
Soft Robotics for Advanced Handling of Delicate Fruit Products
Luan Lang
1a
, Rodrigo Antunes
1,2 b
, Martim Lima de Aguiar
1,2 c
, Nuno Pereira
1,2 d
,
Thiago Assis Dutra
1,2 e
, Yebo Lu
3f
and Pedro Dinis Gaspar
1,2 g
1
C-MAST - Centre for Mechanical and Aerospace Science and Technologies,
University of Beira Interior, Calçada Fonte do Lameiro 6, 6200-358, Covilhã, Portugal
2
Department of Electromechanical Engineering, University of Beira Interior,
Calçada Fonte do Lameiro 6, 6200-358, Covilhã, Portugal
3
College of Mechanical Engineering, Jiaxing University, Jiaxing, Zhejiang province, 314001, China
Keywords: Soft Robotic Grippers, Soft Grippers, TPU 60A, TPU 95A, Flexible Materials, Delicate Handling, Fin Ray
Effect, FRE, Robotics, Grippers.
Abstract: Soft robotic grippers can be an effective tool for handling sensitive and irregularly shaped objects, such as
horticultural products. This study evaluates three soft gripper designs—Straight, Constant Curve, and Beak—
fabricated using Thermoplastic Polyurethane (TPU) with shore hardness 60A and 95A. The grippers were
produced using a 3D printer and tested on a universal testing machine to assess mechanical performance.
Practical tests revealed that the Beak gripper made with TPU 60A exhibited superior performance, achieving
a peak force of 10.59 N at a displacement of 21.65 mm, making it suitable for delicate tasks like handling
fruits, without causing damage. In contrast, grippers made with TPU 95A, while possessing higher force
capacities, were excessively rigid and risked damaging delicate items. The study shows the importance of
material selection and gripper design in optimizing performance for specific applications. The findings validate
simulation data and indicate that TPU 60A is more appropriate for applications requiring gentle handling. Future
work includes testing with objects of varying shapes, conducting fatigue tests, and exploring multi-material
gripper designs with embedded sensing capabilities to enhance adaptability and control during use.
1 INTRODUCTION
Grippers, like robots themselves, are fundamental
elements in the modern industry, since the
manipulation of objects with various shapes is one of
the most common and complex challenges in the field
of robotics (
Youn, 2020
). To meet the tasks of
handling sensitive products or those with complex
geometries, soft grippers have been developed. They
are made from flexible materials, allowing
considerable deformation to adjust to the product
without damaging it. These grippers enable superior
results when handling sensitive and irregular objects,
a
https://orcid.org/0000-0002-2857-3092
b
https://orcid.org/0009-0002-6599-6905
c
https://orcid.org/0000-0003-0672-0378
d
https://orcid.org0000-0001-7177-751X
e
https://orcid.org/0000-0002-3576-5703
f
https://orcid.org/0000-0002-8995-370X
g
https://orcid.org/0000-0003-1691-1709
compared to grippers made from more rigid materials
(Dinakaran, 2008). With advances in technologies
such as additive manufacturing and more flexible
materials, soft grippers have become a more viable,
adaptable, and affordable solution. These advances
have allowed these grippers to be used more widely,
providing a simple, economical, and effective
approach to dealing with complex tasks such as safe
interaction with humans and handling fragile objects
(Zhai, 2023).
The fragility, sensitivity, stickiness, and
slipperiness of most food and agricultural products
have fuelled the development of soft robotic grippers
Lang, L., Antunes, R., Lima de Aguiar, M., Pereira, N., Assis Dutra, T., Lu, Y. and Gaspar, P. D.
Soft Robotics for Advanced Handling of Delicate Fruit Products.
DOI: 10.5220/0013928800003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 569-576
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
569

that are deformable, flexible, safe, low-cost, and
environmentally friendly (Liu, 2023). Thermoplastic
Polyurethane (TPU) is a thermoplastic elastomer
bridging the gap between rubbers and plastics. It
combines high flexibility and durability (Hasan,
2022), is widely available in a broad range of Shore
hardness values and exhibits excellent mechanical
strength. TPU is also readily available as a feedstock
material for Fused Filament Fabrication (FFF)
Additive Manufacturing (AM), making it suitable for
the production of soft robotic grippers.
(He, 2023) developed a rigid‑soft coupled robotic
gripper for adaptable grasping. The experimental
results showed that the proposed gripper can adapt to
objects with different properties (shape, size, weight,
and softness) and hold them steadily. The feasibility
of the design procedure was confirmed, as well as the
compliant and dexterous grasping capabilities of the
developed gripper. (Zapciu, 2017) developed an
adaptive robotic end effector-that used 3D printed Fin
Ray Effect (FRE) Soft Robotic Gripper Fingers
(SRGF) with embedded conductive 3D-printed
sensing circuits, which gave the end-effector
capacitive touch sensing and bend sensing
capabilities for manipulation of sensitive objects such
as fruits and vegetables.
The development of a robotic gripper for
agricultural robots must consider several factors, such
as the type of crop and its physical characteristics,
such as the shape, size, and sensitivity of the fruit or
vegetable. For example, the grippers need to be
adaptable enough to handle fragile items without
damaging them, which is critical in crops such as
tomatoes, apples and peaches. In addition, grippers
must be designed to operate in unstructured
agricultural environments, where variability in size
and shape, as well as the presence of leaves and
branches, can complicate the harvesting process.
Technologies such as sensors and artificial
intelligence algorithms can help the control of the
gripping and handling tasks to optimise harvesting
(Han, 2024), (Vrochidou, 2022).
In the case of flexible grippers, they have a
significant capacity for deformation within the elastic
regime. This ensures safe interaction with the
environment and minimises the risk of damaging
delicate objects. For this reason, these manipulators
are often chosen as end effectors in agricultural robots
for harvesting and sorting produce (Elfferich, 2022),
(Wang, 2023) and (Williams, 2019).
Soft grippers that rely on the FRE present a simple
economically viable approach to grasping objects of
various shapes (Yao, 2024). The biomimetic structure
eliminates the need for inbuilt actuation in the fingers,
thus facilitating passive adaptation to the surface of
an object upon contact. Since the introduction of the
FRE SRGF by Festo in 2016, extensive research has
inspired numerous innovative applications.
Prior work has demonstrated agricultural use
cases and flexible grasping with FRE-based soft
grippers.
However, systematic, side-by-side evaluations of
various rear-frame designs under the same materials
and test conditions are still mainly missing. Our study
fills this gap by comparing three geometries: Straight,
Constant Curve, and Beak, fabricated in TPU 60A
and TPU 95A using the identical Universal Testing
Machine (UTM) process and object set, and by
comparing the results with prior simulations. This
approach identifies material hardness and rear-frame
shape as the main design levers for the gentle
handling of delicate fruit.
Building on previous characterization and
computational simulation work (Lang, 2025), three
distinct FRE SRGF models were designed and
experimentally tested to evaluate the influence of two
key parameters: the Shore hardness of TPU and the
geometric shape of the finger’s rear frame side. The
tested geometric configurations included Straight,
Constant Curve, and Beak-shaped designs. The
results provide clear guidance: the TPU 60A Beak
achieves the best balance of compliance and force,
whereas TPU 95A is often too rigid for fragile
produce. We further link mechanics to outcome by
relating observed slippage/marking to the measured
force–displacement response and contact evolution,
and we show agreement with simulations,
strengthening actionable design rules for horticulture
and food-handling applications.
2 MATERIALS AND METHODS
The FRE SRGF design process was founded on a
simplified analysis of the structural elements of a
FRE SRGF, as described by Antunes (2024a) and
shown in Figure 1. This approach involved evaluating
the static force distributions across a segmented
model of the FRE SRGF, allowing a clearer
understanding of the mechanical role of each
component.
COBOTA 2025 - Special Session on Bridging the Gap in COllaborative roBOtics: from Theory to real Applications
570

Figure 1: Simplified representation of an FRE SRF with a
grasping force at the tip of the finger.
The material selected for this study was Filaflex TPU
in both 60A and 95A Shore hardnesses, produced by
Recreus Industries S.L. The chosen 3D printer was
the Artillery Sidewinder X1, shown in Figure 2,
because it was validated and recommended by the
filament manufacturer for printing these TPU
filaments (Recreus Industries S.L., 2024). This
contributed to achieving consistent print quality,
given the challenges associated with FFF AM of
highly flexible materials.
Figure 2: 3D printer Artillery Sidewinder X1.
Figure 3: Shimadzu Autograph AGS-X-50 kN (Shimadzu
Corporation, 2023).
The Precision Universal Tester Autograph AGS-
X-50 kN (Shimadzu Corporation, 2023) is shown in
Figure 3 and was used to carry out the tensile tests. It
features a reading resolution of 0.001 mm and a
sampling rate up to 1000 Hz (1ms). It is equipped
with TRAPEZIUM LITE X software to control tests
in real time and generate reports. (Shimadzu
Corporation, 2023).
The UR3e collaborative robot, shown in Figure 4,
is widely used for small-scale assembly tasks and
handling small objects (Universal Robots, 2024). The
use of this model, together with the actuator Robotiq
2F-85 Adaptive Gripper (Robotiq, 2020) was used,
and it allows enough customizability to adapt and
attach different types of gripper fingers. This flexibility
enabled testing with various SRGF, focusing on
handling delicate products, such as fruit, to assess their
suitability in gentle handling applications.
Figure 4: Cobot UR3e gripping a peach with the developed
FRE SRGF.
The three FRE SRGF models were designed using
Computer-Aided Design (CAD) based on the design
developed by Antunes (2024a) and Antunes (2024b),
as shown in Figure 5 were printed in TPU 60A and
95A. The printing orientation followed the procedure
based on (Lang, 2025).
(a) (b) (c)
Figure 5: Three FRE SRGF CADs: (a) Straight. (b)
Constant Curve. (c) Beak.
Soft Robotics for Advanced Handling of Delicate Fruit Products
571
To carry out the practical tests, a mechanism
developed in Antunes (2024a) and Antunes (2024b),
shown in Figure 6, was used. This allowed attaching
the SRGF to the Shimadzu Autograph AGS-X-50 kN,
and the control of the gripping width for grasping the
object shown in Figure 7.
Figure 6: Mechanism for the base and being able to carry
out practical tests.
Figure 7: Cylinder for carrying out the practical test.
3 RESULTS AND DISCUSSIONS
Practical tests were performed on a UTM with a built-
in load cell while the crosshead imposed a prescribed
finger-spacing trajectory. Each trial mounted two
identical fingers on the parallel mechanism and
grasped a rigid cylinder centred between them. The
measured force is the total normal gripping force
transmitted through the cylinder; under symmetric
contact, the per-finger force ≈ total force/2. Force–
displacement curves Figures 11, 12 and 13 were
derived directly from the UTM signal, using the same
displacement limit as in the simulations.
8 tests were carried out with each SRGF design, 5
of which were valid. For each test, each gripper model
was mounted on the mechanism developed to carry
out the tests, and the cylinder was aligned in the
centre so that both grips had the contact face area as
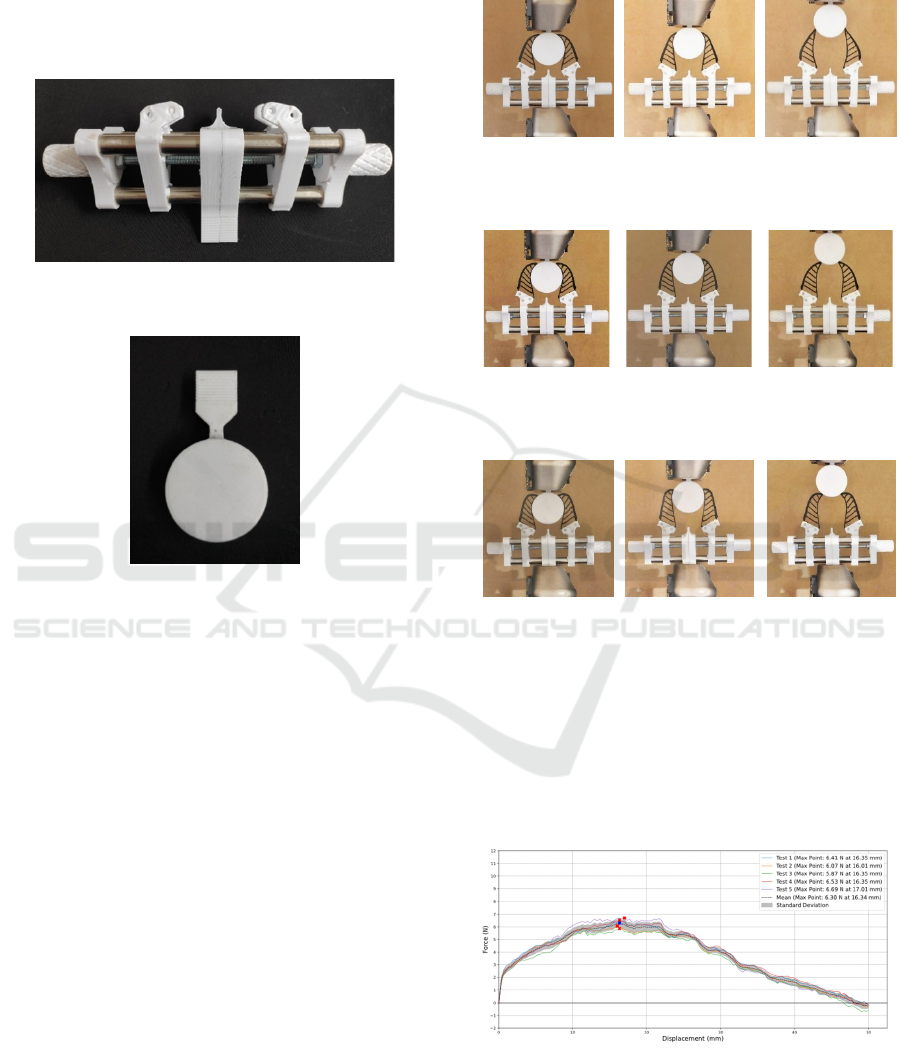
close as possible. Figure 8 shows the process of
carrying out the first valid test on the Straight model,
where (a) is the start of the test, (b) is the point where
the maximum force occurs and (c) is the end of the
test, the same occurs for Constant Curve in Figure 9,
and for Beak in Figure 10.
(
a
)
(
b
)
(
c
)
Figure 8: First Practical Test – Straight: (a) Beginning, (b)
Maximum Force; (c) End.
(a) (b) (c)
Figure 9: First Practical Test – Constant Curve: (a)
Beginning, (b) Maximum Force; (c) End.
(
a
)
(
b
)
(
c
)
Figure 10: First Practical Test – Constant Curve: (a)
Beginning, (b) Maximum Force; (c) End.
In the case of the Straight SRGF design, it can be seen
in Figure 11 that the maximum forces reached were
between 5.87 N and 6.69 N, with an average of 6.3 N
and a standard deviation of 0.82. All cases were
considered until 50 mm of displacement was reached,
as occurred in the computer simulations.
Figure 11: Valid Practical Tests - Straight.
The Constant Curve SRGF design results are shown
in Figure 12, the forces ranged from 9.67 N to 11.13
N, with an average of 10.37 N. These tests also
COBOTA 2025 - Special Session on Bridging the Gap in COllaborative roBOtics: from Theory to real Applications
572
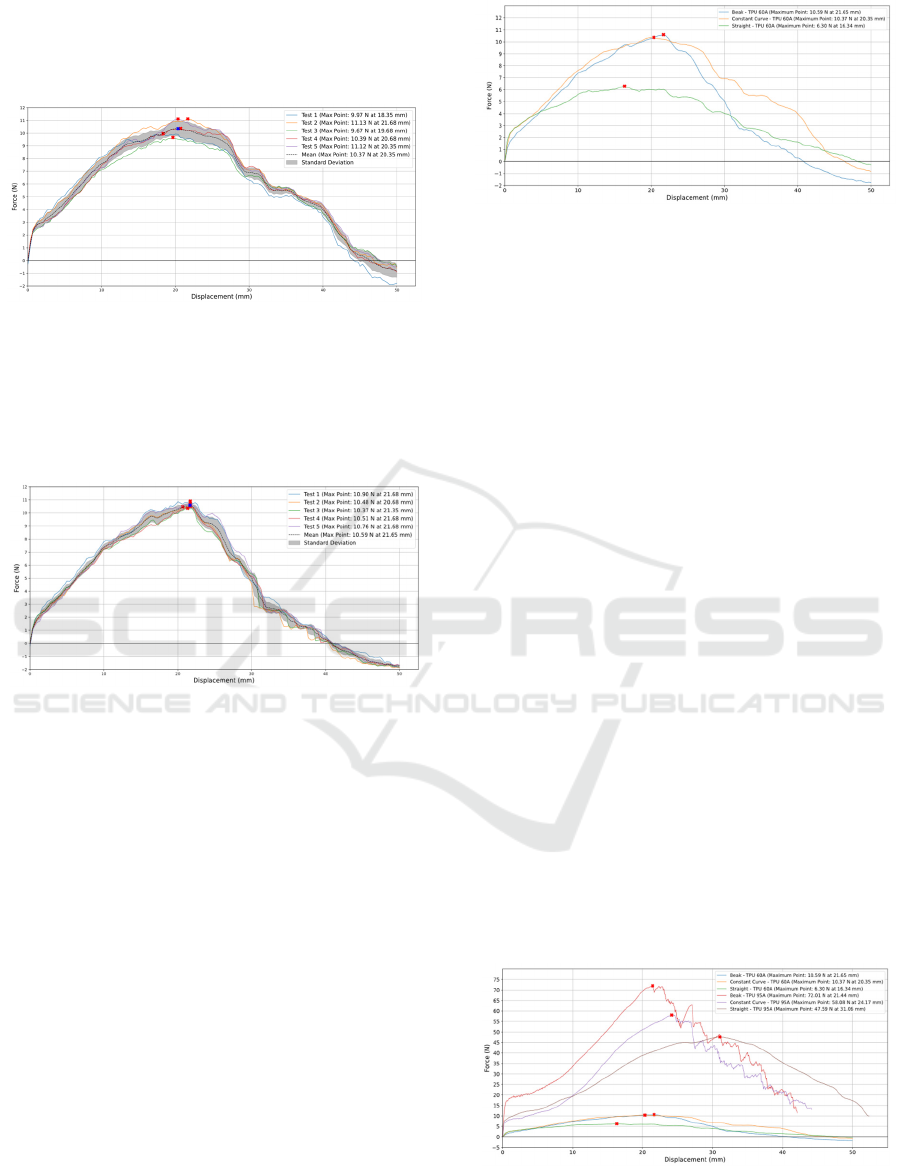
considered up to 50 mm of displacement. It should be
noted that this model has a higher standard deviation
(1.46), as the range of force values achieved was also
greater.
Figure 12: Valid Practical Tests – Constant Curve.
In the case of the results obtained for the Beak SRGF
design seen in Figure 13, the forces obtained in the
tests were between 10.48 N and 10.9 N, with a
standard deviation of 0.53 and an average of 10.59 N,
the highest of all the gripper models tested.
Figure 13: Valid Practical Tests – Beak.
Figure 14 shows the average of the Straight,
Constant Curve, and Beak SRGF designs tested. It
should be noted that the Beak SRGF design is the one
with the best result, followed by the Constant Curve
SRGF design and then the Straight SRGF design. Due
to the design developed, the Beak SRGF design, after
reaching the maximum point in terms of force, the
contact area of this design decreases, as the object is
only held at the top tips of the grippers, and therefore
ends up having an abrupt drop until the end of the test.
Analysing Figure 14, it is important to note that
all the designs showed negative forces towards the
end of the tests. This condition occurred since, when
they reached around 50
mm of displacement, the
object slipped and the grippers now under the object
were pushing it away, i.e., in compression rather than
traction. This behaviour indicates that, after a critical
point of displacement, the gripper is no longer
effective in supporting elongation, resulting in a
reversal of the applied force.
Figure 14: Average of the practical tests of the three gripper
designs.
This regime transition is particularly noticeable in the
Beak SRGF design and Constant Curve SRGF
design, which reached the highest force values but
also experienced the sharpest drop. The Straight
SRGF design, showed a lower peak force, although it
also showed relative stability in its behaviour until the
end of the test.
3.1 Comparison of Practical Grip
Results Between TPU 60A and TPU
95A
Testing and comparing the results of the SRGF
designs made from TPU 60A and TPU 95A in
practical tests allows for the practical understanding
of the mechanical behaviour of these materials in
their applications, such as handling fruit or delicate
objects. According to Antunes (2024a) and Antunes
(2024b), TPU 95A was chosen due to its favourable
balance of flexibility and mechanical strength.
Analysing Figure 15 and Table 1, the grippers
made with TPU95A can in fact apply a higher
maximum force before the object slips compared to
those made with TPU60A, reaching 72
N for the Beak
gripper, 58
N for the Constant Curve and almost 48 N
for the Straight gripper. These values are very high,
but this rigidity can be excessive for applications that
require a softer handling, such as fruit handling.
Figure 15: Grippers made of TPU 60A vs. TPU95A.
Soft Robotics for Advanced Handling of Delicate Fruit Products
573

Table 1: Comparison of maximum force values before
slipping between grippers produced with TPU60A and
TPU95A.
Grippers
Maximum Force
(TPU 60A) [N]
Maximum Force
(TPU 95A) [N]
Bea
k
10.59 72.01
Constant Curve 10.37 58.08
Straigh
t
6.30 47.59
(a) (b)
(
c
)
(
d
)
(e) (f)
(g)
(
h
)
(i) (j)
Figure 16: Beak gripper when picking up different objects:
(a) TPU60A- Nectarine. (b) TPU95A- Nectarine. (c)
TPU60A- Peach. (d) TPU95A- Peach. (e) TPU60A-
Orange. (f) TPU95A- Orange. (g) TPU60A- Soft Football.
(h) TPU95A- Soft Football. (i) TPU60A- Flexible Ball. (j)
TPU95A- Flexible Ball.
For this reason, although TPU 60A exhibits lower
resistance to deformation and a reduced maximum
gripping force before slippage, its greater flexibility
results in improved force distribution over the surface
of the grasped fruits (peaches, oranges, and apples)
with an average weight of 185
g. Given the relatively
low weight of these fruits, the maximum gripping
forces provided by TPU 60A remain sufficient for
reliable manipulation, ensuring gentle handling
without causing damage, while still providing
adequate durability for continuous use.
This condition can be seen in Figure 16 (a), (c),
(e), (g), and (i), where the Beak gripper printed with
TPU60A was tested by gripping a series of objects.
Figure 16 (b), (d), (f), (h), and (j) are for the same
objects, but the test was carried out with the Beak
gripper printed with TPU 95A. These figures test the
best-performing SRGF developed in a laboratory
environment when handling a variety of objects, with
a focus on fruit or fruit-like shapes.
Figure 17 (a), (b), (c), and (d) show the effect of
gripping the Beak grippers printed on TPU 60A and
TPU 95A. The gripper made with TPU 95A is more
rigid and stiff, leaving visible marks on the fruit. In
contrast, the fruit gripped with the gripper printed on
TPU 60A showed no visible damage, demonstrating
a softer grip suitable for delicate handling.
(a) Peach after being
gripped the gripper printed
with TPU 60A.
(b) Peach after being gripped
the gripper printed with TPU
95A.
(c) Orange after being
gripped the gripper printed
with TPU 60A.
(d) Orange after being
gripped the gripper printed
with TPU 95A.
Figure 17: Peach and Orange after being gripped by the
Beak gripper printed with TPU60A and TPU95A.
COBOTA 2025 - Special Session on Bridging the Gap in COllaborative roBOtics: from Theory to real Applications
574

4 CONCLUSIONS
Besides the practical tests used a rigid cylinder and a
small set of fruits. Tests were quasi-static with a
specific printer/material brand and printing
orientation, which was already tested (Lang, 2025).
The setup assessed a parallel two-finger grasp without
closed-loop sensing/control, but do not diminish the
central finding that TPU 60A Beak provides a
favourable compliance–durability trade-off for
delicate handling.
The practical tests indicated that the Beak gripper
performed best in terms of force capacity, followed
by the Constant Curve and then the Straight grippers.
The Beak gripper achieved a maximum force before
slippage of 10.59
N at a displacement of 21.65 mm,
demonstrating superior load-bearing capability. The
Constant Curve gripper closely followed with a
maximum force before slippage of 10.37
N at
20.35 mm, suggesting that its design is nearly as
effective as the Beak gripper. In contrast, the Straight
gripper reached a lower maximum force before
slippage of all the designs with 6.30
N at 16.34 mm,
implying that its less curved design is less efficient in
supporting loads.
All grippers showed a marked decrease in force after
reaching their maximum force before slippage values.
Despite no visible signs of fractures or plastic
deformation, future work should include fatigue tests
to assess gripper durability under prolonged and
cyclic use. It is also suggested that tests be carried out
with objects of different shapes in addition to the
cylinder used, broadening the scope of the practical
evaluation and computer simulation; performing
bruise-threshold quantification on representative
produce to map allowable contact pressures; multi-
material printing and embedded/skin sensing for
closed-loop grip control; surface liners/textures and
food-grade elastomers for hygienic wash-down.
These advances have the potential to add great
value to companies by offering custom solutions at a
lower associated cost.
Comparisons with grippers made from TPU95A,
as designed by Antunes (2024a) and Antunes
(2024b), revealed that, as expected, TPU95A offers
greater resistance to deformation, its high hardness
can compromise the integrity of delicate items like
fruit during handling. Grippers made with TPU60A
provide better adaptability by conforming to the
object shapes without sacrificing durability or
causing damage to the fruit, thus allowing delicate
handling of soft and perishable products.
The experimental results offer insights into how
the design of the frame’s rear side of FRE SRGF and
material selection impact gripper efficiency during
handling tasks.
ACKNOWLEDGEMENTS
These results are within the research activities of
project “ROBOTA-SUDOE - Robotics, Automation,
and Digitalization as Drivers of Competitiveness and
Growth for SMEs” (S1/1.1/P0125), which is co-
funded by the European Union through the European
Regional Development Fund (ERDF) and national
funds, under the territorial cooperation Interreg
Europe Programme 2021–2027 (eSUDOE 2021-
2027). This research was partially funded by the
Portuguese Foundation for Science and Technology,
I.P. (FCT, I.P.) FCT/MCTES through national funds
(PIDDAC), under the R&D Unit C-MAST/Center for
Mechanical and Aerospace Science and
Technologies, reference: Projects UIDB/ 00151/2020
(https://doi.org/10.54499/UIDB/00151/2020) and
UIDP/00151/2020 (https://doi.org/10.54499/UIDP/0
0151/2020)
REFERENCES
Antunes, R., Lang, L. M. C., de Aguiar, M. L., Dutra, T. A.,
& Gaspar, P. D. (2024a, August 4–6). Enhancing the
performance of Fin Ray effect soft robotic finger via
computational design and simulation. Paper presented
at the 20th ASME/IEEE International Conference on
Mechatronic and Embedded Systems and Applications
(MESA 2024), Genoa, Italy.
Antunes, R., Lang, L. M. C., de Aguiar, M. L., Dutra, T. A.,
& Gaspar, P. D. (2024b, August 4–6). Design of Fin
Ray effect soft robotic gripper for improved mechanical
performance and adaptability: Numerical simulations
and experimental validation. Paper presented at the
IEEE/ASME MESA 2024 Conference, Genoa, Italy.
Dinakaran, V. P., Balasubramaniyan, M. P., Muthusamy,
S., & Panchal, H. (2023). Performa of SCARA based
intelligent 3 axis robotic soft gripper for enhanced
material handling. Advances in Engineering Software,
176, 103352.
Elfferich, J. F., Dodou, D., & de Santina, C. (2022). Soft
robotic grippers for crop handling or harvesting: A
review. IEEE Access, 10, 75428–75443.
Han, C., Lv, J., Dong, C., Li, J., Luo, Y., Wu, W., &
Abdeen, M. A. (2024). Classification, advanced
technologies, and typical applications of end-effector
for fruit and vegetable picking robots. Agriculture, 14,
1776.
Hasan, M. J. (2022). Design and fabrication of an adaptive
gripper with Fin-Ray effect (Course report ME-3200).
Soft Robotics for Advanced Handling of Delicate Fruit Products
575

Department of Mechanical Engineering, Khulna
University of Engineering & Technology.
He, Z., Lian, B., & Song, Y. (2023). Rigid–soft coupled
robotic gripper for adaptable grasping. Journal of
Bionic Engineering, 20, 2601–2618.
Lang, L., Antunes, R., de Aguiar, M. L., Dutra, T. A., &
Gaspar, P. D. (2025). Mechanical characterization and
computational analysis of TPU 60A: Integrating
experimental testing and simulation for performance
optimization. Materials, 18(2), 240.
Liu, Y., Hou, J., Li, C., & Wang, X. (2023). Intelligent soft
robotic grippers for agricultural and food product
handling: A brief review with a focus on design and
control. Advanced Intelligent Systems, 5, 2300066.
Recreus Industries S.L. (2024). Filaflex 60A Technical
Data Sheet and Disclaimer. Retrieved from
https://recreus.com/en/products/filaflex-60a
Robotiq. (2020). Robotiq adaptive grippers. Robotiq.
Shimadzu Corporation. (2023). Autograph AGS-X series
[Product brochure]. Shimadzu Corporation.
Universal Robots. (2024, November 5). The UR3e.
Retrieved November 5, 2024, from https://www.uni
versal-robots.com/products/ur3-robot/
Veloso, A., Ilangovan, A., Baptista, C., Espírito-Santo, C.,
Amaro, C., Canavarro, C., Pintado, C. M., Morais, D.,
Ferreira, D., Beato, H., Luz, J. P., de Andrade, L. P.,
Resende, M., & Paul. (2022). PrunusPÓS. In Inovação
no pós-colheita de pêssego e cereja (p. 47). Empresa
Diário do Porto, Lda.
Vrochidou, E., Tsakalidou, V. N., Kalathas, I., Gkrimpizis,
T., Pachidis, T., & Kaburlasos, V. G. (2022). An
overview of end effectors in agricultural robotic
harvesting systems. Agriculture, 12, 1223.
Wang, X., Kang, H., Zhou, H., Au, W., Wang, M. Y., &
Chen, C. (2023). Development and evaluation of a
robust soft robotic gripper for apple harvesting.
Computers and Electronics in Agriculture, 204,
107534.
Williams, H., Ting, C., Nejati, M., Jones, M. H., Penhall,
N., Lim, J., Seabright, M., Bell, J., Ahn, H. S., Scarfe,
A., Duke, M., & MacDonald, B. (2019). Improvements
to and large-scale evaluation of a robotic kiwifruit
harvester.
Journal of Field Robotics, 37, 187–201.
Yao, J., Fang, Y., Yang, X., Wang, P., & Li, L. (2024).
Design optimization of soft robotic fingers biologically
inspired by the Fin Ray effect with intrinsic force
sensing. Mechanism and Machine Theory, 191,
105019.
Youn, J.-H., Jeong, S. M., Hwang, G., Kim, H., Hyeon, K.,
Park, J., & Kyung, K.-U. (2020). Dielectric elastomer
actuator for soft robotics applications and challenges.
Applied Sciences, 10, 5469.
Zapciu, A., Constantin, G., & Popescu, D. (2017). Adaptive
robotic end-effector with embedded 3D-printed sensing
circuits. MATEC Web of Conferences, 121, 01006.
Zhai, Y., Yan, J., Shih, B., Faber, M., Speros, J., Gupta, R.,
& Tolley, M. T. (2023). Desktop fabrication of
monolithic soft robotic devices with embedded fluidic
control circuits. Science Robotics, 8, eabq6270.
COBOTA 2025 - Special Session on Bridging the Gap in COllaborative roBOtics: from Theory to real Applications
576
