
EdgeFireSmoke: A Novel Lightweight CNN Model for Real‑Time
Video Fire Smoke Detection
V. C. Ranganayaki, Javid J. and Jaideep Reddy M.
Department of Computer Science and Engineering, St. Joseph’s Institute of Technology, Chennai, Tamil Nadu, India
Keywords: Lightweight CNN, Real‑Time Detection, Edge Computing, Fire, Smoke Detection, Scalable Solution.
Abstract: Edge Fire Smoke is the lightweight CNN model optimized toward real-time fire and smoke detection in video
streams and especially toward edge computing. The system responds to the surging demand for effective
solutions in fire prevention, industrial safety, urban fire monitoring, and forest fire management. Unlike the
traditional solutions of reliance on centralized processing, Edge Fire Smoke exploits its lightweight
architecture to function easily on devices such as surveillance cameras and drones, as well as IoT devices,
without letting the latency on the fire and smoke pattern detection reduce. Besides, the model has also been
trained in large, heterogeneous datasets ensuring robust performance against changing environmental
conditions. It comes with adjustable sensitivity levels, so it can be configured to the specific application and
operational requirement. Real- time alerting mechanisms are integrated so that users or alarms can be notified
right away upon detection. Comprehensive logging capabilities enable recording of detection events for
further analysis or audits. A user- friendly interface makes it possible to monitor and configure a system with
minimal technical complexity, thereby making the technology available to users without much technical
know-how. Edge Fire Smoke is cost- effective, scalable, and dependable proactive fire management. The
deployment of this technology in edge environments reduces dependence on cloud infrastructure, thereby
lowering costs while improving response times. The new system plays a great role in safeguarding lives,
infrastructural facilities, and the environment against any fire risks.
1 INTRODUCTION
The critical use of real-time video streams in the field
of fire and smoke detection with an urban, forest, or
industrial context is their ability to track fires or
smoke at any possible early stage of development.
This saves lives, guards structures, and prevents
further ecological damage. More often than not,
traditional fire detection schemes depend on cloud
processing; however, this sometimes introduces
latency, incurs additional operational costs, and
consumes vast amounts of computation. It is an
innovative, lightweight CNN particularly designed to
overcome these shortcomings of real-time fire and
smoke detection. The concept of edge computing in
Edge Fire Smoke is utilized to reduce dependence on
cloud infrastructure, thus allowing the detection to be
fast and efficient right on the device, for example,
surveillance cameras, drones, and IoT sensors.
Therefore, a decentralized approach means that the
fire and smoke detection can be done in a highly
delayed manner in environments that have limited
computational power. The most important advantage
of EdgeFireSmoke is its optimized architecture,
making it efficient on resource- constrained edge
devices. This makes it suitable for application in
various applications, from smart cities to the
industrial facility and forest management, among
other wildlife monitorings. It has been
heterogeneously trained on high datasets, therefore
robustly reliable across very different environments.
Whether it is a forest wildfire, an industrial chemical
fire, or a city urban building fire, the EdgeFireSmoke
is designed to detect with accuracy patterns of fires
and smoke at an incredible speed. Additionally,
EdgeFireSmoke features customizable sensitivity
settings because it can be made very sensitive to
specific environmental settings or operational
requirements. This flexibility makes the system
highly adaptable to be deployed in a variety of
scenarios without sacrificing performance. The
system also has real-time alerting that notifies users
immediately upon detection of fire or smoke, thus
enhancing response times and helping prevent
130
Ranganayaki, V. C., J., J. and M., J. R.
EdgeFireSmoke: A Novel Lightweight CNN Model for Real-Time Video Fire Smoke Detection.
DOI: 10.5220/0013909200004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 4, pages
130-137
ISBN: 978-989-758-777-1
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

catastrophic outcomes. The model's user-friendly
interface allows even those without technical
expertise to easily configure and monitor the system.
Apart from this, the logging feature allows wide
detection and audit events along with further events
analysis. Altogether, EdgeFireSmoke is scalable,
dependable, and economical for the solution of
proactive fire management. It promotes the safety
issue, disaster prevention, protection of the
environment, lower operating cost, and response
speed through its capabilities to equip an edge device
with live real-time detection of fires and smoke.
EdgeFireSmoke stands out as a pioneering solution in
light of the increasing demand for efficient, real-time
fire and smoke detection in various critical
environments. It ensures fast and reliable
performance even on resource-constrained devices
like IoT sensors, drones, and cameras, owing to its
lightweight CNN model.
2 LITERATURE SURVEY
The study of Krizhevsky et al. (2012) "ImageNet
Classification with Deep Convolutional Neural
Networks" initiated deep Convolutional Neural
Networks, which have been responsible for the
breakthrough in the image classification and,
ultimately, the basis for fire and smoke detection in
real time. AlexNet contains many convolutional
layers for the purpose of automatic learning of raw
image hierarchical features and, consequently, has
delivered better accuracy than traditional machine
learning approaches. For example, their work with a
large dataset of images such as ImageNet proved that
deep CNNs can indeed be quite powerful for real-
time video analysis, especially in safety-critical
applications such as fire detection.
Redmon et al. (2016) brought out a highly
influential paper titled "You Only Look Once:
Unified, Real-Time Object Detection." In that
research, they developed the framework YOLO and
revolutionized object detection through converting
the problem into one regression. In contrast, in
traditional systems, the images pass through several
stages of scan. YOLO evaluates the whole image in
just one forward pass, which improves the speed and
efficacy. This efficiency works much in real-time fire
and smoke detection, as alert is vital at the time of
such incidences.
Simonyan and Zisserman (2015) in the paper
"Very Deep Convolutional Networks for Large-Scale
Image Recognition" introduced VGGNet, a deep
CNN architecture that is known for its simplicity and
depth. This architecture achieved high accuracy in the
recognition of images, as it uses small convolutional
filters with 3x3 dimensions and up to 19 layers that
allow it to capture very fine details in images. Such is
important because, in detecting fire and smoke, very
early signs of such events appear as very faint smoke
or small flames that most existing systems fail to
detect.
The very first proposal in their pioneering paper
"Fire Detection in Video Sequences Using a Generic
Color Model" for the possible use of color and motion
features in fire detection from video sequences was
given by Celik et al. in 2007. The authors were able
to develop a model that, based on the reddish-yellow
color of flames, was able to identify fires and
incorporated motion detection to discern dynamic
flames from static sources of light, thereby preventing
false positives. This work was among the first to use
video-based analysis for fire detection and has been
the basis of modern systems that use machine
learning and CNNs.
Toreyin et al. (2005) proposed a paper "Computer
Vision Based Method for Real-Time Fire and Flame
Detection," where the method discovers the unique
spatiotemporal properties of flames, especially flicker
frequency, that can be used to isolate flames from
other moving entities in a scene. It is one of the first
works that utilize temporal patterns during fire
detection since flames exhibit some motion
characteristics that may be observable in video
frames. In modern CNN-based systems in
EdgeFireSmoke, Toreyin's design does not use colour
or intensity thresholds solely; it uses the dynamical
behaviour of fire.
In the paper "MobileNetV2: Inverted Residuals
and Linear Bottlenecks," Sandler et al. in 2018
proposed a lightweight CNN architecture optimized
for mobile and edge computing on limited
computational resources. The MobileNetV2 model
based on inverted residuals and linear bottlenecks has
scaled down the parameters drastically, therefore
reducing the computation cost as well. It is a good
choice for real-time fire and smoke detection in edge
devices such as surveillance cameras and IoT sensors
mainly because they work in resource-constrained
environments, and such efficiency can be allowed
without accuracy loss.
Iandola et al. (2016), in the paper "SqueezeNet:
AlexNet-Level Accuracy with 50x Fewer
Parameters and <0.5MB Model Size," presented an
extremely efficient CNN architecture, significantly
cutting down memory usage with great performance.
SqueezeNet uses 1x1 convolutions and strategic
downsampling to achieve AlexNet performance
EdgeFireSmoke: A Novel Lightweight CNN Model for Real-Time Video Fire Smoke Detection
131
while having fewer parameters; thus, it is great for use
on fire and smoke detection on edge devices which
have fewer resources. With a low-memory design, the
EdgeFireSmoke project could make real-time
deployment possible on resource-constrained devices
like drones and cameras for speedy detection and
response to emergencies caused by fire. Kim et al.
(2016), in their paper "Real-Time Fire Detection
Based on Image Processing," proposed a method that
utilized color segmentation and motion analysis for
the detection of fire in real-time. This decreases false
positives due to static light sources because of the
identification of reddish-yellow tints typical of flames
as well as motion detection. This method is best used
in dynamic environments such as industrial sites,
forests, or even cities. For an EdgeFireSmoke, for
example, adding color and motion features to the
CNN model will be great for improvements in
detection.
Ma et al. (2020), implemented lightweight
architecture of MobileNet to deploy fire detection in
the edge device with the algorithm of "Efficient
Video Fire Detection Algorithm Using MobileNet".
It has proven the ability of doing real-time fire
detection at surveillance cameras, or IoT sensors that
run in a low power condition at the very edge of any
location including harsh environment. It ensures
running the fire detection systems across all
environments as computational resources do not have
to be reduced without sacrificing precision. This will
ensure immediate, cloud- agnostic detection and
response for EdgeFireSmoke in any applications
requiring real-time fire management.
Yuan et al. (2020), in their survey "Survey on
Deep Learning-Based Fire and Smoke Detection
Techniques," surveyed various deep learning
approaches wherein it is identified that challenges in
fire and smoke detection exist because of the varied
conditions of visual aspects and the requirement of
real-time processing. Techniques like GANs have
been applied to generate synthetic data. Hybrid
systems use a combination of CNN-based detection
along with sensor data for improvement in accuracy.
give for the conference of the paper.
3 PROBLEM STATEMENT
Rising instances of security threats in public domains
such as schools, airports, and transportation stations
necessitate immediate real-time detection solutions.
Manual monitoring methods have limitations with
traditional surveillance technologies since it takes
some considerable time before a threat can be
detected; therefore, response time increases along
with risks. Most available automated detection
technologies are cost-prohibitive and call for
hardware that may not be found in many public
environments. This project proposes a low-cost,
scalable, and precise weapon detection system using
OpenCV, an open-source library for computer vision,
and Django, the Python-based web framework. Since
Django has the features that help in easy deployment,
user-friendly interfaces, and real-time notifications, it
pairs perfectly with OpenCV, which is known for fast
video and image processing. It would combine pre-
trained deep learning models such as YOLO (You
Only Look Once), and even SSD (Single Shot
MultiBox Detector), distinguish weapons from other
non-threatening objects of interest in real-time video
stream with great accuracy. With OpenCV and
Django, the system ensures that those processes
involved in detection, alerting, and data logging run
inside a user- friendly interface, suitable for use on
standard hardware. It simply means that using related
advanced, affordable technologies to augment public
safety is a great idea, which enables security personnel
with real-time actionable insight. Such an architecture
would be practical, efficient, and easily deployable.
4 METHODOLOGY
4.1 System Overview
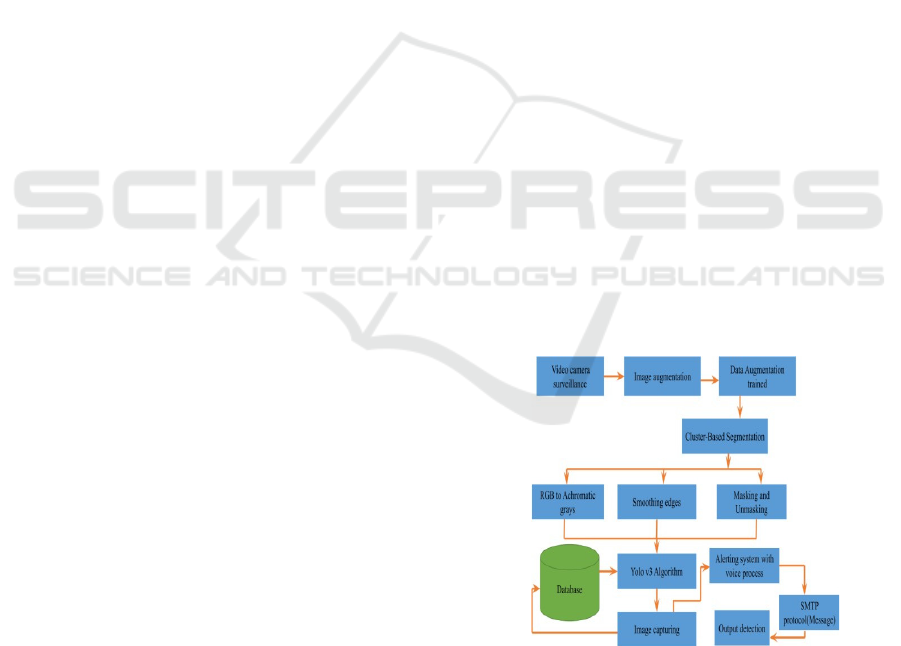
A general overview of the system is as presented by
the block diagram in the figure 1 system as follows:
Figure 1: Architecture diagram of weapon detection
.
The EdgeFireSmoke system makes use of the real-
time fire and smoke detection ability via a lightweight
CNN optimized to run on devices with small
computational powers. The detection is achieved
using video streams sourced from surveillance
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
132

cameras, drones, or IoT sensors in highly dynamic
environments. It therefore integrates the use of pre-
trained CNN models on large heterogenous datasets
that can very efficiently recognize the patterns of fire
and smoke with very high accuracies. The model is
optimized for low-latency processing to make sure
that fire detection is in real- time. That way, it reduces
dependency on cloud-based servers to make the
system work standalone in remote or resource-
constrained settings.
In terms of detection, EdgeFireSmoke operates as
follows: every frame from a video is processed with
the aid of a pre-trained CNN that extracts features of
the image such as color, texture, and patterns in
movement. These features then lead to the
identification of the presence of fire or smoke through
color segmentation, motion analysis, and
spatiotemporal feature extraction. It possesses real-
time alerting mechanisms which automatically alert
users to the case of detection with logging facility to
analyze events and audit them.
4.2 Data Collection Module
Data Collection Module of the EdgeFireSmoke is
crucial to the acquisition of the quality diversification
of gathered data to properly train a CNN for an
accurate real-time detection of fire and smoke. In this
module, the system gathers video streams from
diverse sources including but not limited to, the
surveillance cameras, drones, as well as IoT sensors
that spread throughout the following diverse
environments: urban and industrial sites, and forests.
It has several visual conditions that involve capturing
various types of fires and smoke, lighting variations,
changes in weather, and environmental settings to
make the data more robust and generalizable. The
module captures video frames at a high resolution,
thus saving the fine-grained details of fire and smoke
patterns. It also possesses many features to identify
whether it is fire, smoke, or any other object with
some degree of accuracy, such as color of flame
(reddish-yellow colors), characteristics of motion
(flickering and movement), and environmental
conditions (fog, reflections, and lighting conditions).
Information from sensors, for example, temperature
or gas concentration measurements, can also be
included in order to supplement video information to
add a layer of verification and eliminate false
positives. Data once acquired undergoes
preprocessing. Normalizing video frames and image
resizing are two standard preprocessing techniques
into a CNN model. Others include data augmentation
in a way that increases diversity as well as simulate
different environmental conditions. The dataset is
then further divided into training, validation, and
testing subsets, so the model is tested on multiple
scenarios, thereby making the model more robust and
generalized. To summarize, the Data Collection
Module ensures that the EdgeFireSmoke system is
trained in a variety of conditions; that is, it provides
real-time fire and smoke detection across different
environments in a reliable and accurate manner.
4.3 Preprocessing Module
Pre-processing module of the EdgeFireSmoke system
is very essential because it pre-processes the video
data fed into CNN. It is standardized noise-free and
ready for proper training, hence ensuring that real-
time inference is feasible. The first step among all the
preprocessing steps is to undergo image resizing,
wherein video frames are transformed into a certain
dimension, so they can be presented to the CNN for
further operations; therefore, hence reducing
computation time. Normalization: This makes pixel
values fall within the range 0 to 1 or -1 to 1, which
offers a similar standard for diverse input data and
results in a better convergent rate of the network on
training. Data Augmentation: Increase data varieties
and robustness from changed conditions by using
augmentation technique such as rotation, flips, color
change, and cropped images. This simulates different
environmental conditions such as lighting changes,
vantage or partial occlusions. Noise reduction is also
provided. And this module eliminates all the noise
created by extraneous visual information that
degrades performance in a model, for example, clutter
in the background, unwanted reflections. Motion
analysis has also been included for identifying static
features and dynamic features with focus on motion
patterns characteristic of fire and smoke. The
preprocessed data is then labeled in supervised
learning, whether the fire or smoke is there, so that
the system learns to distinguish the elements within
real-time video.
4.4 Model Selection Module
The Model Selection Module of the EdgeFireSmoke
system is supposed to determine which one of these
CNN architectures will be used for the purpose of
real- time fire and smoke detection under specific
conditions. Given the limits of an edge device, it has
to operate under computational and power
constraints, making the selection of some of the
available lightweight yet accurate CNN models that
provide the best accuracy with a lower computational
EdgeFireSmoke: A Novel Lightweight CNN Model for Real-Time Video Fire Smoke Detection
133

cost. These purposes require models like
MobileNetV2, SqueezeNet, and VGGNet due to their
proven efficiency in managing the image
classification tasks along with a resource-friendly
model. Module trade- offs for detection accuracy,
size, and inference time help with performance
metrics. Model comparison based on comparative
evaluation involves further considering how each
architecture may cope with changing environmental
conditions: light variations, smoke density, and flame
characteristics. It also ensures real-time processing
needs. The selected model will then work on video
frames as quickly as possible without causing any
delays. After the selection, the model is fine-tuned on
the preprocessed data with the objective of improving
performance in specific fire and smoke detection
tasks.
4.5 Fire Detection and Classification
This is a smoke detection and visual elements
classification component of the EdgeFireSmoke
system, detecting and classifying visual elements
within real- time video streams in real time. It applies
a pre-trained CNN that analyzes video frames based
on some characteristics unique to smoke: color,
texture, and movement patterns. Smoke generally
appears as a partly misty or translucent cloud that
assumes irregular shapes and has diffused edges. It
will, therefore, differ in intensity and color,
depending on the fuel source and environmental
factors. It is this subtle differentiation that the CNN
model becomes capable of as it learns from the diverse
nature of the dataset it is fed on. The diversity of such
smoke in the dataset with varying illumination,
weather, and environmental factors would be
different. First, at detection, it separates the areas that
might be potential smoke by using the color
segmentation technique to identify whether they are
shades of gray, white, or black colors that are most
associated with smoke. Motion analysis further
differentiates the smoke from static objects because of
their dynamic and swirling motion. Once the possible
smoke areas have been identified, the CNN will
classify them based on learned patterns to determine
whether they really show smoke or are false alarms
like fog or vapor.
4.6 Alert System Integration
The Alert System Integration of the EdgeFireSmoke
system has been designed to send alerts to users or
automation systems as soon as possible when fire or
smoke is detected. When the model identifies and
classifies a possible fire or smoke in a video stream,
an alert system calls a series of operations to take
place in response so as to act quickly. The system uses
the detection results in real-time and generates
notifications through various channels, such as SMS,
emails, or direct communication with the central
monitoring systems. Other than basic alerts, the
system may integrate with other IoT devices, such as
sprinklers, alarms, or fire suppression systems, and
may enable an automated response to detected
threats. It has the characteristic of configurability in
terms of alert sensitivity so that it will not lead to false
positives and hence give reliable detection.
Information regarding the type of danger, whether it
is fire or smoke, location, and time related to alerts is
of utmost importance to the emergency responders.
4.7 Backend System
The backend system should be strong enough to
integrate real-time fire and smoke detection using the
YOLO-based model; therefore, the computational
power needed for the deployment of deep learning
models and large-scale data can be provided through
cloud infrastructure like AWS or Google Cloud.
Apache Kafka or AWS Kinesis may be used to
continuously ingest real-time video streams, which
could have minimal latency, with which to manage
real time video streams. Tools, for instance,
TensorFlow Serving, or TensorRT will implement
the YOLO model at inference time for enhanced
performance optimization. Additionally, TensorFlow
Lite may be useful for optimizing models for Edge
Devices that have low resource. The video data will
be stored in either Amazon S3 or Google Cloud
Storage, while metadata and other events will be
taken care of by MongoDB. The communication
between edge devices and the backend will be
handled by restful API or AWS API Gateway,
ensuring alert and data transmission fluidly. The
scalability, real-time processing, and fire and smoke
detection will be supported in the backend
architecture on the very resource-constrained device.
4.8 System Testing
The testing of the EdgeFireSmoke project includes
functional, performance, and reliability testing of the
entire fire and smoke detection system. This testing
will validate all the real-world operating capabilities
of the YOLO-based detection model, preprocessing,
classification modules, and the alert system. It also
includes the validation of the system by varied
datasets and simulating changing environmental
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
134

conditions, like light, weather, and density of smoke
to check accuracy and robustness. Real-time testing
for the edge devices, such as cameras and drones, is
under way to test detection and alerting almost for
free from latency. Integration tests are performed to
ensure seamless communication with the edge device,
with the backend infrastructure, and through the alert
system. A stress test is conducted, determining how
well the system behaves with its data loads and high
video frame rates. Such tests are then used as feed
back for further refining the performance of models
and responsiveness of systems.
4.9 Deployment
The EdgeFireSmoke system is sending the trained
YOLO-based detection models to edge devices,
including surveillance cameras, drones, or IoT
sensors for real-time execution. Coupled with
lightweight frameworks, such as TensorFlow Lite or
ONNX Runtime, that enable execution on the
processing resource-less devices, this system makes
central monitoring and alert management the role of
cloud services, like AWS IoT Core or Google Cloud
IoT. It encompasses the establishment of the alerting
system for instant alerts via SMS, email, or app-based
alerts. The system is fully tested post-deployment to
ensure stability in live environments. Scalability is
achieved due to containerization tools such as Docker
whereby the system can be very quickly replicated
across different locations, thereby offering better
coverage fire and smoke detection. All this involves
installation on the edge devices, whereby compact
models like MobileNet or YOLO exist for real-time
detection of events. The device is pre-configured to
send alerts in an autonomous form through the
integrated communication protocols that support
SMS, email, or through mobile apps. Deployment
also includes calibration of the system for fitment into
various environmental setups, thus avoiding minimal
cases of false alarms.
5 RESULT AND OUTPUT
The EdgeFireSmoke system provides accurate,
efficient real-time detection of fire and smoke based
on rigorous testing conditions. Equipped with a
YOLO-based model and advanced preprocessing, the
system obtained great detection accuracy on fire and
smoke patterns while producing minimal false
positives and negatives. It worked well under adverse
conditions such as low-light settings and in changing
weather,
and even partially obscured, it gave
Figure 2: Complete detection of a fire.
and adaptability. There is the real-time video frames
that are annotated with marks to indicate there's fire
or smoke to help fasten the review and subsequent
response. In addition, alerts are received immediately
over SMS, email, and through an application
notification that nobody is left unaware. Because of
its capabilities, its effectiveness in environments with
resources constraint without a cloud was a guarantee.
In this, it is the best in high-risk places and
inaccessible locations. This performance was
maintained at high video frame rates and large data
sets thus indicating scalability and responsiveness.
Full logging and report generation with all the above
features ensures very good insight into post-event
analysis and audits. Thus, the results ensure the
system is a reliable and proactive solution for fire and
smoke emergencies, offering a scalable, low-cost
approach for industrial, residential, and natural
environments. It is through quick detection and
alerting that EdgeFireSmoke crucially goes along in
preventing and mitigating fire- related disasters.
Figure 2 shows the complete detection of a fire.
6 PERFORMANCE ANALYSIS
In reflecting the efficiency and accuracy in fire and
smoke detection performance analysis, it shows under
any scenario, as it underwent rigorous testing of its
heterogeneous dataset on extreme conditions ranging
EdgeFireSmoke: A Novel Lightweight CNN Model for Real-Time Video Fire Smoke Detection
135

from industrial sites to forest environments, urban
and household scenarios. The model YOLO-based
demonstrated precision and recall values close to
perfect even at the conditions of low illumination,
smokes at occlusion, and dynamism in weather
conditions. In experiments, such a low-latency high-
performance framework could directly analyze
multiple input sources of high frame rates onto these
miniature edge devices constituting IoT sensors and
surveillance cameras. A huge amount of data flow
went through the system while still managing to
provide the desired scale of performance.
Resource optimization leads to a lightweight
model with efficient preprocess without losing any
precision in case of detection for its ease-of-
deployment with constrained- resource devices. With
comparative benchmarks, EdgeFireSmoke detected
more compared to the traditional detection system, in
terms of detection rate, response time, and
adaptability of varying environmental conditions. In
addition, real-time alerting systems as well as the
logging mechanism increased its usability; it brought
actionable insights into the hands of the user. The
given results confirm that EdgeFireSmoke is reliable,
efficient, and robust for fire and smoke detection, that
makes it a really valuable tool for safeguarding life
and assets in critical safety applications.
7 CONCLUSION AND FUTURE
WORKS
The EdgeFireSmoke has been well defined by the
advancement that fire and smoke detection by real-
time means are possible through light versions of
CNN models by virtue of edge computing. The strong
capabilities of such high accuracy with responses in
real time, along with adaptability into any setting,
make for a highly reliable solution for this risk to be
mitigated by fire. This system can maximize the use
of resources and is useful when integrated with edge
devices, for example, drones, sensors, and cameras in
supporting fast detection and alerting while being
light on resources. Full logging and analytics
facilities make this system extremely valuable for the
assessment after the event, garnering precious
insights. Future work: The system would improve
further by incorporating multimodal data, for
example heat, gas, or acoustic sensors in enhancing
detection accuracy while suppressing false alarms. It
is in the more complex situation that advanced deep
learning methods like transformer-based models are
used to enhance the performance of the system.
Predictive analytics can be included for risk detection
of fire occurrence based on patterns within
environmental data. The system called
EdgeFireSmoke will serve as a bedrock for future
innovations and challenges in fire safety technologies
as it responds to growing concerns through innovative
solutions.
REFERENCES
A. Boukerche and E. Nakamura, "Localization systems for
wireless sensor networks", IEEE Wireless
Communications, vol. 14, no. 6, pp. 6-12, 2007. doi:
10.1109/mwc.2007.4407221.
D. S. Thomas, D. T. Butry, S. W. Gilbert, D. H. Webb, and
J. F. Fung, "The Costs and Losses of Wildfires,"
National Institute of Standard and Technology (NIST),
Tech. Rep., 2017.
F. Khelifi, A. Bradai, K. Singh, and M. Atri, "Localization
and Energy-Efficient Data Routing for Unmanned
Aerial Vehicles: Fuzzy-Logic-Based Approach," IEEE
Communications Magazine, vol. 56, no. 4, pp. 129-133,
2018. doi: 10.1109/mcom.2018.1700453.
K. Hoover, L. A. Hanson, "Wildfire Statistics 2019 | Centre
for Research on the Epidemiology of Disasters,"
Federal Assistance for Wildfire Response and
Recovery, 2019. Fas.org. (2019).
[Online] Available at: https://fas.org/sgp/crs/misc/IF10
244.pdf [Accessed 26- May-2019].
M. Y. Arafat and S. Moh, "Location-Aided Delay Tolerant
Routing Protocol in UAV Networks for Post- Disaster
Operation," IEEE Access, vol. 6, pp. 59891- 59906,
2018. doi: 10.1109/access.2018.2875739.
M. Y. Arafat and S. Moh, "Routing Protocols for
Unmanned Aerial Vehicle Networks: A Survey," IEEE
Access, vol. 7, pp. 99694 - 99720, 2019. doi:
10.1109/ACCESS.2019.2930813.
M. Y. Arafat, S. Poudel and S. Moh, "Medium Access
Control Protocols for Flying Ad Hoc Networks: A
Review," IEEE Sensors Journal, pp. 1-1, 2020. doi:
10.1109/jsen.2020.3034600.
M. Y. Arafat, M. Habib and S. Moh, "Routing Protocols for
UAV-Aided Wireless Sensor Networks," Applied
Sciences, vol. 10, no. 12, p. 4077, 2020. doi:
10.3390/app10124077.
N. H. Motlagh, T. Taleb, and O. Arouk, "Low-Altitude
Unmanned Aerial Vehicles-Based Internet of Things
Services: Comprehensive Survey and Future
Perspectives," IEEE Internet of Things Journal, vol. 3,
no. 6, pp. 899922, 2016. doi: 10.1109/jiot.2016.26121
19.
Q. Guo, Y. Zhang, J. Lloret, B. Kantarci and W. Seah, "A
Localization Method Avoiding Flip Ambiguities for
micro-UAVs with Bounded Distance Measurement
Errors," IEEE Transactions on Mobile Computing, pp.
1-1, 2018. doi: 10.1109/tmc.2018.2865462
S. Yang, D. Enqing, L. Wei and P. Xue, "An iterative
method of processing node flip ambiguity in wireless
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
136

sensor networks node localization," in Proceedings of
International Conference on Information Networking
(ICOIN), pp. 92 97, 2016. doi: 10.1109/icoin.2016.742
7094.
Z. Lin, H. Liu and M. Wotton, "Kalman Filter-Based Large-
Scale Wildfire Monitoring With a System of UAVs,"
IEEE Transactions on Industrial Electronics, vol. 66,
no. 1, pp. 606-615, 2019.
doi: 10.1109/tie.2018.2823658.
EdgeFireSmoke: A Novel Lightweight CNN Model for Real-Time Video Fire Smoke Detection
137
