
Hybrid Approach to Optimize Delivery Route with K‑Dimensional
Tree and Dijkstra’s Shortest Path Algorithm
Purab Sen, Aaditya Yadav, Abhishek Pandey, Samip Aanand Shah,
Mehul Singh Bhakuni and Gayathri Ramasamy
Department of Computer Science & Engineering, Amrita School of Computing, Amrita Vishwa Vidyapeetham, Bengaluru,
Karnataka, India
Keywords: K‑D Tree, Dijkstra’s Algorithm, K‑Nearest Neighbor, Shortest Path, Route Optimization.
Abstract: To overcome the inefficiency of the traditional routing methods when it comes to route planning, this paper
introduces a hybrid technique of K-D trees and Dijkstra's algorithm that can be used to plan optimal delivery
routes. As the number of deliveries points and areas grow in large-scale delivery networks, it becomes more
challenging to find the shortest path. The approach in this method uses K-D trees for spatial partitioning to
reduce search space by identifying the closest delivery locations. TIME HEFT (Time Heuristic for TSP) (Wu
et al., 2019) is a traditional TSP solving method based on heuristics. After determining the nearest neighbor,
Dijkstra’s algorithm calculates the shortest path ensuring that it optimally navigates the graph with the least
computational overhead. Designed to accelerate computation and scale far better than traditional methods,
this integration allows for route optimization. The implemented system using Java Swing, contains a user
interface that allows a vehicular route to be displayed interactively by inputting the delivery locations and
also providing the best route possible to the user. To prove its efficacy, we present the experimental results
demonstrating that our proposed approach not only significantly reduces the computation time but also
achieves comparably good accuracy compared to the baselines, indicating its effectiveness for the logistics
and delivery operations that require dynamic and efficient routing of goods.
1 INTRODUCTION
Delivery route optimization is one of the most used
concepts in modern logistics companies. Consumer
demand for speed and cost-effective shipping is on
the rise, accompanied by the need for sophisticated
solutions to make logistics networks more efficient
across companies. Indeed, one of the main challenges
in this process is deciding which course to take to
make deliveries to different places, particularly in a
large, geographically-distributed network.
Conventional route optimization methods have
clear computational challenges, particularly in
addressing a large volume of delivery points. Many
existing approaches leverage exhaustive search
algorithms that, even if comprehensive, can be
computationally expensive to implement, making
them hard to apply in a real-time logistics context.
Mandates for lower emissions and increased
utilization must be balanced with competing goals for
efficiency, yet current methods leave a lot to be
desired, with nona-linear optimization techniques and
other processes requiring huge amounts of
computational capacity.
This study proposes an integrated methodology
leveraging K-D trees and Dijkstra’s algorithm that
significantly enhances the optimization of delivery
routes. Dijkstra’s algorithm is one of the most known
algorithms able to return the shortest path in a
weighted graph, making it the go to algorithm to be
used in any logistics problem. This work greatly
enhances the efficiency by integrating K-D trees to
achieve spatial indexing, as well as complex searches
and fast route calculations.
This manuscript aims to demonstrate proof of
concept that this integrated approach can improve
the efficiency of logistics. This study will evaluate
this approach's performance in real-world situations
by conducting extensive testing against conventional
optimization approaches. The end goal of the findings
is to develop a scalable and computationally efficient
approach that can allow logistics companies to
574
Sen, P., Yadav, A., Pandey, A., Shah, S. A., Bhakuni, M. S. and Ramasamy, G.
Hybrid Approach to Optimize Delivery Route with K-Dimensional Tree and Dijkstra’s Shortest Path Algorithm.
DOI: 10.5220/0013917100004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 4, pages
574-580
ISBN: 978-989-758-777-1
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

optimise their delivery routes in a manner that will
reduce their costs while improving operational
efficiency.
2 RELATED WORKS
Since then, over the past decades research has carried
on using K-Dimensional trees for spatial partitioning
and Dijkstra’s method for computing the shortest
path. In (Chowdary, K. Pranith, et al, 2023) a KNN-
KD tree algorithm was presented to improve
computational complexity and enhance the efficiency
of searching. Also, using a common location-based
application such as Google maps (Makariye, Neha,
2017) investigated K-Dimensional trees and KNN
searching methods to find out nearest cities. An
efficient KNN (k-nearest neighbor) query
mechanism was proposed handling a large number of
datasets, which was not depending on data
parallelism, and could index a new batch of data in
parallel in (Kumar, R et, al, 2017). In (Xiong, Jian, et
al, 2020) the KNN search times were additionally
optimized by embedding balanced binary trees into
K-D trees and using distance formulas that would
influence the accuracy of classification.
The conventional method to approach the
problem is with the use of Dijkstra. It was used for
pathfinding in congested areas in (Jo, Jaemin,2017)
and (Hou, Wenfeng, et al, 2018) enhanced it and
applied it to logistics transportation systems using
MapReduce to calculate the shortest paths with help
of Google Maps city distance data. The authors in
(Candra, Ade, et, al, 2020) discussed a modified
version of Dijkstra’s algorithm to solve passenger
train scheduling problem addressing the Split
Demand of One-to-One Pickup and Delivery
Problem.
Overall, the multitude of studies provide
definitive proof that KNN search algorithms and K-D
trees are practical in their utility in nearest neighbor
queries and that Dijkstra’s algorithm is worthwhile in
its optimization of shortest path queries. Similar
methodologies were performed on different domains,
such as recommendation systems, location-based
services, transportation networks and traffic
management which led to better accuracy and
improved computational efficiency.
3 BACKGROUND
3.1 K-Dimensional Tree (K-D Tree)
A K-Dimensional Tree which goes by its abbreviation
K-D Tree functions as a spatial partitioning data
structure for efficient geographical data organization
and proximity search applications within
computational geometry frameworks. The data
structure finds its primary use in multiple dimensional
search functions specifically nearest neighbor
detection and range scanning operations. A K-D Tree
possesses a binary structure which contains K-
dimensional points throughout its nodes and separates
data through multiple dimensions to produce two
partitioned regions during each tree level. The
partition structure of K-D Trees leads to improved
search efficiency which makes them beneficial in
geographic information systems and machine
learning applications and robotic systems.
3.2 K-Nearest Neighbor (KNN)
The K-Nearest Neighbor algorithm functions as a
direct non-parametric instance-based model that
applies both classification and regression purposes. A
specific input is assigned predictions through KNN
by leveraging K data points which are nearest to it and
applying either majority vote classification or
regression averaging methods. KNN requires a
distance metric among Euclidean, Manhattan or
Minkowski distance to calculate similarity. The
implementation process is straightforward yet the
calculation for large datasets becomes
computationally expensive.
3.3 Dijkstra’s Algorithm
Dijkstra’s algorithm is a foundational computer
science algorithm that is used to determine the
shortest route in a weighted graph. This optimization
scheme is applicable only in case of every edge
weight being positive to explore the best network
path. It serves as a key component behind much of
GPS routing, network processes, geographic
mapping, and city planning. As a result, it is an
indispensable tool utilized to solve both navigation
and connectivity problems in the real world.
4 METHODOLOGY
The work presented integrates K-D Trees with
Hybrid Approach to Optimize Delivery Route with K-Dimensional Tree and Dijkstra’s Shortest Path Algorithm
575
Dijkstra’s algorithm to optimize routes for delivery
networks. It targets a modification of specific
business processes to overcome computational
challenges associated with large and growing data
volumes. To prove the effectiveness of this new
model, the study looks at the geographical region of
Andhra Pradesh to illustrate its powers in the Indian
context. This methodology contains two main
components, which are a K-D Tree-based spatial
partitioning index structure and a shortest path search
using Dijkstra’s algorithm.
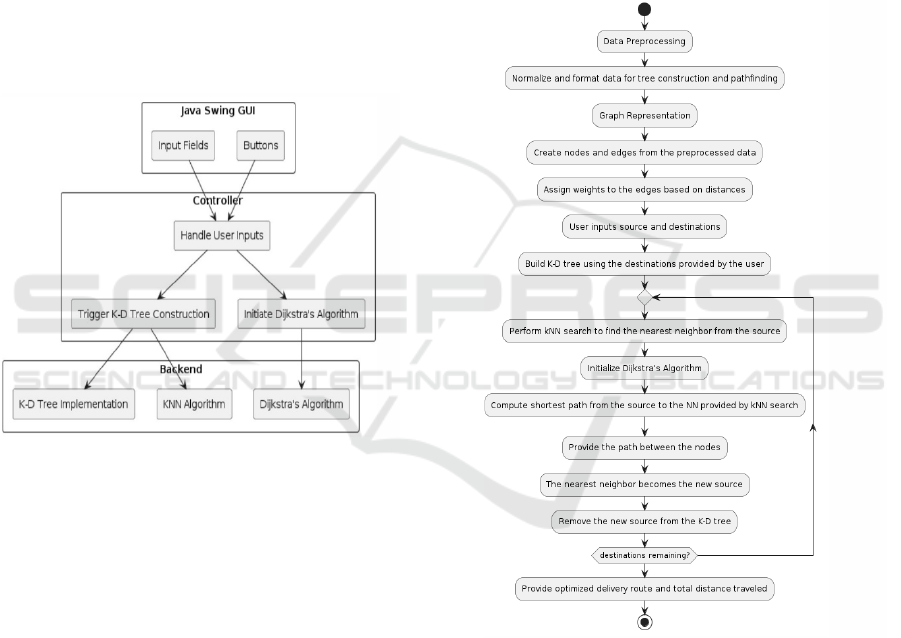
4.1 Architecture Diagram
The design of GUI uses Java Swing to create a user-
friendly interface with available user input fields.
The architectural diagram presents itself as the
Figure 1 below.
Figure 1: Architecture diagram.
4.2 Working of the Algorithm
4.2.1 Spatial Partitioning Using K-
Dimensional Tree
Step 1: Construction of the K-D tree.
The algorithm begins by prompting the user to input the
starting location along with the number of delivery
destinations and their respective names. Using this
information, a balanced K-D Tree is constructed,
organizing the delivery points efficiently in a multi-
dimensional space.
Step 2: Querying Nearest Neighbors
To optimize route selection, the k-Nearest Neighbors
(kNN) search is performed using K-D Tree. This step helps
in identifying the nearest delivery points relative to the
starting location. The Haversine formula is applied to
compute distances, ensuring accuracy in determining
proximity. This approach minimizes computational
complexity by narrowing the search area to nearby
locations.
Distance Calculation by Haversine Formula:
cos
-1
(sin(l1). sin(l2)+cos(l1)+cos(l2).cos(long2-long1)).R
where,
l1 = latitude of the first location
long1 = longitude of the first location
l2 = latitude of the second location
long2 = longitude of the second location
R = 6371 Km, radius of Earth
4.3 Workflow
The algorithm’s workflow diagram is demonstrated in
Figure 2.
Figure 2: Workflow diagram.
4.3.1 Calculation of shortest path using
Dijkstra algorithm
Step 3: Representation of Graph.
Each node within the graph contains a list that shows
neighboring nodes together with their corresponding
edge weights. This arrangement forms the basis for
creating the graph.
a. Nodes: Each node represents a junction derived
from the geographical data of Andhra Pradesh. It is
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
576

uniquely identified and contains coordinate details,
including latitude and longitude.
b. Edges: The weighted edges within the model
connect junctions through their paths and roads. Each
weight represents the distance between nodes, and it
exists between the starting and ending nodes as
designated by weighted edges. The program retrieves
distance data from Google Maps to complete the map.
Step 4: Applying Dijkstra’s’ Algorithm
Dijkstra’s’ algorithm is employed after node and edge
definition for identifying the shortest path from an
initial node to its nearest KNN-based neighbor
through the K-D tree. The algorithm performs these
steps to determine the shortest route between the
beginning node and its most proximate node
(destination).
a. A table made from a 2-D array contains m
rows connected to three columns to represent all
nodes in the graph.
b. Nodes are represented by the first column
which is initialized with the IDs of the nodes. The
distance is represented by the second column which
is set to infinity (∞) for all nodes except the starting
node, which is set to 0.
c. The procedure starts by selecting the node
with the minimum value from its second column that
becomes the current node.
d. The weights of the edges for each
neighboring node are added to the current node’s
minimum distance and compared with the existing
values in the second column. If the new sum is
smaller, the table is updated with this value in the 2nd
column and the current node in the 3rd column.
e. The current node receives a visited label
and the following node selection considers the
unvisited node showing the minimum value in the
second column. The process moves forward to step g
when either no possible node exists, or the newly
updated current node represents the destination point
or the algorithm restarts at step d.
f. The stack functions to return the shortest
path sequence. First push the destination node to the
stack followed by storing its predecessor in the third
column. The process runs until the beginning node
becomes accessible.
g. Starting from the top of the stack the nodes
get removed sequentially to establish the shortest path
between beginning and target nodes.
4.3.2 Integration of KNN and Dijkstra’s
algorithm
A K-Nearest Neighbours (kNN) search is performed
using a KD-tree to find the delivery point closest to
the starting point. Using this method creates a spatial
indexing structure that organizes geographical data,
to allow for fast retrieval of the neighbour within.
The closest neighbour is then determined, and using
Dijkstra's algorithm, a mathematical path is
calculated between the departure point to the now
closest neighbour, again, to ensure minimal distance
travelled. When the nearest node is reached, it is
removed from the KD-tree and the closest node
search is repeated (the new node is the starting
point).
This iteration process repeats the KD-tree finds
the next nearest neighbour, Dijkstra’s algorithm
calculates the shortest distance between the route
already covered and those remaining to cover, and the
nearest node gets popped until all of the delivery
points have been visited. The total distance travelled
is updated each log cycle throughout the process.
When it has visited all the locations, the algorithm
terminates, and the final optimized route along with
the complete travel distance is presented on the
graphical user interface (GUI), giving a concise
overview of the efficiency of the delivery network
4.3.3 Observation
Figure 3 illustrates the output of the proposed
algorithm. The sequence in which locations are visited
is denoted by numerical labels in red, while the
corresponding path is represented using black lines
connecting the edges as shown in figure 3.
Figure 3: Final output.
Hybrid Approach to Optimize Delivery Route with K-Dimensional Tree and Dijkstra’s Shortest Path Algorithm
577
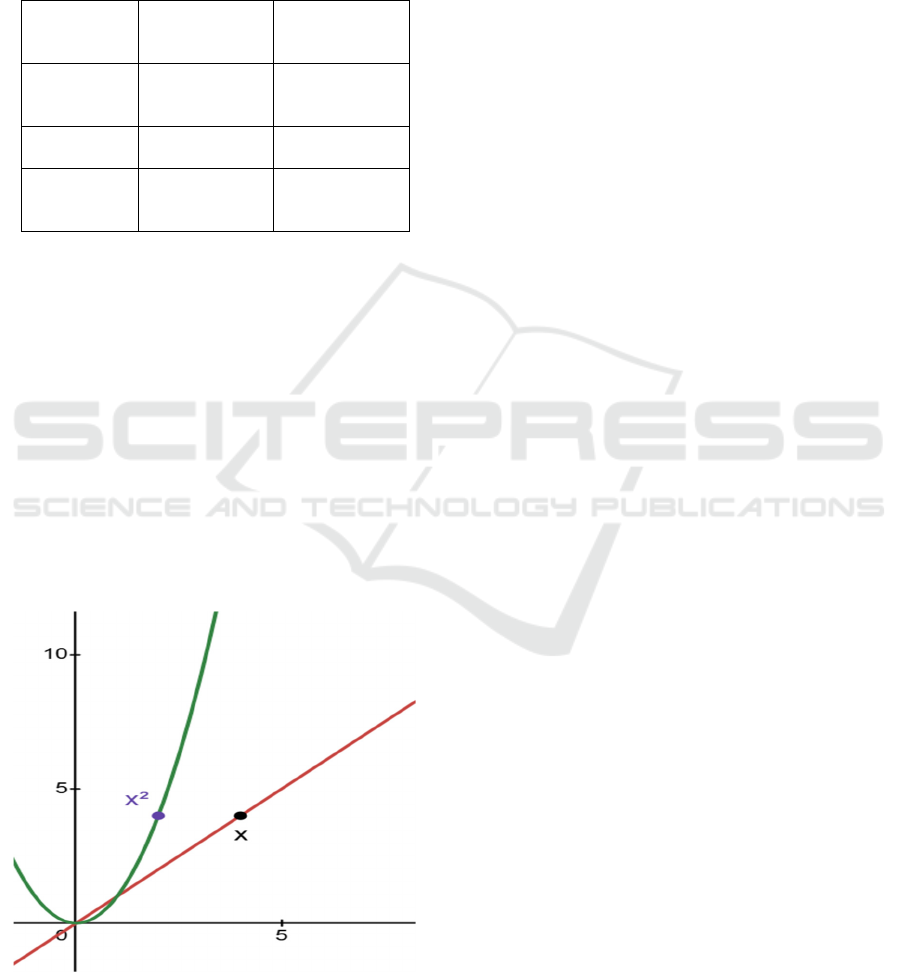
Table 1 presents a comparison between the
expected nearest neighboring locations and the actual
locations visited, based on the results illustrated in
Figure 3. The data in Table 1 demonstrates that the
algorithm proposed operates effectively, as expected
and visiting locations align consistently.
Table 1: Expected vs actual output.
S.No.
Expected
Locations
Actual
Locations
Visite
d
1
Kastubha
Gandhi Girl’s
Hostel
(
23
)
Kastubha
Gandhi Girl’s
Hostel
(
23
)
2
Duddukanta
(
20
)
Duddukanta
(
20
)
3
Jagan Reddy
Balapanuru AP
(
27
)
Jagan Reddy
Balapanuru AP
(
27
)
5 TIME COMPLEXITY
For Nearest Neighbors problem we have two core
approaches which are K-Nearest Neighbors (KNN)
method and Dijkstra’s algorithm. Both of them find
the nearest points in data sets but their time
complexities measure different computational
efficiencies. KNN algorithm is very efficient having
the time complexity of O (kn log n + k log k), which
means the number of operations needed to be
performed are reasonably high with respect to the
number of delivery locations (k) and dataset nodes
(n).
Figure 4: Analysis of time complexity.
In Roughly, this means Dijkstra's algorithm and
KNN have time complexities of O (k² n log n) Y O
(n²), and we can see that for small k KNN is way
faster than Dijkstra's algorithm, while for a huge
value of k, the computation KNN will still take much
more time than Dijkstra's algorithm. This differential
becomes sharper with a larger ‘k’ and suggests an
underrepresented advantage of KNN vs. other well-
studied routing problems.
Overall, figure 4 gives a graphical aspect of time
complexity growth for the two approaches.
6 RESULTS AND ANALYSIS
An assessment of the chosen routes validated the
efficiency of the proposed41[44] route optimization
system. Significant reduction in total travel distance
was recorded when compared with conventional
benchmark methods, thereby realizing time and cost
benefits for logistics carriers as well as shippers. The
use of K-D trees allowed for efficient realization of
optimal paths while Dijkstra’s algorithm was utilized
to ensure shortest route viable to rep multiple
destinations. This reduced diversions while
improving supply planning, leading to more efficient
deliveries.
Comparative analysis emphasized the system’s
role in lowering computational complexity and
processing time especially for cases where the
number of delivery points increased. Large datasets
were still the domain of computer/memory
management nightmares, but K-D trees and
Dijkstra’s algorithm allowed for efficient (relatively
speaking, of course) spatial data organization and
super speedy single-source shortest path discovery.
This design kept the functions separate and thus
reduced system overload, allowing for larger datasets
and elaborate routing plans.
That being said, heuristic-based optimizations
could potentially result in negligible augmentations
of travel distance as a byproduct of their
characteristics. Even so, the main benefit is the
substantial decrease in employment costs. Real-time
updates are crucial in large-scale logistics operations,
where delays can create congestion and cost money.
It is proposed as an energy-efficient system
addressing routing and computational issues and is
therefore a relevant solution for accelerating the
delivery network of businesses and enabling them to
remain competitive on the market.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
578

7 CONCLUSION AND FUTURE
IMPROVEMENTS
Overall, it was evident that K-D trees and Dijkstra’s
algorithm worked well together to improve delivery
route optimization, as you can see this kind of power
from combining data structures and algorithms in this
way. Traditionally applied for organizing multi-
dimensional spatial data for fast nearest-neighbour
searches, K-D trees helped pinpoint the best possible
delivery points. Leveraging Dijkstra’s algorithm for
shortest path determination based on weighted
graph1, the system devised an efficient, cost-
effective routing solution. This integration
immensely simplified the computational intensity
involved, making it possible for the system to adapt
in real-time and make quick decisions regarding
logistics.
In summary, the work presented here lays the
groundwork for further research and innovation in
delivery route optimization. In the case of the
potential application of Unmanned Aerial Systems
(UAS) for parallel drone deliveries, because all
queries do not require tree construction, K-D trees
enables the rapid computation of multi-point
delivery routes. It also improves safety and
operational efficiency of drone-based logistics and
provides flexibility which allows for real-time
adaptation to varying conditions and new delivery
requests, optimizing the overall system performance.
Although it is as accurate as they come, the
system’s wide-reaching nature offers up
opportunities for further improvement. Dynamic
processing of new requests while service delivery
operations are in progress could make route planning
a seamless process without disruption to serve new
operations at all times. New requests to the model
would regenerate K-D trees, using efficient
architecture and eliminating unnecessary data,
enabling real-time route optimization and optimizing
responsiveness to customers demands for better
service quality. This will empower logistics strategies
from cold chain toward delivery ops, and there is a
demand for further research and implementing the
system in daily practice.
REFERENCES
Andini, Diska, et al. "Adaptation of k-nearest neighbor
queries for inter-building environment." Computational
Science and Its Applications–ICCSA 2018: 18th
International Conference, Melbourne, VIC, Australia,
July 2-5, 2018, Proceedings, Part I 18. Springer
International Publishing, 2018.
Candra, Ade, Mohammad Andri Budiman, and Kevin
Hartanto. "Dijkstra’s and a-star in finding the shortest
path: a tutorial." 2020 International Conference on Data
Science, Artificial Intelligence, and Business Analytics
(DATABIA). IEEE, 2020.
Chowdary, K. Pranith, et al. "Exploring KD Trees and KNN
Search in the context of Google Maps: An Insightful
Overview." 2023 14th International Conference on
Computing Communication and Networking
Technologies (ICCCNT). IEEE, 2023.
Chung, Moonyoung, Soon J. Hyun, and Woong-Kee Loh.
"Efficient exact k-flexible aggregate nearest neighbor
search in road networks using the M-tree." The Journal
of Supercomputing 78.14 (2022)
D. S. Nair and P. Supriya, "Comparison of Temporal
Difference Learning Algorithm and Dijkstra’s
Algorithm for Robotic Path Planning," 2018 Second
International Conference on Intelligent Computing and
Control Systems (ICICCS), Madurai, India, 2018, pp.
1619-1624, doi: 10.1109/ICCONS.2018.8663020.
Deepa, G., et al. "Dijkstra Algorithm Application: Shortest
Distance between Buildings." International Journal of
Engineering and Technology 7.4.10 (2018): 974-976.
Gayathri, N., and KRM Vijaya Chandrakala. "A novel
technique for optimal vehicle routing." 2014
International Conference on Electronics and
Communication Systems (ICECS). IEEE, 2014
Hou, Wenfeng, et al. "An advanced k nearest neighbor
classification algorithm based on KD-tree." 2018 IEEE
International Conference of Safety Produce
Informatization (IICSPI). IEEE, 2018.
Jayasree, K. R., P. R. Jayasree, and A. Vivek. "Dynamic
target tracking using a four wheeled mobile robot with
optimal path planning technique." 2017 International
Conference on Circuit, Power and Computing
Technologies (ICCPCT). IEEE, 2017.
Jiang, Wei, et al. "Graph-Indexed k NN Query
Optimization on Road Network." Electronics 12.21
(2023): 4536.
Jo, Jaemin, Jinwook Seo, and Jean-Daniel Fekete. "A
progressive kd tree for approximate k-nearest
neighbors." 2017 IEEE Workshop on Data Systems for
Interactive Analysis (DSIA). IEEE, 2017.
Kaniz, Sharifa Tahmida, Jibon Naher, and Tanzima
Hashem. "Authentication of k nearest neighbor queries
in the presence of obstacles." 2017 4th International
Conference on Networking, Systems and Security
(NSysS). IEEE, 2017.
Kumar, R. Sathish, C. Rani, and P. Ganesh Kumar.
"Predicting shortest path for goods delivery to fair price
shops in India." 2017 4th International Conference on
Advanced Computing and Communication Systems
(ICACCS). IEEE, 2017.
Makariye, Neha. "Towards shortest path computation using
Dijkstra algorithm." 2017 International Conference on
IoT and Application (ICIOT). IEEE, 2017.
Sari, Indah Purnama, et al. "Implementation of Dijkstra’s
Algorithm to Determine the Shortest Route in a City."
Hybrid Approach to Optimize Delivery Route with K-Dimensional Tree and Dijkstra’s Shortest Path Algorithm
579

Journal of Computer Science, Information Technology
andTelecommunicationEngineering2.1(2021):134138.
Srinivasan, Madhura, and K. Sireesha. "Optimal Path
Finding Algorithm for Logistic Routing Problem."
2022 International Conference on Intelligent
Innovations in Engineering and Technology (ICIIET).
IEEE, 2022.
Tiwari, Vijay R. "Developments in KD Tree and KNN
Searches." International Journal of Computer
Applications 975: 8887.
Xiong, Jian, et al. "Split demand one-to-one pickup and
delivery problems with the shortest-path transport
along real-life paths." IEEE Access 8 (2020): 150539-
150554.
Zhu, Dan-Dan, and Jun-Qing Sun. "A new algorithm based
on Dijkstra for vehicle path planning considering
intersection attribute." IEEE Access 9 (2021): 19761-
19775.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
580
