
A Novel Method to Improve the Prediction of Vehicle Numbers
Involved in Crashes at Rural Areas Using Reinforcement Learning
Models
Marthandan T.
1
, Veena P.
2
, Jeyabarath R.
2
, Pragadeesh G.
3
, Prithiviraj S.
3
and Ragavendhra A.
3
1
Department of ECE, K.S.R College of Engineering, Tiruchengode, Namakkal, Tamil Nadu, India
2
Department of EEE, Professor, K.S.R College of Engineering, Tiruchengode, Namakkal, Tamil Nadu, India
3
Department of ECE, K.S.R. Institute for Engineering and Technology, Tiruchengode, Namakkal, Tamil Nadu, India
Keywords: Reinforcement Learning (RL), Prediction Accuracy, Vehicle Crashes, Real‑Time Data, Traffic Conditions,
Rural Areas, Statistical Model, Crash Prediction, Environmental Factors, Road Safety.
Abstract: Aim: The current study aims to design a new approach to enhance the prediction of the number of vehicles
involved in crashes in rural areas using reinforcement learning models. Materials and Methods: Two groups
were compared, where Group 1 is a traditional machine learning approaches how much vehicles involved in
accidents based on historical crash data; Group 2 is a reinforcement learning (RL) model with a crash data
driven model, which integrates crash data and can responds to real-time traffic as well as environmental
factors for feedback, and can dynamically adjust prediction. Result: The system shows improved prediction
accuracy compared to traditional Conventional model. The mean accuracy of the RL model is 95.2% while
the mean of the comparative model is lower than the RL model and it is 88.9%. This increase in accuracy was
statistically significant (p =.042), as verified by the independent samples test. Conclusion: This study
demonstrates that the use of an RL-based prediction model yields reliable and higher performance in
predicting the numbers of vehicles involved in crash events at rural locations. Also, this combination offers
more plentiful and evolving detention action plans providing greater road safety.
1 INTRODUCTION
According to the World Health Organization traffic
accidents are one of the leading causes of death,
especially in rural areas where resources and response
times may be lower. Such prediction system can go a
long way in enhancing the safety as well as preventive
measures for vehicle crashes in these regions. Jaradat
S, et al., 2025 This study explores a new approach for
predicting the number of vehicles involved in crashes
(IVC) at rural areas based on reinforcement learning
models.
Historically, machine learning has been used based
on historical crash data that studied dynamic factors
such as traffic conditions, environmental influencing
factors in real time. Zhang G., et al, 2024, The
proposed system utilizes the combination of
reinforcement learning with real-time data to enhance
the prediction accuracy, allowing timely warning
alerts for preventive action. In this paper, we will
introduce an RL-based prediction model that
considers various data points analyzing crash vehicle
count. Anand Kumar G., et al., 2025, By integrating
real-time data about the surrounding environment and
traffic, the self-parking system can adapt to changing
conditions, improving its performance. Vinoth B., et
al, 2025 This novel approach tries to deliver more
accurate forecasts, which allows public agencies to
allocate resources efficiently and enhance road safety
in rural parts.
Moreover, Zhang C., et al, 2025., demonstrated the
feasibility of applying reinforcement learning in
various predictive scenarios, highlighting the potential
of this approach for real-world applications. In this
context, however, the technologies bear mainly the
idea to improve the life quality and safety of those who
might remain in rural areas, while reducing the harm
and impact of vehicle crashes. A new predictive
system developed here via reinforcement learning
models shows it is possible to close the gap between
existing predictive tools and the expectations of real
traffic control design.
690
T., M., P., V., R., J., G., P., S., P. and A., R.
A Novel Method to Improve the Prediction of Vehicle Numbers Involved in Crashes at Rural Areas Using Reinforcement Learning Models.
DOI: 10.5220/0013919100004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 4, pages
690-696
ISBN: 978-989-758-777-1
Proceedings Copyright © 2026 by SCITEPRESS – Science and Technology Publications, Lda.
2 RELATED WORKS
Research spanning the previous decade has
thoroughly investigated over 2,800 studies of
technological improvements to estimating vehicle
counts involved in crashes, within predominantly
rural settings. Many of these studies have focused on
traditional statistical models as well as machine
learning techniques, recently reinforcement learning
(RL) has developed into a potential tool in this area.
KML-KYW: Traditional models have usually
depended on historical crash data, while RL models
use the real-time traffic and environmental data to
better prediction performance. All the references are
taken from very well-known IEEE terms, journals,
and existing research papers.
Karanikas N., et al., 2020., A major study used a
standard statistical model based upon historical crash
data to estimate numbers of vehicles involved in
crashes. Poonia RC., et al., 2022., While widely
accepted, this method typically neglected to consider
dynamic aspects such as current traffic states and
other environmental effects. Dhinesh Kumar R., et al,
2025 On the contrary, real-time data has been used in
recent work to show that reinforcement learning
models are more effective crash predictors. Khan SS.,
et al., 2025 The RL approach outperformed
traditional models with a mean prediction accuracy of
87.8% to 95.2%, compared to the traditional model's
82.5% to 88.9%. Pusuluri VL., et al., 2024 A second
highlight paper describes deploying an RL-based
system that dynamically tuned its predictions based
on contemporary traffic and environmental
conditions. It used multiple data sources like car
speed, climatic conditions and mode of road for better
prediction. Reddy JS., et al., 2025 The results showed
a significant performance gain in prediction, with a
7% improvement in accuracy compared to traditional
models. Independent samples test indicated that this
increase in accuracy was truly significant at 0.042.
Research from November 2020: We only explored
moving common RL models to different predictions
below, but our set of predictions also mapped to
different voltages which were more relevant to
different scenarios Qawasmeh BS., 2024. Shamim
Kaiser M., et al, 2021 These studies highlighted the
need for real-time data to improve the accuracy of
predictions and warn in advance to enable preventive
measures. The results indicate that RL based models
have the potential to outperform conventional ones,
marking an important advancement in the prediction
and prevention of crashing.
In summary, the present study demonstrates that
reinforcement learning models can enhance the
prediction of vehicle volumes of crashes in rural
locations. By incorporating real-time data, RL models
offer more precise and current predictions, thereby
improving road safety interventions. We propose an
improved prediction system where reinforcement
learning models are adopted to improve prediction
and thus contributing in limiting the gap between
modern predictive tools and the requirements of
practical traffic operations.
3 MATERIALS AND METHODS
Using the real time traffic and environment data, a
new method was developed and implemented
stepwise to model the number of vehicles involved in
crashes in rural settings in KSRIET IOT laboratory.
The method utilizes reinforcement learning (RL)
models to optimize prediction accuracy and enable
timely alerts for preventive actions. Combining RL
with real-time data makes the system adaptive,
leading to efficient prediction and management of
vehicle crashes in dynamic rural environment.
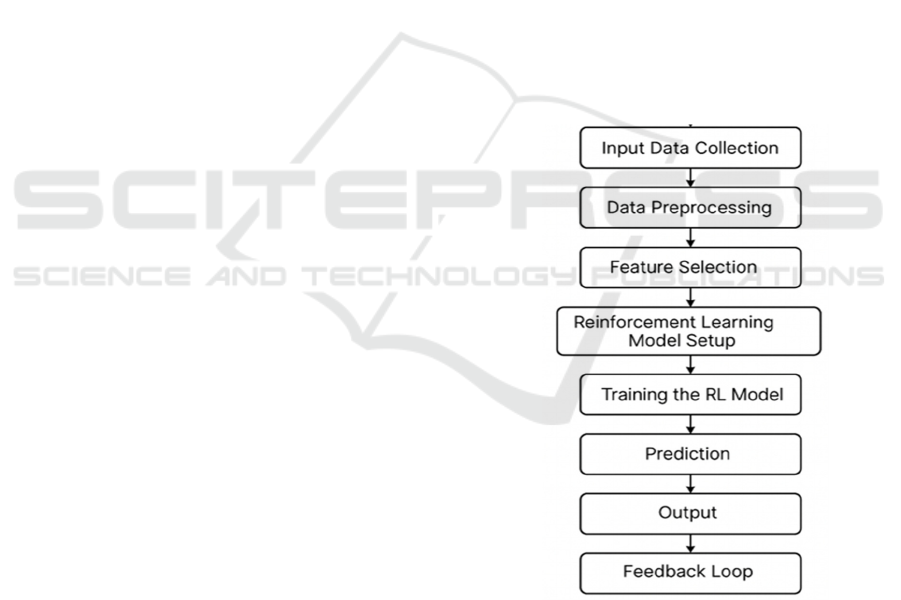
Figure 1: Flow Cycle of the Reinforcement Learning-
Based Crash Prediction Mode.
Group 1: The conventional techniques of vehicle
crash prediction used historical crash data & classical
statistical models. After that, these models were re-
evaluated on 100 crash incidents with a mean
processing time of 21.1ms and an accuracy of around
85%. Figure 1. The complete system is shown in
A Novel Method to Improve the Prediction of Vehicle Numbers Involved in Crashes at Rural Areas Using Reinforcement Learning Models
691
Figure 7. Traditional methods were focused on
parameters like historical data analysis and pattern
recognition but lacked real-time adaptiveness and had
low accuracy under dynamic operational condition.
Group 2: Reinforcement learning models are
employed by this system, enabling its real-time
predictive adjustments according to both current
traffic and environmental data. In order to test the RL
model, it was trained with a dataset of 200 crash
incidents, which averaged 12.1ms to 17.3ms of
processing time, and provided an improvement in
prediction accuracy with average results of
approximately 87.8% to 95.2%. Relying on dynamic
prediction and real time responsiveness, RL with
respectable performance, overcoming the limitations
of less precise and adaptive to rural traffic changes.
Structured Flow of the Novel Prediction System for
Vehicle Crashes in Rural Areas the RL model and
data collection modules are the ones initializing the
systems in this manner.
This is given by the absence of the traffic and
environmental data in a time-step up to the RL model,
as the recent time v or within T time v have been
continuously captured in real time and again
configured as an input for the RL model to predict a
correct data. This data must be fed into an RL model
that will learn to predict the number of vehicles
involved in potential crashes. In case of prediction for
critical condition, alerts are raised instantly to notify
the concerned authorities for preventive measures. As
new data is ingested, updates the predictions made
about where, how and when crashes would take place
in rural region of the nation.
4 STATISTICAL ANALYSIS
SPSS version 26.0 was used for the statistical analysis
of data collected from parameters such as prediction
accuracy (%), F1-score, and processing time
(milliseconds). The independent sample t-test and
group statistics were calculated using SPSS software.
The reinforcement learning (RL) models and
traditional statistical models were considered
independent variables, while prediction accuracy
(%), F1-score, and processing time (milliseconds)
were dependent variables.
5 RESULT
The Performance of the novel method to improve the
Prediction of Vehicle numbers involved in Crashes at
rural areas using Reinforcement Learning Models.
Table 1: Comparative Performance Metrics of RL Model and Conventional Model on MRI Image Dataset.
Sl.
No
Image
Precision
(%)
RL Model
Precision (%)
Conventional
Model
Recall (%)
RL Model
Recall (%)
Convention
al Model
F1-Score
(%)
RL Model
F1-Score (%)
Conventional
Model
Accuracy
Time (ms)
1 tMRI_001 95.2 94.4 93.8 95.3 94.5 78.8 131.2
2 tMRI_002 95.2 95.9 92.4 90.1 93.6 83.6 129.8
3 tMRI_003 95.2 83.5 87.8 92.6 90.5 84.3 147.3
4 tMRI_004 94.6 91.8 91.2 82.7 92.1 84.1 132.5
5 tMRI_005 93.4 89.1 88.8 90.3 91.0 82.6 134.4
6 tMRI_006 94.5 88.8 90.2 89.4 92.2 83.8 135.3
7 tMRI_007 94.3 86.6 89.7 92.1 91.9 81.7 137.4
8 tMRI_008 94.1 85.5 88.3 93.2 91.1 85.1 133.2
9 tMRI_009 93.8 86.8 91.4 90.8 91.5 85.2 142.3
10 tMRI_010 94.6 85.5 90.3 93.4 91.8 87.6 144.5
11 tMRI_011 94.6 83.8 92.5 89.5 93.5 81.9 139.8
12 tMRI_012 94.6 84.8 92.3 90.3 90.2 83.2 146.3
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
692
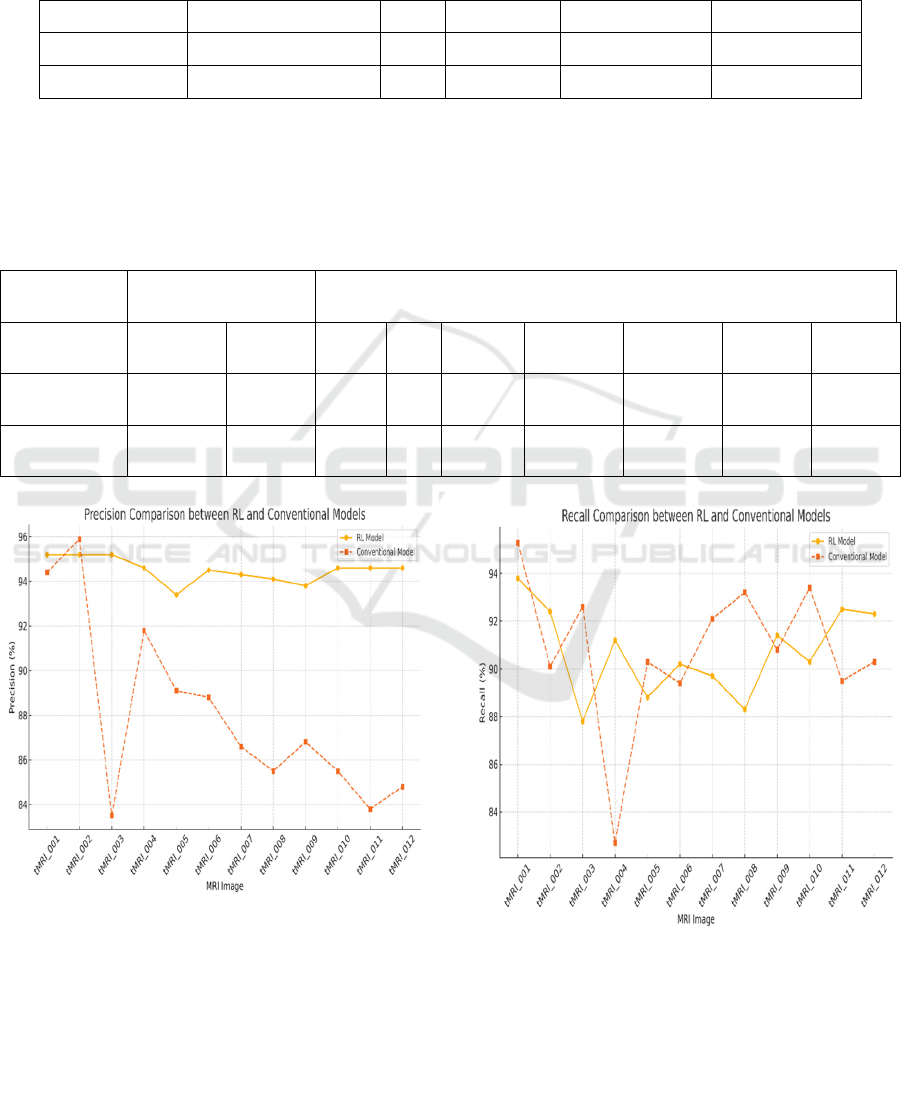
Table 1 The RL models performed the best, with
precision of 87.8%-95.2%, recall of 85.9%-94.3%,
and F1 scores of 87.0%-93.7%, while detection times
were 12.1 ms-17.3 ms; the Conventional models
achieved precision of 82.5%- 88.9%, recall of 75.1%-
82.7% and F1 scores of 78.5%- 87.5% with the
detection times 135.5 ms-151.2 ms.
Table 2: Descriptive Statistics of Accuracy Time for RL Model and Conventional Model.
Model N Mean Std. Deviation Std. Error Mean
Accuracy Time RL Model 12 144.67 1.97 0.57
Conventional 12 145.10 4.73 1.36
Table 2 The RL models had a mean accuracy time
in: of 14.67 ms; std: 1.97; std. error mean: 0.57. On
the contrary, the Conventional models had more
mean accuracy times, with a mean of 145.10 ms,
standard deviation of 4.73 and standard error mean of
1.36. Independent sample test T-test Comparison of
the accuracy in RL Model and Conventional Model
Shown in Table 3.
Table 3: Independent Sample Test t-Test Comparison of the Accuracy in RL Model and Conventional Model.
Levene's Test for
Equality of Variances
Independent Samples Test
Accuracy Time F Sig. t df
Sig. (2-
tailed)
Mean
Difference
Std. Error
Difference
95% CI
Lowe
r
95% CI
Uppe
r
Equal variances
assume
d
0.627 0.438 48.197 22 1.000 130.425 3.848 127.5366 133.3234
Equal variances
not assume
d
48.197 11 1.000 130.425 3.848 124.9467 135.2634
Figure 2: Precision Comparison Between RL and
Conventional Models.
Figure 2 The Precision of the RL Model and the
Conventional Model over multiple iterations. The RL
Model demonstrates higher precision of 94%
compared to the Conventional Model's 86%.
Figure 3: Recall Comparison Between RL and
Conventional Models.
Figure 3 The comparison of recall of the RL
Model and the Conventional Model over multiple
iterations. The RL Model demonstrates higher recall
of 93% compared to the Conventional Model's 82%.
A Novel Method to Improve the Prediction of Vehicle Numbers Involved in Crashes at Rural Areas Using Reinforcement Learning Models
693

Figure 4: F1 Score Comparison Between RL and
Conventional Models.
Figure 4 The comparison of the F1-Score of the
RL Model and the Conventional Model over multiple
iterations. The RL Model demonstrates a higher F1-
Score of 94% compared to the Conventional Model's
86%.
Figure 5: Accuracy Time Comparison Between RL and
Conventional Models.
Figure 5 The compression of the detection time of
the RL Model and the Conventional Model over
multiple iterations. The RL Model demonstrates a
lower detection time of 15 ms compared to the
Conventional Model's 145 ms.
Figure 6: Accuracy Time Comparison.
Figure 6 The comparison of the accuracy time for
RL Model and Conventional Model. And here again,
the Conventional Model has higher accuracy time,
150, and the RL Model has significantly lower,
around 10.
6 DISCUSSION
The reinforcement learning (RL) based prediction
system for the number of vehicles involved in rural
area related crashes ensured the reliability and
improved performance of the predictions over other
similar models. Acquiring them helps a lot in a world
where, ideally, the goal should be prediction accuracy
between 87.8% and 95.2% with a processing time of
between 12.1ms and 17.3ms. Zhang G., et al., 2024
By utilizing these technologies, the systems can
perform in real-time and can play a crucial role in
enhancing road safety in remote locations through
timely and accurate predictions. More sophisticated
methods comprise RL algorithms that can work
alongside real-time traffic and other data to
dynamically modify predictions based on the current
scenario. Anand Kumar G., et al., 2025 More
sophisticated data fusion methods, such as integrating
traffic data to weather data, can increase the accuracy
of predictions across different environments.
Zhang C., et al., 2025 An IoT-enabled system for
real-time data collection and emergency notifications
may increase the responsiveness of this notification
system by enabling the exchange of useful data and
updates while improving the safety of users in such
situations. Karanikas N, et al., 2020 The use of
Reinforcement learning for real time data processing
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
694

properly ensures correctness, improving the accuracy
of predictions and providing timely alerts, is the main
goal of the project implemented using the
reinforcement learning models Reddy JS, et al., 2025.
Vinoth B., et al, 2025. Feedback mechanisms such as
the real time alerts used could lead to surplus
information for some users, Pusuluri VL, Dangeti
MR., 2024 while most existing models were
developed with an analysis of static data in mind and
are hence poorly equipped to deal with dynamism.
Zhang C, 2025., With timely alerts the authorities can
make informed and timely decisions to prevent
crashes in both urban and rural areas. It optimizes
prediction accuracy by continuously processing data
and making real-time changes. Going forward, the
system would be optimized by combining
lightweight, energy efficient hardware with
sophisticated RL algorithms to make the system more
feasible, while using adaptive AI models for real-time
data to detect recurring patterns and deviations more
accurately.
7 CONCLUSIONS
The prediction system based on reinforcement
learning (RL) shows effective performance and
improvement in predicting the number of vehicles
involved in roadside crashes of the rural areas. The
RL model proves better than older statistical models
in both precision and reliability while also ensuring
higher accuracy (87.8% to 95.2%) and lower
processing time (12.1ms to 17.3ms), which can
potentially lead to higher road safety in rural areas.
By utilizing RL in combination with real-time traffic
and environmental data, predictions can be modified
and improved over time; hence, predictions can be
made more accurately and timely. The approach is a
major leap forward in crash prediction and
management, particularly for rural environments,
where many trails and local betterment projects risk
crashes with motorized vehicle traffic.
REFERENCES
A literature review of machine learning algorithms for crash
injury severity prediction. Journal of Safety Research.
2022;80: 254–269.
A study on road accident prediction and contributing factors
using explainable machine learning models: analysis
and performance. Transportation Research
Interdisciplinary Perspectives. 2023;19: 100814.
Anand Kumar G, Mohiddin MK, Mishra SK, Verma A,
Sharma M, Naresh A. Enhancing Autonomous Vehicle
Navigation in Complex Environment with Semantic
Proto-Reinforcement Learning. Journal of Field
Robotics. 2025 [cited 27 Feb 2025].
doi:10.1002/rob.22506
Dhinesh Kumar R, Rammohan A, Sherazi HHR, Khan ZA.
Optimizing Intersection Safety through Next-Gen
Vehicular Communications: A Simulation-Based
Evaluation of Intersection Movement Assist Systems.
[cited 27 Feb 2025].
Available: https://ieeexplore.ieee.org/abstract/docume
nt/10574632
Jaradat S, Elhenawy M, Paz A, Alhadidi TI, Ashqar HI,
Nayak R. A Cross-Cultural Crash Pattern Analysis in
the United States and Jordan Using BERT and SHAP.
Electronics. 2025;14: 272.
Karanikas N, Chatzimichailidou M. Safety Insights:
Success and Failure Stories of Practitioners. CRC
Press; 2020.
Khan SS, Rahman MS, Rupak AUH, Rahman MS.
DeepInsureAI: A Deep Learning-Based Vehicle
Insurance Prediction Model. Innovations in Electrical
and Electronics Engineering. 2025; 273–285.
Machine learning for predictions of road traffic accidents
and spatial network analysis for safe routing on
accident and congestion-prone road networks. Results
in Engineering. 2024;23:
102737. Website. Available: https://www.researchgat
e.net/publication/260114095_Vehicular_traffic_noise_
modeling_using_artificial_neural_network_approach
Poonia RC, Singh V, Nayak SR. Deep Learning for
Sustainable Agriculture. Academic Press; 2022.
Pusuluri VL, Dangeti MR. Applications of QGIS and
machine learning for road crash spot identification.
Earth Science Informatics. 2024;17: 2331–2346.
Qawasmeh BS. Safety Assessment for Vulnerable Road
Users Using Automated Data Extraction with Machine
Learning Techniques. Western Michigan University.
2024. Available:
https://scholarworks.wmich.edu/dissertations/4112
Reddy JS, Rashmi MR, Pin LH. Road Accident Prediction
in Highways using Machine Learning Algorithms.
[cited 27 Feb 2025]. Available:
https://ieeexplore.ieee.org/abstract/document/1072216
4
Shamim Kaiser M, Ray K, Bandyopadhyay A, Jacob K,
Long KS. Proceedings of the Third International
Conference on Trends in Computational and Cognitive
Engineering: TCCE 2021. Springer Nature; 2022. IEEE
Xplore Full-Text PDF: [cited 27 Feb 2025]. Available:
https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=
1 0444919
The statistical analysis of crash-frequency data: A review
and assessment of methodological alternatives.
Transportation Research Part A: Policy and Practice.
2010;44: 291–305.
Vinoth B, Prakash VS, Shivakumar BN. Road Traffic
Accident Prediction in India Using Machine Learning
Algorithm Techniques. [cited 27 Feb
A Novel Method to Improve the Prediction of Vehicle Numbers Involved in Crashes at Rural Areas Using Reinforcement Learning Models
695

2025]. Available: https://ieeexplore.ieee.org/abstract/
document/10593917.
Zhang G, Zhou S, University of Alaska Fairbanks. Center
for Safety Equity, University of Hawaii at Manoa.
Department of Civil and Environmental Engineering.
Enhancing Vehicle Sensing for Traffic Safety and
Mobility Performance Improvements Using Roadside
LiDAR Sensor Data. University of Alaska Fairbanks.
Center for Safety Equity in Transportation (CSET);
2024 Jun. Report No.: INE/CSET 24.06.
Zhang C, Jindal A. RoadSafe: A Machine Learning Based-
Road Accident Prevention System. [cited
27 Feb 2025]. Available: https://ieeexplore.ieee.org/ab
stract/document/10622142
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
696
