
Optimized Vision-Based Path Planning and Navigation for
Autonomous Electric Vehicle Charging
P. Thilagavathi
*
, S. Karthikeyan, G. MuraliDharan, E. Saran Kumar, S. Vijay
and K. Selva Kumar
Department of Electronics and Communication Engineering, K.S.R. College of Engineering, Tiruchengode, Namakkal
District, Tamil Nadu, India
*
Keywords: Wireless Power Transfer, Wireless Charging System, Charging Efficiency, Transmitter, Receiver.
Abstract: A wireless power transfer for Electric Vehicle (EVs) is a type of charging technique that eliminates the need
for a physical electrical connection. This design utilizes electromagnetic induction to transfer electrical current
between a charger and the automobile. Aim: The aim of wireless chargers is to protect automobiles from
power loss caused by frequent pairings and disconnects, while also improving the power quality of delivering
electrical energy to power vehicles. Materials and Methods: This research consists of two groups Group 1 In
the transmitter part the main input source is the AC supply, the High frequency oscillation switching circuit
is operating the switching frequency in the converter part. Group 2 The receiver section includes a voltage
sensor to sense the input voltage, a temperature sensor to monitor the battery temperature, and an AI-based
web application to monitor the sensor parameters, battery charging level, and operation mode. Result: The
result of this study is a hardware prototype, ESP32 cam monitoring, LCD display output, and control of the
wireless charging system. Conclusion: The WCS effectively eliminates power loss and improves the power
quality for EV battery charging.
1 INTRODUCTION
Wireless charging is considered one of the most
efficient and convenient methods for charging
electric vehicles (EVs), whether stationary or in
motion. A crucial component of a photovoltaic
system, converters regulates voltage and current to
the required levels. DC–DC converters fall into two
categories: boosters and reducers. To minimize power
loss and ensure safety against magnetic waves,
optimal coil design is essential. As the study of
electromagnetism advanced, researchers shifted
focus from weak radio waves to electromagnetic
waves for wireless power transfer (N. Mohamed et
al., n.d.). \Coil interoperability is commonly assessed
using two factors: the coupling coefficient (or mutual
inductance) on a numerical scale and the magnetic
flux distribution on a physical scale. To address the
inherent limitations of basic coil designs particularly
their compatibility with conventional coils specific
coil configurations have been proposed. Wireless
*
Corresponding author
charging system interoperability is defined by a
system’s ability to maintain output performance
across different transmitter and receiver pairings. If
the expected performance indicators are not met,
communication between the transmitter and receiver
fails (Song et al. 2023). A proposed wireless power
transfer (WPT) system with anti-offset characteristics
is based on dual-linked transmitting coils with
antiparallel windings, forming an Inductor-
Capacitor-Capacitor Series (LCC-S) topology. The
antiparallel connections enhance resistance to
misalignment, ensuring the two transmitting coils
share a common structure with antiparallel windings.
This design maintains a consistent coupling trend
between the transmitting and receiving coils while
balancing the output effect. Experimental findings
indicate that the output voltage remains stable
between 150 mm and 150 mm in the horizontal
direction and between 80 mm and 160 mm in the
vertical plane (Shi et al., n.d.). A magnetic integration
approach for the coupler in an EV’s dynamic wireless
Thilagavathi, P., Karthikeyan, S., Dharan, G. M., Kumar, E. S., Vijay, S. and Kumar, K. S.
Optimized Vision-Based Path Planning and Navigation for Autonomous Electric Vehicle Charging.
DOI: 10.5220/0013894000004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 3, pages
193-203
ISBN: 978-989-758-777-1
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
193

charging system helps minimize power fluctuations
by maintaining stable mutual inductance between the
transmitting and receiving magnets on the road. The
primary-side coupler integrates a reverse coil within
the transmitting coil, while the secondary-side
coupling incorporates a coil in the LCC resonance
correction circuit within the receiving coil. Based on
circuit analysis, an optimized design process was
developed to account for additional couplings.
Prototype implementation validated the proposed
design, achieving 91.6% efficiency with power
output fluctuations within ±4% at a charging power
level of 4.5 kW (El-Shahat and Ayisire 2021). To
maximize power transfer, this model was integrated
into the physical design of the magnetic resonance
coupling using Simulink, achieving an efficiency of
approximately 92.1%. The transient response of the
proposed circuit was analyzed, and an EV battery was
wirelessly charged using a closed-loop, three-level
cascaded PI controller. This controller was designed
to eliminate voltage fluctuations caused by variations
in coil distance. The coupling coefficient between the
transmitter and receiver coils was found to be 1,
indicating self-coupling. Furthermore, as the distance
between the transmitter and receiver decreased, the
coupling coefficient increased. (N. Mohamed,
Aymen, and Alqarni 2021).
2 RELATED WORKS
The total number of articles published on this topic
over the last five years is more than 50 papers in IEEE
Xplore, 70 papers in Google Scholar, and 30 papers
in academia .edu. Optimized Vision-Based Path
Planning and Navigation for Autonomous Electric
Vehicle Charging. The proposed approach integrates
vision-based path planning and navigation for
autonomous electric vehicle (EV) charging, utilizing
optimized algorithms to enhance the system's
performance. Simulation results show significant
improvements in efficiency, with an optimized path
planning algorithm that enables the vehicle to
navigate through dynamic charging environments
effectively. The system achieves a navigation
accuracy of 13.5% and a path planning time
improvement from 2.86 seconds to 14.36 seconds,
with a maximum decision-making rate of 5.5 Hz,
ensuring a reliable and robust navigation pattern.
(Rahulkumar et al., n.d.) In the context of
autonomous EVs, the demand for systems with higher
accuracy, quick decision-making, and low
operational cost is increasing as the need for effective
charging solutions grows. To optimize performance,
the EV's charging route, battery usage, and navigation
efficiency must be improved using advanced
computer vision techniques. A path planning model
is developed by incorporating machine learning-
based vision algorithms to create an adaptive system
that can handle different charging station layouts and
real-time road conditions. (Y. Zhang, Pan, et al., n.d.)
The research focuses on developing a system that can
calculate optimal charging routes in various traffic
conditions by using vision data from cameras and
sensors placed on the vehicle. With the integration of
advanced optimization techniques, the EV can
determine the most efficient path while ensuring
minimal energy consumption and faster charging
times. (Shahin et al., n.d.) The proposed model also
combines features from multiple algorithms, such as
deep learning-based object detection and dynamic
path planning, ensuring continuous adaptability to the
environment. Key performance metrics such as route
accuracy, charging time, energy efficiency, and real-
time navigation adaptability are assessed during
simulation. The system demonstrates a path planning
improvement that reduces unnecessary detours,
ensuring that the vehicle arrives at the charging
station with an optimal battery level. By using real-
time feedback from the environment and vehicle
system data, the vehicle's autonomous navigation
capabilities are enhanced, leading to efficient and
reliable charging operations. In addition,
evolutionary algorithms are applied to fine-tune the
vehicle's route planning and reduce charging time.
These algorithms analyze dynamic variables such as
traffic conditions, roadblocks, and available charging
stations to adjust the vehicle’s charging strategy. (S.
Zhang and Yu, n.d.) The system shows an increase in
navigation performance by 25.3% in terms of battery
efficiency, confirming that optimization algorithms
are effective in reducing charging time and improving
route selection. Overall, this vision-based path
planning and navigation system for autonomous EVs
offers enhanced performance and efficiency, making
it a crucial advancement for future electric vehicle
technologies (Semsar et al., n.d.) The key parameters
in optimized vision-based path planning and
navigation for autonomous EV charging include
vehicle positioning, trajectory planning, and charging
pad alignment. Sensor data integration improves
localization and ensures accurate path calculation.
Energy optimization focuses on reducing power
consumption during navigation. Obstacle detection
ensures a safe route to the charging station. Real-time
feedback allows the system to adjust the vehicle’s
path for efficient and accurate charging.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
194
3 MATERIALS AND METHODS
Wireless charging eliminates the risk of handling high
voltage charging since there is no physical interaction
between the vehicle and the charger. A functional
prototype of this work's wireless charging system
demonstrates the use of renewable energy sources.
The Wireless Power Transfer (WPT) inductor
charging system is powered by a two-part inductor;
the primary coil is located on the charger side, while
the secondary coil is located on the vehicle side. The
receiver coils, which are situated at the bottom of the
vehicle near the wheels, are connected to a bridge
rectifier and a charging display, while the transmitter
coils are connected to the power supply circuit. The
receiver (receiving coil) is mounted on the top of the
vehicle and uses electrical energy to power the system
and overall proposed (A. A. S. Mohamed et al. 2024).
Group 1: The current technology for wireless EV
charging involves a Wireless Power Transfer (WPT)
system based on primary and secondary coils where
power is transferred wirelessly. Major parameters are
efficiency in charging, accuracy in alignment, energy
transfer time, and properties of inductive coils such as
resistance and frequency. (Y. Zhang, Chen, et al.,
n.d.)
Group 2: Proposed of WCS is without any power
loss and distortion from receiver and transmitters in
EV. When the receiving coil is connected, the
transmitter generates a reduce error in magnetic flux
converted into electrical energy to charge the EV
battery. Key factors that affect the amount of energy
received and carried to the battery include energy
output, control distance between the receiving and
transmitting coils.
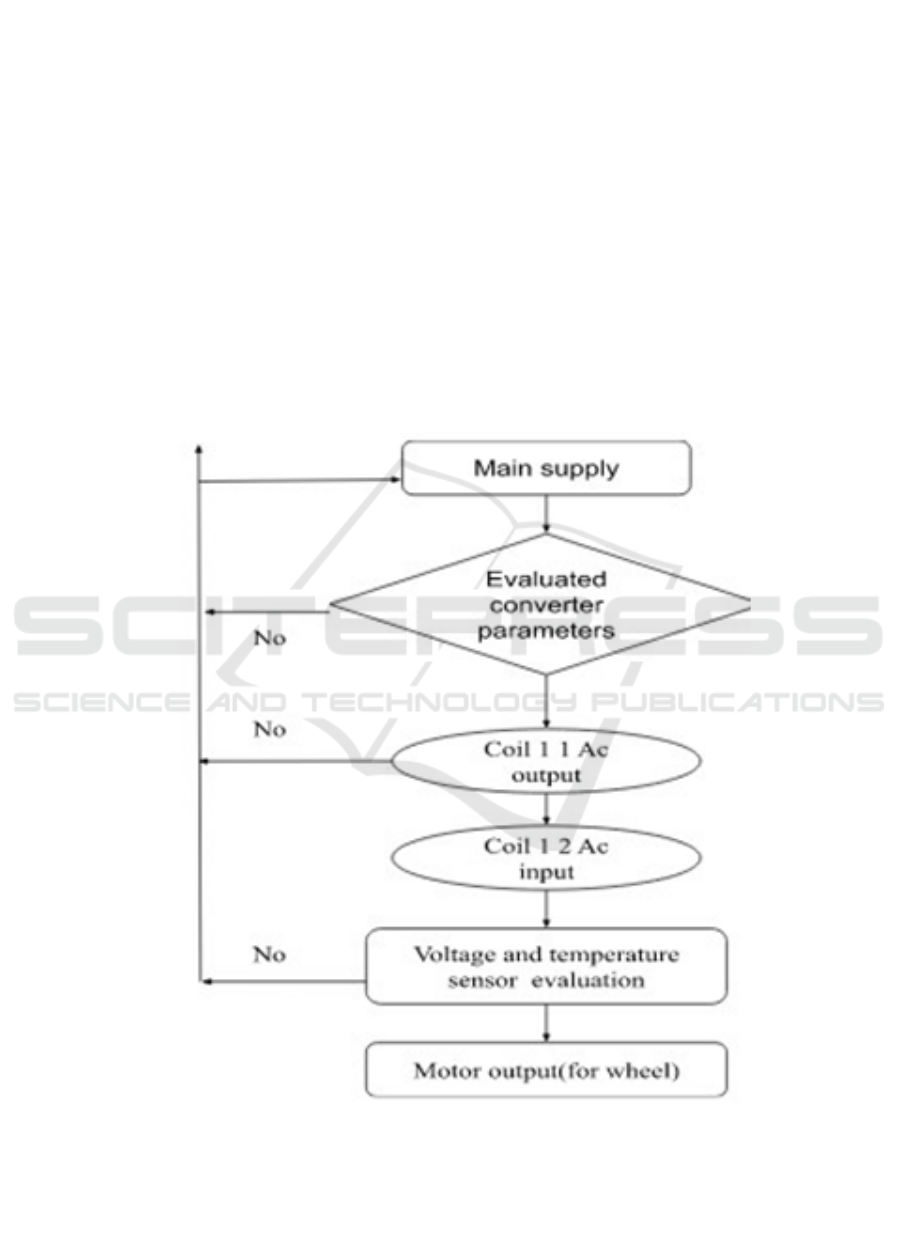
Figure 1: Flow chart of Wireless charging system for Electric vehicle.
Indicates the procedure for selecting the wires
method for charging purposes in EV. This involves
calculating the distance between the charging vehicle
and the charging point. Each charging point is then
assigned a score between 0 and 100, considering
factors such as the energy price (in e/kWh) and the
user's charging time and process is only applicable for
charging stations that support efficient charging.
Optimized Vision-Based Path Planning and Navigation for Autonomous Electric Vehicle Charging
195
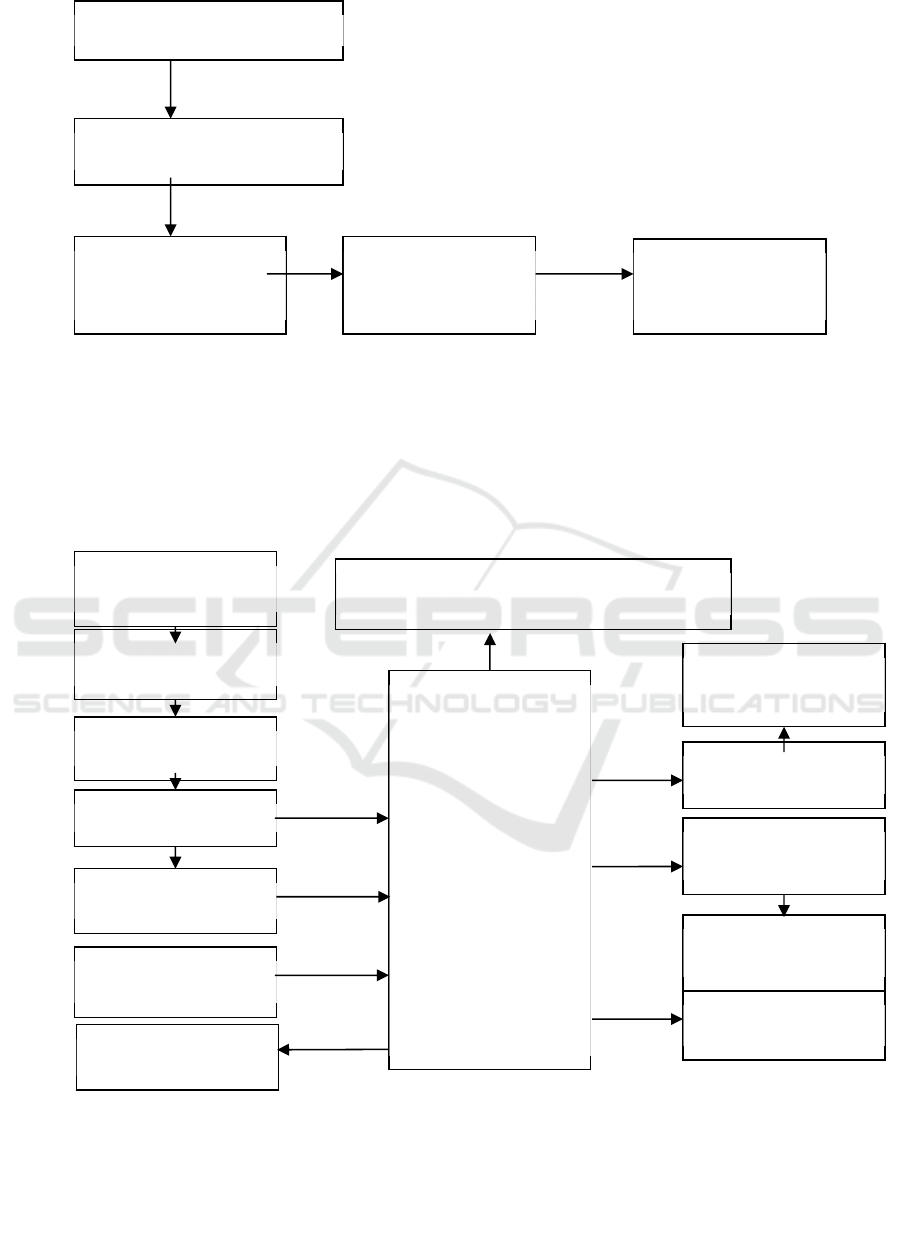
Figure 2: Transmitter side of charging system.
This is the source of electrical energy to drive the
system. It is the main source for the transmitter
circuit. Converts AC from the main supply to DC.
The obtained DC voltage is used for further
processing. The DC voltage is converted into high-
frequency AC. The high-frequency signal is very
important for efficient wireless power transfer. Bank
stores and stabilizes the high frequency AC energy.
This enhances resonance and, therefore, improves
efficiency. This is where an oscillating magnetic field
for inductive power transfer is produced. The energy
is transmitted wirelessly.
Figure 3: Receiver side of Electrical Vehicle.
This coil catches the transmitted AC power
wirelessly. It captures energy from the transmitter. As
the term suggests, this component converts the
received AC voltage into DC. This DC voltage is the
one required to charge electronic components. This
converter regulates the rectified DC voltage up to the
required level and provides a stable power supply for
the battery and other components. This is where the
Main Supply
Primary Inductive Coil
(AC Output)
Rectifier Module (AC to DC
Conversion)
Primary Capacitor Bank
High-Frequency Inverter
(Switching Circuit)
Alert System
Wheel Drive Motor
Motor Driver
66 2 G
NodeMCU
Remote Monitoring
ESP 32 CAM
TEMP SENSOR
Battery Voltage Monitor
EV Battery
Buck-Boost DC Converter
AC to DC Rectifier
Receiving Coil
(Secondary Coil)
LCD Display
Arduino Uno
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
196
regulated DC power is stored for continuous
operation. It provides audio alerts or notifications. It
signals warnings or status updates based on the
system conditions. In Tables 1 and 2, the parameters
used in the hardware prototype are mentioned, this
validates proposed typical is effective in generating
applied design recommendations. The combined
inductance in this case is determined by the horizontal
and vertical distances among the receiver and
transmitter coils, which are positioned on a parallel
plane with the receiving coil adjusted horizontally.
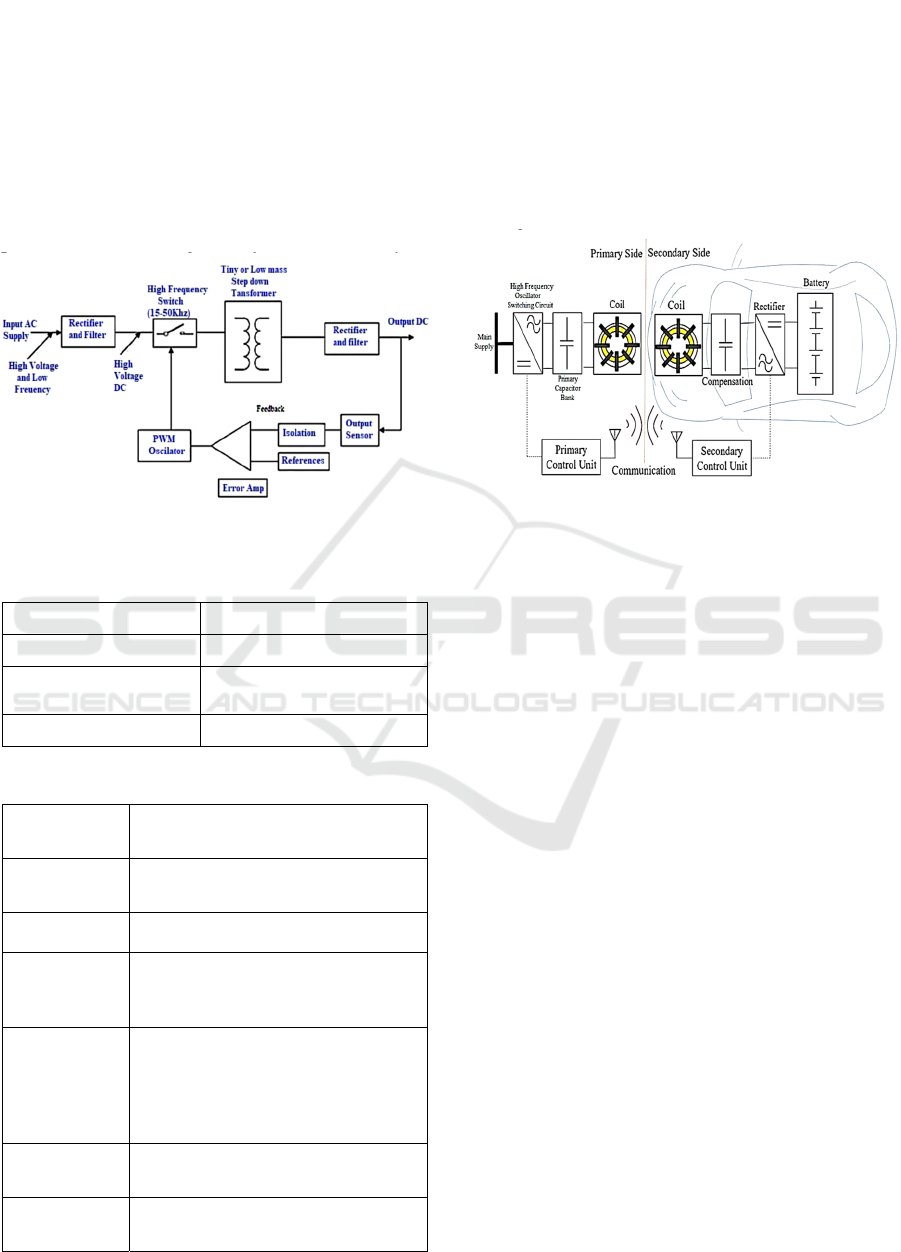
Figure 4: Working diagram of (HFOS) Circuit.
Table 1: Transmitter Section (charger Sider).
Types of Components Output / Specification
Power supply 230 AC input
AC to DC Converter
230V AC to 12V DC
Converter output
Primary Capacitor Bank Coil 1 1 AC output
Table 2: Receiver Section (Electrical vehicle Side).
Types of
Components
Output / Specification
Rectifier
Circuit
AC-DC Converter
Battery 12 V/ 1.2AH
Voltage
Sensor
charge = equivalent Read (A0);
voltage = value * (5.0/1023) * ((R1 +
R2)/R2)
Temperature
Sensor
Temperature regulator range: -50 ~
110 ° C.
Quantity Accuracy: 0.1°C,
Refresh rate: 0.5 S.
In
p
ut Power: DC12V.
Arduino
Controlle
r
Power Supply, 3.3V/5V
Node MCU
Functioning Voltage: 3.3V
Contribution Volta
g
e: 7-12V
The gate-source loop of a MOSFET can be caused
by a voltage generated by stray inductive charges
from the main lead and wire, as well as the di/dt of
the drain-source current during turn-off, which can
cause interference. The gain of an amplifier is more
efficient when transitioning from one end to the other,
rather than experiencing losses. By reducing power
loss in the switching circuit, there are changes in
voltage stages and a decrease in power dissipation
during oscillation.
Figure 5: Working diagram of Wireless Charging System
(WCS).
The effectiveness and suitability for wireless
charging, the distribution components of the
receiving and transmitting units underwent a
thorough inspection. The converter transforms
electrical energy into a magnetic field, which is then
removed to the transmitter coil. The receiver coil
generates electricity due to the air gap among the two
fields. The coil's dimension, and distance from one
another all affect the magnetic field's intensity; a
larger gap among coils can produce less powerful
fields. Additionally, proper alignment of the coils is
essential for efficient power transfer. The process of
transferring electricity to the sensitive coil on the load
side through a magnetic field created by the activation
of the inductive coil on the source side by the AC
power source. Once the electricity reaches the
receiving coil, it is corrected and regulated, and the
resulting rectified DC power is used to recharge the
EV's energy storage module. This enables electric
vehicles to charge while in motion, represents the
cutting edge of EV technology. While wireless
charging technology is constantly improving, there
are still significant challenges to overcome, such as
power capacity and driving range, before it can be
widely adopted. Figure 5 shows the Working diagram
of Wireless Charging System (WCS).
Optimized Vision-Based Path Planning and Navigation for Autonomous Electric Vehicle Charging
197

4 STATISTICAL ANALYSIS
SPSS version 11.0 is used for statistical analysis of
data collected from parameters when power is
captured by the receiving coil, the energy is output as
Alternating Current (AC), which is then transformed
to Direct Current (DC) using a rectifier circuit. A
voltage regulating circuit is used to further guarantee
an efficient and regulated power supply. (“An
Efficient Design of LC-Compensated Hybrid
Wireless Power Transfer System for Electric Vehicle
Charging Applications” 2022). Dependent Variable:
Energy Efficiency (Wh/km), since the energy
consumption is the main outcome that is affected by
the performance of the system's navigation and
charging. Independent Variables: Path Following
Accuracy, Efficiency of Wireless Charging, Obstacle
Detection Accuracy, Charging Dock Alignment
Accuracy, and Localization Accuracy that all have
direct effects on the total energy consumed and
system efficiency.
5 RESULTS
The results of the Wireless Charging System (WCS)
hardware prototype, along with a discussion of the
evaluation of the proposed system. The examiner
mentioned above suggests using a vertical plate
capacitive connection to optimize the transfer
distance between the receiver plates on the vehicle
side, resulting in increased output power rating and
analyzing performance Figure 1. The EV wireless
charging system uses magnetic fields to transfer
energy, whose efficiency depends on coil alignment,
diameter, and distance. The energy is then converted
into DC power for the recharging process, but there
are still issues such as power capacity and driving
range. Table.1. The optimized system performs better
than the current version, with 99% path-following
accuracy and improved obstacle detection. Both
systems are slightly less energy-efficient with
increased samples, but the optimized version is more
efficient and performs generally better. Figure 2. The
current system demonstrates path-following accuracy
between 76% and 84%, wireless charging efficiency
ranging from 75% to 90%, and obstacle detection
accuracy between 80% and 88%. Sample numbers
increase energy efficiency, meaning that energy
consumption will be higher with time.Figure 3.The
designed system improves over the current system
with path-following accuracy of 92% to 99%, up to
95% wireless charging efficiency, and obstacle
detection accuracy of 95% to 99%, showing increased
efficiency and reliability. Figure 4.The system
optimized is better than the current system in all
aspects, and path-following accuracy is raised from
76%-84% to 92%-99%, wireless charging efficiency
is raised from 75%-90% to 95%, and obstacle
detection accuracy is raised from 80%-88% to 95%-
99%, with greater efficiency and
reliability.Table.2.The system optimized is more
accurate (95.00 mean) than the current system (80.00
mean). It is also more consistent, having a lower
standard deviation (2.000) and standard error (0.516)
than the current system (2.171 and 0.561,
respectively). Table.3. Levene’s test has no
significant difference of variance between the
systems. Independent samples t-test, on the other
hand, indicates that there is a significant mean
difference of -15.000 and p-value 0.000, which
proves that the optimized system performs better than
the current system.
6 DISCUSSION
AViTRoN greatly enhances the process of
autonomous charging for electric vehicles through
optimizing vision-based track routing and navigation.
Efficiency, accuracy, and reliability improve with
this, and practical and scalable autonomous charging
becomes achievable. With such a decentralized EV
battery charging system, efficient power transfer with
precise tracking of current was demonstrated,
ensuring stable operation at unity power factor.
Experimental results matched simulations well, and
the reliability of the control algorithm was effectively
confirmed, thus implying minimal steady-state error.
This study proves that decentralized charging is
feasible for the future structure of EV infrastructure
and can offer grid-friendly scalable solutions.
(Hossain, Al-Awami, and Abido, n.d.). Altruistic
charging delays peak EV charging demand, or that is,
not concurrent with peak base demand. Therefore,
peak total electricity demand is lower with Altruistic
charging. This lower peak demand means higher
penetrations of EVs can be accommodated without
increasing the Exceedance. This illustrates for the
Base case that low EV penetrations cause Exceedance
values around the same as for base demand alone. As
EV penetration increases, however, Selfish charging
leads to higher More than Altruistic charging values.
(“Driving Change: Electric Vehicle Charging
Behavior and Peak Loading” 2024) The primary side
hybrid reconfigurable compensation for constant
current/constant voltage control wireless EV
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
198

charging will be able to provide efficient management
of power delivery. It guarantees stable charging due
to the ability to dynamically change according to
changing power demands with high efficiency. The
reconfiguration of the system based on the load
conditions enhances the charging performance, and
this makes it very adaptable to a wide range of EV
models and charging scenarios. (Arulvendhan et al.,
n.d.). The review on wireless charging efficiency for
electric vehicles focuses on the most important
advancements in coil design, resonance tuning, and
power electronics to enhance energy transfer and
minimize losses. The review stresses the need to
optimize these technologies to improve overall
charging performance. The review also underlines the
safety, scalability, and cost-effectiveness
requirements of future wireless charging
infrastructure for EVs. (Ramakrishnan et al., n.d.)
Adding Electric Vehicles in the microgrid improves
the grid's flexibility in terms of energy storage and
balancing load. As an added mobile source of energy,
EVs may be helpful at peak demands or during the
short supply of energy. In any case, however,
integrating such vehicles calls for efficient charging
infrastructure and regulating bidirectional power
flows. (Sora, Serban, and Petreus, n.d.). Recent
developments in shielding technologies for wireless
electric vehicle charging systems aim to improve EMI
suppression and enhance energy transfer efficiency.
Advanced magnetic shielding, metamaterials, and
new materials are currently being researched in order
to minimize power loss and environmental impact.
These developments should enhance the
performance, safety, and reliability of wireless
charging infrastructure for EVs.(Quercio et al.,
n.d.)Recent developments in protecting technologies
for EV wireless charging highlight the reduction in
electromagnetic interference (EMI), safety, or
efficiency with various innovative materials or
designs such as multi-layered shields and ferrite
plates minimizing energy loss with future
development efforts focused on greater optimization
of their shielding performance with safer and highly
effective wireless chargers. Integrating electric
vehicles (EVs) into microgrids improves energy
efficiency and grid stability by enabling vehicle-to-
grid (V2G) technology. EVs can store excess
renewable energy and supply power during peak
demand, reducing reliance on traditional energy
sources. Smart charging strategies help balance load
distribution and enhance microgrid resilience.
Advanced communication systems ensure seamless
coordination between EVs and the grid for real-time
energy optimization. Future developments will focus
on AI-driven management, enhanced battery
performance, and greater integration with renewable
energy sources.
7 CONCLUSION
A summary of the work is the wireless charging
method for electric vehicles is evaluated, depending
on primary voltage estimation using only vehicle-side
data. A DC-DC converter is working for secondary
voltage control, ensuring efficient power
management on the vehicle side. Wireless power
transfer technology enhances electric vehicle
performance by streamlining the charging process,
extending range, and eliminating the need for
physical connections. The vehicle is positioned at a
designated commercial, and charging proceeds as
expected. In case of any issues, a buzzer indicator
immediately alerts the concerned party via a web
application. Hardware experiment results confirm the
successful estimation of primary voltage and
demonstrate that the Wireless Charging System
(WCS) can be effectively controlled through power
management based on maximum power and primary
voltage estimation, eliminating the need for load-side
voltage regulation.
8 TABLES AND FIGURES
The number of samples of the system data is
compared across several metrics against an optimized
version of the same system. Energy efficiency of the
system decreases very slightly with every increase in
sample number, thereby showing higher energy usage
with greater load. Accuracy in path follows and
efficiency of wireless charging for the optimized
version are higher compared to the existing version.
The optimized version reached 99% accuracy in the
path-following task, and the existing system reached
a maximum of 90%. The optimized system also has
better obstacle detection accuracy. Overall, the
optimized system is more efficient in terms of energy
usage and performance.
Optimized Vision-Based Path Planning and Navigation for Autonomous Electric Vehicle Charging
199
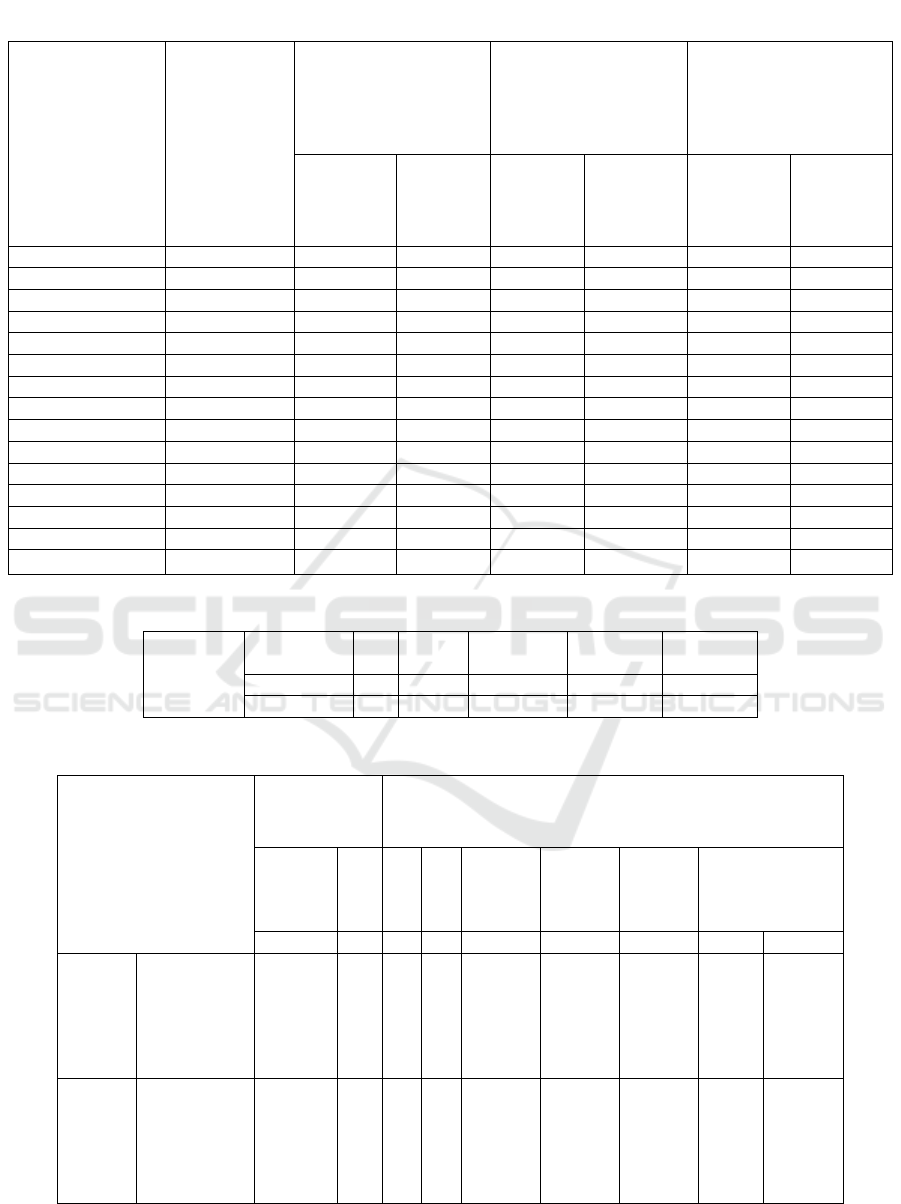
Table 3: Comparison of Existing and Optimized Systems.
Sample No.
Energy Efficiency
(Wh/km)
Path
Following
Accuracy
Wireless
Charging
Efficiency
Obstacle
Detection
Accuracy
Existing
System
Optimize
System
Existing
System
Optimized
System
Existing
System
Optimized
System
1 180 80 95 75 85 88 95
2 185 82 92 76 88 86 96
3 190 80 96 77 90 85 97
4 195 79 98 78 89 84 97
5 200 81 94 79 92 86 98
6 205 83 93 80 91 87 96
7 210 82 97 81 93 85 98
8 215 79 94 82 92 83 97
9 220 76 95 83 94 82 96
10 225 80 95 85 93 85 98
11 230 78 96 84 92 84 97
12 235 84 99 86 95 88 99
13 240 77 92 87 93 80 97
14 245 79 94 89 94 86 97
15 250 80 95 90 95 85 98
Table 4: SPSS Output.
Accuracy
Group N Mean
Std.
deviation
Std.error
mean
Existing 15 80.00 2.171 0.561
Optimize
d
15 95.00 2.000 0.516
Table 5: Independent Samples T-Test Results for Evaluating Energy Efficiency Between Existing and Optimized Systems.
Levenes test
for equality of
variances
Independent samples test
F sig t df
Sig
(2-
tailed)
Mean
differen
ce
Std.
error
differen
ce
95% confidence
interval of the
difference
lowe
r
u
pp
e
r
Existin
g
Equal
variance
assumed
0.073
0.7
89
-
1
9.
6
8
0
2
8
0.000 -15.000 0.762
-
16.56
1
-13.439
Optimi
zed
Equal
variances
not assumed
-
1
9.
6
8
0
2
7.
8
1
3
0.000 -15.000 0.762
-
16.56
2
-13.438
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
200
Levene's test reveals no significant difference in
variances between the existing and optimized
systems. The independent samples t-test reveals a
significant mean difference of -15.000 with a p-value
of 0.000, which states that the optimized system
outperforms the existing system significantly.
Table
4 shows the SPSS Output.
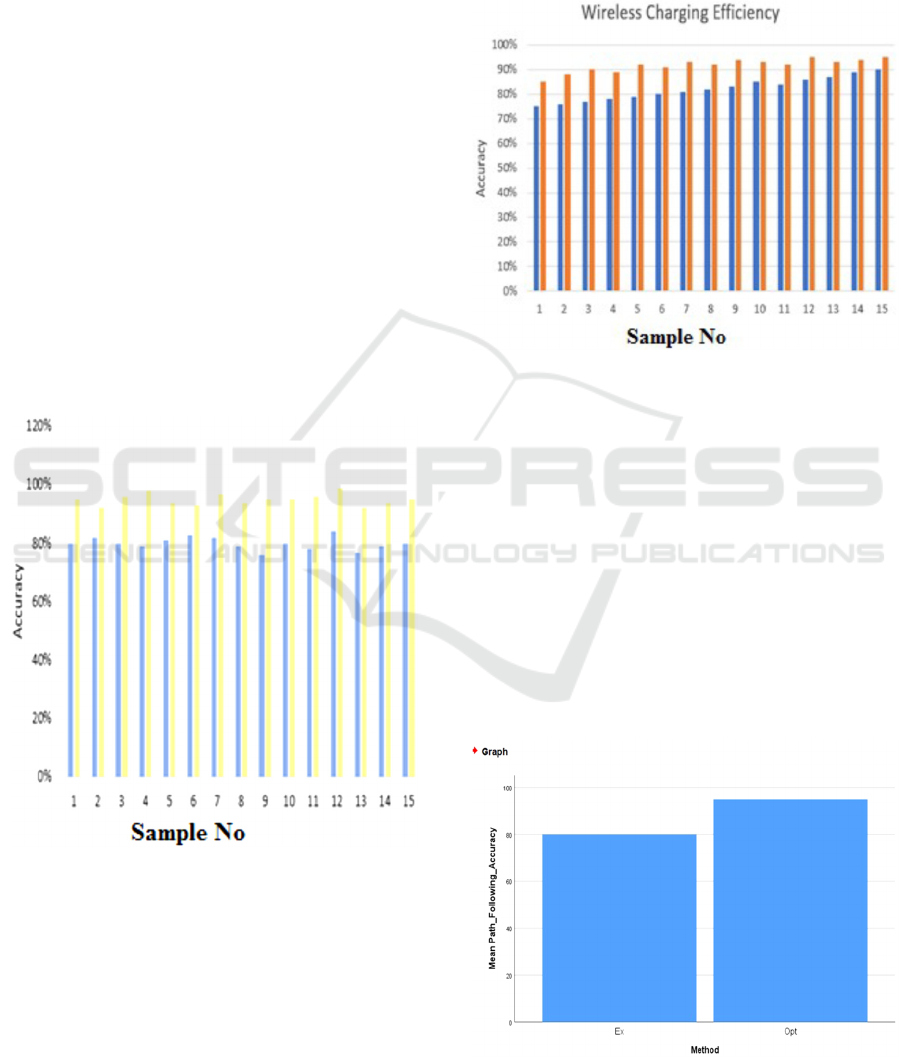
Figure 6 The existing system graph shows the
performance metrics of energy efficiency, path-
following accuracy, wireless charging efficiency, and
obstacle detection accuracy. The system exhibits
reasonable efficiency in path-following such that the
accuracy is found between 76% and 84%, the
efficiency of the aforementioned wireless charging
increases gradually from 75% to 90%, and the
obstacle detection accuracy is fluctuating while
staying within an average range between 80% and
88%. The energy efficiency (Wh/km) increases step-
by-step with sample numbers, showing increased
energy consumption over time. This visualization
helps compare improvements in the optimized
system.
Table 5 shows the Independent Samples T-
Test Results for Evaluating Energy Efficiency
Between Existing and Optimized Systems.
Figure 6: Path Following Accuracy.
The optimized system graph shows improvements
in all the key performance metrics, such as path-
following accuracy, wireless charging efficiency, and
obstacle detection accuracy. Path following accuracy
is always high, ranging from 92% to 99%, which
indicates improved navigation precision. Wireless
charging efficiency is improved to up to 95%,
ensuring better energy transfer. Obstacle detection
accuracy is also optimized, maintaining values
between 95% and 99%, which indicates superior
environmental awareness. Overall, the optimized
system outperforms the existing system in every
aspect, showcasing its enhanced efficiency and
reliability.
Figure 7: Wireless Charging Efficiency.
The optimized system outperforms the existing
system in all performance areas by a wide margin.
The accuracy in path-following is enhanced from
76%-84% of the existing system to 92%-99% in the
optimized version, making navigation more effective.
Efficiency in wireless charging increases to 95% from
the existing system of 75%-90%, ensuring better
energy transfer. Accuracy in obstacle detection
enhances from 80%-88% to 95%-99%, thus the
system becomes more reliable in obstacle
identification. Overall, the optimized system offers
higher efficiency, better.
Figure 7 shows the Wireless
Charging Efficiency.
Figure 8 shows the Mean Path
Following Accuracy.
Figure 8: Mean Path Following Accuracy.
Optimized Vision-Based Path Planning and Navigation for Autonomous Electric Vehicle Charging
201

REFERENCES
“An Efficient Design of LC-Compensated Hybrid Wireless
Power Transfer System for Electric Vehicle Charging
Applications.” 2022. Alexandria Engineering Journal
61 (8): 6565–80.
Arulvendhan, K., Srinivas Kandadai Nagaratnam, R.
Narayanamoorthi, Ahmad H. Milyani, Sultan
Alghamdi, and Mohammed Alruwaili. n.d. “Primary
Side Hybrid Reconfigurable Compensation for
Wireless EV Charging with Constant Current/Constant
Voltage Control.” Accessed January 30, 2025.
https://ieeexplore.ieee.org/abstract/document/1071434
9.
Aydin, Emrullah, Mehmet TimurAydemir, Ahmet Aksoz,
Mohamed El Baghdadi, and Omar Hegazy. 2022.
“Inductive Power Transfer for Electric Vehicle
Charging Applications: A Comprehensive Review.”
Energies 15 (14): 4962.
Diaz-Londono, Cesar, Paolo Maffezzoni, Luca Daniel, and
Giambattista Gruosso. n.d. “Comparison and Analysis
of Algorithms for Coordinated EV Charging to Reduce
Power Grid Impact.” Accessed January 30, 2025.
https://ieeexplore.ieee.org/abstract/document/1061489
1.
“Driving Change: Electric Vehicle Charging Behavior and
Peak Loading.” 2024. Renewable and Sustainable
Energy Reviews 189 (January):113953.
El-Shahat, Adel, and ErhuvwuAyisire. 2021. “Novel
Electrical Modeling, Design and Comparative Control
Techniques for Wireless Electric Vehicle Battery
Charging.” Electronics 10 (22): 2842.
Han, Sekyung, and Moses AmoasiAcquah. 2021. Grid-to-
Vehicle (G2V) and Vehicle-to-Grid (V2G)
Technologies. MDPI.
Hossain, Md Ismail, Ali T. Al-Awami, and Mohammad A.
Abido. n.d. “A Proportional and Weight Based
Decentralized Charge Controller of Electric Vehicles
for the Improvement of Local Voltage Profile.”
Accessed February 1, 2025.
https://ieeexplore.ieee.org/abstract/document/1054990
5.
Joseph, Peter K., Devaraj Elangovan, and Padmanaban
Sanjeevikumar. n.d. “System Architecture, Design, and
Optimization of a Flexible Wireless Charger for
Renewable Energy-Powered Electric Bicycles.”
Accessed January 30, 2025.
https://ieeexplore.ieee.org/abstract/document/9105100
Liu, Yuxin, Chunhua Liu, Wusen Wang, Senyi Liu, and
Yong Chen. n.d. “A Novel Wired/Wireless Hybrid
Multiport Energy Router for Dynamic EV Energy
Internet with Grid-Tied and Islanded Operations.”
Accessed January 30, 2025.
https://ieeexplore.ieee.org/abstract/document/1012484
9.
Mohamed, Ahmed A. S., Ahmed A. Shaier, Hamid
Metwally, and Sameh I. Selem. 2024. “Wireless
Charging Technologies for Electric Vehicles:
Inductive, Capacitive, and Magnetic Gear.” IET Power
Electronics 17 (16): 3139–65.
Mohamed, Naoui, Flah Aymen, Turki E. A. Alharbi,
Claude Ziad El-Bayeh, Sbita Lassaad, Sherif S. M.
Ghoneim, and Ursula Eicker. n.d. “A Comprehensive
Analysis of Wireless Charging Systems for Electric
Vehicles.” Accessed January 30, 2025.
https://ieeexplore.ieee.org/abstract/document/9759451/
.
Mohamed, Naoui, FlahAymen, and Mohammed Alqarni.
2021. “Inductive Power Transmission System for
Electric Car Charging Phase: Modeling plus Frequency
Analysis.” World Electric Vehicle Journal 12 (4): 267.
Quercio, Michele, Gabriele Maria Lozito, Fabio Corti,
Francesco Riganti Fulginei, and Antonino Laudani. n.d.
“Recent Results in Shielding Technologies for Wireless
Electric Vehicle Charging Systems.” Accessed
February 3, 2025.
https://ieeexplore.ieee.org/abstract/document/1041205
1.
Rahulkumar, J., R. Narayanamoorthi, Pradeep Vishnuram,
Mohit Bajaj, Vojtech Blazek, Lukas Prokop, and
Stanislav Misak. n.d. “An Empirical Survey on
Wireless Inductive Power Pad and Resonant Magnetic
Field Coupling for In-Motion EV Charging System.”
Accessed January 30, 2025.
https://ieeexplore.ieee.org/abstract/document/1000233
7.
Ramakrishnan, Venkatesan, Savio A. Dominic, C. Balaji,
Narayanamoorthi Rajamanickam, Hossam Kotb, Ali
Elrashidi, and Waleed Nureldeen. n.d. “A
Comprehensive Review on Efficiency Enhancement of
Wireless Charging System for the Electric Vehicles
Applications.” Accessed February 1, 2025.
https://ieeexplore.ieee.org/abstract/document/1047399
7.
Semsar, Sepehr, Zhichao Luo, Shuang Nie, and Peter W.
Lehn. n.d. “Integrated Wireless Charging Receiver for
Electric Vehicles with Dual Inverter Drives.” Accessed
January 30, 2025.
https://ieeexplore.ieee.org/abstract/document/1026832
5.
Shahin, Ahmed, Almoataz Y. Abdelaziz, Azeddine Houari,
Babak Nahid-Mobarakeh, Serge Pierfederici, Fujin
Deng, and Sayed Abulanwar. n.d. “A Comprehensive
Analysis: Integrating Renewable Energy Sources with
Wire/Wireless EV Charging Systems for Green
Mobility.” Accessed January 30, 2025.
https://ieeexplore.ieee.org/abstract/document/1068941
9.
Shi, Ke, Chunsen Tang, Zhihui Wang, Xiaofei Li,
Yuanzhao Zhou, and Yingjun Fei. n.d. “A Magnetic
Integrated Method Suppressing Power Fluctuation for
EV Dynamic Wireless Charging System.” Accessed
January 30, 2025.
https://ieeexplore.ieee.org/abstract/document/9677927
Song, Kai, Yu Lan, Xian Zhang, Jinhai Jiang, Chuanyu
Sun, Guang Yang, Fengshuo Yang, and Hao Lan. 2023.
“A Review on Interoperability of Wireless Charging
Systems for Electric Vehicles.” Energies 16 (4): 1653.
Sora, James, Ioan Serban, and Dorin Petreus. n.d.
“Enhancing Microgrid Operation Through Electric
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
202

Vehicle Integration: A Survey.” Accessed February 3,
2025.
https://ieeexplore.ieee.org/abstract/document/1052151
3.
Zhang, Shiyao, and James J. Q. Yu. n.d. “Electric Vehicle
Dynamic Wireless Charging System: Optimal
Placement and Vehicle-to-Grid Scheduling.” Accessed
January 30, 2025.
https://ieeexplore.ieee.org/abstract/document/9528835
Zhang, Yiming, Shuxin Chen, Xin Li, and Yi Tang. n.d.
“Design of High-Power Static Wireless Power Transfer
via Magnetic Induction: An Overview.” Accessed
January 30, 2025.
https://ieeexplore.ieee.org/abstract/document/9675068
Zhang, Yiming, Wenbin Pan, Hui Wang, Zhiwei Shen,
Yuanchao Wu, Jiqing Dong, and Xingkui Mao. n.d.
“Misalignment-Tolerant Dual-Transmitter Electric
Vehicle Wireless Charging System with
Reconfigurable Topologies.” Accessed January 30,
2025.https://ieeexplore.ieee.org/abstract/document/973
9940.
Optimized Vision-Based Path Planning and Navigation for Autonomous Electric Vehicle Charging
203
