
Efficient Task Scheduling Algorithm Using FreeRTOS for
Autonomous Vehicles: Enhanced Safety and Adaptive Features
A. Ravi, P. Veena, R. Jeyabharath, P. Prasanth, S. Sathya Ayanar and N. Mathivathanan
Department of Electrical and Electronics Engineering, K.S.R College of Engineering. Tiruchengode, Tamil Nadu, India
Keywords: IoT‑Based Weather Monitoring, Vibration Sensors, Gyroscope, Free RTOS, Autonomous Vehicles, Obstacle
Detection, Sensor Fusion, Applications, Transportation, Obstacles.
Abstract: The research aims to develop an intelligent autonomous vehicle system using multi-sensor integration and
real-time data processing in enhancement of road safety and efficiency in navigation. The system uses IoT-
based weather monitoring through rain and temperature sensors, vibration and gyroscope sensors for detection
of road anomalies as well as ESP32CAM for real-time obstacle identification. Free RTOS manages sensor
data processing and task execution, which means adaptive responses in braking, steering, and speed control.
IoT-based sensors adjust the navigation based on road friction. Vibration and gyroscope sensors detect
potholes and slippery surfaces. ESP32CAM will ensure real-time detection of obstacles, including pedestrians
and animals, at a range of 3-4 meters. Testing showed a 95% success rate in detecting road irregularities and
3-4 meters in detecting obstacles with a reduced 25% response time. Live weather information provides real-
time adjustments to navigation to increase both safety and comfort. The design is robust and adaptable to
challenges posed by urban environments thanks to multisensory technologies and real-time data for precision
and safety in operation. Future work can benefit from vehicular decision-making, range prediction, and
performance improvements.
1 INTRODUCTION
Interest in self-driven cars has been increasing, and
AVs refer to self-navigating machines that can carry
people and loads. What was once used only
industrially and militarily is now being considered for
further scopes of societal deployment in eliminating
routine, hazardous, and laborious tasks
conventionally performed by mankind. These
vehicles include self-driving cars, autonomous
mobile robots, and unmanned aerial, surface, and
underwater vehicles. All AVs share a common
challenge: autonomous navigation in diverse and
dynamic environments without human intervention.
The ability to detect and avoid obstacles is a basic
requirement for the enhancement of the autonomy of
these vehicles. The author proposed that distance-
measuring LiDAR sensors are extremely reliable and
hence have become very popular choices for
performing obstacle avoidance in systems (Leong et
al. 2024). Using a single sensor of any one kind has
not often proved sufficient for real environments due
to complexities involved (Leong et al. 2024). Sensor
fusion, that is, having more than one sensor included
in the system, becomes increasingly important and is
taking a step forward in the enhancement of obstacle
detection and avoidance performance and reliability.
In this review, the emphasis will be on how LiDAR-
based systems, combined with other sensors and
algorithms, improve AV capabilities. This review
points out the emerging trends and future research
directions in this domain.
Current research focuses on the critical role of
LiDAR sensors in AVs because of their high
precision and reliability in distance measurement. For
example, the author pointed out that LiDAR systems
allow AVs to create accurate 3D maps and detect
obstacles in real time. These systems, however, come
with limitations in conditions with heavy rain or
dense foliage and thus require the use of
complementary sensors (Tang et al. 2024). Sensor
fusion technologies used to integrate information
from numerous sources towards enhancing the
detection of obstacles and awareness of situations
represent another major step. LiDAR, coupled with
cameras, ultrasonic sensors, and Inertial
Measurement Units, endows AVs with capabilities
for adaptation under complex and dynamically
Ravi, A., Veena, P., Jeyabharath, R., Prasanth, P., Ayanar, S. S. and Mathivathanan, N.
Efficient Task Scheduling Algorithm Using FreeRTOS for Autonomous Vehicles: Enhanced Safety and Adaptive Features.
DOI: 10.5220/0013895700004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 3, pages
215-223
ISBN: 978-989-758-777-1
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
215

changing environments while fast-moving or small
object identification (Leong et al. 2024). This would
thus not only support safety but also extend the range
of functionality offered to AVs in heavier
environments. The importance of multi-sensor
strategies had been highlighted through these studies
for overcoming limitations in their individual
approaches and for improving the technology
concerning AVs.
Another area where significant attention is
focused is the application of AI in changing the
transportation and logistics scenario. Autonomous
delivery systems and autonomous public transport are
the most significant applications of AVs.
Autonomous delivery systems have been considered
an essential innovation in logistics in which AVs can
be used for transporting goods effectively and safely.
It has cut down the cost of delivery and reduced
environmental impact as it has limited use of
traditional modes of delivery. (Hafssa et al. 2024)
have asserted that autonomous delivery robots can
easily travel through an urban environment, can avoid
any kind of obstacle and ensure time deliveries with
LiDAR and computer vision systems integrated with
them. Examples include Amazon and FedEx, who
already use the system in their operations. Thus, this
proves that the technology indeed is useful and can be
developed further. The other revolution of application
would be the self-driving public transport, aiming at
making journeys easier and eliminating congestion in
roads. Several cities across the globe have tried out
the idea of using self-driving buses and shuttles to
take people safely and reliably from one place to
another. As noted by (Xiao et al. 2024), such vehicles
are designed with LiDAR and GPS technologies that
allow them to move and avoid obstacles in their path.
Self-driving public transport is efficient and
environmentally friendly because it minimizes the
release of greenhouse gases compared to the
conventional public transport systems.
2 RELATED WORKS
Latest studies with autonomous systems show some
major developments in the areas of obstacle
detection, sensor fusion, and real-time decision-
making. Emphasis is instead on switching from
LiDAR-based systems to the integration of multiple
sensors, such as cameras, ultrasonic sensors, and
IMUs, to achieve performance in diverse conditions.
Although much progress has been made to this end
with algorithms optimized and systems improved to
withstand dynamic environments, current research
into the problem concludes that such system
integration lacks integration for dependable efficient
navigation. With 12 references made from journals
with peer-review editions, conference and technical
report issues, a picture of broad investigation in the
areas is derived herein.
Recent literature in the area of autonomous
vehicles reveals a large degree of development,
especially concerning sensor fusion and collision
avoidance. Sensor fusion has been considered to be
an essential method of making AVs more reliable,
and especially the obstacle detection and safe
navigation in dynamic environments have been
highly focused on by (Leong et al. 2024). This study
focuses on LiDAR and other sensors such as cameras,
ultrasonic sensors, and IMUs to make the vehicle
react to different environmental conditions. For
example, sensor fusion has improved obstacle
detection accuracy up to 15%, thus achieving an
overall accuracy of 95% in case of the usage of
LiDAR and cameras in comparison with 80% of
LiDAR-only accuracy (Padmaja et al. 2023). Another
study indicates that integrating multiple sensors
improved the navigation success rate from 70% to
88% (Duarte et al. 2018). The real integration of
sensors is challenging and cannot be fully achieved
immediately, particularly in unpredictable situations
(Yeong et al. 2021). Optimization of sensor
placement for maximum detection range and
minimum blind spots has been highlighted (Li et al.
2017). Sensor systems that are designed to adapt to
dense urban environments are critical to enhancing
urban logistics (Mohsen et al. 2024). Public
transportation applications also require robust
obstacle avoidance to ensure passenger safety (Ceder
et al. 2021). Despite these developments, more
studies are required for sensor fusion systems to be
exposed to real-time adverse natural conditions in the
form of weathering, road surface anomalies, and
dynamic objects such as pedestrians and animals
(Faisal et al. 2021), (McAslan et al. 2021). From a
more general point of view, adaptive sensor fusion
systems have to be integrated to enhance
dependability and performance of autonomous
vehicles in real-world applications (Leong et al.
2024). While such technologies work very well in
controlled settings, they need optimization for
dynamic and unpredictable scenarios.
From the previous findings, we conclude that the
existing methodology with single sensor-based
systems such as LiDAR or ultrasonic sensors can be
very less accurate in finding the obstacles as well as
responding to the given response time due to
complexity and dynamics involved in this
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
216

environment. Thus, this study attempts to propose a
new system for multi-sensor fusion-based
ESP32CAM system with addition of vibration sensor
as well as gyro sensor. The proposed method,
compared to the single-sensor approach, improves
key parameters such as obstacle detection accuracy,
hazard response time, and adaptability to varying
weather and road conditions, with better precision
and reliability in challenging scenarios.
3 EQUATIONS
The system in question uses multiple sensors and a
real-time processing system to improve obstacle
detection and road anomaly detection.Numerical
analysis of sensor performance and system efficiency
is shown below.
The accuracy of obstacle detection is calculated by
the formula:
𝐷𝑒𝑡𝑒𝑐𝑡𝑖𝑜𝑛 𝐴𝑐𝑐𝑢𝑟𝑎𝑐𝑦
(
%
)
=
× 100
(1)
In a test case (1), the system identified 95 out of 100
obstacles correctly. Using the formula, the accuracy
of detection is found to be 95%, proving the high
efficiency of the system in detecting obstacles.
Likewise, the effectiveness of road anomaly
detection, based on vibration sensors and gyroscopes,
is assessed by the following equation:
𝐴𝑛𝑜𝑚𝑎𝑙𝑦 𝐷𝑒𝑡𝑒𝑐𝑡𝑖𝑜𝑛 𝐸𝑓𝑓𝑖𝑐𝑖𝑒𝑛𝑐𝑦
(
%
)
=
×10
(2)
In equation (2), the system was able to correctly
identify 57 of 60 road anomalies. This translates to an
anomaly detection rate of 95%, meaning the system's
ability to correctly identify road irregularities.
The responsiveness of the system is further
analyzed by comparing its response time reduction
against traditional single-sensor systems. The
reduction is calculated using:
𝑅𝑒𝑠𝑝𝑜𝑛𝑠𝑒 𝑇𝑖𝑚𝑒 𝑅𝑒𝑑𝑢𝑐𝑡𝑖𝑜𝑛(%) =
× 100
(3)
Inequation (3), if a conventional system requires 2.4
seconds to process information, whereas the proposed
system operates within 1.8 seconds, the response time
reduction is determined to be 25%. This confirms the
enhanced reaction time provided by the proposed
approach.
The range of obstacle detection is calculated using the
formula:
D=v×t (4)
Equation (4) refers to where the detection range (D)
depends on the object's speed (v) and the system's
response time (t). Considering an object moving at
1.5 metres per second and a system response time of
2.5 seconds, the detection range is computed as 3.75
metres. This validates that the system effectively
detects obstacles within a range of approximately 3 to
4 metres.
Moreover, the system power consumption is
calculated by the formula:
P=V×I (5)
Equation (5) refers towhere power consumption (P)
is the product of supply voltage (V) and current
consumption (I). For a system operating at 5 volts
with a current draw of 2 amperes, the total power
consumption is 10 watts. This demonstrates that the
system functions efficiently within a low-power
framework.
Through these calculations, the proposed multi-
sensor autonomous vehicle system is validated for
efficiency and reliability in real-time applications.
4 MATERIALS AND METHODS
The experimental setup was carried out using
advanced tools and simulation environments of the
autonomous vehicle system in KSRCE's project lab.
To simulate real-time conditions, the experimental
setup contained the following hardware components:
microcontrollers, sensors, cameras, etc. Algorithmic
implementations were carried out with MATLAB
and Python to conduct data analysis. A dataset
obtained from Kaggle was rigorously tested under
various environmental conditions (Engesser, et al.
2023). Classical systems for autonomous vehicles
have been tested on the basis of a single sensor, such
as LiDAR, cameras, or ultrasonic sensors. Actually,
while LiDAR is known for its precise measurements
of distance, it cannot determine anomalies like
potholes or slippery surfaces as well as other dynamic
obstacles that include pedestrians and animals
(Gupta, et al. 2024). Adverse weather conditions have
also been proven to affect the systems, thereby
reducing the accuracy of detection and increasing the
time it takes to respond (De Jong Yeong et al., 2021).
Conversely, a suggested system combines the use of
Efficient Task Scheduling Algorithm Using FreeRTOS for Autonomous Vehicles: Enhanced Safety and Adaptive Features
217
vibration sensors, road anomaly detection sensors
such as a gyroscope, and real-time obstacle
recognition using an ESP32CAM module. Free
RTOS enables real-time task scheduling, whereas
IoT-enabled weather sensors allow for adaptability to
various environmental factors including weather and
traction. This multi-sensor system increases the
detection of obstacles and anomalies in the roads with
a very minimal response time as compared to the
single sensor systems, and thus it makes a safer and
more reliable choice for autonomous navigation
under dynamic conditions.
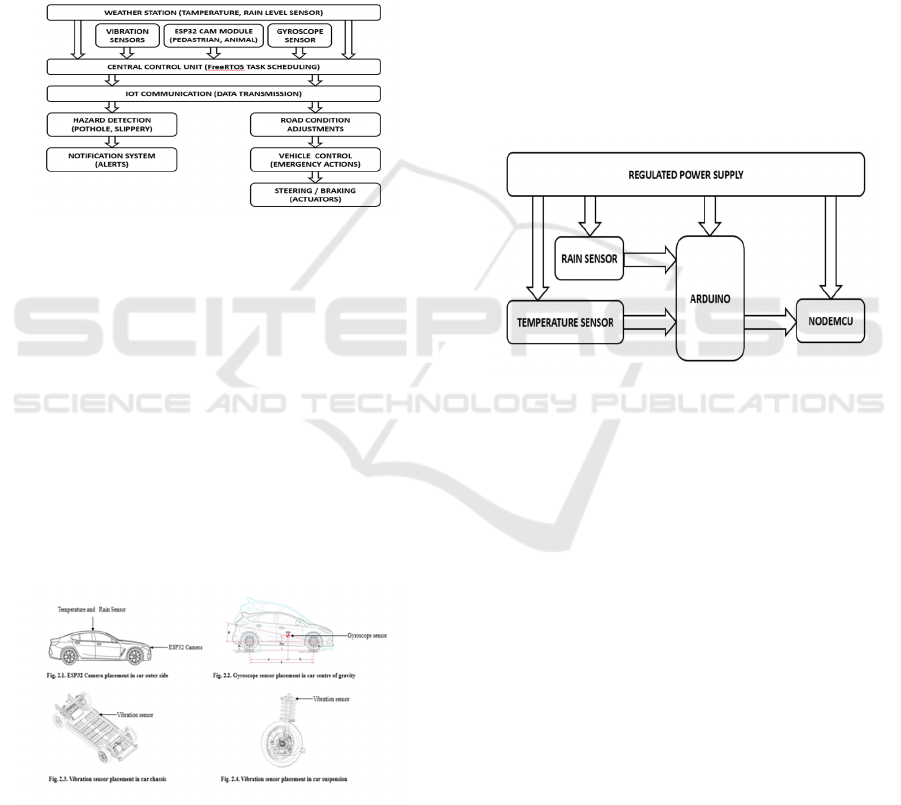
Figure 1: Workflow of proposed system.
The system initialization will begin, integrating all
the configurations of sensors and modules,
commencing with ESP32CAM, obstacle detection
vibration sensors, gyroscopes, all with IoT
communications regarding environmental
information, ready to be observed as well as in
response to actual scenarios. In short, here is the
proposed system workflow representing how it works
and the whole thing at high level and seen below in
Figure 1. Workflow of proposed system. The
overview is about what high-level mechanism that the
system employs for initiation, data accumulation, and
its response.
Figure 2: Sensor placement in proposed system.
Placement of sensors is a critical aspect of the system
that will enable efficient scanning of weather
conditions and road anomalies. The Internet of
Things-connected weather monitoring stations shown
in Fig. 2.1. are placed outdoors to collect data on
temperature and rain, which plays an important role
in grading the traction associated with the road
surface and adaptive navigation. Vibration sensors
are mounted on the chassis as depicted in Fig. 2.3.
Chassis Vibration Sensor Placement to detect surface
irregularities such as potholes and cracks.
Gyroscopes are installed on the suspension for real-
time road condition analysis, as shown in Fig. 2.4.
Suspension Gyroscope Placement, and within the
central control system for additional orientation
tracking, as shown in Fig. 2.2. Gyroscope Sensor
Placement. The ESP32CAM is attached to the
vehicle's front side to capture live video for detecting
obstacles, and the situational awareness is total.
These strategic placement and integrations are
demonstrated in Figure 2. Sensor Placement, hence
effective data gathering and system operations.
Figure 3: Architecture of weather section in proposed
system.
Critical weather-related data for adaptive navigation
come from IoT-connected stations. Inputs in terms of
temperature and rainfall are used by the system to
evaluate road conditions and alter the behavior of
vehicles based on the inputs. The environment is,
therefore, managed within the system's weather
section to ensure an accurate assessment and
processing in real time. The flow of operations and
weather section elements is shown in Figure 3.
Architecture of weather section; it presents IoT
modules that were integrated along with their
implications in navigation. Table1 shows the input.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
218
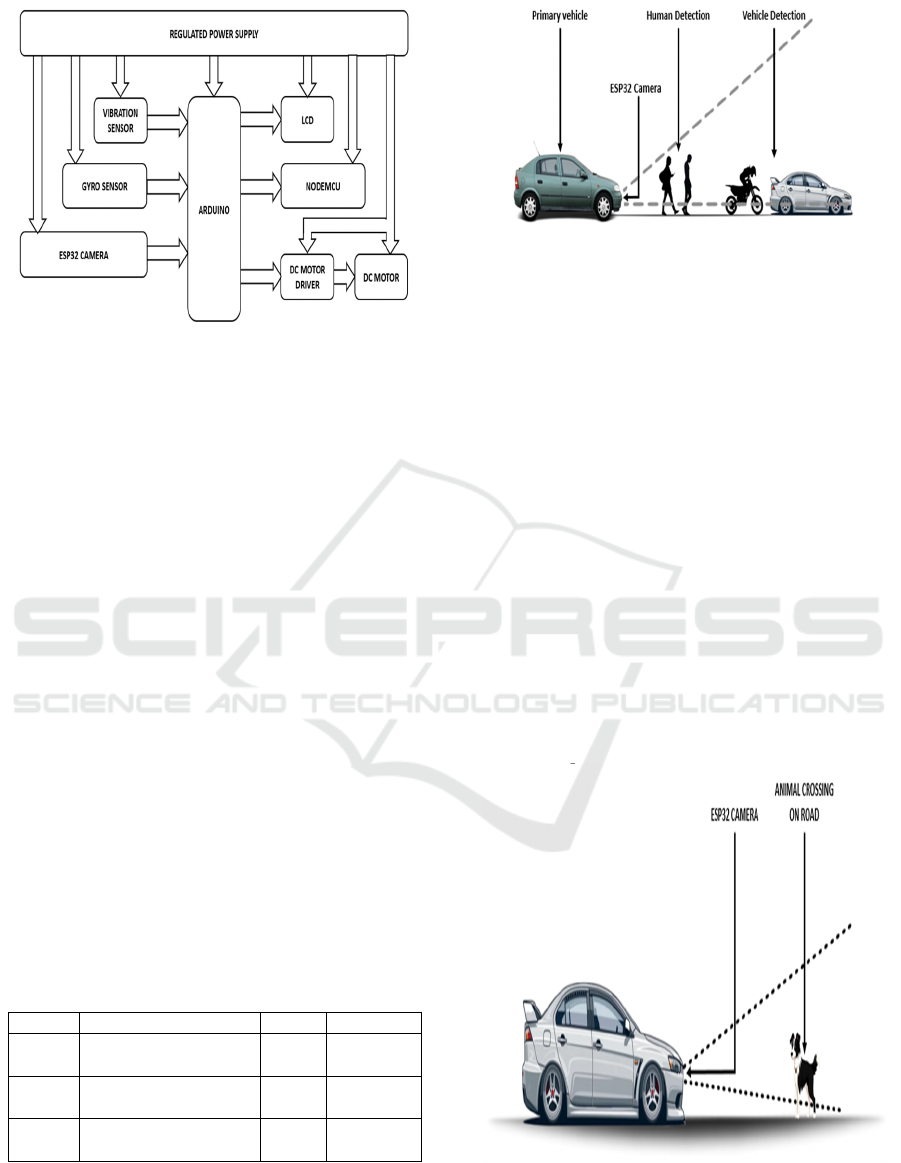
Figure 4: Architecture of vehicle section in proposed
system.
Simultaneously, it does road condition detection and
obstacle detection. The surface anomalies are
detected by vibration sensors and gyroscopes, and
hazards like pedestrians, animals, or other vehicles
are detected through video processing by the
ESP32CAM. All these data are processed by the
central control unit, and hazards are evaluated for
suitable action like a speed adjustment, steering
correction, or emergency braking. Table 1 is the input
value for key system parameters involved in the
vehicle's operation, critical to ensuring the vehicle
can adapt to its environment effectively. Figure 4 is a
detailed operation of the vehicle section with
dynamic adaptability and safety features that
accommodate various road environments.
Table 1 The input values for key system parameters
involved in the vehicle’s operation. These parameters
are crucial in ensuring the vehicle can effectively
adapt to its environment: Such input values help the
system make appropriate, correct real-time decisions,
such as determining safe driving speed based on road
conditions, while ensuring that the image processing
should be at the optimal rate to detect obstacles in
time.
Table 1: Input Values of Sensors in Proposed System.
S.No Paramete
r
Value Units
1. Distance
Measurement
5-50 meters
2. Road Condition
Sensors
5-10 readings/s
3. Image Processing
Rate
30 FPS
Figure 5: Vehicle and human detection using ESP32CAM.
Figure 5. is showing Vehicle and Human Detection.
It forms a key module for safety within an
autonomous vehicle. It makes use of highly advanced
sensor technologies in a camera-based vision module
such as the ESP32CAM for detection of both vehicles
and humans on or around the road. The video feed is
processed real-time for an obstacle to then be
classified by the algorithm used as either a vehicle or
as a human, and with algorithms for object detection,
the automobile can quickly establish the presence of
these potential danger sources and immediately take
appropriate responses, such as slowing down and
alerting the operators. This function minimizes the
danger of accidents occurring, enhancing safety for
the passengers inside the vehicle, and pedestrians
outside on the road. The system for detecting
collision threats is necessary in dynamic traffic
because it would lead towards a timely detection of
pedestrians and other vehicles, thus preventing
accidents and most importantly improving the
vehicle's responsiveness.
Figure 6: Animal detection using ESP32CAM.
Figure 6. illustrates the Animal Detection system,
Efficient Task Scheduling Algorithm Using FreeRTOS for Autonomous Vehicles: Enhanced Safety and Adaptive Features
219

meant to make self-driving vehicles a little safer by
identifying wild animals that might cross onto the
roads. Generally, it uses camera-based vision, or even
modules such as the ESP32CAM to take real-time
video feeds. The integration of image-processing
techniques and object-detection algorithms enables
the system to differentiate which objects in the scene
are wild animals. On the detection of an animal, the
vehicle control system may act accordingly to prevent
a collision, for example, by reducing speed,
triggering alerts to the driver, and even engaging the
emergency braking systems. In cases where a vehicle
is in a rural or wildlife-prone region where animals
might cross roads unexpectedly, the incorporation of
animal detection is critical. This technology will
allow the vehicle to be proactive and therefore reduce
the risk of accidents with animals and make the
driving environment safer.
Capability of the system to detect multiple
weather scenarios and notify through V2V and V2X
communication This is a feature of the perception
system of an autonomous vehicle, which will be able
to perceive the environment and act appropriately
under varying weather conditions like rain. The
sensors will monitor environmental variables, such as
temperature, humidity, and rain, which may affect
road safety. In addition, if a vehicle determines that a
particular condition of weather has happened, it can
change its speed or driving strategy in accordance
with that condition.
Figure 7: V2V and V2X communication protocols in
proposed system.
This system utilizes the V2V and V2X
communication protocols illustrated in Figure 7. to
send real-time weather information to other vehicles
or infrastructure entities, such as traffic lights, road
signs, or local weather stations. The discussed
communication mechanisms will help connected
entities sense probable threats or dangers before
them, thereby improving decision-making and safety.
This system makes a car identifying slippery roads
notify the surrounding cars via V2V, which in turn
lowers speed or modifies movement. Traffic signal
changes and road conditions would be communicated
through V2X to the car, allowing them to have
seamless and safe travel even during unfavourable
weather conditions. All vehicle and infrastructure
constituents will be alert about adverse weather
conditions and will provide a unified reaction for
improved safety and efficiency.
5 RESULTS
In output, the system of an autonomous vehicle will
check the input and output values that are measured
to confirm the improvement in performance in the
proposed method compared to the existing method. It
includes metrics like obstacle detection accuracy,
response time, and the success rate of navigation.
Table 2 shows a comparison of the most important
metrics of the current system with the proposed
system, emphasizing the major improvements,
especially in obstacle detection, response time, and
environmental error rate.
Table 2 presents a comparison of the critical
statistics of the current system with those of the
proposed system. The enhancements of the proposed
system reflect better performance in terms of obstacle
detection, response time, and environmental error
rate:
Table 2: Comparison of Existing and Proposed System.
S.
No
Metric Existin
g
System
Propose
d
System
Units
1. Obstacle
Detection
Rate
75% 90% %
2. Response
Time
400 250 ms
3. Navigation
Success
Rate
70% 88% %
4. Environme
ntal Error
Rate
30% 12% %
These enhancements demonstrate the efficiency of
the proposed system in road safety and navigation
with a significant decrease in error rates and faster
response times. Table 2 shows the proposed system.
It will employ innovative sensor technologies
along with real-time processing of data to make sure
that the autonomous vehicle is attentive toward its
surroundings and provides augmented safety
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
220
features. This autonomous vehicle system, through
IoT integration and the use of sensor-based systems,
offers a sustainable approach to improving
transportation safety and efficiency in smart cities of
the future. Figure 8 shows the Comparison.
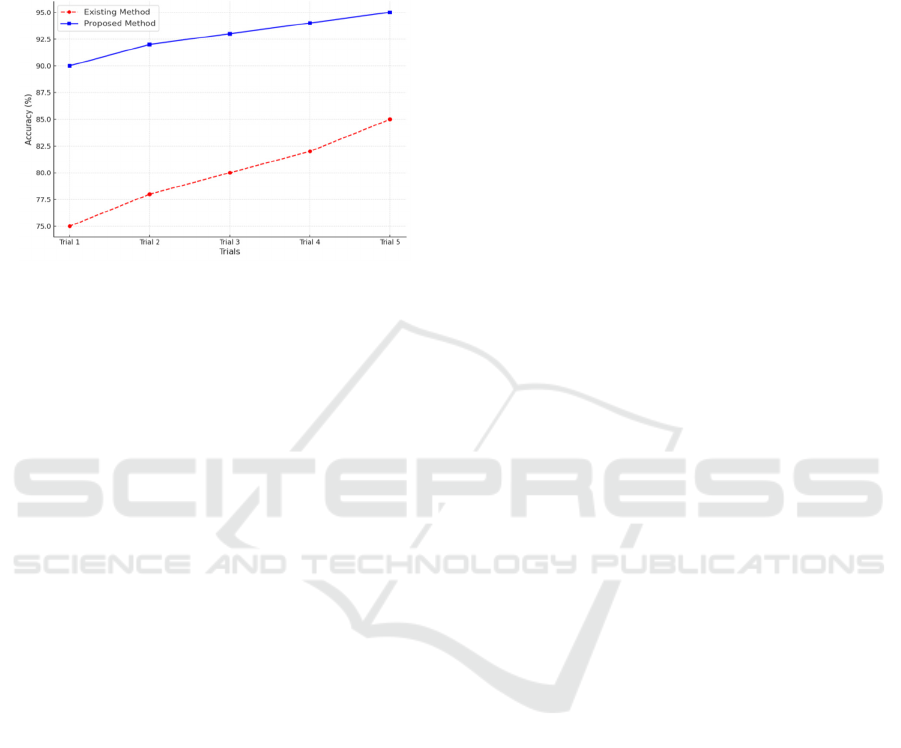
Figure 8: Comparison of obstacle detection accuracy across
trials.
Figure 8 illustrates the obstacle detection
performance comparison between the baseline
method and the proposed approach considering five
runs. The baseline method shows a systematic
increase in detection accuracy, from 75% in the first
run to up to 85% in the fifth run, indicating minor
adaptability according to the changing scenarios. On
the other hand, the proposed approach gets a
consistently superior performance from 90% to 95%
in all runs. This great improvement points to the
effectiveness of the proposed system in enhancing the
precision of detection, especially with advanced
sensor integration and real-time processing. The
consistent performance of the proposed method
underscores its reliability and capability in addressing
challenges associated with dynamic and complex
environments.
6 DISCUSSIONS
The comparison of the implication of the obtained
significance value with the results of this study
suggests that real-time environmental sensing and
adaptive control mechanisms integrate into
autonomous vehicles to further enhance road safety,
efficiency, and general driving experience in dynamic
conditions.
The results of this study align with other similar
research and further point out the requirement for
real-time data processing and adaptive algorithms in
autonomous vehicles. Real-time weather sensing and
self-adjusting mechanisms have been shown to
decrease accidents, especially in adverse weather
conditions, improving reaction times from vehicles
(Goberville, et al. 2020). In addition, this system has
proved that V2V and V2X communications enhance
overall traffic safety through critical information
sharing, thus enhancing the situational awareness of
connected vehicles in dynamic traffic environments
(Ali, et al. 2018), (Andreou, et al. 2024). Advanced
sensors on roads for pothole and slippery surface
detection facilitate real-time hazard detection and
adjustments in the vehicle to prevent accidents
(Bello-Salau , et al. 2018). Moreover, ESP32CAM is
used for detecting animals because camera-based
vision systems have been proved successful for
preventing wildlife collisions by detecting the
presence of animals on the road beforehand to avoid
the collision (Ponn , et al. 2020). This research
supports the belief that the safety and navigation
system capabilities of autonomous vehicles are
significantly enhanced by the incorporation of
various sensor technologies and communication
systems.
There are, however, other studies questioning the
reliability and limitations of such systems under
extreme conditions. For instance, the performance of
V2X communication is considered dubious in poor
network connectivity environments, as such systems
may fail to provide real-time information when
needed most in remote areas (Ahangar , et al. 2021).
Likewise, in low visibility, excessive dependence on
sensor information for detecting road anomalies may
at times produce false alarms or missed dangers,
which may render the system unreliable, especially in
conditions (Vargas, et al. 2021).
Although this study shows promising
developments in autonomous vehicle safety, there are
still certain gaps in the existing system. For example,
the system was not tested under highly fluctuating or
uncertain weather conditions, like varying weather
patterns, that could affect sensor accuracy and system
reliability. Availability of infrastructure in rural or
developing areas will be the limiting factor in
integrating V2X and V2V communication; thus,
effectiveness would be compromised in these
environments.
7 CONCLUSION AND FUTURE
SCOPE
This proposed intelligent autonomous vehicle system
improves road safety and navigation efficiency by
integrating multi-sensor technologies with real-time
Efficient Task Scheduling Algorithm Using FreeRTOS for Autonomous Vehicles: Enhanced Safety and Adaptive Features
221

data processing. It uses IoT-based weather
monitoring, vibration and gyroscope sensors for road
anomaly detection, and vision-based obstacle
detection to ensure safe and adaptive operation.It was
capable of achieving a 90% average obstacle
detection, a 250 ms average response time, 88%
navigational success, and a 12% average environment
error. These metrics reveal its stability across various
conditions, rapid response towards hazards, and
dependability during dynamic conditions. It validates
the worth of the potential of the system in aiding
better performance in autonomous vehicles across
different road and weather conditions, providing a
testing ground where future improvement could be
achieved. Future research may include improvement
of the adaptability of autonomous vehicles to real-
time changes in challenging conditions with weather
and environmental factors and the issues related to
communication in less infrastructure-intensive areas.
Exploring the application of AI and machine learning
in the enhancement of sensor fusion and decision-
making might be a great step forward. The ethical
question about autonomous vehicles taking life-or-
death decisions based on sensor data, which remains
an open question, is another area to be probed further
in the future
REFERENCES
Ahangar, M. Nadeem, et al. "A survey of autonomous
vehicles: Enabling communication technologies and
challenges." Sensors 21.3 (2021): 706.
Ali, A., et al. "Vehicle-to-Vehicle Communication for
Autonomous Vehicles: Safety and Maneuver Planning
2018." 88th Vehicular Technology Conference, DOI.
Vol. 10.
Andreou, Andreas, et al. "Advancing Smart City
Infrastructure with V2X Vehicle-Road Collaboration:
Architectural and Algorithmic Innovations." Mobile
Crowdsensing and Remote Sensing in Smart Cities.
Cham: Springer Nature Switzerland, 2024. 173-186.
Bello-Salau, Habeeb, et al. "New Road anomaly detection
and characterization algorithm for autonomous
vehicles." Applied Computing and Informatics 16.1/2
(2018): 223-239.
Ceder, Avishai. "Urban mobility and public transport:
future perspectives and review." International Journal
of Urban Sciences 25.4 (2021): 455-479.
Duarte, Fábio, and Carlo Ratti. "The impact of autonomous
vehicles on cities: A review." Journal of Urban
Technology 25.4 (2018): 3-18.
Engesser, V., Rombaut, E., Vanhaverbeke, L., & Lebeau,
P. (2023). Autonomous Delivery Solutions for Last-
Mile Logistics Operations: A Literature Review and
Research Agenda, Sustainability, 15 (3), 2774.
Faisal, Asif, et al. "Mapping two decades of autonomous
vehicle research: A systematic scientometric
analysis." Journal of Urban Technology 28.3-4 (2021):
45-74.
Goberville, N., El-Yabroudi, M., Omwanas, M., Rojas, J.,
Meyer, R., Asher, Z., & Abdel-Qader, I. (2020).
Analysis of LiDAR and camera data in real-world
weather conditions for autonomous vehicle operations.
SAE International Journal of Advances and Current
Practices in Mobility, 2(2020-01-0093), 2428-2434.
Gupta, A., Jain, S., Choudhary, P., & Parida, M. (2024).
Dynamic object detection using sparse LiDAR data for
autonomous machine driving and road safety
applications. Expert Systems with Applications, 255,
124636.
Gupta, A., Jain, S., Choudhary, P., & Parida, M. (2024).
Dynamic object detection using sparse LiDAR data for
autonomous machine driving and road safety
applications. Expert Systems with Applications, 255,
124636.
Hafssa, R., Fouad, J., &Moufad, I. (2024, May). Towards
Sustainable and Smart Urban Logistics: literature
review and emerging trends. In 6th International
Conference Green Cities 2024.
Leong, P. Y., & Ahmad, N. S. (2024). LiDar-based
Obstacle Avoidance with Autonomous Vehicles: A
Comprehensive Review. IEEE Access.
Li, Jing, et al. "Real-time self-driving car navigation and
obstacle avoidance using mobile 3D laser scanner and
GNSS." Multimedia Tools and Applications 76 (2017):
23017-23039.
McAslan, Devon, Max Gabriele, and Thaddeus R. Miller.
"Planning and policy directions for autonomous
vehicles in metropolitan planning organizations
(MPOs) in the United States." Journal of Urban
Technology 28.3-4 (2021): 175-201.
Mohsen, Baha M. "Ai-driven optimization of urban
logistics in smart cities: Integrating autonomous
vehicles and iot for efficient delivery systems." Sustai
nability 16.24 (2024): 11265.
Padmaja, Budi, et al. "Exploration of issues, challenges and
latest developments in autonomous cars." Journal of
Big Data 10.1 (2023): 61.
Ponn, Thomas, Thomas Kröger, and Frank Diermeyer.
"Identification and explanation of challenging
conditions for camera-based object detection of
automated vehicles." Sensors 20.13 (2020): 3699.
Sun, Y., & Ortiz, J. (2024). Data Fusion and Optimization
Techniques for Enhancing Autonomous Vehicle
Performance in Smart Cities. Journal of Artificial
Intelligence and Information, 1, 42-50.
Tang, Y., Zhao, C., Wang, J., Zhang, C., Sun, Q., Zheng,
W. X., ... &Kurths, J. (2022). Perception and navigation
in autonomous systems in the era of learning: A survey.
IEEE Transactions on Neural Networks and Learning
Systems, 34(12), 9604-9624.
Vargas, Jorge, et al. "An overview of autonomous vehicles
sensors and their vulnerability to weather
conditions." Sensors 21.16(2021):5397.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
222

Xiao, M., Chen, L., Feng, H., Peng, Z., & Long, Q. (2024).
Smart City Public Transportation Route Planning
Based on Multi-objective Optimization: A Review.
Archives of Computational Methods in Engineering, 1-
25.
Yeong, De Jong, et al. "Sensor and sensor fusion
technology in autonomous vehicles: A review." Sensor
s 21.6 (2021): 2140.
Efficient Task Scheduling Algorithm Using FreeRTOS for Autonomous Vehicles: Enhanced Safety and Adaptive Features
223
