
AI Driven Biointegrated Control Systems for Enhancing Driver
Safety and Personalized Vehicle Adaptation
Raju Bhadrabasolara Revappa
1
, Seema Vasudevan
2
and Jaideep Rukmangadan
2
1
Department of Automobile Engineering, The Oxford College of Engineering, Bangalore , Karnataka, India
2
Department of Mechatronics Engineering, The Oxford College of Engineering, Bangalore, Karnataka, India
Keywords: AI Driven Systems, Biointegrated Control, Driver Monitoring, Real‑Time Driver Analysis.
Abstract: Rapid development of AI has brought revolutionary change in the auto industry, creating a new generation of
driver-vehicle interactions. This article proposes the AI-Driven Biointegrated Control Systems (AI-BICS), a
next generation platform to optimize vehicle-to-user interaction based on real-time physiological and
cognitive information from drivers. AI-BICS is the fusion of cutting-edge bio-sensing devices and the latest
deep learning technologies for increased safety, ease of use and customization of our cars. The technology
entails embedding bio-sensors in the car ecosystem that monitor physiological parameters like heart rate, skin
conductance and muscle activity. These signals go through a hybrid deep learning system, composed of
convolutional neural networks (CNNs) for image inputs and recurrent neural networks (RNNs) for time series.
Additionally, Transformer architectures are used for multi-modal data fusion for a complete view of the
driver’s state. It adjusts vehicle settings, like acceleration and steering response, on the fly and provides live
feedback to help you stay in control and comfortable. The system proposes a number of important
contributions to the discipline. It goes beyond the traditional driver monitoring system by integrating real-
time emotion detection, stress evaluation, and fatigue detection to give users more situational awareness. AI-
BICS also facilitates adaptive control, seamlessly morphing from manual to autonomous driving and provides
tailored driving experience through learning and responding to the user’s preferences. The intended effects of
this research are the enormous increases in road safety and driver wellbeing. In combatting important
problems including impaired driving and brain overload, the system is set to reshape the frontiers of end-user
car technology. Further, it can be used for fleet management and insurance schemes to offer a complete set of
safer and smarter transportation solutions.
1 INTRODUCTION
Artificial intelligence (AI) applications to automobile
industry have revolutionized how automobiles work
and connect with their passengers. AI has provided
huge advances in the last decade, with autonomous
driving, intelligent navigation and predictive
maintenance being some of them. Whether it is in
early applications for vehicle efficiency or in
sophisticated ones for driver safety and comfort, AI is
now an inevitable component of the automotive. Such
advances haven’t only revolutionised driving but they
also helped create the foundation for human-centred
systems that anticipate and accommodate driver
requirements. All these achievements have left us
with a set of new challenges in the form of the
proliferation of semi-autonomous and self-driving
cars. Safety and driver comfort are still a big issue,
especially in liminal situations where we need to be
human. Even existing systems, which can keep track
of a simple driver’s actions, are not a complete
account of a driver’s physiological and mental health.
Stress, fatigue and distraction are still leading causes
of traffic accidents and call for improved monitoring
and dynamic control systems. We need new
technologies beyond surface data to offer safe,
personalized driving. It is a study that focuses on an
essential omission in the current automotive
technology: the timely integration of physiological
and cognitive data to improve vehicle management
and driver assistance. Modern driver monitors have
cameras and rudimentary sensors to monitor
behaviour, but they rarely deploy bio-sensing
technologies that gather deep levels of data on a
driver’s mental and emotional states. This constraint
not only limits the systems predictive response but
Revappa, R. B., Vasudevan, S. and Rukmangadan, J.
AI Driven Biointegrated Control Systems for Enhancing Driver Safety and Personalized Vehicle Adaptation.
DOI: 10.5220/0013888300004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 2, pages
669-675
ISBN: 978-989-758-777-1
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
669

also the development of true user-centric vehicle
experiences. This is where we have a unique
solution––the AI-Driven Biointegrated Control
System (AI-BICS). With high-level bio-sensing and
the most recent AI models as the core components,
AI-BICS will transform the driver-car interface. The
engine continuously adjusts vehicle dynamics from
physiological and cognitive input in real-time for
best-in-class safety, comfort and customization. AI-
BICS, unlike traditional systems, doesn’t just
measure behaviour but provides a holistic view of the
driver state that can guide smart decisions and
intervention.
2 RELATED WORK
In driver monitoring systems, the years have been rich
in development as artificial intelligence and sensors
have been introduced in an instant.
C.E. Okwudire,
H.V. Madhyastha
(2023) The driver monitoring system
(DMS) of today mostly based on visual and
behavioural signals using in-cabin cameras to identify
facial expressions, eyes and head positions. These
technologies want to flag fatigue, sedation or
sleepiness and provide warnings or intervention to
maintain safety.
C. Chen, S. Ding, J. Wang (2023)
Artificial intelligence-based refinements in such
systems have added some rudimentary predictive
features, so that cars can predict risks from patterns
that can be seen (
Y. Luo, M.R. Abidian, J.-H. Ahn, D.
Akinwande, A.M. Andrews et al.,2023)
. Though they’ve
made the road safer, these innovations have not been
generalised to include much in the way of visual
signals. As such, AI has become a game-changer in
vehicle control, in particular autonomous driving and
advanced driver-assistance systems (ADAS). These
systems also have ML algorithms for lane-keeping,
adaptive cruise control and collision avoidance (
J.
Luo, W. Gao, Z.L. Wang ,2021). AI algorithms interpret
the information from LiDAR, radar and cameras to
drive decisions in real time to eliminate human error
and increase driving performance. But for all these
improvements, such systems only pay attention to the
driving environment outward, and nothing about the
inside. These otherwise strong technologies are
usually limited by a lack of fully integrated driver (
C.
Yang, B. Sun, G. Zhou, T. Guo, C. Ke et al.,2023).
Preexisting solutions, though revolutionary, have
limitations. Another Achilles’ heel is the absence of
multi-modal integration to capture the driver’s
physiological, cognitive and behavioural condition
(
G. Cao, P. Meng, J. Chen, H. Liu, R. Bian et al., 2023).
The majority of systems are based on single
modalities, including eye movement, and ignore all
the data coming in from physiological measures, (
W.
Huang, X. Xia, C. Zhu, P. Steichen, W. Quan et al.,2021)
such as heart rate variability, skin conductance or
EEG (
X. Wang, H. Yang, E. Li, C. Cao, W. Zheng et al.,
2023). This mono dimensional method limits the
system’s capacity to generate an overall picture of the
driver’s state. Further, existing mechanisms do not
change dynamically as needed in real time, but rather
depend on thresholds and generic interventions. This
constrains their ability to tailor intervention to the
specific driver profile or demands of the scenario,
which means that they provide less support (
M. Wang,
T. Wang, Y. Luo, K. He, L. Pan et al., 2021).
The AI-BICS is a proposed architecture that
bridges these divides using the latest in bio-sensing
with the most current AI methods. (
S.H. Kwon et al.,
2022) AI-BICS does not rely solely on inputs from
one modality (physiological signals, behavioural
states, environment) but also incorporates
information from many modes to present a holistic
picture of the state of the driver (
Alagumalai et al.,
2022). The combination of CNNs, RNNs and
Transformer architecture in its hybrid deep learning
algorithm combines multiple sources of data to create
a unified decision stream in real-time with
unparalleled accuracy. Furthermore, AI-BICS can
change adaptively based on driver state and provide
an individual-specific intervention as per the driver’s
requirement and preferences. Linked between the
external environment and the internal analysis of
driver states, AI-BICS redefines driver monitoring
and control technology by breaking through key
technological limitations in existing technologies.
3 PROPOSED FRAMEWORKS
Layered system (AI-BICS – Artificially Intelligent
Biointegrated Control System) incorporating
physiological and behavioural information from real-
time to adaptively to improve the driving behaviour
and support of vehicles. It consists of 3 layers (Bio-
Sensing Layer, Data Processing Layer, and AI
Model) with the final layer being a decision process
to modify the behavior of the vehicle according to the
state of the driver. It provides seamless connection
between the driver and the vehicle for enhanced
safety, convenience and customization through
intelligent, adaptive control.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
670

3.1 System Architecture
3.1.1 Bio-Sensing Layer
Bio-sensing layer AI-BICS is built on by harvesting
wide array of physiological and behavioural
information from the driver. This layer consists of
high-end wearable and embedded sensors
strategically located in the cabin of the car.
Wristbands, EEG headsets, chest-based heartrate
monitors, etc., all record physiological data (heart
rate, skin temperature, galvanic skin reaction, brain
activity). Sensors embedded into the steering wheel,
seats and seatbelts go further than these signals by
recording muscle tension, hand pressure and body
alignment. On board to pick up on feelings and levels
of stress, advanced emotion-recognition technology
is used. Face-recognition cameras monitor micro-
expressions; EEG machines monitor brainwaves
indicative of cognitive load, fatigue or stress.
Combining these signals, the bio-sensing layer
produces a continuous multi-modal feed that gives
you a true picture of the driver’s cognitive and
physiological state. This granular, near-real-time
understanding of the driver drives the AI-driven
changes to the car.
3.1.2 Data Processing Layer
Data processing layer: the data processing layer takes
care of the multi-modal, high frequency data that the
bio-sensing layer produces. Since the system is live,
edge computing is used to do immediate
preprocessing, filtering and feature extraction. Edge
computing keeps latency low by crunching the data
locally in the car to cut down the time needed to get a
useful insight. So noise in EEG signals or heart rate
changes, for example, are smoothed out, and
revealing details like fatigue signs or stress waves are
flagged for downstream analysis. For deep learning
training and optimization in the long term, the system
also uses cloud based deep learning platforms.
Drivers over longer time periods are anonymized and
stored in cloud servers where better models are
trained with the best AI. AI-BICS will learn through
this iterative mechanism to adjust to different driver
profiles and become more accurate in predictions
over time. Edge and cloud computing seamlessly
marry together so both quick fix and long-term
learning is efficiently delivered.
3.1.3 AI Model
In AI-BICS the hybrid deep learning model is at the
heart of this that is dedicated to handle multi-modal
data from the bio-sensing layer. It has three parts:
• Hybrid Deep Learning:
• Convolutional Neural Networks (CNNs)
are used to learn from image data like
facial expressions recorded by incabin
cameras. CNNs decode images for
spotting small movements in expression
that indicate tiredness, tension or other
states.
• Recurrent Neural Networks (RNN) to
process time series of data like heart rate,
EEG waves, and hand movements.
RNNs do a great job of representing
temporal dependencies and patterns that
point to changes in cognition or
physiological states over time.
• Multi-Modal Data Fusion: In order to bring the
various data flows together, Transformer-type
architectures are used. Multi-modal fusion is
possible with transformers as they can track
correlations between inputs from different
modalities (e.g., EEG, face, heart rate) in parallel
and spatial order. Combining physiological,
behavioural and environmental signals,
Transformer models provide a single snapshot of
the driver’s condition for optimal predictions and
intervention.
• Decision Layer: This converts the AI model’s
inputs into autopilot vehicle controls and
feedback loops in real time. Depending on
driver’s state – whether it is "alert", "fatigued" or
"stressed" – the system adjusts parameters of the
car in real time. Steering feel, acceleration and
suspension stiffness, for example, are all
modified to make up for impaired driver
behaviour when the driver is tired.
AI-BICS further provides haptic and visual
feedback that keep the driver on the ball. Haptic
feedback systems, like vibrations of the steering
wheel or seat, tell the driver if it notices that she is
feeling stressed or distracted. Visual cues in
dashboard notifications or head-up displays also
support situational awareness, which leads to
corrective steps. Combining all these elements
provides an instant, adaptive, personalised AI
response focused on the safety and comfort of the
driver while keeping the vehicle in good running
condition.
AI Driven Biointegrated Control Systems for Enhancing Driver Safety and Personalized Vehicle Adaptation
671

Figure 1: Multi-Modal Data Fusion Engine for Driver State Recognition.
Figure 1 depicts the flow of information from
different bio-sensors to practical vehicle control
signals using the AI-BICS model. The upper layer
shows inputs from EEG sensors, heartrate monitors,
wearables and embedded devices, all of which collect
physiological and behavioural data in real time. These
inputs are pre-processed in real time at the Edge
Computing Layer for low latency data refinement,
and then also uploaded to the Cloud System for model
consolidation over time. Its middle section presents
the Hybrid Deep Learning Model – CNNs and RNNs
to extract spatial and temporal features, and
Transformer Multi-Modal Data Fusion to combine
various inputs into a coherent model. This combo
enables powerful driver state analysis. The lower
portion of the image represents the AI-BICS decision
making system whereby AVCS continuously
monitors such things as speed and steering for
enhanced driver safety, comfort, and customization.
This ultimately optimizes Enhanced Vehicle
Performance as seen in the final output layer.
The AI-BICS proposal would be a revolutionary
upgrade over current driver monitoring platforms by
bringing physiological, behavioural, and
environmental information into a single platform.
Bio-sensing layer receives diversified inputs in real
time, and data processing layer provides feature
extraction and model fitting. This hybrid deep
learning algorithm with CNNs, RNNs and
Transformer architectures makes a high-quality
prediction and decision on each driver scenario. AI-
BICS provides a proactive, intelligent approach for
filling in vital gaps of current automotive systems via
dynamic vehicle parameter adjustments and
feedback. It is the kind of model that could
completely reshape driver-car experiences, setting the
next benchmark in safety, customization and overall
experience for the next-generation vehicle.
3.2 AI Model Components
This AI-BICS platform is supported by sophisticated
AI models for accurate analysis and decision-making.
Data Input: The device processes a variety of
physiological and behavioural data streams coming
from embedded and wearable sensors. Inputs from
the body such as heartrate variability, skin
conductance, and EEG are able to give you some
indication of the driver’s body state and mood.
Behavioural information – eye tracking, facial micro-
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
672
expressions, and force applied to the steering wheel –
sits alongside physiological information to provide an
insight into driver behaviour. With such a wide range
of inputs, AI-BICS can recognize cognitive load,
fatigue, and stress variation with great accuracy.
Multi-Modal Data Fusion: In order to efficiently
process the multi-modal streams of data, AI-BICS
uses Transformer architectures. Transformers are
especially suitable for merging multiple inputs
because they can simultaneously deal with relational
relationships between variables. This method enables
the system to fuse physiological and behavioural data
in real-time and recognise patterns pointing to driver
states. Through multi-modal data fusion, AI-BICS
will be able to produce high-quality insights
regardless of the partial or noisy data, with
significantly improved accuracy and reliability.
Prediction Layer: Prediction layer defines the
driver state classification into very specific "alert,"
"fatigued," and "stressed" types. The solution uses a
hybrid deep learning approach that uses
Convolutional Neural Networks (CNNs) for image
input (e.g., facial recognition) and Recurrent Neural
Networks (RNNs) for time-series biometrics. This is
evaluated by calculating the classification
performance, accuracy, recall and F1 scores of the
model. AI-BICS achieves this high reliability by
dynamically recalibrating predictions in real time
with streaming data to provide the right state
classification across different driving scenarios.
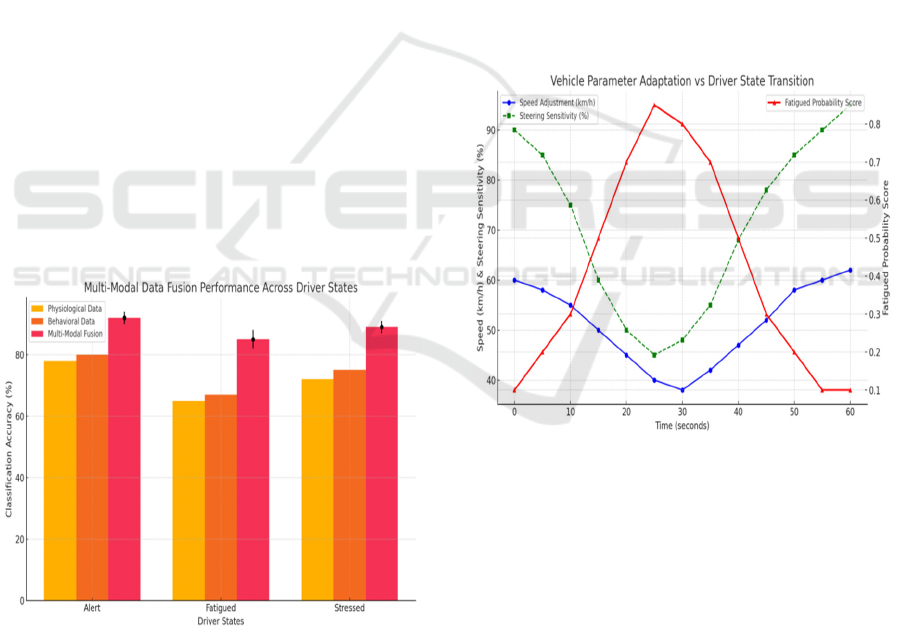
Figure 2: Accuracy of Multi-Modal Fusions for Different
Driver States.
Decision Layer: In the decision layer, RL-based
reinforcement learning approaches are applied to
make recommendations about appropriate
intervention methods. In response to the detected
driver state, the system modifies vehicle parameters
like the speed, steering and cabin environment
automatically. RL is contextual in the interventions,
maximising safety and comfort while minimizing
interference to the driver. For example, in fatigue
detection, the system adjusts to alternating alerts and
semi-autonomous controls to improve driving
comfort.
Figure 2 Classification of driver states (i.e., Alert,
Fatigued, and Stressed) for single input modalities
and multi-modal data fusion. Figure demonstrates
clearly the performance gap between physiological
data alone, behavioral data alone and integrated
Multi-Modal Fusion. Notably, multi-modal data
fusion is reliably more accurate in all states, and has
a 10% to 20% higher performance than single-mode
systems. This outcome shows why combining
multiple data streams are crucial to a holistic driver
conditions analysis. Error bars ensure that the system
is robust by addressing variations, thereby
demonstrating the stability of AI-BICS for predicting
driver states under various scenarios.
Figure 3: Vehicle Parameter Adaptation Vs. Driver State
Transition.
Figure 3 shows how parameters of the vehicle
change in real-time with the driver’s state. The graph
indicates the correlation between the risk of a driver
becoming fatigued and the subsequent modifications
to the speed and steering controls. As the probability
of fatigued state increases, the system actively slows
down the vehicle and decreases steering response to
improve stability and safety. When the driver wakes
up, both acceleration and steering become steadily
more normal. Such adaptive behavior in real-time
also proves the responsiveness of AI-BICS Adaptive
Vehicle Control System to effectively mitigate risk
during
impaired driving. This dual Y-axis display
AI Driven Biointegrated Control Systems for Enhancing Driver Safety and Personalized Vehicle Adaptation
673
Table 1: Classification of Driver States Depending on Input Modes.
Driver
States
Physiological Data
Accuracy (%)
Behavioral Data
Accuracy (%)
Multi-Modal
Fusion
Accuracy
(%)
Improvement
Over Single
Modality
(%)
Alert 78.5 80.2 92.3 13.8
Fatigue
d
65.4 67.8 85.5 17.7
Stressed 72.1 75 89.4 14.4
demonstrates exactly how the probabilities of driver
states are matched to vehicle control changes over
time demonstrating the accuracy and usefulness of
the system
Table 1 presents a detailed view of classification
performance for each of three driver states, Alert,
Fatigued and Stressed, on three different input
modalities (physiological, behavioral and multi-
modal fusion). The results show that multi-modal
fusion performs significantly better than the
individual modalities with highest classification
accuracy across all states. For instance, physiological
and behavioural data alone provide accuracy of 65–
80% but when combining these modalities through
multi-modal fusion, 92.3% accuracy for "Alert",
85.5% accuracy for "Fatigued" and 89.4% accuracy
for "Stressed." Furthermore, accuracy improvement
is from 13.8%–17.7% highlighting the value of
integrating multiple data sources to ensure a more
accurate and valid driver state measurement. Such
findings demonstrate the ability of the AI-BICS
system in the proposed model to detect driver states
by understanding multidimensional physiological and
behavioural patterns
Table 2: System Latency and Response Time for Vehicle Parameter Adaptation.
Driver State
Transitions
Speed
Adaptation
Latenc
y
(
ms
)
Steering Sensitivity
Adjustment Latency (ms)
System
Decision Time
(
ms
)
Overall
Response Time
(
ms
)
Alert → Fatigued
120 135 220 340
Fatigued →
Stresse
d
140 155 250 370
Stressed → Alert
110 125 200 315
Table 2 shows the system responsiveness to driver
state transitions: latency and total response time to
vehicle parameter changes. It measures three
transitions – Alert to Fatigued, Fatigued to Stressed,
and Stressed to Alert – and important response
parameters, such as speed adaptation latency, steering
sensitivity adjustment latency, system decision time,
and overall response time. The findings reveal that the
system is very low-latency with speed adjustment
from 110 to 140 ms and steering sensitivity
adjustments from 125 to155 ms System decision
times are similarly fast, making sure the AI-BICS
system intervenes in time. The total response time
remains less than 370 ms and reflects how the system
reacts rapidly to driver state changes with low
latency. This comparison illustrates the system’s
suitability for real-time applications, where fast
response is required for safety and driver assistance.
4 CONCLUSIONS
The AI-Driven Biointegrated Control System (AI-
BICS) is the next generation of automotive systems
that combine real-time physiological and behavioral
data with cutting edge AI. With its layers of structure,
AI-BICS improves safety on the road, personalization
and experience. Because the system can track driver
conditions – fatigue, stress, distraction, etc – the
unhealthy driving situation can be identified and
prevented in advance, so appropriate actions can be
made. With autopilotly controlling vehicle features,
reconfiguring cabin interiors, and offering predictive
accident avoidance tools, AI-BICS sets a new bar for
driver-car technology. And the systems ongoing
learning also guarantees that every driving is tailored
to the driver individually, with vehicle parameters
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
674

and settings adapted to drivers. It’s not only this
research that fixes the drawbacks of current driver
monitoring technologies but it shows that multi-
modal data fusion and real-time AI-powered decision
support can be key for better vehicle performance and
user safety. AI-BICS could impact more than just cars
with revolutionary fleet management, autonomous
vehicle operation and insurance models. With the
evolution of automotive into more intelligent, user-
centric systems, AI-BICS is one innovation that has
the potential to change the paradigm of safety and
personalization. It is scalable and flexible, which
promises to open the doors to future advancements,
which is a great advance in the merging of AI and
human-centred technology.
REFERENCES
Alagumalai, W. Shou, O. Mahian, M. Aghbashlo, M.
Tabatabaei et al., “Self-powered sensing systems with
learning capability,” Joule, vol. 6, pp. 1475–1500,
2022. DOI: 10.1016/j.joule.2022.06.001.
B. Feng, T. Sun, W. Wang, Y. Xiao, J. Huo et al.,
“Venation-mimicking, ultrastretchable, room-
temperature-attachable metal tapes for integrated
electronic skins,” Adv. Mater., vol. 35, pp. 2208568,
2023. DOI: 10.1002/adma.202208568.
C. Chen, S. Ding, J. Wang, “Digital health for aging
populations,” Nat. Med., vol. 29, pp. 1623–1630, 2023.
DOI: 10.1038/s41591-023-02391-8.
C. Yang, B. Sun, G. Zhou, T. Guo, C. Ke et al.,
“Photoelectric memristor-based machine vision for
artificial intelligence applications,” ACS Mater. Lett.,
vol. 5, pp. 504–526, 2023. DOI:
10.1021/acsmaterialslett.2c00911.
C.E. Okwudire, H.V. Madhyastha, “Distributed
manufacturing for and by the masses,” Science, vol.
372, pp. 341–342, 2021. DOI: 10.1126/science.
abg4924.
F. Sun, Q. Lu, S. Feng, T. Zhang, “Flexible artificial
sensory systems based on neuromorphic devices,” ACS
Nano, vol. 15, pp. 3875–3899, 2021. DOI:
10.1021/acsnano.0c10049.
G. Cao, P. Meng, J. Chen, H. Liu, R. Bian et al., “2D
material based synaptic devices for neuromorphic
computing,” Adv. Funct. Mater., vol. 31, pp. 2005443,
2021. DOI: 10.1002/adfm.202005443.
J. Luo, W. Gao, Z.L. Wang, “The triboelectric
nanogenerator as an innovative technology toward
intelligent sports,” Adv. Mater., vol. 33, pp. 2004178,
2021. DOI: 10.1002/adma.202004178.
M. Wang, Y. Luo, T. Wang, C. Wan, L. Pan et al.,
“Artificial skin perception,” Adv. Mater., vol. 33, pp.
2003014, 2021. DOI: 10.1002/adma.202003014.
M. Wang, T. Wang, Y. Luo, K. He, L. Pan et al., “Fusing
stretchable sensing technology with machine learning
for human–machine interfaces,” Adv. Funct. Mater.,
vol. 31, pp. 2008807, 2021. DOI:
10.1002/adfm.202008807.
S.H. Kwon, L. Dong, “Flexible sensors and machine
learning for heart monitoring,” Nano Energy, vol. 102,
pp. 107632 2022. DOI: 10.1016/j.nanoen.2022.10763
2.
W. Huang, X. Xia, C. Zhu, P. Steichen, W. Quan et al.,
“Memristive artificial synapses for neuromorphic
computing,” Nano-Micro Lett., vol. 13, pp. 85, 2021.
DOI: 10.1007/s40820-021-00618-2.
X. Wang, H. Yang, E. Li, C. Cao, W. Zheng et al.,
“Stretchable transistor-structured artificial synapses for
neuromorphic electronics,” Small, vol. 19, pp.
2205395, 2023. DOI: 10.1002/smll.202205395.
Y. Luo, M.R. Abidian, J.-H. Ahn, D. Akinwande, A.M.
Andrews et al., “Technology roadmap for flexible
sensors,” ACS Nano, vol. 17, pp. 5211–5295, 2023.
DOI: 10.1021/acsnano.2c12606.
Y. Wang, M.L. Adam, Y. Zhao, W. Zheng, L. Gao et al.,
“Machine learning-enhanced flexible mechanical
sensing,” Nano-Micro Lett., vol. 15, pp. 55, 2023. DOI:
10.1007/s40820-023-01013-9.
AI Driven Biointegrated Control Systems for Enhancing Driver Safety and Personalized Vehicle Adaptation
675
