
Identification of Objects in Autonomous Vehicles
R. Tejaswi, K. Navya, D. Bhavya Sree, C. Sarika Reddy and C. Anitha
Department of Computer Science and Engineering, Ravindra College of Engineering for Women, Kurnool, Andhra
Pradesh, India
Keywords: Autonomous Vehicles, Object Detection, YOLO v11, Real‑Time Processing, Sensor Fusion, Traffic Sign
Recognition, Obstacle Detection, Adverse Weather, Low‑Light Conditions, Deep Learning.
Abstract: In order to keep tabs on obstacles, people, autos, and traffic signs in real time, autonomous vehicles rely on
object detecting systems. In this study, we look at the potential benefits of YOLO v11, a real-time object
detection method that has recently been enhanced, for autonomous driving systems. YOLO v11's enhanced
architectures, feature extraction networks, and detecting heads allow for faster and more accurate object
recognition. Apt for use in mission-critical settings, the model swiftly processes high-resolution images. When
it comes to low-light and bad-weather object detection, YOLO v11 shines after extensive training on huge
datasets like KITTI and BDD100K. Autonomous vehicle sensor fusion and real-time decision-making
modules are also integrated into YOLO v11 in this study. The reliability and security of autonomous driving
are enhanced by better detection accuracy, processing efficiency, and resilience.
1 INTRODUCTION
Safe navigation in difficult environments is now
possible with the help of advanced object detecting
technology. To keep drivers and pedestrians safe,
these devices monitor road conditions, obstacles, and
traffic signals in near real-time. Conventional object
detection methods are inefficient and prone to errors
in low-light and adverse weather conditions.
The improved real-time object detection model
YOLO v11 is tested in this research for its potential
use in autonomous vehicles. Thanks to revamped
architectures, feature extraction networks, and head
detection, YOLO v11 greatly enhances the speed and
accuracy of object recognition. Designed for mission-
critical autonomous driving systems, the model excels
in a variety of scenarios employing massive datasets
such as KITTI and BDD100K.
This research uses a combination of YOLO v11,
real time decision-making modules, and sensor fusion
to increase the reliability of detection. Autonomous
vehicle navigation is now safer and more dependable
in difficult environments because to improvements in
detection accuracy, processing efficiency, and
resilience.
2 LITERATURE SURVEY
2.1 SSD: Single Shot Multibox Detector
https://arxiv.org/abs/1512.02325
A single deep neural network is utilised for picture
identification. For each point in the feature map, SSD
transforms the bounding box output into a default box
that may be adjusted in size and aspect ratio. In order
to make precise predictions, the network sorts things
into categories and adjusts the default boxes so that
they suit the objects' forms. The network can
automatically adapt to objects of varying sizes by
using predictions from many feature maps with
varying resolutions. Compared to object proposal
approaches, our SSD approach is easier since it
eliminates the need to create proposals and resample
pixels or features, and instead uses a single network
for all processing. Both training and integrating SSD
into detection systems is a breeze. On the PASCAL
VOC, MS COCO, and ILSVRC datasets, SSD
achieves accuracy on par with object proposal
methods while being faster and providing a unified
framework for training and inference. Even when
working with smaller input photographs, SSD
outperforms other single-stage algorithms in terms of
accuracy. Using a
224
Tejaswi, R., Navya, K., Sree, D. B., Reddy, C. S. and Anitha, C.
Identification of Objects in Autonomous Vehicles.
DOI: 10.5220/0013895800004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 3, pages
224-229
ISBN: 978-989-758-777-1
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

300x300 input and a 500x500 input, SSD achieves
72.1% mAP on the VOC2007 test at 58 FPS on Nvidia
Titan X, whereas Faster R-CNN achieves 75.1%.
2.2 Mobile Nets: Efficient
Convolutional Neural Networks for
Mobile Vision Applications
https://arxiv.org/abs/1704.04861
When it comes to embedded and mobile vision, our
MobileNets models are top-notch. Using depth-wise
separable convolutions, MobileNets' simplified
design constructs lightweight deep neural networks.
We provide a pair of straightforward global hyper-
parameters that strike a good compromise between
accuracy and latency. Based on the constraints of the
problem at hand, model builders can select the ideal
model size using these hyper-parameters. We surpass
other well-known ImageNet classification methods
after doing thorough investigations of the accuracy vs.
resource tradeoff. Following this, we demonstrate that
MobileNets are effective at identifying items,
classifying fine-grained features, identifying faces,
and performing large-scale geo-localization.
2.3 Developing a Real-Time Gun
Detection Classifier
https://www.semanticscholar.org/paper/Developinga
RealTime- Gun- Detection- ClassifierLai/fc4ecaede0
52bd47515fa64ea21aeea9a9b3e5fc
Convolutional Neural Networks can enhance
surveillance by detecting objects in real time.
Detecting pistols and guns is one use. Infrared data for
hidden weapons has largely been utilised for weapon
detection. In contrast, we are focused in quick weapon
detection and identification from photos and
surveillance data. For picture-based weapon
identification and categorisation, the Overfeat
network was constructed using Tensorflow. By
adjusting the hyperparameters, we achieved the
highest accuracy on Overfeat-3, 93% during training
and 89% during testing.
2.4 Application of Object Detection
and Tracking Techniques for
Unmanned Aerial Vehicles
https://www.sciencedirect.com/science/article/pii/S1
877050 915030136
Objects in motion that can cause problems at the
border between the United States and Mexico are
being monitored by unmanned aerial vehicles (UAVs)
as part of this endeavour. Border encroachment and
immigrant trespassing pose a significant threat to US
border security and DHS. No amount of human
monitoring can possibly go through all the data to find
suspicious activity. Intelligent visual surveillance
technologies that can identify and track unusual or
suspicious video events are going to be a big part of
this project so that human operators can do their jobs
better. Accurate and fast tracking of moving objects is
essential for the visual surveillance system. Object
identification and tracking algorithms for unmanned
aerial vehicles were the focus of this study. For object
recognition, we used adaptive background reduction.
Optical flow tracking using Continuously Adaptive
Mean-Shift and Lucas-Kanade followed objects in
motion. The results of the simulations show that these
algorithms are able to detect and follow objects in
UAV footage that are in motion.
2.5 Object Detection Algorithms for
Video Surveillance Applications
https://ieeexplore.ieee.org/document/8524461
Defence, security, and healthcare all make use of
object detection algorithms. Improved accuracy in
video surveillance applications may be achieved by
modelling and developing object detection algorithms
in MATLAB 2017b. These techniques include face,
skin, colour, shape, and target detection. Additionally,
we cover object detection issues and their potential
uses.
3 METHODOLOGY
3.1 Proposed Undertaking
Autonomous vehicles are able to identify obstacles,
people, and other vehicles with remarkable speed and
accuracy with the help of YOLO v11. This makes it
easier to travel without crashing. Because it can
withstand poor light and harsh weather, it may be used
anytime, anyplace. Additionally, the system enhances
safety by informing the vehicle about detected objects
from a distance, eliminating the need for close
proximity. Furthermore, by providing accurate object
recognition and decision-making, the system reduces
unnecessary human intervention, allowing
autonomous vehicles to operate independently with
minimal public interference.
Identification of Objects in Autonomous Vehicles
225

3.2 System Design
The architecture of the proposed YOLO v11-based
object detection system for autonomous vehicles is
designed to ensure accurate and real-time
identification of pedestrians, vehicles, traffic signs,
and obstacles. The system begins with an input data
acquisition module, where vehicle-mounted cameras,
LiDAR, and radar capture realtime environmental
data. By working together, these sensors provide a
comprehensive view of the surrounding area,
allowing for accurate detection in any driving
condition.
Next, the preprocessing module normalizes and
augments the collected data, improving robustness
against environmental variations such as low light and
adverse weather. This step ensures that the detection
model receives high-quality input for optimal
performance. The system is dependent on the YOLO
v11 object detection engine, which is equipped with
an optimised detection head for object localisation
and classification, a feature pyramid network (FPN)
for multi-scale detection, and an improved backbone
for feature extraction.
In order to enhance accuracy and decrease
duplicate detections, the post-processing module
employs NonMaximum Suppression (NMS).
Combining data from many sensors, such as LiDAR,
radar, and cameras, enhances situational awareness
and the ability to pinpoint objects. Finally, the
decision-making module processes the refined object
information and assists autonomous vehicles in
making real-time navigation decisions. This ensures
obstacle avoidance and smooth movement while
reducing reliance on human intervention.
By integrating advanced detection, processing,
and decision-making capabilities, this architecture
delivers high accuracy, low latency, and adaptability
to different environmental conditions, making
autonomous vehicles safer and more efficient.
3.2.1 YOLOv11
YOLO, a state-of-the-art item recognition technology,
is quick and precise. YOLOv11 is envisioned to be the
next major advancement in the YOLO family,
improving upon YOLOv8’s capabilities with
enhanced model architecture, greater efficiency, and
adaptability for complex environments, autonomous
vehicles, robotics, and monitoring systems
transportation, robotics, and monitoring settings.
3.2.2 Key Features of YOLOv11
• Real-Time Object Detection: Faster than
previous versions with minimal latency,
making it suitable for highspeed applications.
• Higher Accuracy: Improved detection
performance, especially for small, distant, or
occluded objects.
• Lightweight Architecture: Optimized for
deployment on edge devices like drones,
smartphones, and embedded systems.
• Adaptive Learning: Potential integration of
selfsupervised learning techniques to improve
performance with limited labeled data.
• Cross-Modal Detection: Enhanced capability
to process multimodal data, such as combining
camera inputs with LiDAR or radar.
3.2.3 YOLOv11 Architecture
The architecture of YOLOv11 would likely consist of
three main components:
• Backbone
o Possibly an evolution of
CSPDarknet++ or a novel lightweight,
high-performance network. Designed
for efficient feature extraction with
deeper layers and attention
mechanisms (like SE blocks or
Transformer-based modules).
o Better handling of spatial hierarchies,
making it robust for detecting small
and large objects simultaneously.
• Neck
o We have improved the FPN and PANet
to make them better at fusing features
from different scales.
o Introduction of dynamic routing or
attention-based feature selection to
prioritize important spatial regions.
o Optimized for reducing computational
overhead while maintaining rich
feature representation.
• Detection Head
o Shift towards anchor-free detection
methods to simplify the architecture
and improve generalization.
o Advanced bounding box regression
techniques with dynamic IoU-based
loss functions (like CIoU++).
o Enhanced confidence scoring
mechanisms to reduce false positives.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
226
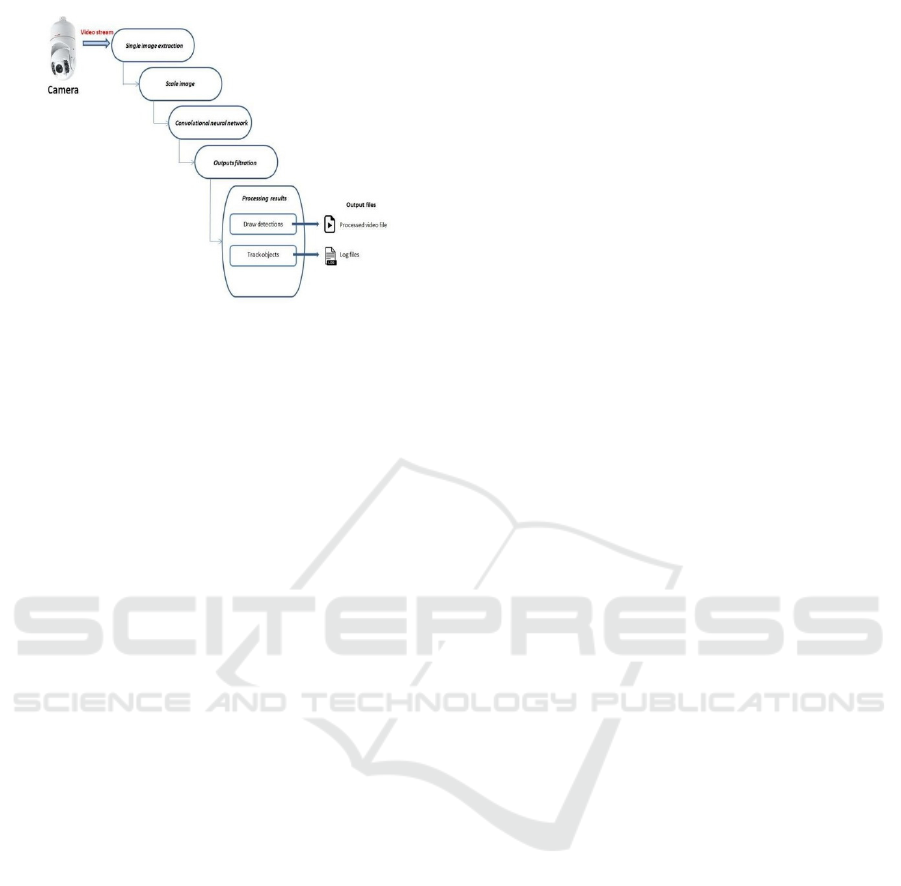
Figure 1: Proposed Architecture.
Above Figure 1 Shows the Proposed architecture.
4 IMPLEMENTATIONS
4.1 Modules
4.1.1 Browse System Videos Module
• Allows users to upload any video from
their system.
• The application connects to the uploaded
video and starts playing it.
• While playing, the system detects objects
and marks them with bounding boxes.
• Users can stop tracking and video playback
by pressing the ‘q’ key.
4.1.2 Start Webcam Video Tracking Module
• Connects the application to the system's
inbuilt webcam for live video streaming.
• Detects objects in real-time and highlights
them using bounding boxes.
• Users can stop webcam tracking by
pressing the ‘q’ key.
These modules ensure efficient real-time object
detection for both pre-recorded and live video
streams.
4.2 Algorithms
4.2.1 YOLO v11 (You Only Look once:
Version 11) Algorithm
The YOLO v11 model, which is based on deep
learning and uses real-time object recognition, is able
to efficiently analyse photographs with just one
neural network pass. It features an advanced
backbone for extracting meaningful features, a FPN
for detecting objects at multiple scales, and an
optimized detection head for precise localization.
YOLO v11 is well-suited for real-time applications,
ensuring high-speed and accurate object recognition
in autonomous vehicles.
4.2.2 Non-Maximum Suppression (NMS)
Algorithm
The NMS algorithm is used to refine object detection
results by eliminating redundant and overlapping
bounding boxes. It selects the most relevant
detections based on confidence scores, ensuring that
only the most accurate bounding box is retained. This
technique improves the detection accuracy by
reducing false positives and ensuring clear object
boundaries.
4.2.3 Frame Processing Algorithm
The Frame Processing Algorithm captures and
processes individual video frames from either a
recorded video or a live webcam feed. Each frame is
resized and normalized before being passed to the
YOLO v11 model for detection. This ensures
consistent input quality, allowing the detection
system to function efficiently under different lighting
and environmental conditions.
4.2.4 Key Event Handling Algorithm
The Key Event Handling Algorithm is responsible for
monitoring user inputs to control video playback and
object tracking. If the user presses the ‘q’ key, the
system stops the video or webcam streaming,
releasing resources and terminating the detection
process. This functionality allows users to have
manual control over the tracking system.
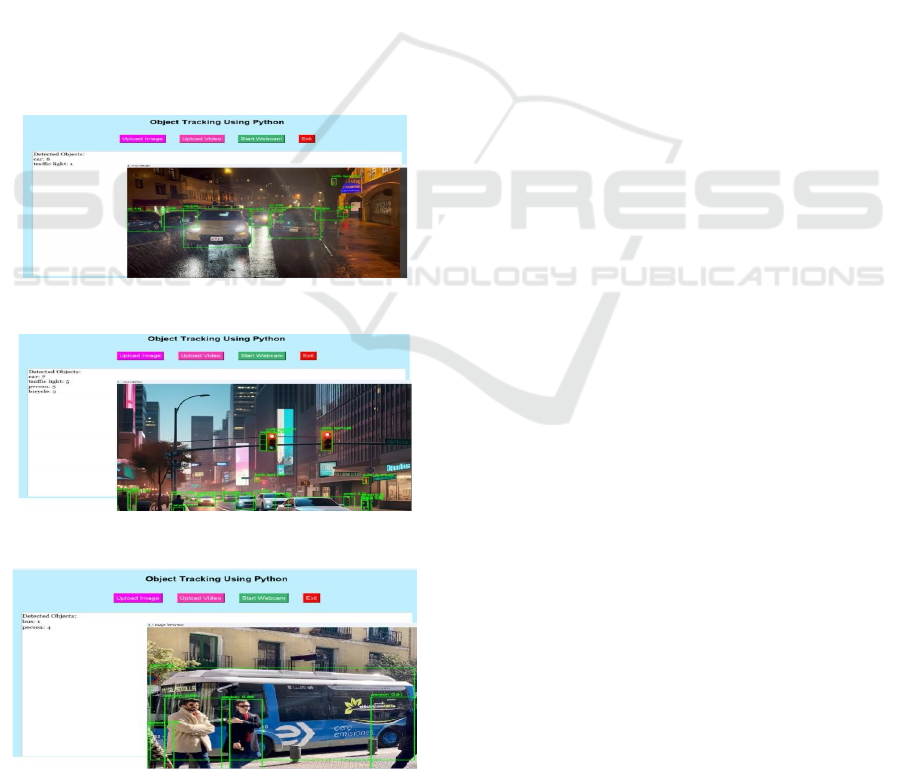
5 EXPERIMENTAL RESULTS
Using both recorded videos and live webcam
broadcasts, the suggested object detection system
based on YOLO v11 was evaluated for accuracy,
speed, and adaptability. Accurate boundary boxes
were produced via real-time detection and
categorisation of people, vehicles, traffic signs, and
obstacles. In challenging scenarios, sensor fusion
methods improved the accuracy of object localisation
and recognition.
Identification of Objects in Autonomous Vehicles
227
Particularly in terms of detection accuracy, the
model fared well in poor lighting and adverse weather
conditions. After rigorous testing on benchmark
datasets like as KITTI and BDD100K, YOLO v11
shown an improvement in the recognition of small
and faraway objects compared to previous versions.
The NMS algorithm kept just the most significant
detections while removing false positives.
Detection in real time with zero delay was
achieved by processing at a fast frame rate. YOLO
v11 is well-suited for autonomous driving mission-
critical applications due to its optimised architecture,
which swiftly processes high resolution frames. The
system quickly responded to recognised items while
tracking a live camera, allowing for smooth real-time
surveillance.
There were no problems for users, and tracking
ceased when the 'q' key was clicked. The proposed
system's short latency, high detection accuracy, and
robust performance were demonstrated in the testing
results, demonstrating its reliability for autonomous
vehicle object identification. Figure 2,3 and 4 Shows
the Results 1,2 and 3.
Figure 2: Result.1.
Figure 3: Result.2.
Figure 4: Result.3.
6 CONCLUSIONS
The proposed YOLO v11-based object detection
system effectively enhances real-time recognition of
pedestrians, vehicles, traffic signs, and obstacles in
autonomous driving environments. By integrating
advanced feature extraction, multi-scale detection,
and sensor fusion, the system ensures high accuracy,
even in low-light and adverse weather conditions. The
optimized processing architecture enables real-time
performance with minimal latency, making it suitable
for mission-critical applications. Experimental results
demonstrate that the system performs efficiently on
both pre-recorded and live video streams, providing
reliable and precise object detection. This research
contributes to improving the safety and reliability of
autonomous vehicles through enhanced perception
and decision-making capabilities.
7 FUTURE SCOPE
The proposed YOLO v11-based object detection
system can be further enhanced in several ways.
Future research can focus on integrating deep sensor
fusion by taking use of data collected by thermal
cameras, radar, and LiDAR to improve detection
accuracy in extreme conditions like fog and heavy
rain. Additionally, optimizing the model using
lightweight neural networks can enable deployment
on edge devices, reducing dependency on high-end
computing resources.
Another promising direction is the
implementation of self-learning mechanisms using
reinforcement learning, allowing the system to adapt
to new environments and improve detection over
time. Furthermore, integrating the detection module
with V2X (Vehicle-to-Everything) communication
can enhance real-time decision-making by
exchanging object detection data with nearby vehicles
and infrastructure. These advancements will further
improve the safety, efficiency, and reliability of
autonomous driving systems.
REFERENCES
Benjumea, Aduen, et al. "YOLO-Z: Improving small object
detection in YOLOv5 for autonomous vehicles." arXiv
preprint arXiv:2112.11798 (2021).
Cai, Z., & Vasconcelos, N. (2019). Cascade R-CNN: high
quality object detection and instance segmentation.
IEEE transactions on pattern analysis and machine
intelligence, 43(5), 1483-1498.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
228

Corovic, A., Ilic, V., Duric, S., Marijan, M., & Pavkovic,
B. (2018). The Real-Time Detection of Traffic
Participants
Using YOLO Algorithm.2018 26th Telecommunicatio
ns Forum (TELFOR).
doi:10.1109/telfor.2018.8611986
Cugurullo, F., & Acheampong, R. A. (2020). Smart cities.
In O. Jensen, B. Lassen, V. Kausfmann, M. Freudendal-
Pedersen, & I. S. G. Lange (Eds.), Handbook of urban
motilities. Routledge. [13] Wiseman, Yair.
"Autonomous vehicles." Research Anthology on Cross-
Disciplinary Designs and Applications of Automation.
IGI Global, 2022. 878-889. [14] Ahangar, M. Nadeem,
et al. "A survey of autonomous vehicles: Enabling
communication technologies and challenges." Sensors
21.3 (2021): 706.
Culley, Jacob, et al. "System design for a driverless
autonomous racing vehicle." 2020 12th International
Symposium on Communication Systems, Networks
and Digital Signal Processing (CSNDSP). IEEE, 2020.
Du, L., Zhang, R., & Wang, X. (2020, May). Overview of
two stage object detection algorithms. In Journal of
Physics: Conference Series (Vol. 1544, No. 1, p.
012033). IOP Publishing.
Fan, Q., Brown, L., & Smith, J. (2016, June). A closer look
at Faster R- CNN for vehicle detection. In 2016 IEEE
intelligent vehicles symposium (IV) (pp. 124-129).
IEEE.
G. P. Meyer, A. Laddha, E. Kee, C. Vallespi-Gonzalez, and
C. K. Wellington, “Lasernet: An efficient probabilistic
3d object detector for autonomous driving,” in
Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, 2019, pp. 12 677–12
686 [8] D. Feng, L. Rosenbaum, F. Timm, and K.
Dietmayer, “Leveraging heteroscedastic aleatoric
uncertainties for robust real-time lidar 3d object
detection,” in 2019 IEEE Intelligent Vehicles
Symposium (IV). IEEE, 2019, pp. 1280–1287.
Lee, J., Wang, J., Crandall, D., Sabanovic, S., & Fox, G.
(2017). Real- Time, Cloud-Based Object Detection for
Unmanned Aerial Vehicles. 2017 First IEEE
International Conference on Robotic Computing (IRC).
doi:10.1109/irc.2017.77
Lin, T. Y., Dollár, P., Girshick, R., He, K., Hariharan, B.,
& Belongie, S. (2017). Feature pyramid networks for
object detection. In Proceedings of the IEEE conference
on computer vision and pattern recognition (pp.
21172125).
Lin, T. Y., Dollár, P., Girshick, R., He, K., Hariharan, B.,
& Belongie, S. (2017). Feature pyramid networks for
object detection. In Proceedings of the IEEE conference
on computer vision and pattern recognition (pp.
21172125).
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C. Y., & Berg, A. C. (2016, October). Ssd: Single
shot multibox detector. In European conference on
computer vision (pp. 21-37). Springer, Cham.
Masmoudi, M., Ghazzai, H., Frikha, M., & Massoud, Y.
(2019, September). Object detection learning
techniques for autonomous vehicle applications. In
2019 IEEE International Conference on Vehicular
Electronics and Safety (ICVES) (pp. 1 IEEE.
Object Detection in 2022: The Definitive Guide. Available
online: https://viso.ai/deep-learning/object-detection/
Pan, H., Wang, Z., Zhan, W., & Tomizuka, M. (2020,
September). Towards better performance and more
explainable uncertainty for 3d object detection of
autonomous vehicles. In 2020 IEEE 23rd International
Conference on Intelligent Transportation Systems
(ITSC) (pp. 1-7). IEEE.
Sarda, A., Dixit, S., & Bhan, A. (2021). Object Detection
for Autonomous Driving using YOLO [You Only Look
Once] algorithm. 2021 Third International Conference
on Intelligent Communication Technologies and
Virtual Mobile Networks (ICICV).
Sarda, A., Dixit, S., & Bhan, A. (2021). Object Detection
for Autonomous Driving using YOLO algorithm. 2021
2nd International Conference on Intelligent
Engineering and Management (ICIEM).
Sharma, T.; Debaque, B.; Duclos, N.; Chehri, A.; Kinder,
B.; Fortier, P. Deep Learning-Based Object Detection
and Scene Perception under Bad Weather Conditions.
Electronics 2022, 11, 563
Springenberg, J. T., Dosovitskiy, A., Brox, T., &
Riedmiller, M. (2014). Striving for simplicity: The all
convolutional net. arXiv preprint arXiv:1412.6806.
Takumi, Karasawa; Watanabe, Kohei; Ha, Qishen; Tejero-
De Pablos, Antonio; Ushiku, Yoshitaka; Harada,
Tatsuya (2017). [ACM Press the - Mountain View,
California, USA (2017.10.23-2017.10.27)]
Proceedings of the on Thematic Workshops of ACM
Multimedia 2017 - Thematic Workshops '17 -
Multispectral Object Detection for Autonomous
Vehicles., (), 35–43.
US Department of Transportation National Highway
Traffic Safety Administration, Critical Reasons for
Crashes Investi gated in the National Motor Vehicle
Crash Causation Survey, NHTSA, Washington, DC,
USA, 2015.
Wang, H., Liu, B., Ping, X., & An, Q. (2019). Path Tracking
Control for Autonomous Vehicles Based on an
Improved MPC. IEEE Access, 7, 10.1109/access.2019
.2944894 161064–161073. doi:
Identification of Objects in Autonomous Vehicles
229
