
Inspection of Materials Dimensions Using Webcam in the Conveyor
System
Krishna Kumar M., Siddharth N., Soundara Rajan V. and Venkatachalam G.
Department of Mechanical Engineering, K.S. Rangasamy College of Technology, Tiruchengode, Tamil Nadu, India
Keywords: Material Detection, Dimension Measurement, Conveyor System, Machine Learning, Embedded Systems.
Abstract: Measuring material dimensions in real time is a crucial component of the technological industry revolution.
In industrial applications, the ability to discern material and its dimensions from pictures and videos may be
highly valuable. Conveyor systems are used to transfer most materials in industries. In a conveyor system,
material identification and dimensioning is a particularly challenging task. Every day, scientists and engineers
put a lot of effort into developing machine learning and deep learning algorithms that will enable robots to
comprehend and learn, outperforming humans at tasks. The machine learning model used to detection of
material and its dimension from the pictures. The raspberry pi and pi camera used to capture the high-quality
picture of the material on the conveyor system. The machine learning model build with help of python
programming language. The material image taken from the conveyor system using webcam and processed
through the image processing library like OpenCV and TensorFlow. The embedded system techniques and
machine learning approaches are playing important role in this concept. The existing techniques for detecting
materials and their dimensions in a variety of industrial applications are the main topic of this review article.
The techniques and their achievements are compared.
1 INTRODUCTION
Conventional materials science research mostly relies
on the expertise of lone specialists. Developing new
scientific theories and expanding our understanding
of the physical world are two areas in which expert
knowledge is extremely valuable. But when it comes
to forecast efficiency and accuracy, the conventional
expert knowledge technique is obviously limited.
Technological advancement frequently necessitates
the development of new materials with certain
qualities, yet it might take a long study cycle to learn
enough about a single material system. Data volume,
speed, and complexity are all rising as a result of
improvements in experimental and computational
techniques. Xiaoting Zhong, et al, 2022 However, a
human expert can only analyse so much data at once.
In order to create better materials more quickly, new
research instruments are required.
As the title states itself the method is used to
measure the real time dimension of a material in the
conveyor system for industrial application. It is a very
hot and trending topic in the field of computer
science.the importance of object detection and
tracking for material dimensions is increasing in
various industrial and autonomous mobile system
applications. The widespread applications of machine
learning and computer vision have significantly
impacted research. Currently, most standalone
systems come equipped with vision sensors or
cameras. As a result, mobile device localization and
navigation depend on knowing the size and distance
of objects in the immediate environment. Gokulnath
Anand and Ashok Kumar Kumawat, 2021 Currently,
machine vision applications find extensive utilization
across various domains, including robotics, conveyor
belt speed measurement, displacement systems, and
fish length measuring.
Lan Fu, et al, 2022 Convolutional neural networks
(CNNs)-based deep learning has recently greatly
improved object-detection accuracy in photos saved
in the.jpg, .jpeg, and.png formats. Many attempts
have been made to apply this achievement to photos
from the field of materials science by utilizing CNNs
to identify the material's dimension in the image.
Thus, using machine learning approaches, this
study examines material dimension inspection
methods for industrial manufacturing. It goes over
how to take a material picture using an embedded
system application. The theoretical foundation of
234
M., K. K., N., S., V., S. R. and G., V.
Inspection of Materials Dimensions Using Webcam in the Conveyor System.
DOI: 10.5220/0013911100004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 4, pages
234-241
ISBN: 978-989-758-777-1
Proceedings Copyright © 2026 by SCITEPRESS – Science and Technology Publications, Lda.

machine learning for material dimension
identification is briefly described in section 2. The
section 3 introduces a comprehensive examination of
both machine learning and deep learning models used
for the identification of materials and their
dimensions. In Section 4, the outcomes of diverse
both machine learning and deep learning models are
juxtaposed, utilizing operational parameters. The
study concludes in Section 5, followed by an
exploration of prospects.
2 MATERIAL DIMENSION
INSPECTION
2.1 Material Inspection and Detection
Based on Raspberry Pi and
Machine Learning Algorithm
Talha Bayrak et al., (2021) established TensorFlow,
OpenCV, and Brachio Graph libraries in combination
with a hardware-created drawing machine to
recognize and draw objects. We accomplished this by
using image processing to distinguish things and
sketching them in the Raspberry Pi environment.
Using the TensorFlow and OpenCV libraries, the
software component recognized objects. The
processed pictures were vectorized using the Brachio
Graph library, and servo motor drawing experiments
were carried out. The servo motor type and tuning
changes were determined to be significant. The
Brachio Graph library's calibration parameters can be
fine-tuned for best results. During the test phase of
this investigation, the objects were effectively
identified, and drawings of the things were created
using servos.
Gokulnath Anand and Ashok Kumar
Kumawat., (2021) designed an object detection and
tracking system utilizing the Raspberry Pi camera for
digital imagery in both computer and robot vision
applications. The system comprises the Raspbian
operating system, Python, and the OpenCV platform,
all integrated to capture images through the Pi
camera. This project addresses a burgeoning research
area aiming to develop techniques assisting
computers in acquiring and understanding
information from digital images, encompassing
movies and photographs. Specifically, the system
employs object detection, a computer vision approach
enabling the identification and pinpointing of objects
in both images and videos. The implementation
utilizes an efficient shape-based object detection
method, achieving real-time displacement through
the OpenCV programming library, Designed
specifically for computer vision applications, the
Raspberry Pi comes equipped with a camera module.
Varun Sai et al., (2023) Deep learning has
dramatically improved the speed and accuracy of
object identification algorithms. DL allowed for very
accurate real-time object identification in current
desktop PCs, as well as object detection utilizing the
Raspberry Pi 3. Real-time object identification
necessitates a significant amount of computing
power, and reaching real-time speed is challenging in
a system with restricted capability. Detecting things
may be accomplished using a variety of techniques.
Two methodologies were employed on the Raspberry
Pi 3 B to assess their compatibility with limited
hardware capabilities. The suitability of a deployed
target detector hinges on achieving a sufficiently high
resolution and frame rate for practical use in real-
world applications. This approach involves
evaluating parameters such as frame rate, accuracy,
and response time.
Siddharth et al., (2018) Utilizing OpenCV, we
amalgamated various components to formulate a
program centered on Raspberry Pi for object
recognition and tracking. The program encompasses
two primary functionalities: Monitoring and
identifying objects. The outcome of this endeavor is
a Python software designed for Windows that is adept
at identifying and tracking objects through the
analysis of Values for Hue, Saturation, and Intensity
(HSV) extracted from frames captured by the
Raspberry Pi camera module.
Muhammad Sabih et al., (2023) optimal settings
have been determined through the analysis of material
flow rates on a conveyor belt, ensuring the automated
preservation of the desired raw material ratio. A sight
sensor strategically placed on the conveyor belt
accurately gauges the rate at which raw materials
flow. The identified area of interest is further refined
through a voting-based segmentation method,
isolating the region exhibiting the highest level of
confidence. Machine learning algorithms, leveraging
moment and contour information, are then employed
to predict flow rates across multiple trials. A
comprehensive evaluation of various techniques
yields compelling results, with the Bagging regressor
employed with optimal parameters on the final data
split.
Mohd Shuhanaz et al., (2023) Suggested GPR
data analysis using a machine learning system to
reduce labor. In the process for identifying material
dimensions, A structured approach is presented for
categorizing the dimensions of subterranean metallic
pipes. This methodology incorporates the utilization
Inspection of Materials Dimensions Using Webcam in the Conveyor System
235
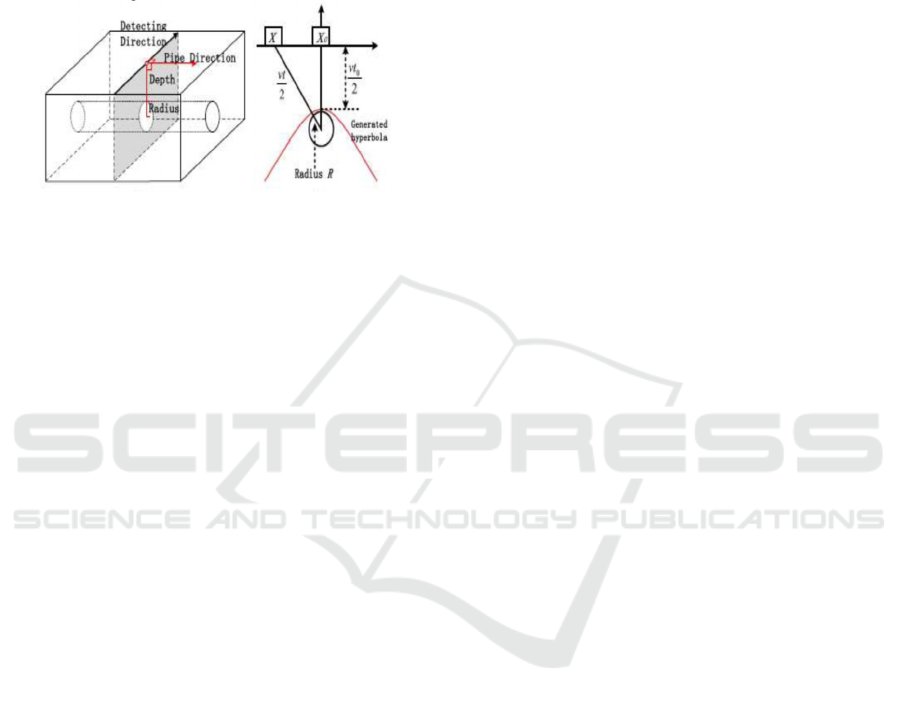
of Histogram of Oriented Gradient (HOG) as a
feature extraction method. The investigation
encompasses the examination and creation of a back
propagation neural network and Support Vector
Machine (SVM) for the purpose of classifying
underground metallic pipes, yielding a notable
accuracy rate of 98%. The figure 1 shows Directions
of GPR scanning.
Figure 1: Directions of GPR scanning.
Xiaoting Zhong Et Al., (2021) Because of their
high accuracy, machine learning models are rapidly
being applied in materials research. The most precise
machine learning models, on the other hand, are
typically difficult to describe. Solutions to this
difficulty can be found in explainable artificial
intelligence (XAI). The interpretability of complex
machine learning models, such as deep neural
networks (DNNs), within the realm of materials
science. The objective is to furnish materials
scientists with a comprehensive introduction to
Explainable Artificial Intelligence (XAI). The paper
elucidates relevant concepts within the materials
science context, aiming to clarify the nature of
explanations in this field. Examples are used to show
how XAI may help with materials science research.
Lan Fu et al., (2022) deep neural networks and
deep learning have demonstrated significant success
in a wide range of signal and image processing
applications. This is particularly evident in situations
where extensive annotated training data is needed,
such as in supervised learning scenarios.While there
is theoretical potential for leveraging deep-learning
algorithms to enhance the processing of microscopic
images capturing crucial microstructures in diverse
material samples, Considering specific priors and
requirements in materials science is crucial for
maximizing performance improvements.It focuses on
the critical issue of recognizing items of interest in
microscopic materials-science photographs. To
address this issue, we also provide several ways for
incorporating multiple priors, such as object form,
symmetry, and 3D consistency, with deep learning.
Jan-Lucas Uslu et al., (2023) the devised
detection method relies on a fusion of optical contrast
between flakes and the substrate, along with their
geometric characteristics. Our results showcase its
capability to identify a significant portion of flakes
with exfoliation across different materials, achieving
an average recall (AR50) ranging from 67% to 89%.
Moreover, with as little as five flakes, an algorithm of
this kind may be taught efficiently. of a particular
material, as exemplified in the case of few-layer
graphene. WSe2, MoSe2, CrI3, 1T-TaS2, and
hexagonal BN. Over the course of two years, our
technique was assessed, and over 30 different
researchers took over 106 photographs of diverse
materials.
Sarvesh Sundaram and Abe Zeid., (2023)
Quality inspection is one of the important stages that
determines if a product is acceptable or not.
Numerous factors influencethe examination of visual
elements, leading to whole industry precision of the
inspection approximately 80%. Achieving 100%
inspection with cutting-edge production processes
through Inspecting visuals manually is both time-
consuming and costly. Despite the assistance of
computer vision (CV) techniques in automating
certain aspects of the visual inspection process,
challenges persist. They are applying Artificial
Intelligence (AI) based on Deep Learning (DL) to the
visual evaluation process. On image data of casting
goods, the recommended model boasts an inspection
precision of 99.86%.
Xiaoquan Shi et al., (2023) five models for
predicting filament dimensions were developed using
decision trees, support vector regression, back
propagation neural networks, random forests, and K-
nearest neighbors. The back propagation neural
network exhibited coefficients of determination of
0.9025 for line width and 0.9604 for line height.
Notably, the parameters with the greatest influence on
line width and height, in descending order, were
nozzle diameter, height, printing speed, and extrusion
pressure. The study revealed that stretched material
resulted in a thinner filament, and the regularity of
processing parameters on geometric size was found to
be poor. Conversely, material compression had a
significant impact on dimensions, with nozzle
diameter playing a crucial role. Consequently, these
research findings have the potential to be utilized for
estimating Determining the dimensions of printing
filament structures guides the selection of printing
parameters and establishes the size of individual
layers in 3D printing.
Nijdam et al., (2022) Various factors, such as
Extrusion force, print velocity, nozzle size, nozzle
elevation, and print temperature are key parameters in
3D printing. A crucial role in determining the success
of the extrusion process and the dimensions of the
extruded filament. Different viscosities demonstrate
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
236

specific 'printability windows' during printing.
Achieving uniform and consistent extrusion requires
the precise adjustment of printing parameters.
Furthermore, the dimensions of the extruded
filament, both in terms of width and height, can vary
significantly depending on the process conditions.
Effectively predicting the geometric characteristics of
the printed line arrangement is essential for
optimizing 3D model slicing and enhancing the
overall efficiency of 3D structure manufacturing.
Madhavi Karanam et al., (2023) The real-time
application of the system in identifying objects and
instantly providing their dimensions upon request.
Object dimension measurement and detection
represent crucial aspects of computer vision, playing
a vital role in automating various human operations.
Humans can recognize and locate items in photos and
movies, but computers do not have that capacity
without prior training. Machine learning, computer
vision, and object identification methods must be
used to educate the computer. This project
demonstrates how to identify and measure the
dimensions of an item in real time using a camera. We
used the OpenCV and NumPy libraries to
approximation the object's size in real time. Computer
vision assists computers in seeing and
comprehending. Computer vision assists computers
in interpreting a 3D environment from a 2D picture
and educates computers to do various activities. It
also aids in Human Computer Interaction by
distinguishing items from their surroundings and
providing us with important information.
Chandan et al., (2018) various methodologies for
object detection encompass Region-based
Convolutional Neural Networks (RCNN), Faster
RCNN, Single Shot Detectors (SSD), and You Only
Look Once (YOLO) are all different approaches to
object detection in computer vision. When
prioritizing speed over accuracy, Faster-RCNN and
SSD exhibit superior accuracy, with YOLO
demonstrating even better performance. Achieving an
optimal balance between identification accuracy and
real-time processing, a combination of SSD and
MobileNets in deep learning facilitates effective
object recognition and tracking, ensuring both
efficiency and speed.
Wang et al., (2020) the latest developments in
object detection, this study explores advancements in
the field, Incorporating Faster R-CNN, YOLO, SSD,
and RetinaNet into the discussion. Additionally, it
explores different datasets used in object detection
and the evaluation metrics employed to gauge the
effectiveness of object detection algorithms.
Manjula et al., (2016) investigated object
detection and suggested a method for detecting and
classifying things that used image processing
methods with machine learning algorithms. Various
ways are investigated in this, and the accuracy of the
methods is calculated. On a bespoke dataset, the final
recommended approach attained an accuracy of
87.5%.
Binay et al., (2017) The methods for object
identification The research evaluated the precision,
efficiency, and computational intricacy of different
techniques, incorporating Haar cascades, Histogram
of Oriented Gradients (HOG), as well as advanced
deep learning models like YOLO, Faster R-CNN, and
SSD.
Sredha Vinod et al., (2022) to locate missing
bolts, an automated ESP32 camera is used to inspect
the integrity of bolted steel components. Earlier study
concentrated on improving bolt tightening quality.
Insufficiently securing steel components through
improper bolting can significantly compromise their
mechanical strength, leading to potential structural
failure. This investigation employed a methodology
involving real-time photography of steel members
using an ESP32 camera module. The captured video
footage underwent processing in Visual Studio,
employing the C++ language. Another aspect of the
study incorporated a Faster Region-Based
Convolutional Neural Network (Faster R-CNN), a
swift and efficient approach. This neural network
utilized an image dataset for training, facilitating the
extraction of crucial elementssuch as bolts and
holesin the steel components' areas of interest. The
trained model demonstrated the ability to identify
bolts and holes accurately. The study's findings
indicated the reliability of the developed system,
which is capable of promptly alerting users to any
missing bolts. Leveraging TensorFlow for object
identification, the Faster R-CNN algorithm achieved
an impressive 95% accuracy, contributing to
enhanced efficiency in quality monitoring processes.
Pranjal et al., (2020) For pothole identification,
the Deep Learning-based algorithm YOLO is used.
For pothole dimension estimate, an image processing-
based triangle similarity measure is applied. The
suggested approach gives relatively accurate pothole
identification and dimension estimate results. The
suggested approach also reduces the amount of time
necessary for road maintenance. The approach
utilizes a specially curated dataset comprising images
depicting both waterlogged and dry potholes in
diverse shapes and sizes.
Inspection of Materials Dimensions Using Webcam in the Conveyor System
237

2.2 Material Dimensions Inspection
Based on PLC and Embedded
Nadin et al., (2023) In order to increase accuracy and
efficiency, an integrated logic controller (PLC) was
installed, which provided real-time monitoring and
control of the material transfer plan of activities. Data
and samples from industrial facilities were utilized to
validate the success of this viewpoint. The observed
outcomes reveal a significant advancement in
material transfer operations, including a significant
reduction in transfer amount times and a significant
improvement in precision. The two large values
reflect a 30% reduction in transfer time and a 15%
drop-in mistake rate. The analysis of these data
demonstrates the importance of PLCs in simplifying
material transport as well as their future application
possibilities. PLC-based solutions facilitate industrial
material transfer and provide additional opportunities
to increase productivity and effectiveness.
Manoj and Uday., (2017) A dissertation on
conveyor systems is in progress to develop a tabletop
model featuring a Configurable quantity of stations
and an accompanying control board. The suggested
conveyor has a length of 780mm and is capable of
transferring items as large as 60 cubic mm. The
configuration of stations, whether with or without
interlocks, can be adjusted within the range of 2 to
5The conveyor system relies on PLC technology,
smoothly integrating with the palletizer. The PLC
exhibits robust programming features, including
timers, counters, and customizable variable inputs,
ensuring efficient operation serve as the fundamental
operational elements that effectively minimize input
and output requirements for the PLC.
Borkowski and Knop., (2016) The evaluation
process involves inspection plans delineating the
different production areas necessitating scrutiny. The
initial phase typically involves the examination
Incoming or receiving inspection was another term
used for the assessment of raw materials. Subsequent
inspections occur at regular intervals following
various stages of production, with the specific nature
of these assessments varying across industries. The
inspection procedures for structural steel products
vary considerably compared to those for
microcontrollers. Upon reachingat the conclusion of
the assembly line, a thorough inspection is carried out
to determine whether the product meets the required
standards for acceptance or if it should be rejected.
Mirroring the concept of inbound inspection. In
certain instances, the incoming inspection may also
extend to the scrutiny of packaged products during
the shipping process.
Xiaofei Zhang et al., (2019) when subjected to
ultrasound activation, ultrasonic thermography (UT)
emerges as an innovative non-destructive testing
technique that captures damage through thermal
imaging conducted by an infrared (IR) camera.
However, noise and indistinct borders surrounding
high-temperature locations in the UT test thermal
pictures may confound and lead to inaccurate
findings. As a result, the debate is built on extensive
CFRP content learning. This UT employs low-power
ultrasonic excitation. The high-dimensional nature of
infrared image sequences is represented through data
set modeling. Manifold learning is then employed to
discern the intrinsic structure within the two-
dimensional manifold of these data sets. The steady
component detects VID and BVID (barely visible
impact damage) by displaying the temperature
increase caused by damage. The research
configuration was constructed, and tests were
conducted on CFRP plate samples exhibiting diverse
degrees of impact damage. In a low-noise
reconstructed static image, all impact damage may be
identified and presented.
Sambathkumar et al., (2014) to measure the
components, plug gauges are frequently employed.
An automated system with pneumatic comparators is
used instead of manual inspection. Because the
manual examination could be more efficient, this
measurement instrument requires improvement. The
dimensions of this gadget are computed using a
comparator setup. The Geneva conveyor transports
the components from one location to another. It is
vital to reduce the number of staff involved. We
created a conveyor with a Geneva drive that may be
used in industries. Consequently, a conveyor system
is employed to transfer materials between different
areas, with the specimen's size determined by its
dimensions.
Dinesh et al., (2019) Sensors are employed to
gauge the material dimensions, with the signal then
transmitted to the control unit. Subsequently, the
control device sends this is a suitable signal to engage
the pneumatic cylinder. The pneumatic cylinder
collects items that are the incorrect size. In today's
engineering firms, the inspection conveyor is critical
for material handling. Conveyors transport objects
from one point to another. Sensors are used to
measure the dimensions at the top of the conveyor.
This procedure ensures that the belts are transported
to their destinations on schedule. The figure 2 shows
Material detection robot.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
238

Figure 2: Material detection robot.
3 RESULT AND DISCUSSION
Inspecting material dimensions is achieved through
the utilization of a Raspberry Pi and OpenCV
platform. Object detection is implemented using
either machine learning or deep learning algorithms
to ensure accurate prediction and identification of
detected objects, along with displaying their
respective names, as illustrated in Figure 3.
We may check the casting goods using the SQI
shop floor application. We inspect a faulty and an
able product to illustrate the application's
functionality. The goods are examined with the literal
click of a button. The operator can record through the
inspection procedure by going into relevant details
pertaining items, equipment, etc., as depicted in
Figure 4.
We measured several things and compared them
to their real dimensions, then computed the
percentage error to determine the measurement's
accuracy which shown in table 1 and figure 5
Figure 3: Object detection using the machine learning and
OpenCV.
Figure 4: (a) Examination of a faulty product and (b)
evaluation of an approved product.
Figure 5: Detection of Material Dimensions.
Table 1: Evaluation of Material Dimensions Across Different Objects.
Object
Original
Length
(mm)
Original
Breadth (mm)
Original
Area (mm²)
Predicted
Length
(mm)
Predicted
Breadth (mm)
Predicted Area
(mm²)
Accuracy (%)
Mobile 155 72 11,160 153.29 70.29 10,774.47 96.54
Pen 120 13 1,560 119.10 13.09 1,559.19 99.95
Book 275 164 45,100 276.01 163.50 45,127.63 99.94
Box 302 305 92,110 294.50 310.10 91,324.45 99.14
Wallet 91 73 6,643 92.74 74.69 6,926.50 99.72
Pencil
b
ox
140 45 6,300 141.10 45.00 6,349.50 99.21
Adapter 34 47 1,598 34.99 48.46 1,695.51 93.89
Inspection of Materials Dimensions Using Webcam in the Conveyor System
239

4 CONCLUSIONS
This work presents a real-time approach for item
detection and dimension assessment. The various
hardware parts and how they are put together are
explained in detail. For material dimension
inspection, a simple, low-cost approach utilizing
machine learning and a deep learning model is
described. The performance of many machine
learning algorithms is examined and contrasted with
their corresponding Python codes. The material was
photographed using a Raspberry Pi and a Pi camera.
Because it doesn't require a separate working
platform like a personal computer, it is a complex
approach. For the majority of computers and robot
vision systems, the capacity to inspect material and its
dimensions is crucial. In terms of open-world
learning, human-level performance is still a long way
off. It should be highlighted that although this
material and its dimensions might be very helpful,
they have not been employed extensively in many
sectors. Since mobile robots and other autonomous
machines are becoming increasingly often used.
REFERENCES
Borkowski, S.; Knop, K. “Challenges Faced in Modern
Quality Inspection”, Management and Production
Engineering Review, Vol. 7, No. 3, pp. 11–22 2016.
G. Chandan, Mohana and A. Jain, Real-Time Object
Detection and Tracking by Using OpenCV and Deep
Learning, ICIRCA, (2018).
Gokulnath Anand and Ashok Kumar Kumawat, “Object
detection and position tracking in real time using
Raspberry Pi”, Materials Today: Proceedings, 2021.
Jan-Lucas Uslu, TaoufiqOuaj, David Tebbe, Alexey
Nekrasov, Jo Henri Bertram, Marc Schutte, Kenji
Watanabe, Takashi Taniguchi,4 Bernd Beschoten, Lutz
Waldecker and Christoph Stampfer, “An open-source
robust machine learning platform for real-time
detection and classification of 2D material flakes”,
2023.
Lan Fu, Hongkai Yu, Xiaoguang Li, Craig P. Przybyla, and
Song Wang, “Deep Learning for Object Detection in
Materials-Science Images”, Signal Processing for
Advanced Materials, 2022.
Madhavi Karanam, Varun Kumar Kamani, Vikas Kuchana,
Gopal Krishna Reddy, Koppula, and Gautham
Gongada, “Object and it’s dimension detection in real
time”, E3S Web of Conferences, Vol. 391, No. 01016,
2023.
Manoj M. Nehete and Uday C. Patil, “Design and
Fabrication of PLC Based Conveyor System with
programmable Station”, International Journal of
Analytical, Experimental and Finite Element Analysis
(IJAEFEA), Issue. 3, Vol. 4, pp 53-58, 2017.
Mohd ShuhanazZanar Azalan, Tang Esian, Hasimah Ali,
Ahmad Firdaus Ahmad Zaidi and Tengku Sarah
Tengku Amran, “Classification Size of Underground
Object from Ground Penetrating Radar Image using
Machine Learning Technique”, Journal of Physics, Vol.
2550, 2023.
Mr. N. Dinesh, Mr. D. Muthamilselvan, Mr. A.
Sakthibalasundar, Mr. P. Sankaravignesh, “Fabrication
of Material Inspection Robot”, International Journal of
Engineering Research & Technology (IJERT), Vol. 7,
Issue. 06, 2019.
Muhammad Sabih, Muhammad Shahid Farid, Mahnoor
Ejaz, Muhammad Husam, Muhammad Hassan Khan
and Umar Farooq, “Raw Material Flow Rate
Measurement on Belt Conveyor System Using Visual
Data”, Applied science innovation, Vol. 6, No. 88,
2023.
N. Sambathkumar, K. Sivakumar, D. Ganesan, M.
Krishnakumar, H. Mohamad Ibrahim, “Design and
Fabrication of Material Inspection Conveyer”,
International Journal of Research in Aeronautical and
Mechanical Engineering, Vol.2 Issue.3, pp. 129-134,
2014.
Nadin E S, Madhaneesh A, Sathiesh G V, and Arun
Jayakar, “PLC Based Material Transfer Operation in
Industrial Applications”, International Journal of
Creative Research Thoughts (IJCRT), Vol. 11, Issue.
10, 2023.
Nijdam, J.J, Agarwal, D, Schon, B.S, “An experimental
assessment of filament-extrusion models used in slicer
software for 3D food-printing applications”, Journal of
Food Engineering, Vol. 317, No. 110711, 2022.
Pranjal A. Chitale, Hrishikesh R. Shenai, Jay P. Gala,
Kaustubh Y. Kekre and Ruhina Karani, “Pothole
Detection and Dimension Estimation System using
Deep Learning (YOLO) and Image Processing”, IEEE,
2020.
S. Manjula, Dr. K. Lakshmi, “A study on object detection”,
IJPTFI, ISSN: 0975-766X, 2016.
Sarvesh Sundaram and Abe Zeid, “Artificial Intelligence-
Based Smart Quality Inspection for Manufacturing”,
Micromachines, Vol. 14, No. 570, 2023.
Siddharth Mandgi, Shubham Ghatge, Mangesh Khairnar,
Kunal Gurnani and Prof. Amit Hatekar, “Object
Detection and Tracking Using Image Processing”,
Journal of Engineering Research and Application, Vol.
8, Issue 2, pp.39-41, 2018.
Sredha Vinod, Pshtiwan Shakor, Farid Sartipi and Moses
Karakouzian, “Object Detection Using ESP32 Cameras
for Quality Control of Steel Components in
Manufacturing Structures”, Arabian Journal for
Science and Engineering, 2022.
T. Varun Sai, B. Aditya, A. Mahendra Reddy and Dr. Y.
Srinivasulu, “Real Time Object Detection Using
Raspberry Pi”, International Journal for Research in
Applied Science & Engineering Technology
(IJRASET), Vol. 11, Issue. I, 2023.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
240

Talha Bayrak, Vedat Marttin and Uğur Yüzgeç, “Raspberry
Pi Based Object Detection and Drawing”, Global
Conference on Engineering Research (GLOBCER’21),
2021.
U. Binay, N. Yadav, “Comparative Study of Object
Detection Algorithms”, International Research Journal
of Engineering and Technology (IRJET), Volume 4,
Issue 7, 2017.
W. Wang, Z. Li, J. Deng, H. Yao, X. Xuan, Z. Wang, “A
review of research on an object detection based on deep
learning”, Journal of Physics, 2020.
Xiaofei Zhang, Yunze He, Tomasz Chady, Guiyun Tian,
Jingwei Gao, Hongjin Wang and Sheng Chen, “CFRP
Impact Damage Inspection Based on Manifold
Learning Using Ultrasonic Induced Thermography”,
IEEE Transactions on Industrial Informatics, Vol. 5,
Issue. 5, pp. 2648- 2659, 2019.
Xiaoquan Shi, Yazhou Sun, Haiying Tian, Puthanveettil
Madathil Abhilash, Xichun Luo and Haitao Liu,
“Material Extrusion Filament Width and Height
Prediction via Design of Experiment and Machine
Learning”, Micromachines, Vol. 14, 2023.
Xiaoting Zhong, Brian Gallagher, Shusen Liu, Bhavya
Kailkhura, Anna Hiszpanski and T. Yong-Jin Han,
“Explainable machine learning in materials science”,
Computational Materials, Vol. 8, No. 204, 2022.
Inspection of Materials Dimensions Using Webcam in the Conveyor System
241
