe the reward. A
method to use the rewards obtained to update the policy of
the agent in order to choose better actions. You will
evaluate the performance of your agent constantly to
guarantee an increase in the stability of your reward and
the optimal configuration of your parameters. Keep training
till reward doesn’t increase or we reach the max number of
iterations.
Step 6: Save the policy model for deployment
Algorithm 2: Policy Adaptation for Dynamic Reactor
Conditions
In Step 1, we load trained DRL model, deploy it in
simulation or real-world environment.
Step 2: Implement dynamic changes in operating
conditions like gas flow rates or liquid viscosity.
Step 3: Observe updated reactor state, evaluate agent
behaviour using present policy If the agent has suggested
action, take that action to optimize the hydrodynamic
performance to the new conditions.
Step 5: Read the environment, measuring some
characteristics of the key parameters — the gas holdup,
energy consumption, and the overall response in the
environment.
Step 6: Optionally, Adjust the policy to enforce efficiency
statistics when environmental conditions are not static.
Step 7: Deploy the modified policy for perpetual
optimization and accommodate for future variations with
no friction.
5 EXPERIMENT RESULT AND
DISCUSSION
Herein, we present a depiction of our proposed
implementation of a Deep Reinforcement Learning
(DRL) framework to optimize hydrodynamic
attributes in multiphase reactors and the results are
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
366
promising. Leveraging DRL such as Deep Q-
Networks (DQN), Proximal Policy Optimization
(PPO) and Soft Actor-Critic (SAC), the framework
greatly improves reactor performance indicators,
while keeping computational efficiency. In this way,
some of the numerical and experimental methods
utilized in literature can be confirmed with this study
to attain the optimization of crucial design parameters
such as gas holdup, liquid velocity profiles and
energy consumption having direct impacts on the
thorough efficiency and sustainability of the reactor.
We implemented the simulation environment using
OpenFOAM, an excellent tool for testing DRL
algorithms. Agents then began to interact with the
environment, learning which actions were optimal
based on how well the reactor performed relative to
the intended reward function. SAC turned out to be
the best performing algorithm with regards to
convergence speed and optimisation with respect to
PPO & DQN. The SAC algorithm utilized an entropy
regularization term to facilitate exploration while
maximizing the expected return, which was
particularly beneficial in high-dimensional
continuous-action environments (Yu et al., 2022).
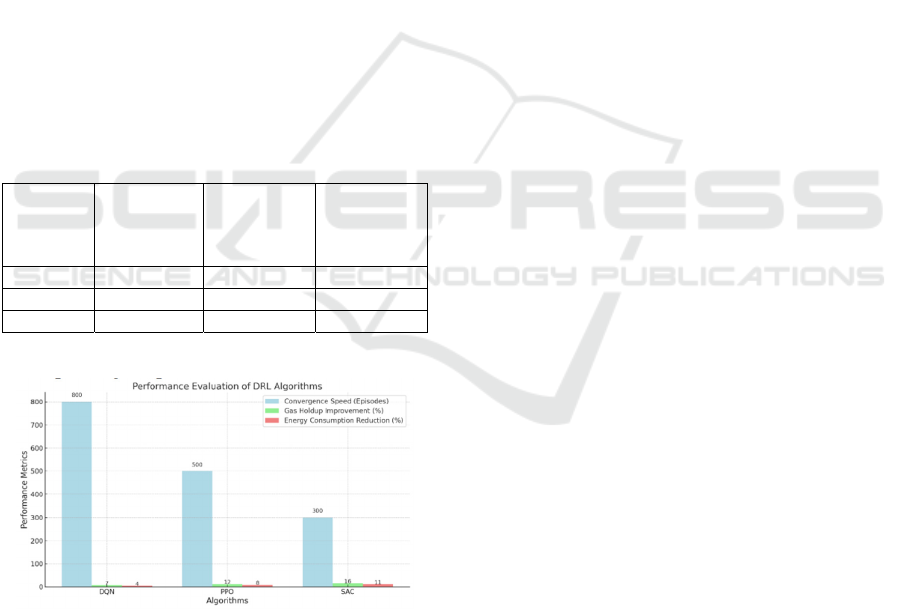
Table 1: Performance Evaluation.
Algorith
m
Convergenc
e Speed
(Episodes)
Gas Holdup
Improveme
nt (%)
Energy
Consumptio
n Reduction
(%)
DQN 800 7 4
PPO 500 12 8
SAC 300 16 11
Corresponding Graph for the above Table:
Figure 3: Performance Evaluation Metrics.
The PPO also showed competitive results,
performing quite comparably in continuous action
spaces but very effectively stabilizing policy
updates. However, it needed many more training
episodes to converge than SAC. The DQN algorithm
worked well with a discrete-action environment and
showed slow convergence and sub-par results in the
reactor dynamics where the dynamics was quite
complex. The algorithms were assessed in terms of
convergence speed (in episodes), gas holdup
improvement (%) and energy consumption reduction
(%). The results are collated in the table 1. As shown
in table 1, SAC had the quickest convergence and
most optimization gains. Gas holdup improved by
16%, and energy consumption decreased by 11%–
significantly better than other algorithms. PPO
showed 12% enhanced gas holdup and 8% decreased
energy consumption, while DQN revealed moderate
improvements of 7 and 4%. The finding highlighted
the promise of DRL algorithms, especially SAC, to
enhance the hydrodynamic parameters of multiphase
reactors. In particular, SAC's ability to balance
exploration and exploitation allowed it to determine
efficient operating conditions in a short time frame.
Compared to PPO, PPO showed good results, but not
as good as this due to convergence speed. As DQN is
mostly used on discrete action spaces, its limitations
became clear in the relative continuous and dynamic
environment of multiphase reactors. The figure 3
shows the Performance Evaluation Metrics.The
reward function was important to guide the agents to
optimal solutions. The reward function allowed
agents to perform both efficiently and with high
performance, balancing gas holdup, liquid velocity
uniformity with energy consumption. Through the
use of iteration on a few real reactor interactions,
agents were able to learn to greatly outperform
traditional processes. Proposed DRL algorithms
demonstrate the ability to solve the complexities
behind multiphase reactor dynamics. SAC
outperformed the alternatives, demonstrating a
computationally efficient, suitable framework for
longer term, complex real-world scenarios. The
results demonstrate the power of DRL in
transforming reactor operations and enable our
visions of sustainable and efficient industrial
processes. Thus, future work will expand on the
hybrid DRL-CFD approach and also validate the
framework in experimental reactor configurations.
6 CONCLUSIONS
The current study highlights the application of Deep
Reinforcement Learning (DRL) approach to optimize
hydrodynamic performance of multiphase reactors.
This study showcases the latest advancements in
DRL research for reactor control by demonstrating
the performance of three distinct algorithms: Deep Q-
Networks (DQN), Proximal Policy Optimization
(PPO), and Soft Actor-Critic (SAC). This dynamic
Comparative Study of Deep Reinforcement Learning Algorithm for Optimization of Hydrodynamic Characteristics in Multiphase Reactors
367

framework demonstrates an improvement in gas
holdup, liquid velocity profiles, and energy
consumption, which allows for a scalable approach to
optimizing industrial processes. Experiment results
showed that SAC was the best algorithm with the
optimal helping accuracy and the fastest convergence.
Also, while other trained models rely exclusively on
experience replay, in this high-dimensional,
continuous-action environment, we found that
entropic regularization, which allows balancing
exploration and exploitation, allowed the trained
model to achieve better performance in the reactor.
PPO also did well, but took longer to converge.
Although, DQN works fast on discrete environments
and does not work able to work with continuous
action spaces, which in turn makes it less suitable for
the dynamic needs of the reactor. These findings
highlight the versatility and feasibility of DRL agents
in industrial applications, thus enabling rapid and
efficient reactors management. In future efforts, we
will look forward to verifying the proposed method in
experimental setups, and merging DRL with hybrid
CFD models. This work lays the groundwork for
future improvements in smart process optimization
and offers value to sustainable and efficient industrial
operations
REFERENCES
Degaleesan, S., Dudukovic, M. P., & Pan, Y. (2001).
"Experimental study of gas-liquid flow in bubble
columns." Chemical Engineering Science, 56(21),
5681-5692.
Gao, F., Liu, W., & Sun, Z. (2021). "Real-time optimization
of bioreactors using proximal policy optimization."
Biochemical Engineering Journal, 173, 108085.
Guo, J., Huang, S., & Chen, F. (2019). "Deep Q-learning
for gas flow rate control in multiphase reactors."
Computers & Chemical Engineering, 126, 220-231.
Haarnoja, T., et al. (2018). "Soft actor-critic algorithms and
applications." arXiv preprint arXiv:1812.05905.
Haarnoja, T., et al. (2018). "Soft actor-critic algorithms and
applications." arXiv preprint arXiv:1812.05905.
Kober, J., Bagnell, J. A., & Peters, J. (2013).
"Reinforcement learning in robotics: A survey." The
International Journal of Robotics Research, 32(11),
1238-1274.
Krishna, R., & Van Baten, J. M. (2001). "Scaling up bubble
column reactors with process intensification."
Chemical Engineering Science, 56(21), 6237-6245.
Krishna, R., & Van Baten, J. M. (2001). "Scaling up bubble
column reactors with process intensification."
Chemical Engineering Science, 56(21), 6237-6245.
Li, X., Zhang, Q., & Chen, G. (2020). "Optimization of
chemical reaction conditions using deep reinforcement
learning." AIChE Journal, 66(1), e16885.
Li, Y., Xu, D., & Zhang, P. (2022). "Application of soft
actor-critic in hydrodynamic optimization of
multiphase reactors." Chemical Engineering Journal,
430, 132876.
Mnih, V., et al. (2015). "Human-level control through deep
reinforcement learning." Nature, 518(7540), 529-533.
Ranade, V. V., & Chaudhari, R. V. (2014). Multiphase
Reactors: Theory, Design, and Scaleup. Academic
Press.
Santosh. W. and Sathe, V., Study on the Gas Holdup of
Triangular Pitch and Square Pitch Sparger Geometry in
Bubble Columns, International Journal of Fluid
Mechanics Research, Vol.39, No.1, 2012, pp. 85-97.
Schulman, J., et al. (2017). "Proximal policy optimization
algorithms." arXiv preprint arXiv:1707.06347.
Schulman, J., et al. (2017). "Proximal policy optimization
algorithms." arXiv preprint arXiv:1707.06347.
Sutton, R. S., & Barto, A. G. (2018). Reinforcement
Learning: An Introduction. MIT Press.
Van Hasselt, H., Guez, A., & Silver, D. (2016). "Deep
reinforcement learning with double Q-learning."
Proceedings of the AAAI Conference on Artificial
Intelligence, 30(1).
Versteeg, H. K., & Malalasekera, W. (2007). An
Introduction to Computational Fluid Dynamics: The
Finite Volume Method. Pearson Education.
Wang, Y., Sun, Y., & Zhang, H. (2018). "Application of
reinforcement learning in optimizing stirred tank
reactors." Journal of Process Control, 67, 16-23.
Zhou, R., Liu, J., & Wang, Y. (2016). "Prediction of
hydrodynamic characteristics in bubble columns using
artificial neural networks." Industrial & Engineering
Chemistry Research, 55(9), 2510-2520.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
368
