
A Distributed Real‑Time IoT System with Multiple Modes for Urban
Traffic Management
Ajay Vijaykumar Khake
1
and Syed A. Naveed
2
1
Department of Electronics and Computer Engineering, CSMSS Chh. Shahu College of Engineering, Chhatrapati
Sambhajinagar‑431011, (Aurangabad), Maharashtra, India
2
Head Department of Electrical and Computer Engineering, Jawaharlal Nehru Engineering College, Chhatrapati
Sambhajinagar‑431003, (Aurangabad), Maharashtra, India
Keywords: Sliding Windows, Edge Computing, Traffic Control, Deep Neural Networks, Emergency Vehicle Detection,
Vehicle Detection.
Abstract: Traffic congestion is one of the growing urban problems that contributes to other problems including wasting
fuel and death as well as non-productive usage of work time. Note: Round robin algo+programming logics
are used in the heinous system7590183. While several recent works have proposed Internet of Things (IoT)-
based frameworks to control the traffic flowing based upon the density information of each lane, the accuracy
of these proposals is inadequate simply because there are too few images datasets regarding emergency
vehicles existing, which could be used to train deep neural networks. In this research, motivated by two
findings, we expected a contributing IoT pathway for a novel distributed IoT framework. The first insight is
that major structural changes are rare. To leverage this observation, we propose a new two-stage vehicle
detector achieving 77% vehicle detection recall on the UA-DETRAC dataset. This means that the second
finding is that the emergency units differ from other cars due to the sound that sirens make, where they are
detectable using an acoustic detection mechanism that is processed at the edge through an Edge device.
Proposed approach yields 99.4% average detection accuracy of emergency vehicles.
1 INTRODUCTION
Traffic jam is a controlling issue of the popular cities.
A major factor for this problem is the disparity in the
expansion of road network versus traffic volume. The
clearest negative consequences on tourists and
metropolitan areas in general include increase in that
global carbon footprint, low productivity, wastage of
fuels with the ecological balance collapsing, and
natural losses like deaths and financial revenues
falling down. To address the urgent issue,
governments have invested heavily in upgrading
infrastructure, including complex civil works such as
new roads, bridges, and additional lanes. Yet this
response has added to the complexity of the
dilemma. Major cities that have extended this
approach, like London, are now facing issues such as
pollution, stagnation and urban sprawl. This will not
be good since the number of vehicles on our roads is
expected to increase rapidly. In line with this
objective the world is focusing towards decreasing
scope emissions from vehicle transportation to secure
a sustainable future.
1.1 A Multi-Modal Distributed Real-
Time IoT System for Urban Traffic
Control
The majority of cities employ a conventional traffic
control system that permits traffic to go in a circle for
each lane using a round-robin scheduling algorithm
and a variety of programming logic controllers
(PLC). Nevertheless, there are not many pilot studies
on the implementation of intelligent traffic control
systems powered by the Internet of Things (IoT). The
majority of these experiments have contributed to the
rollout of automated, networked, and self-driving
automobiles. An IoT system is required for existing
on-road vehicles due to the uncertainty surrounding
the future of self-driving automobiles and the
pressing need to meet decarburization targets. Recent
technologies such as GPS, RFID, Bluetooth, Zigbee,
and infrared cameras have not been incorporated into
256
Khake, A. V. and A. Naveed, S.
A Distributed Realâ
˘
A
´
STime IoT System with Multiple Modes for Urban Traffic Management.
DOI: 10.5220/0013881100004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 2, pages
256-261
ISBN: 978-989-758-777-1
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

many IoT frameworks. Nevertheless, these
technologies necessitate the installation of a variety
of sensors in automobiles. These technologies are
expensive and energy-intensive to upgrade the
current cars, and because they are sensitive to
environmental noise, the detection accuracy of traffic
density estimation is not very good.
This work proposed a new framework called IoT-
based Intelligent Urban Traffic System (I2UT S) to
control the signal light and overcome the problems
mentioned above. This framework was created
through the present CCTV network. CCTV footage
has been useful and fairly inexpensive in the past.
Over the years, various studies have used CCTV
camera networks as input sensors to address different
traffic issues, such as predicting accidents Balid, W.,
Tafish, H., & Refai, H. H. (2017)., studying the
spatiotemporal behaviour of pedestrian crossing and
detecting knives and firearms Chen, L., Englund, C.,
& Papadimitratos, P. (2017). The traffic density was
estimated using the I2UT S framework, supported by
state-of-the-art CNN and CCTV footage. Traffic
density was one of the most important factors that
affect the controlling of traffic signal. In addition to
addressing the privacy issue we employed Yolo v3
with a darknet backbone for computational resources
using an edge device, Raspberry Pi, with the
proposed scheduling mechanism. Although its I2UT
S score of 68.10% revealed vehicle detection
performance among the best-in-class, its end-to-end
convolutional neural network (CNN)-based visible
light data demanded a TD and CV for run processing
that has been too large to provide any useful real-
time traffic network pedagogy.
The first challenge with database of vehicles was
that of I2UT S, so the innovative feature was how to
introduce the state of emergency vehicles such as
police cars, fire engines, ambulances into traffic
signal periods, and coordination of traffic signal
periods with comprehensive scheduling algorithm of
vehicles. It was difficult to find a labeled dataset of
the emergency vehicle because the suggested CNNs
Yolo v3-Efficient Net rely on labeled data. Given the
infrequent presence of emergency vehicles in traffic,
locating such a dataset is difficult. One area of
research has been the proposal of emergency vehicle
datasets. In addition to manually annotating 1500
photographs, researchers have also used YouTube
streaming, Google search, and manual filtering of
images from the Kaggle dataset. These datasets suffer
from significant viewpoint fluctuations due to the
combination of many picture acquisition sources,
making them inappropriate for our Internet of Things
system since the CCTV camera, the input sensor, has
a fixed viewpoint. Weather variation is another issue
with emergency vehicle detection, in addition to
viewpoint variance. The accuracy of vehicle detection
is frequently greatly reduced by unfavorable weather
conditions visible in the photos. Non-emergency cars
are more common on CCTV photos for a set period
of time since their speeds are relatively slow.
Together with the availability of a sizable collection
of tagged photos in various weather conditions as a
training input for YOLO V3, this improves their
detection accuracy. These issues make it abundantly
evident why emergency vehicles are not permitted to
use RGB cameras. This is a strong incentive to revisit
our earlier work on emergency vehicle detection
using I2UT S. Around the world, emergency vehicles
utilize sirens, which are loud noises, to warn
oncoming traffic. In this study, we present a multi-
modal distributed Internet of Things framework that
uses image-based traffic density estimation in
conjunction with the ability to identify the unique
sound characteristics of emergency vehicles.
One prominent second issue with I2UT S is the
high variance of mean average precision (mAP)
between classes of vehicle detector however the "van
class" which returned a mAP of 37.49%, acted as an
n outlier. The proposed YOLOV3-Effecient net also
demonstrate a significant false positive (FP) over true
positive (TP) count for "van" at FDR = 63.23% (not
shown here). YOLO outperforms two stage object
detectors such as RCNN because of its speed on edge
devices. However, there is some drawback in YOLO
such as it cannot estimate the optimal number of
clusters and also cannot localize small objects and
vehicles. This is one of the primary reasons for why
the I2UT S has a high rate of false positives in
classifying bus stops as scooters, given their similar
characteristics. Two-stage detectors introduce an
additional stage for region proposals, whereas single
stage detectors sample region densely and classify
and localize all objects in one pass.
Although the region proposal stage improves
object detector performance, it is computationally
costly. Nevertheless, the CCTV camera on the road is
stationary, making it difficult to change the viewpoint
of the pictures it takes. Road infrastructure has not
changed much either. In light of this benefit, we
suggest a brand-new two-stage detector road-based
YOLO ("R-YOLO") that limits vehicle searches to
the road with low computational resource
consumption similar to single-stage detectors (like
YOLO) and improved performance accuracy
comparable to two-stage object detectors (like
RCNN).
A Distributed Realâ
˘
A
´
STime IoT System with Multiple Modes for Urban Traffic Management
257
This is how the rest of the paper is structured. The
suggested IoT framework is explained in Section II.
Section III provides specifics on the experimental
assessment and outcomes of the suggested distributed
system. Section IV presents the conclusion at the end.
1.2 Proposed Distributed IoT
Framework
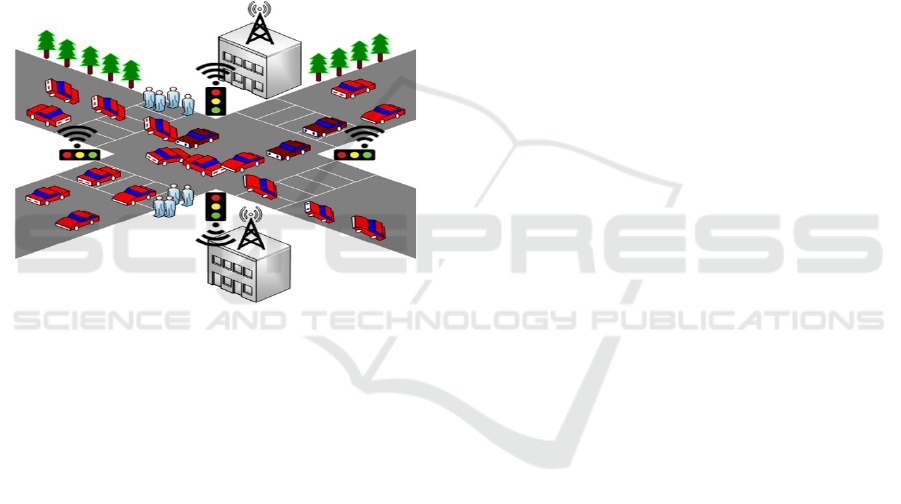
There are two edge components in the suggested
distributed IoT-based urban traffic management
system. 1) S
1
: R-CNN is a Deep Neural Network-
based vehicle detector. 2) S
2
: Emergency Vehicle
Detector that detects emergency vehicle sirens using
an acoustic sliding window technique.
Figure 1: A Multi-Modal Iot Distributed Framework.
1.3 A Multi-Modal Distributed Real-
Time IoT System for Urban Traffic
Control
Edge Devices and Sensors Data-Driven Distributed
Real-Time IoT System for Urban Traffic Multi-
Agent Association Edge Device & Sensor: Previous
works used NVIDIA Jetson TX2, the
aforementioned computationally intensive edge
device with dual support for CPU and GPU. In its
average comparisons, the Jetson Nano is indicated to
be at 24x the cost of other edge devices. To comply
with the economic feasibility aspects of the integral
of the whole system, we select the Raspberry PI 4 as
the fog device S1 for the vision algorithms. It boasts
a powerful quad core cortex-A72 (Arm-8) 1.5GHz
CPU and decent amount of memory (4 GB).
The Edge device S2 in the acoustics emergency
vehicle detector is an Arduino Nano. The open source
Arduino Nano microcontroller is based on the
ATmega328P architecture. It uses a SEN0232 noise
meter, with 32 KB flash memory, 16 analog pins and
22 I/O pins. Using an instrument circuit and a low
noise microphone, the SEN0232 measures the noise
level of the surrounding environment with great
accuracy. The noise level ranges from 30dBA to
130dBA.
2 SYSTEM OVERVIEWS
A higher-level overview of the distributed system is
as follows.
2.1 Cloud Layer: Road Detector
a. Use a cloud-based Faster-RCNN network to
detect cars.
b. Estimate the road mask after detecting the
object road.
c. To detect the road, train the YOLO v3
network using Efficient Net as the cloud's
backbone.
d. For testing, move the learned weights to the
Faster RCNN installed on the edge device
S1.
e. To extract roads, move the road mask to the
edge device S2.
Edge S1: Vehicle Detector
a. Use the YOLOv3 vehicle detector and road
mask to identify cars in order to estimate the
traffic density of each road lane.
b. Supply the suggested traffic control
algorithm with the parameters produced in
the earlier stages.
2.2 Dataset
In many recent experiments, the KITTI and COCO
datasets were used to train the YOLOv3 network.
Thus, UA-DETRAC, as a fancier dataset created by
University of Albany where focus is on items
recognition and tracking, stands the most
sophisticated one by providing a benchmark dataset
on multi-item tracking in the real environment. The
dataset consists of 10 hours of 25 fps recordings from
960 x 540 px traffic cameras. The footage
encapsulates a high-of-diversity, intercutting clips
from 24 different sites to Beijing, and Tianjin, China.
UA-DETRAC contains approximately 1.21 million
annotated bounding boxes over 8250 annotated
vehicles, including four classes car, van, bus road
and others. Sample images from the CCTV dataset
are shown in Figure 2. The other strength related to
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
258

UA DETRAC is its capability of simulating multi-
class of weather such as fog, rain and day-night
illumination as well. The dataset has two
applications, as road and vehicle detectors. The data
has been split into train, validation and test sets in a
70:15:15 ratio for each task.
Figure 2: Sample Cctv Images from Ua-Detrac.
2.3 DNN for Road Detection
We employ the YOLO v3 CNN model, which was
trained on the foundation of Efficient Net, for road
identification and categorization. Our network has a
high object detection accuracy at low inference
latency, in contrast to the conventional YOLO v3
model, which depends on the DarkNet-53 network as
its backbone. Since there have been few changes to
the road infrastructure, we can presume that CCTV
images benefit from perspective invariance. Study
choose the road bounding box by pooling the region
of interests since cars travel on roads and their
bounding boxes are embedded within the road's
bounding box. We compute the road mask after the
bounding box has been chosen. When applied to
CCTV footage, a road mask is a binary image that
removes all other images (turning the pixels black)
except for the road item. Regions of interest can be
limited with the use of the Road Mask picture. The
CCTV image obtained after applying a road mask is
displayed in Figures 3b, 3d, and 3f.
2.4 DNN for Vehicle Detection
It employs the Faster R-CNN model for vehicle
identification and classification into five annotation
classes: road, vans, buses, cars, and others. Because
of the region proposal network, R-CNN is many times
quicker than standard regional-based CNN. Its
pooling feature is also quite advantageous, though.
Compared to single shot detectors such as YOLO,
faster RCNNs are more accurate. However, compared
to YOLO, the inference speed is incredibly slow,
making it inappropriate for edge devices' real-time
object detection. In order to get around this, we input
the image with a road mask to limit the scope. As a
result, Faster R-CNN will only identify items on the
road, greatly minimizing the image's size and object
count, which will shorten processing time.
2.5 Acoustic Emergency Vehicle
Detection Framework
When measured 10 feet in front of the sound source,
the majority of sirens have a 124-dB rating. The
siren's sound pressure will decrease by about 6dB as
the distance from it doubles. This idea is referred to
as the "inverse square law." Our system uses a sliding
window technique to recognize emergency vehicles
and collects data at a frequency of 50 Hz, a sliding
window calculates the area of the sound noise level
over a specific time period. The detection algorithm
triggers the emergency light sequence when the area
surpasses a certain threshold. If not, the standard
procedure is followed. The formula is used to
calculate the area value.
Area = F frequency × sound level (1)
2.6 Multi-Modal Distributed
Real-Time IoT System for Urban
Traffic Control
The noise levels are added up across a specified
window, and the algorithm is continually calculating
the area over the window duration. The maximum
sound level is set at 100 dB; this level was selected to
accommodate for the ambulance's varying distances
from the sound sensor. Since the noise level varies
between 124dB and 76dB, it has been selected as the
average noise level while considering 80 feet (25m).
The Edge gadget S2 generates a trigger as soon as
the siren is detected. As seen in Figure 1, this is
transmitted to edge device S1. Edge Device S1 uses
the vision algorithm described in Section 2.2.3 to
assess the vehicle density of each lane. Both of these
characteristics are used by the Traffic Control
Algorithm that we proposed in our previous work in
I2UT S to compute the traffic light sequence once
again on edge device S1. Our architecture is multi-
modal, combining visual and audio sensors and
processing to create a robust system.
A Distributed Realâ
˘
A
´
STime IoT System with Multiple Modes for Urban Traffic Management
259
3 EXPERIMENTATION AND
RESULTS
The performance of our suggested distributed IoT
framework is assessed in this section. The Faster
RCNN and YOLO v3-Efficient Net weights are
trained on a cloud server running Linux 18.04 with an
Intel i7-9th generation CPU as the primary processor
and a Nvidia 1660Ti GPU. The Cudnn 7 libraries and
CUDA 10.1 were utilized for GPU parallel
processing. The Raspberry Pi 4 edge device, which
runs Raspbian Buster, includes a quad core cortex-
A72 (Arm-8) 1.5GHz processor, 4GB of RAM, and
OpenGL ES 3.0 graphics.
An Arduino Nano is connected to a SEN0232
sound meter via an SPI serial connection as part of the
experimental configuration for the edge system.
Additionally, this edge device is wirelessly or via
USB connected to the Raspberry Pi. The edge device
in charge of controlling the traffic light sequence is
the Raspberry Pi.
3.1 Emergency Vehicle Detection
To determine the ideal window lengths, experiments
were carried out. Several window sizes, ranging from
0.5 to 10 seconds, were selected in order to achieve
this. The window duration is increased by 0.5 seconds
following each trial. Ten distinct sounds are played
for each window size, three of which are emergency
vehicle sirens (police, ambulance, fire truck), with the
remaining sounds being various urban noises. Both
the detection accuracy and detection time are
measured. The entire process is carried out 100 times.
The difference between when the siren is first heard
(Td) and when the sound is played (Tp) is the
detection time (Dt).
D
t
= T
d
− T
p
(2)
The number of sirens sounds that were really
predicted is the definition of detection accuracy. Ps
and the number of urban noises that were really
predicted (Pu) divided by the total number of tests (N).
Accuracy =
(3)
Table 1: Accuracy and Detection Time Per Window Size.
Window
Len
g
th
(
s
)
0.5 2 3.5 5 6.5 8 9.5
Detection
Accuracy
(
%
)
65.2 902 96.3 99.5 98.4 99.1 99.7
Detection
Time(s)
0.59 2.036 .614 5.124 6.681 8.052 9.681
The above table 1 displays the results, which
reveal that accuracy is quite low for small window
sizes. This is mostly because it interprets many urban
noises as siren sounds. The detection algorithm
functions as a threshold detection when the window
sizes are small. The accuracy reaches a maximum of
99.5% at 5 seconds and remains reasonably constant
as the window length increases. Just five sound
segments out of 1000 were incorrectly classified, and
these
Parts are part of the sounds of the city. The
average detection time for the various experiments is
0.03 ± 0.007 seconds. The maximum accuracy is
attained for 5s, and it is chosen for use. Another
argument is that a faster detection is more effective.
3.2 Vehicle Detection
It makes sure the model approaches optimality by
avoiding overfitting and underfitting when training
and adjusting the hyper-parameters of both the DNNs
for vehicle and road detection. The number of epochs
is the most crucial hyperparameter that requires fine-
tuning. We exhibit the number of epochs in relation
to the difference between training and validation
losses to ascertain this.
Inference time is another crucial indicator of a
vehicle detecting system's effectiveness. Our DNN's
inference time on the Raspberry Pi's edge divice S1
ranged from 1.65 to 2.5 seconds per frame. The state-
of-the-art I2UT S framework, which has inference
times of 1.55 to 1.67 seconds per frame, is
comparable to this. The following table 2 shows the
Raspberry Pi 4 edge device's power consumption per
second under various loads. DC 5.1V and 3A were
the input voltage and current to the edge device.
When the detector was used in conjunction with a
monitor, the maximum power consumption recorded
was 7.192 W, which accounted for only half of the
input power.
Table 2: Power Consumption of Iot Device on Different
Loads.
Parameters
Current
(Amps)
Voltage
(Volts)
Power
(Watts)
IoT device not
connected to monito
r
0.86 5.9 3.16
IoT device connected
to monito
r
0.88 5.6 3.55
IoT device running
only detecto
r
1.44 5.33 6.91
IoT device running
detector with
connected monito
r
1.4 5.31 7.192
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
260

Its power consumption dropped to 6.91 W when
it was attached to a traffic camera. The state-of-the-
art framework I2UT S achieves a mean average
precision (mAP) of 65.10%, whereas the vehicle
detection DNN achieves 78.6%. It can confidently
state that our suggested novel two-stage detector R-
YOLO can achieve higher accuracy in comparable
inference time if the metrics of accuracy and
inference time are considered combined.
4 CONCLUSIONS
This study suggests a distributed Internet of Things
framework for an urban traffic control system that
makes use of sound sensors and CCTV cameras. The
two key findings in urban traffic control are used by
the framework: The structural Road modifications are
minimal. An emergency Automobiles makes a unique
sound. By identifying roads in the first stage and
automobiles in the second, the innovative two-stage
detector takes advantage of the first observation. The
network may be trained on numerous datasets of
CCTV footage with viewpoint and illumination
fluctuation to further improve the detector's 78.6%
accuracy. With an accuracy of 99.4%, the second
observation is implemented using an auditory sliding
window detection technique.
REFERENCES
Abdel-Aty, M., & Pande, A. (2006). Identifying crash
propensity using real-time traffic data. Journal of Safety
Research, 37(5), 511-522.
Al-Sakran, H. O. (2015). Intelligent traffic information
system based on integration of Internet of Things and
Agent technology. International Journal of Advanced
Computer Science and Applications, 6(2), 37-43.
Balid, W., Tafish, H., & Refai, H. H. (2017). Intelligent
vehicle counting and classification sensor for real-time
traffic surveillance. IEEE Transactions on Intelligent
Transportation Systems, 19(6), 1784-1794.
Bhat, C. R., & Adnan, M. (2016). Incorporating the
influence of multiple time-of-day periods and modal
flexibility in travel mode choice modeling.
Transportation Research Part B: Methodological, 91,
470-490.
Chen, L., Englund, C., & Papadimitratos, P. (2017). Real-
time traffic state estimation with connected vehicles.
IEEE Transactions on Intelligent Transportation
Systems, 18(7), 1814-1822.
García, J., Jara, A. J., & Skarmeta, A. F. (2015). A
distributed IoT-based traffic management system.
Sensors, 15(12), 31536-31553.
Ji, Y., Li, M., & Wang, Z. (2019). Smart traffic
management system for urban road network using IoT
and cloud computing. IEEE Access, 7, 95199-95209.
Li, R., & Wang, Y. (2020). A real-time adaptive traffic
signal control system using deep reinforcement
learning. Transportation Research Part C: Emerging
Technologies, 112, 346-364.
Rath, M., & Sharma, A. (2021). Role of IoT in smart traffic
control: Challenges and future scope. Internet of
Things, 13, 100355.
Zheng, Z., Lee, J., & Moura, J. M. (2018). Distributed urban
traffic control with IoT-enabled infrastructure. IEEE
Internet of things Journal, 5(6), 4555-4564
A Distributed Realâ
˘
A
´
STime IoT System with Multiple Modes for Urban Traffic Management
261
