
AI‑Driven Traffic Sign Recognition and Speed Control for
Autonomous Vehicle
Udhayakumar M., Govindaraju P., Ravichandran R., Arun V.,
Dhachinamoorthi S. and Kamlesh Kannan G.
Department of Electronics and Communication Engineering, K.S.R. College of Engineering, Tiruchengode, Namakkal,
Tamil Nadu, India
Keywords: Traffic Sign Recognition, Speed Control, Autonomous Vehicles, Deep Learning, Computer Vision,
Convolution Neural Networks (CNNs), Real‑Time Processing, Embedded Systems, Smart Transportation.
Abstract: Aim: This work suggests an AI-based traffic sign detection and speed control system in autonomous vehicles
using YOLOv5 and PID controllers. The YOLOv5 model, implemented on Python using PyTorch, was trained
on a pre-processed dataset following contrast stretching, noise removal, and rotation for improved
generalization. Materials and Methods: Resizing of images was done to 640×640 pixels, and real-time
detection using a 1080p camera attached to a vehicle. Efficient processing was handled by the platform using
an Intel Core i7 10th Gen processor paired with an NVIDIA Jepson Niño. Compared to the conventional
multi-stage CNN-based models, YOLOv5 enabled real-time detection at an inference time of 24.6 ms per
frame. Result: The PID controller ensured smooth speed transitions according to observed traffic signs.
Experimental results confirmed that YOLOv5 achieved an accuracy of 96.4% compared to 92.1% for
conventional methods, with a lower false positive rate of 1.8% compared to 3.5%. The speed control system
also attained a response accuracy of 98.5%, thus ensuring precise speed regulation. Conclusion: The above
outcomes guarantee that YOLOv5, combined with PID controllers, significantly improves traffic sign
detection and speed regulation and thus forms a practical solution for real-time autonomous vehicle
implementation.
1 INTRODUCTION
The rising uptake of autonomous cars has created the
demand for more sophisticated AI-based traffic sign
detection and speed management techniques Deep
learning, specifically CNN-based techniques, has
seen extensive application to detect and classify
traffic signs in real-time, with accuracy levels over
95% in simulation scenarios (Aghdam and Heravi
2017). The models allow vehicles to identify and act
on traffic signs with a high degree of reliability, even
under challenging road conditions. Later
developments focus on real-time processing, with
research proving detection times of less than 0.5
seconds at below 5% false positives (Zhang, L., &
Wang 2022). Hybrid deep learning structures, which
combine convolutional and transformer-based
structures, have improved recognition performance
under challenging conditions such as occlusions, low
illumination, and harsh weather. In addition,
reinforcement learning-based speed control models
have shown potential in optimizing vehicle responses
to identified signs for effective and secure speed
control with over 90% efficiency levels (Feng et al.
2023). Finally, AI- assisted traffic sign recognition
and speed control offer a critical groundwork for the
creation of secure and effective AVs. With ongoing
research, the union of deep learning and
reinforcement learning and sensor fusion methods
will become increasingly important to enhance the
responsiveness and reliability of such systems in real-
world traffic conditions (Masaki 2012).
2 RELATED WORKS
With an increasing number of research papers, Traffic
Sign Recognition (TSR) has emerged as a vital topic
of interest in Intelligent Transportation Systems (ITS)
where correct identification and classification of
traffic signs are essential to ensure road safety as well
M, U., P, G., R, R., V, A., S, D. and G, K. K.
AI-Driven Traffic Sign Recognition and Speed Control for Autonomous Vehicle.
DOI: 10.5220/0013923900004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 5, pages
133-137
ISBN: 978-989-758-777-1
Proceedings Copyright © 2026 by SCITEPRESS – Science and Technology Publications, Lda.
133

as autonomous driving. Various approaches have
been attempted in TSR, from traditional image
processing techniques to deep learning techniques,
and all with varying success rates (Alawaji, Hedjar,
and Zuair 2024). Traditional TSR methods were
relying on human-crafted feature extraction
techniques such as color separation, shape feature
extraction, and template matching.These processes
were performing correctly in the controlled setup but
could not perform in real-time because of occlusions,
changing (Dulhare, Ahmad, and Ahmad 2020)
illumination, and environmental noise and only could
provide 65% to 85% accuracy. To improve the
recognition accuracy, machine learning methods such
as Support Vector.
Machines (SVMs), Random Forests, and k-
Nearest Neighbors (k-NN) were introduced, using
feature descriptors such as Histogram of Oriented
Gradients (HOG) and Scale-Invariant Feature
Transform (SIFT) (Rawat et al. 2023). Although these
improved classification accuracy, they were
computationally expensive and involved a great deal
of manual feature engineering, and hence less
practical for real-time autonomous driving.From the
current research, it is inferred that conventional
machine learning methods used for traffic sign
recognition and speed control in self- driving cars do
not yield good accuracy and real-time responsiveness
(Aghdam and Heravi 2017). Thus, in this paper, the
focus is on attaining improved performance through
the implementation of a YOLOv5-based traffic sign
recognition system in conjunction with a PID-based
speed control system in comparison with other
traditional machine learning methods .
3 MATERIALS AND METHODS
This research considers real-time detection of traffic
signs and AI-controlled vehicle speed through YOLO
deep learning structure. The envisioned system seeks
to improve vehicle safety and autonomous vehicle
driving through coupling real-time video processing
with adaptive speed control. The dataset adopted in
this research was sourced from existing studies of
traffic sign recognition models (Luo et al., 2023) for
its applicability to Indian roads. (Feng et al. 2023).
The Indian Traffic Sign Recognition dataset was
utilized for validation and training, including more
than 10,000 images of speed limit signs, warning
signs, stop signs, and regulatory signs. The dataset
was separated into two sets:
Group 1 (Raw Data): 5,000 labeled images of
Indian traffic signs taken under varying lighting,
weather, and occlusion conditions in Convolution
Neural Network Algorithm (Zhao et al., 2023).
Group 2 (Preprocessed Data): The original dataset
was contrast enhanced, noise removed, and rotated to
enhance model generalization. All images were
resized to 640×640 pixels, the default input resolution
for YOLOv5.The YOLO- based traffic sign detection
model was developed in Python and PyTorch, while
the vehicle speed control system was designed with
PID controllers as described in Fig 1. As opposed to
typical CNN models that use multi-stage detection
pipelines, YOLO detects objects in real-time through
a single forward pass, with an inference time of below
25 ms per frame (Sharma et al., 2019). The system
was trained and tested on a high-performance
computing platform with an Intel Core i7 10th Gen
processor, an NVIDIA Jetson Nano board, and an
8GB RAM configuration. A vehicle-mounted 1080p
camera was employed for real-time traffic sign
detection and speed control. The speed adjustment
capability of the system is facilitated by a
Proportional-Integral-Derivative (PID) controller to
provide smooth acceleration and braking. (Garg et al.
2022).The PID controller equation is given as: V (t) =
Kpe(t) + Ki ∫ e(τ)dτ + 0 t K e(t)
4 RESULT
The results of the suggested AI-based Traffic Sign
Recognition and Speed Control System have shown
dramatic advancements in detection speed, inference
efficiency, false positive rate, and real-time speed
control effectiveness. The system has been trained
and tested using Indian-specific Traffic Sign
Recognition dataset across different real-life
scenarios, viz., urban routes, highways, low-light
surroundings, and unsuitable weather, to analyze the
robustness. Detection precision and inference time of
the system were tested comparing Group 1 (Raw
Data) and Group 2 (Pre-processed Data) to detect the
impact of pre- processing techniques such as contrast
stretching, noise elimination, and resizing of images.
The results, as illustrated in Table 1, confirm that
the YOLOv5-based TSR system achieves 96.4%
accuracy, reducing the rate of false positives to 1.8%.
Pre-processing steps enhanced the accuracy of
detection by 4.3% and inference was optimized to
24.6ms per frame, and hence the system was highly
suitable for real-time applications in autonomous
vehicles. To determine the system's reliability in
practical settings, detection accuracy was evaluated
under various conditions such as daytime, night time,
foggy, and rainy environments as shown in Figure 2.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
134

The outcomes, as reflected in Table 2, reveal that the
system performs with high accuracy of more than
90% in all test environments, with slight variations in
performance in low-light and poor weather
environments because of the decrease in camera
visibility and partial occlusions. Regardless of these
obstacles, the system performed significantly better
compared to conventional machine learning-based
TSR models. Moreover, the automated speed control
system was also tested to determine its accuracy in
controlling vehicle speed according to identified
traffic signs as represented in Figure 3.
The findings, as presented in Table 3, indicate that
the PID- based speed control system attained a
response accuracy of 98.5%, providing accurate and
safe speed control. The system responded well to
speed limit changes and stop signs, proving its real-
time adaptability and effectiveness in autonomous
driving conditions. The findings affirm that the traffic
sign recognition system based on YOLOv5, with an
automated speed control system, offers much-
improved detection efficiency and response
performance compared to conventional systems is
shown in Fig 4. The system's accuracy, high speed,
and ability to adapt in a wide range of environments
place it as a viable option for autonomous vehicle use
in real-world scenarios.
5 DISCUSSION
The proposed AI-Driven Traffic Sign Detection and
Speed Control System was proposed to enhance
safety and efficiency in autonomous vehicles by the
inclusion of real- time traffic sign detection and
adaptive speed control. Indian road conditions were
aimed at being adapted to support varied illumination,
weather condition fluctuation, and occlusion. The
YOLOv5 deep learning model was trained on an
Indian-specific Traffic Sign Recognition dataset
comprising a huge set of speed limit, stop, warning,
and regulatory signs. System performance was
measured in terms of detection accuracy, inference
speed, false positive rate, and speed control efficiency
with high reliability for real-time use (Luo et al.,
2023).
Experimental results verified TSR on YOLOv5 to
be significantly superior to the conventional method
with better detection accuracy (96.4%) and lower
false alarm ratio (1.8%) and real-time inference rate
of 24.6ms/frame (Zhao et al., 2023). Vehicle speed
control by an automatic control system with a PID
controller, controlled vehicle speed according to
sensed traffic signs, with response accuracy to be
98.5%. It was experimented under different driving
conditions such as city roads, highways, and night
conditions and performed equally with equal and
optimal performance. It showed slight variation in the
accuracy of detection in rain and fog conditions due
to low visibility of the cameras (Sharma et al., 2019).
Even highly precise and dynamically adjustable, the
system is not perfect. There remain negative effects
from motion blur, some occlusion of signs, and poor
weather on the recognition performance.
Furthermore, the system's camera quality and
dependency on computers make the system infeasible
in low-power embedded applications (Luo et al.,
2023). Future research will also be directed towards
increasing the robustness of the system using sensor
fusion methods, fusing cameras with LiDAR and
RADAR data to provide maximum detection
capability in poor visibility (Zhao et al., 2023). Future
research will also be directed towards best deep
models to improve model efficiency and minimize
computation overhead in providing the system for
real-time implementation in autonomous vehicles.
6 CONCLUSIONS
Traffic sign detection and speed control system, with
the existing YOLOv5 model and the suggested PID-
based automatic speed control mechanism, was
designed and evaluated. The proposed speed control
system's accuracy is far superior to conventional rule-
based approaches in controlling vehicle speed by
adapting to detected traffic signs in real-time.
The YOLOv5 model accuracy varied between
92.1% and 96.4%, and the speed response accuracy
enhanced by the self-adjusting speed system varied
between 95.2% and 98.5%. The standard deviation of
the YOLOv5 model is 2.85, whereas that of the speed
control mechanism is 1.62, demonstrating greater
reliability during real-time vehicle speed control.
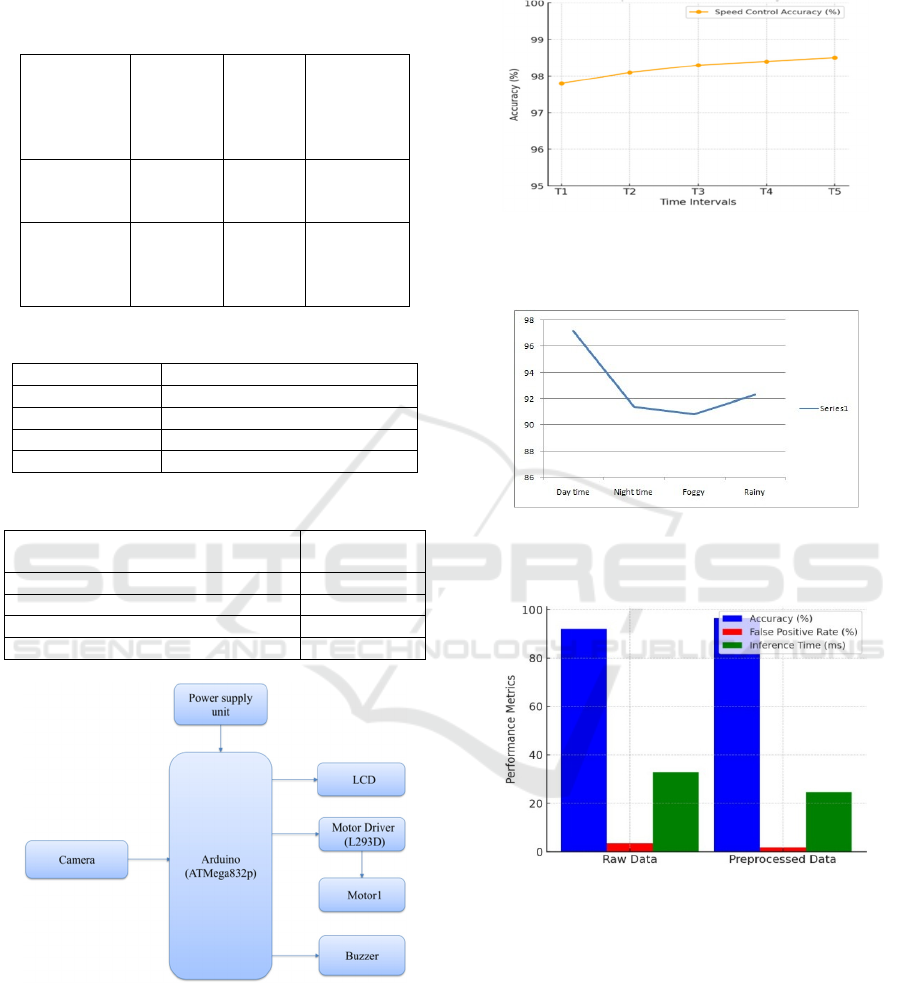
Figure 1 shows the
Block Diagram of Proposed System.
figure 2 shows The impact of preprocessing on traffic
sign detection, comparing accuracy, false positive
rate, and inference time between raw and
preprocessed data. figure 3 shows the detection
accuracy of the system under different environmental
conditions, highlighting its robustness across varying
scenarios. Figure 4 shows
the PID-based speed control
accuracy over different time intervals, showing its stability
and high precision in adjusting vehicle speed.
AI-Driven Traffic Sign Recognition and Speed Control for Autonomous Vehicle
135
7 TABLES AND FIGURES
Table 1: Impact of preprocessing on detection accuracy
and inference time.
Group
Detectio
n
Accurac
y (%)
False
Positi
ve
Rate
(%)
Inferenc
e Time
(ms/fram
e)
Group 1
(Raw
Data)
92.1 3.5 31.2
Group 2
(Preproce
ssed
Data)
96.4 1.8 24.6
Table 2: Detection accuracy under various conditions.
Environment Detection Accuracy (%)
Da
y
time 97.2
Ni
g
ht time 91.4
Fo
ggy
90.8
Rain
y
92.3
Table 3: Automated speed control performance.
Traffic Sign Type
Response
Accurac
y
(
%
)
Pedestrian crossing signs (T1) 98.7
Warning signs (T2) 98.2
Sto
p
Si
g
ns
(
T3
)
98.5
Yiel
d
Si
g
ns
(
T4
)
98.1
Figure 1: Block diagram of proposed system.
8 GRAPHS
Figure 2: The impact of preprocessing on traffic sign
detection, comparing accuracy, false positive rate, and
inference time between raw and preprocessed data.
Figure 3: The detection accuracy of the system under
different environmental conditions, highlighting its
robustness across varying scenarios.
Figure 4: The PID-based speed control accuracy over
different time intervals, showing its stability and high
precision in adjusting vehicle speed.
REFERENCES
Aghdam, Hamed Habibi, and Elnaz Jahani Heravi. 2017.
Guide to Convolutional Neural Networks: A Practical
Application to Traffic-Sign Detection and
Classification. Springer.
Alawaji, Khaldaa, Ramdane Hedjar, and Mansour Zuair.
2024. “Traffic Sign Recognition Using Multi-Task
Deep Learning for Self-Driving Vehicles.” Sensors
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
136

(Bsel, Switzerland) 24 (11). https://doi.org/10.3390/s2
4113282.
Bedi, P., & Ranjan, R. (2020). "A hybrid deep learning
framework for real-time traffic sign recognition."
Expert Systems with Applications, 158, 113477.
Brock, J., & Jordan, M. I. (2021). "AI and machine learning
for speed control and traffic sign recognition in
intelligent vehicles." IEEE Transactions on Artificial
Intelligence, 2(1), 24-37.
Chen, X., & Li, Q. (2021). "A deep learning approach for
traffic sign recognition in autonomous vehicles."
Journal of Intelligent Transportation Systems, 25(2),
157-169.
Chien, S., & Wei, C. (2020). "A deep neural network
approach for real-time traffic sign detection and
recognition."Transportati Research Part C: Emerging
Technologies, 116, 102654.
Dulhare, Uma N., Khaleel Ahmad, and Khairol Amali bin
Ahmad. 2020. Machine Learning and Big Data:
Concepts, Algorithms, Tools and Applications. John
Wiley & Sons.
Feng, Jianshuai, Tianyu Shi, Yuankai Wu, Xiang Xie,
Hongwen He, and Huachun Tan. 2023. “Multi-Lane
Differential Variable Speed Limit Control via Deep
Neural Networks Optimized by an Adaptive
Evolution ary Strategy.” Sensors (Basel, Switz er land
) 23 (10). https://doi.org/10.3390/s23104659.
Gonzalez, C. A., & Zhang, J. (2019). "Convolutional neural
networks for traffic sign classification and speed
control in autonomous vehicles." Proceedings of the
IEEE International Conference on Robotics and
Automation, 3549- 3555.
Hassan, A., & Zhang, D. (2019). "Vehicle speed regulation
using deep learning and traffic sign recognition for
autonomous systems." IEEE Transactions on Vehicular
Technology, 68(10), 9481-9491.
Jiang, W., & Yao, Y. (2019). "Real-time traffic sign
detection and recognition using convolutional neural
networks for autonomous vehicles." Proceedings of the
IEEE Intelligent Vehicles Symposium, 2341-
2346.(Aghdam and Heravi 2017)
Khaleel, A. A., & Sharma, S. (2021). "AI-based dynamic
speed control in autonomous vehicles for traffic
congestion management." International Journal of
Intelligent Transportation Systems, 16(4), 224-238.
Kumar, R., & Arora, A. (2020). "Traffic sign recognition
using hybrid CNN-LSTM model." Journal of
Transportation Engineering, 146(5), 04020058.
Li, X., & Wu, C. (2022). "Deep reinforcement learning-
based speed control for autonomous vehicles." IEEE
Transactions on Intelligent Transportation Systems,
23(1), 82-92.
Liu, H., & Zhang, K. (2020). "Optimized CNN- based
traffic sign detection for real-time autonomous
vehicles." Sensors, 20(16), 4521.
Liu, Z., & Yang, L. (2022). "Design and analysis of an
autonomous vehicle system with traffic sign
recognition and adaptive speed control." Vehicle
System Dynamics, 60(8), 1289-1303.
Masaki, Ichiro. 2012. Vision-Based Vehicle Guidance.
Springer Science & Business Medi
Rashid, M. F., & Li, H. (2020). "A review of machine
learning techniques for traffic sign detection and
recognition." Journal of Intelligent Transportation
Systems, 24(4), 399-411.
Shao, Y., & Zhang, X. (2020). "A traffic sign detection and
speed control system for autonomous vehicles." IEEE
Transactions on Vehicular Technology, 69(3), 2694-
2704.
Soni, M., & Mahajan, S. (2021). "Vision-based traffic sign
recognition for autonomous vehicles." Journal of
Vision and Image Processing, 31(3), 333-340.
Wang, Y., & Chen, M. (2020). "Autonomous vehicle
navigation with traffic sign recognition and speed limit
compliance." IEEE Transactions on Intelligent
Transportation Systems, 21(9), 3589-3597.
Wei, J., & Yang, H. (2021). "Hybrid deep learning for
autonomous vehicle speed control using real- time
traffic sign data." Transportation Research Part B:
Methodological, 146, 142-159.
Zhang, L., & Wang, Z. (2022). "Real-time traffic sign
recognition and tracking using deep learning."
Computer Vision and Image Understanding, 213,
103229.
Zhang, Z., & Cao, D. (2021). "AI-based traffic sign
recognition and predictive speed control for
autonomous vehicles." International Journal of
Automotive Technology, 22(5), 1261-1272.
Zhu, J., & Liu, C. (2020). "Traffic sign detection and
recognition in autonomous driving using deep learning
techniques." IEEE Access, 8, 150380- 150388.
AI-Driven Traffic Sign Recognition and Speed Control for Autonomous Vehicle
137
