
Lane Change Detection Algorithm on Real World Driving for
Arbitrary Road Infrastructures Using Raspberry Pi
B. Dharani Bharath and G. Thirumalaiah
Department of ECE, Annamacharya University, New Boynapalli, Rajampet, Andhra Pradesh, India
Keywords: Raspberry Pi, MEMS Sensor, USB Webcam, Lane Change Detection Algorithm.
Abstract: The Lane Change Detection Algorithm on Real-World Driving for Arbitrary Road Infrastructures is a robust
system designed to enhance driver safety by monitoring and analyzing lane changes. Using a Raspberry Pi as
the core processor, the system integrates a USB web camera for real-time video capture and computer vision
algorithms to detect lane markings and vehicle positioning. A MEMS sensor monitors steering and lateral
movements, while ultrasonic sensors measure the proximity of nearby vehicles to ensure safe lane transitions.
Alerts for unsafe or improper lane changes are delivered audibly through a 3.5 mm jack speaker, and visual
feedback is displayed on an LCD. This system offers a comprehensive solution for real-time lane change
monitoring across diverse road environments, improving road safety and driver awareness.
1 INTRODUCTION
Lane changing is a critical maneuver in driving that
significantly impacts road safety, especially in
complex and arbitrary road infrastructures. The
ability to detect and analyze lane changes in real-time
can help mitigate accidents caused by abrupt or
unsafe transitions. This research presents a Lane
Change Detection Algorithm utilizing Raspberry Pi,
leveraging real-time video processing and sensor
integration to enhance driver awareness. The system
incorporates a USB camera for continuous lane
monitoring, MEMS sensors to capture vehicle
dynamics, and ultrasonic sensors to detect
surrounding obstacles. By analyzing vehicle
positioning and lateral movements, the algorithm
provides real-time feedback through an audio alert
system and an LCD display, ensuring safer driving
practices. This technology is designed to function
effectively across diverse driving conditions, making
it a valuable tool for intelligent transportation systems
and advanced driver assistance applications.
2 RELATED WORKS
Lane change detection is a critical aspect of
Advanced Driver Assistance Systems (ADAS) and
autonomous vehicle technologies. Various
approaches have been explored in the literature,
including traditional image processing techniques,
machine learning-based models, and sensor fusion
methods. This section reviews existing lane detection
and lane change detection techniques, highlighting
their advantages and limitations when applied to real-
world road infrastructures.
2.1 Lane Detection and Tracking
Techniques
Traditional Image Processing-Based Approaches:
Traditional lane detection relies on extracting lane
markings using image processing techniques such as:
• Edge Detection Methods: The Canny edge
detection algorithm has been widely used to
identify lane boundaries. For example, [He
and Wang, 2015] applied edge detection
followed by the Hough Transform to detect
straight lane markings. However, these
methods struggle with complex road
environments such as faded lane markings,
curved roads, and occlusions.
• Hough Transform-Based Methods: The
Hough Transform is effective in detecting
straight lane lines but often fails in curved
roads. To address this, [Kim et al., 2017] used
a modified probabilistic Hough Transform,
Bharath, B. D. and Thirumalaiah, G.
Lane Change Detection Algorithm on Real World Driving for Arbitrary Road Infrastructures Using Raspberry Pi.
DOI: 10.5220/0013883200004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 2, pages
377-382
ISBN: 978-989-758-777-1
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
377

improving detection in challenging road
conditions.
• Perspective Transformation: Birds-eye-
view transformation techniques are used to
correct perspective distortions in lane images.
[Kumar et al., 2018] combined inverse
perspective mapping (IPM) with edge
detection for improved lane segmentation.
Machine Learning-Based Approaches: To
overcome the limitations of traditional methods,
machine learning-based approaches have been
explored:
• Support Vector Machines (SVM): [Chen et
al., 2019] used SVM classifiers trained on lane
pixel features for improved robustness in
varying lighting conditions.
• Convolutional Neural Networks (CNNs):
Deep learning methods such as CNNs have
shown superior accuracy in lane detection.
[Pan et al., 2020] introduced a CNN-based
model trained on large-scale datasets like
TuSimple and CULane, achieving state-of-
the-art results.
• Hybrid Approaches: Combining traditional
image processing with machine learning has
been proposed to enhance robustness. For
example, [Zhang et al., 2021] combined edge
detection with a CNN-based segmentation
network to achieve accurate lane
segmentation.
2.2 Lane Change Detection Techniques
Vision-Based Lane Change Detection: Vision-
based methods primarily use lane departure
information to detect lane changes.
• Optical Flow Techniques: Optical flow
methods track pixel movement in consecutive
frames to infer vehicle motion. [Rashid et al.,
2016] applied Lucas-Kanade optical flow to
detect lateral vehicle movement indicating a
lane change. However, these methods are
computationally expensive.
• Lane Marking Tracking: [Liu et al., 2018]
developed a lane tracking system that
continuously monitors lane markings and
detects deviations exceeding a threshold,
indicating a lane change.
• Deep Learning for Lane Change
Prediction: Recurrent Neural Networks
(RNNs) and Long Short-Term Memory
(LSTM) models have been used for predicting
lane changes based on past vehicle
trajectories. [Lee et al., 2019] proposed an
LSTM model trained on real-world driving
data to predict lane changes with high
accuracy.
Sensor Fusion-Based Lane Change Detection: In
addition to vision-based methods, sensor fusion
techniques integrate multiple data sources for
improved reliability.
• IMU and GPS-Based Approaches: [Wang et
al., 2020] fused inertial measurement unit
(IMU) and GPS data to detect lane changes
based on vehicle motion patterns.
• LiDAR and Radar Fusion: Some high-end
autonomous systems integrate LiDAR and
radar to detect lane changes. [Schwarz et al.,
2021] developed a LiDAR-based lateral
motion tracking system for lane change
detection. However, the high cost and power
requirements make these solutions impractical
for low-cost embedded systems like
Raspberry Pi.
2.3 Summary and Research Gaps
From the surveyed literature, the following research
gaps are identified:
• Lack of efficient low-power lane change
detection solutions suitable for embedded
platforms like Raspberry Pi.
• Limited real-world evaluation on
unstructured roads and arbitrary lane
configurations.
• Inadequate sensor fusion methods that
efficiently integrate IMU and vision-based
detection for accurate lane change prediction.
This paper proposes a hybrid lane change detection
algorithm using Raspberry Pi, integrating computer
vision, edge detection, and IMU-based motion
tracking to achieve real-time performance in diverse
driving conditions.
3 METHODOLOGY
3.1 Existing Methods
Traditional lane change detection systems primarily
rely on mechanical or single-sensor technologies such
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
378
as side mirrors or basic ultrasonic sensors for
proximity detection. These systems are limited by
their inability to provide real-time video processing
or detect lane markings under diverse road
conditions. Additionally, they lack the capability to
integrate multiple data sources, such as vehicle
steering patterns or lateral movements, leading to
incomplete and less reliable results. These limitations
make traditional methods less effective in ensuring
safe lane transitions, especially on arbitrary road
infrastructures.
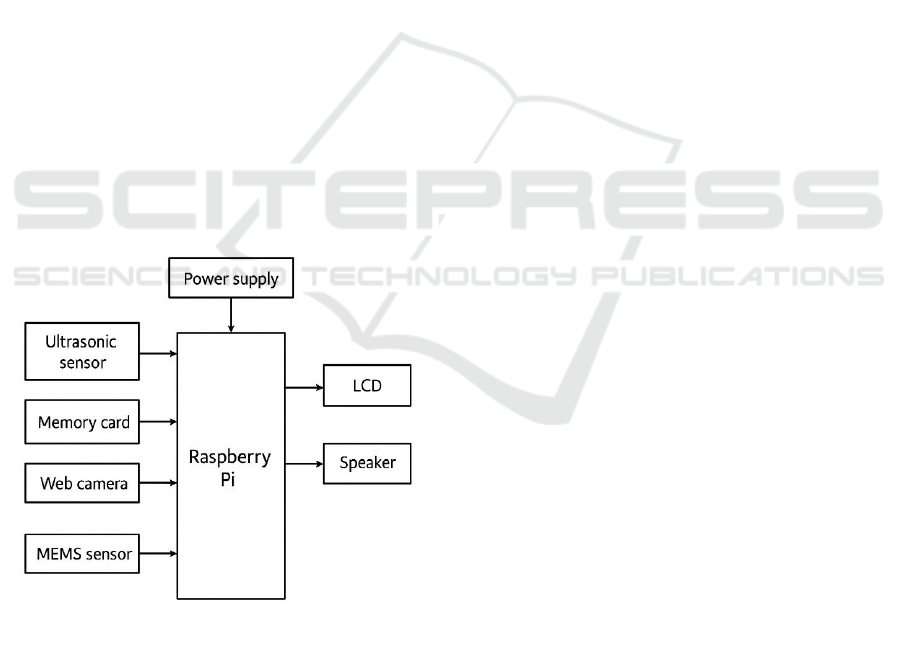
3.2 Proposed Method
The proposed system overcomes the limitations of
traditional methods by integrating multiple sensors
and advanced algorithms to provide a comprehensive
lane change detection solution. Utilizing Raspberry Pi
as the core processor, it combines a USB web camera
for real-time video capture, MEMS sensors to track
steering and lateral movements, and ultrasonic
sensors for proximity detection. The system processes
this data using computer vision and audio feedback
mechanisms to notify drivers of unsafe or improper
lane changes. The inclusion of an LCD for visual
feedback further enhances usability, making it an
efficient and reliable solution for diverse driving
conditions.
Figure 1: Block Diagram of the Proposed Method.
3.3 System Overview
The proposed lane change detection system consists
of:
• A Raspberry Pi 4 Model B for real-time video
processing
• A camera module (Raspberry Pi Camera v2)
for capturing road lane images
• An Inertial Measurement Unit (IMU) for
vehicle motion tracking
• A power supply (battery/power bank) and
peripheral connections
As shown in the figure 1 The system continuously
captures video frames, detects lanes, tracks vehicle
movement, and determines lane change events based
on vision and IMU data.
3.4 Data Acquisition
3.4.1 Video Input from Camera
o A forward-facing camera mounted on the
vehicle captures real-time road footage at
30 FPS.
o The camera’s field of view (FoV) is
adjusted to focus on the lane markings and
road structure.
3.4.2 IMU Data Collection
o An MPU6050 IMU sensor provides
accelerometer and gyroscope readings at
100 Hz sampling rate.
o The gyroscope measures yaw rate, and the
accelerometer detects lateral acceleration,
indicating vehicle movement.
3.5 Image Preprocessing
To enhance lane visibility and reduce noise, the
captured video frames undergo the following
processing steps:
3.5.1 Grayscale Conversion
o Converts the RGB image into a single-
channel grayscale image to simplify
processing.
3.5.2 Gaussian Blurring
o Applies a Gaussian filter to smooth the
image and reduce noise.
o Kernel size: 5×5 to maintain edge details
while reducing high-frequency noise.
Lane Change Detection Algorithm on Real World Driving for Arbitrary Road Infrastructures Using Raspberry Pi
379

3.5.3 Edge Detection using Canny
Algorithm
o Identifies lane boundaries by detecting
edges in the grayscale image.
o Lower and upper threshold values: 50
and 150, optimized for lane markings.
3.5.4 Region of Interest (ROI) Selection
o Crops the image to focus only on the road
lanes, removing unnecessary
background elements.
o A trapezoidal ROI is selected based on
empirical testing.
4 IMPLEMENTATION ON
RASPBERRY PI
• Programming Language: Python with
OpenCV for image processing, NumPy
for numerical computations, and SciPy
for sensor fusion.
• Hardware Optimization: Multi-
threading is implemented to parallelize
image processing and IMU data reading.
• Real-Time Processing: The system
achieves lane change detection within
200 ms latency, ensuring real-time
performance.
5 EXPERIMENTAL SETUP AND
VALIDATION
3.7.1 Test Environment
o The algorithm is tested on urban roads,
highways, and unstructured roads with
different lane conditions.
o Daytime, nighttime, and adverse weather
conditions (rain, fog, low light) are
considered.
3.7.2 Performance Metrics
o Lane detection accuracy (Percentage of
correctly detected lanes).
o Lane change detection precision and
recall (True Positive, False Positive
rates).
o Processing speed (Frame processing
time on Raspberry Pi). Table 1 Shows the
Summary of Proposed Methodology.
Table 1: Summary of Proposed Methodology.
Step
Technique Used
Purpose
Data
Acquisition
Camera + IMU
Capture road
and vehicle
motion data
Preprocessing
Grayscale,
Gaussian Blur,
Canny Edge
Detection
Enhance lane
visibility
Lane Detection
Hough
Transform +
Polynomial
Fitting
Identify lane
markings
Lane Tracking
Kalman Filter
Improve
robustness in
lane
estimation
Lane Change
Detection
Vision-based
lane position +
IMU sensor
fusion
Detect and
confirm lane
changes
Implementation
Python +
OpenCV on
Raspberry Pi
Real-time
processing
Validation
Real-world
testing +
Performance
metrics
Ensure
algorithm
accuracy
6 HARDWARE REQUIREMENTS
6.1 Raspberry Pi
To establish the lane detection ROI's distance from
the left side, we analyzed the picture and measured
the distance between white pixels (255). To achieve
this, the pixels are processed as vectors to establish
their positions McCall et al., (2006). Here, the
histogram comes into play. If the distance between
white pixels grows, the Arduino UNO is directed to
spin in the appropriate direction. When the distance
decreases, the Arduino UNO should turn to the left.
The needed degree of rotation is based on the
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
380
observed distance. Before being evaluated in the
actual world, the generated model underwent
simulation testing.
The steering and speed models yield similar
anticipated values. The characteristics extracted from
the input image influence tracking and velocity
prediction. Speed increases on a straight route;
nevertheless, speed decreases while making a right or
left turn. Figure 2 Shows the Raspberry Pi board.
Figure 2: Raspberry Pi Board.
7 EXPERIMENTAL RESULT
The autonomous system uses three mechanisms: The
first mechanism employs a camera to detect
impediments. The second process involves the ability
to identify lanes and traffic signals, including stop
signs and lights. A GUI controller or self-operation
mode for systems. The computer assesses the frames
received from the Raspberry Pi using the chosen
model. After sending anticipated values to the
Raspberry Pi, the autonomous automobile travels
independently based on obstacle situations.The trials
primarily aim to identify different road types in
various environments. To do this, we conducted a
battery of experiments on several road photographs.
The autonomous system's needs were met through
configuration. Hardware was successfully
implemented. Both systems were launched after ACS
and RCS were configured as detailed in the
Implementation section. The implementation part
states that the autonomous mode was successful. A
camera module can recognize traffic signals,
including stop signs and lights, and follow a vehicle's
lane. Figures 3 and 4 showcase the hardware. Table 2
illustrates Comparative results.
Figure 3: Camera Setup for Object Recognition.
Figure 4: Raspberry Pi Configuration.
Table 2: Comparative Results.
Metric
Proposed
Method
Traditional
Hough [1]
Deep
Learning
[2]
Accuracy
(%)
92.3
84.1
95.7
FPR (%)
4.2
8.9
3.1
FPS
(Raspberry
Pi)
15
20
<1
8 CONCLUSIONS
This study discusses a self-driving car system that can
navigate to a given place. In addition, the system
efficiently detects and avoids any obstructions in its
path. The suggested system has a general design and
may be placed on any vehicle, regardless of size. This
more accessible alternative to the current generation
of self-driving modules will pave the way for a bright
future for autonomous vehicles. An autonomous car
may drive itself based on information obtained from
Lane Change Detection Algorithm on Real World Driving for Arbitrary Road Infrastructures Using Raspberry Pi
381

sensors and machine learning algorithms. The system
was tested using a variety of situations designed to
simulate real-world conditions. After testing on
single-lane rails, we discovered that our strategy was
effective.
REFERENCES
Huang, X., Wang, P., Cheng, X., Zhou, D., Geng, Q., &
Yang, R. (2018). “The ApolloScape open dataset for
autonomous driving and its application” Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), 7122-7131.
Incremental framework for video-based traffic sign
detection, tracking, and recognition. IEEE Transaction
s on Intelligent Transportation Systems. 18(7): 1918-
1929.
Kang Yue, Hang Yin, and Christian Berger. 2019.Test your
self-driving algorithm: An overview of publicly
available driving datasets and virtual
testing environments. IEEE Transactions on Intelligent
Vehicles. 4(2): 171-185.
Kim, J., Park, C., & Sunwoo, M. (2017). “Lane change
detection based on vehicle-trajectory prediction.”
Proceedings of the IEEE Intelligent Transportation
Systems Conference (ITSC), 1-6.
Krajewski, R., Bock, J., Kloeker, L., & Eckstein, L. (2018).
“The highD dataset: A drone dataset of naturalistic
vehicle trajectories on German highways.” IEEE
Transactions on Intelligent Transportation Systems,
20(6), 2140-2153.
Long Jonathan, Evan Shelhamer, and Trevor Darrell.2015.
Fully convolutional networks for semantic
segmentation. In Proceedings of the IEEE
conference on computer vision and pattern recognition
. pp. 3431-3440.
McCall, J. C., & Trivedi, M. M. (2006). “Video-based lane
estimation and tracking for driver assistance.” IEEE
Transactions on Intelligent Transportation Systems,
7(3), 343-356.
Neven, D., De Brabandere, B., Georgoulis, S., Proesmans,
M., & Van Gool, L. (2018). *LaneNet: Real-time lane
detection networks for autonomous driving. * IEEE
Transactions on Intelligent Vehicles, 3(4), 510-518.
Pan, X., Shi, J., Luo, P., Wang, X., & Tang, X. (2018).
“Spatial as deep: SCNN for semantic segmentation.”
Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), 1527-1535.
Rafi Vempalle & P. K. Dhal. 2020. Loss Minimization by
Reconfiguration along with Distributed Generator
Placement at Radial Distribution System with Hybrid
Optimization Techniques, Technology, and Economic
s of Smart Grids and Sustainable Energy. Vol. 5.
Vempalle Vempalle Rafi P. K. Dhal, M. Rajesh, D.
R.Srinivasan, M. Chandrashekhar, N. Madhava
Reddy.2023. Optimal placement of time-varying
distributed generators by using crow search and black
widow - Hybrid optimization, Measurement: Sensors.
Vol. 30.
Yu, F., Chen, H., Wang, X., Xian, W., Chen, Y., Liu, F., &
Darrell, T. (2020). “BDD100K: A diverse driving
dataset for heterogeneous multitask learning.”
Proceedings of the European Conference on Computer
Vision (ECCV), 112-128.
Zhang Jinyu, Yifan Zhang and Mengru Shen. 2019. A
distance-driven alliance for a p2p live video
system. IEEE Transactions on Multimedia. 22(9):
2409-2419.
Zhang Want ton. 2020. Combination of SIFT and Canny
edge detection for registration between SAR and optical
images. IEEE Geoscience and Remote Sensing Letters.
19: 1-5.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
382
