
Enhanced Traffic Shaping for Low‑Latency Communication in
Autonomous Vehicle Networks
Mohammed Shameem S., Naveen P. R., Prajith R., Rahul V.,
Dhanasekar J. and Ishwarya Niranjana M.
Department of ECE, Sri Eshwar College of Engineering, Coimbatore, Tamil Nadu, India
Keywords: Autonomous Vehicles (AVs), Traffic Shaping, Low‑Latency Communication, Real‑Time Operations,
Safety‑Critical Systems, High‑Priority Packet Management, MATLAB Simulations, Network Performance,
Vehicle Density, Communication Delays.
Abstract: Smart transportation powered by AVs necessitates reliable, low-latency communication to support real-time
and safety-critical tasks. 39Uncoordinated data dynamics, which can occur as applications transmit through
different paths (including in-Memory parameters), can lead to interference where one transmission degrades
the quality achieved by the other transmission. This work presents a better traffic shaping process meant for
the unique needs of cooperative autonomous vehicle networks. For instance, the implemented solution ensures
the timely delivery of collision avoidance messages by competing packets whereas the prioritization of low
priority packets, such as routine navigation data, is optimized. Traffic shaping models of the proposed model
is evaluated through MATLAB based simulations considering the variation of traffic model parameters like
the vehicle density, packet arrival rate, and communication delay. We find that using this mechanism yields
a significant reduction in latency for high priority traffic with limited impact on the handling of low priority
packets. These results highlight the promise of this approach for improving communication reliability and
enabling safer, more efficient autonomous transport networks.
1 INTRODUCTION
Autonomous vehicles (AVs) are being integrated into
transportation systems, which offer considerable
opportunities for improving safety, traffic flow, and
mobility, but also creates significant communication
challenges. AVs depend on so-called high-time-
critical data, which should be exchanged with
minimum delay and guaranteed reliability, for tasks
such as collision avoidance, emergency braking, and
navigation (G. Karagiannis et al., 2011).
Conventional traffic shaping in vehicular networks
focuses on prioritizing messages that typically lead to
delays and congestion; however, in AV networks,
such strategies will not sufficiently achieve the ultra-
low latency (required for safety-critical messages)
and efficient management of lower priority messages
(e.g., navigation update). It is critical to prioritize this
data, as lack of prioritization may result in network
congestion and/or communication delays that lead to
failures of these safety systems.
The work in this paper presents an advanced
traffic shaping methodology that has been
specifically designed for AV networks, utilising
adaptive queuing strategies that give due priority to
real-time, safety-related data, whilst still supporting
the effective transmission of lower priority data. It is
then evaluated through Matlab simulations regarding
the packet latency and queue management,
considering different vehicle densities and
communication delays. Prototyping and testing the
dynamic priority model yields results that showcase
lower latency for higher priority traffic through
higher priority packets gaining precedence while
maintaining reasonable delays for lower priority
packets.
2 LITERATURE SURVEY
The deployment of autonomous vehicles (AVs) into
contemporary transportation systems has generated
substantial research efforts on communication
S., M. S., P. R., N., Prajith, R., Rahul, V., Dhanasekar, J. and M., I. N.
Enhanced Traffic Shaping for Lowâ
˘
A
´
SLatency Communication in Autonomous Vehicle Networks.
DOI: 10.5220/0013880900004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 2, pages
249-255
ISBN: 978-989-758-777-1
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
249

systems that enable real-time, safety-critical
functionality. Multiple studies have emphasized the
need for low-latency communication for AVs,
particularly for functions such as collision avoidance
and emergency braking. In conventional vehicular
networks, traffic shaping techniques are utilized to
control the flow of data by giving priority to the high-
priority packet in order to alleviate delays. But, these
methods are not well-suited to cope with the
challenges specific to AV communication, such as
the necessity for ultra-low latency for safety critical
messages which runs in parallel with less time critical
traffic for navigation updates.
To reduce latency for high priority at the expense
of fairness for low priority such as standard messages,
adaptive queuing and packet scheduling techniques
have been an important target of effort in recent work.
In addition, researchers have investigated the effects
of network congestion, vehicle density, and
communication delays on system performance,
underscoring the importance of scalable approaches
that prioritize both reliable communication and
efficient operation in dynamic, high-density
scenarios.
3 PROBLEM STATEMENT
With the increased penetration of autonomous
vehicles (AVs) within the modern transportation
system, the importance of providing communication
to guarantee safety and efficiency with low latencies
is becoming pressing. AVs depend on the real-time
exchange of data to perform actions like collision
avoidance, emergency braking and precise
navigation. But with increasing vehicle density and
data traffic complexity, keeping vehicles in touch is
a challenge.
The increasing amount of data (both critical safety
messages and non-critical messages) floods the
network and delays the transmission of the required
messages. Conventional traffic management and
shaping methods for traditional vehicular networks
are inadequate for meeting the specific demands of
AV networks. These networks require ultra-low
latency for high-priority packets such as emergency
alerts, alongside handling non-critical data such as
navigation and infotainment updates. In the absence
of an effective system for dynamically prioritizing
and processing this traffic, the system faces unsafe
latency, degraded network performance or worse a
safety failure.
In addition, there is an urgent need for an
advanced traffic shaping mechanism of specific
demands to AV networks. This mechanism will need
to ensure that safety critical messages are received in
preference to less time-critical traffic while
improving latency and maximizing bandwidth
efficiency. Solving this problem is crucial for
ensuring the safe, scalable and effective deployment
of autonomous vehicle solutions in ever more
dynamic and congested transportation environments.
4 PROPOSED SOLUTION
This phenomenon is a consequence of the fast-
growing role that autonomous vehicles (AVs) play in
modern transportation systems which brings new
communication challenges that are critical to
ensuring both safety and operational efficiency of
these systems. Autonomous vehicles (AVs) depend
on near real-time data sharing with roadside
infrastructure and surrounding vehicles to execute
critical safety maneuvers (e.g., collision avoidance,
emergency braking) and improved navigation (e.g.,
route optimization). For these systems to operate as
intended, high-priority safety messages need to be
sent with ultra-low latency. While high-priority
safety messages need priority over lower-priority
traffic such as navigation and infotainment data,
current traffic management systems have limitations
in ensuring this. As a result of this asymmetric
communication, network congestion, communication
delays, and safety-critical applications are likely to
fail, jeopardizing the overall reliability of
autonomous systems.
To overcome such challenges, we present an
improved traffic shaping framework that tailored for
autonomous vehicle networks. The method would
prioritize the transmission of high-priority packets
like collision avoidance alerts and emergency braking
signals, while allowing it to just make sure low-
priority traffic like navigation updates and
infotainment data are still sent efficiently. This
technique applies adaptive queuing techniques,
which allow timeliness of safety-critical messages to
be guaranteed, even under high network load
conditions. For safety-critical messages, the system is
designed to alleviate congestion and minimize
communication latency by efficiently handling both
high- and low-priority traffic.
Proposed system experiment: MATLAB
simulations are tested due to the proposed system
performance under different simulation conditions
(different vehicle density/packet arrival
rate/communication delay). Results show that the
proposed traffic shaping mechanism achieves latency
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
250

compliance for high priority messages while low-
priority traffic transmission is also guaranteed at low
delays. This scalable and efficient solution meets the
communication requirements of autonomous vehicle
networks, enabling reliable data exchange for both
critical safety applications and non-critical services.
The model serves as a solid foundation for upholding
both the safety and operational efficacy of AVs
functioning in dynamic and congested network
surrounding.
Traffic Shaping Mechanism Overview: Traffic
shaping is a mechanism to adjust the transmission of
packets to a narrower bandwidth in order to constrain
it below the full rate to avoid congestion in networks
in order to implement Data flow management.
Conventional networking systems utilize queuing
techniques like First-Come-First-Served (FCFS),
Priority Queuing (PQ), as well as Weighted Fair
Queuing (WFQ) when it comes to packet
prioritization. Whilst these approaches perform well
in many contexts, they often struggle to satisfy the
strict latency requirements of autonomous vehicle
networks, particularly at high traffic loads, or, in
scenarios when multiple vehicles are communicating
simultaneously.
To overcome these limitations, we present an
adaptive queuing model that enables packets to be
classified as either high-priority or low-priority and
subsequently scheduled for transmission. This
approach aims to deliver the high-priority packets as
quickly as possible while avoiding the situation where
low-priority packets are delayed too long in high-
traffic situations. This is done by adapting to the
variations in the network conditions (packet arrival
rate, vehicle density, communication latency, etc.)
dynamically to sustain its efficiency in results. This
adaptive scheme aims to provide a flexible approach
to support safety-critical as well as non-critical
applications, enabling robust communication in
realistic autonomous vehicle networks.
Priority Queuing and Adaptive Scheduling: From
here, we can naturally build the proposed mechanism
of traffic shaping based on Priority Queuing (PQ),
which involves ordering packets into queues
depending on their priority. This helps to make sure
that critical data packets are processed and
transmitted before less crucial data packets are.
Leverage two high-level queues.
High-Priority Queue: This queue handles safety-
critical and time-sensitive messages, including
commands to initiate emergency braking, collision
notifications, and other real-time safety messages that
have to be processed quickly. But they need the
lowest possible latency to deliver information for
timely response where any delay can affect safety.
Low-Priority Queue: This queue processes low-
priority messages like navigation updates, weather
data or infotainment content. Although these packets
have to be sent, they can survive higher latencies
compared to high-priority traffic. That means only
the most important packets are processed first.
It only starts processing packets from the low-
priority queue when the high-priority queue is
empty. This also guarantees that safety-critical data
always receives the required bandwidth, no matter
how network traffic develops. Moreover, as the main
design goal of the protocol is to avoid starvation of
low priority traffic, the protocol includes an adaptive
scheduling component that adjusts the transmission
rate depending on the size of the queue and the state
of the traffic in the network. This allows both queues
to be processed very efficiently, especially during
peak loads.
Adaptive Queue Management: The proposed
method's respect for dynamic systems through
adaptivity makes it effective in time-varying
scenarios. Conventional static prioritization
approaches are often inadequate for addressing the
dynamic nature of the environment in autonomous
vehicle (AV) networks. We assume that the system is
capable of monitoring system factors such as traffic
density, packet arrival rates, and communication
delays, and dynamically adjusting its behavior based
on these inputs.
Just as the high-priority queue handles bursty
traffic, in a situation where the high-priority queue
becomes congested, the system reduces the
transmission rate of low-priority packets to set aside
additional resources for mission-critical traffic. In the
case of low-high priority traffic, the system rather
boosts the bandwidth of low-priority packets in order
to get the right ratio in both queues.
To enable this adaptability, we then employ a
Dynamic Time Slot Allocation (DTSA) mechanism.
It dynamically allocates time slots for transmission
based on the traffic load of each queue. By keeping
also some excess time slots reserved to send the
packets coming from the High-Priority queue in case
that that gets full, thus, significantly reducing the
chances of delays and/or packet loss. The lower
priority queue though, as that fills up, as those
packets are using longer time slots to be processed,
balances the load across both queues. It also takes
into consideration queue length and packet arrival
rates before making any adjustments. If packets are
fed continuously into a high-priority queue at a
Enhanced Traffic Shaping for Lowâ
˘
A
´
SLatency Communication in Autonomous Vehicle Networks
251
sufficiently high rate, for example, the system will
favor their transmission over low-priority traffic but
will also slow low-priority traffic as have needed for
the duration of that time. In the same way, more low-
priority traffic encourages the system to average out
the load by processing more low-priority traffic
packets than high-priority packets.
Latency Minimization and Queue Efficiency: A
fundamental goal of the proposed mechanism is to
reduce latency of the high-priority packets. AV
networks require safety-critical data to be delivered
promptly to avoid accidents or system failures. To
this end, we introduce a Guaranteed Latency
Mechanism (GLM) which guarantees transmission of
high priority packets in a bounded time interval.
The GLM dedicates a certain amount of transmission
time to high-priority packets irrespective of the
network load. This ensures latency requirements are
met for safety-critical messages. Once the high-
priority queue is empty, the reserved bandwidth is
realigned to handle low-priority packets, optimizing
the use of network resources.
The that aims to improve efficiency is the Queue
Length Monitoring algorithm. This approach
monitors the length of both queues in conjunction and
adapts bandwidth dynamically, ensuring that neither
of them becomes saturated. When queues cross a
critical threshold, resources are redistributed to
rebalance the system and prevent bottlenecks.
Simulation and Evaluation: The validation of the
employed traffic shaping mechanism has been
obtained using MATLAB simulations. The
simulations involved a fleet of autonomous vehicles
interacting with infrastructure in a typical urban
environment. This involved simulating real-world
conditions, including vehicle density, packet arrival
rates, communication delays, and changes in traffic
patterns.
The proposed mechanism achieves low latency
for high- priority packets, therefore ensures timely
delivery of safety-critical data as shown in simulation
results. At the same time, they shunted low-priority
traffic without adding too much latency. We
demonstrated the versatility of the adaptive queuing
model in sustaining reliability and scalability against
varying traffic models.
The results yield presents the viability of the
proposed system to enhance communication in the
autonomous vehicle network addressing both safety-
critical and non-critical applications in real-world
implementations.
5 RESULTS AND DISCUSSION
In this Section, we describe the MOM based
MATLAB simulations that are utilized to analyze the
performance of the proposed traffic shaping
mechanism for AV networks to achieve low-latency
communication. It used simulation-based evaluation
that compared the system's performance under both
high-priority and low-priority traffic in a variety of
networking scenarios. The conditions were various
vehicle densities, packet arrival ratios, and
communication delay. The only performance
indicators assessed in the simulations were the
latency of the high-priority and low-priority packets,
as well as statistical data about the queues and the
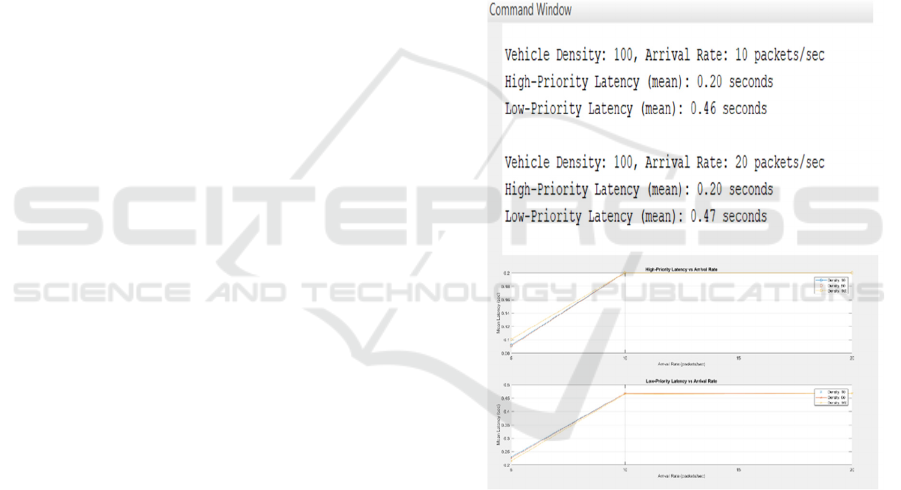
performance of the system. Figure 1- (Simulation of
Traffic Shaping in Autonomous Vehicle Networks).
Figure 1: Simulation of Traffic Shaping in Autonomous
Vehicle Networks -1.
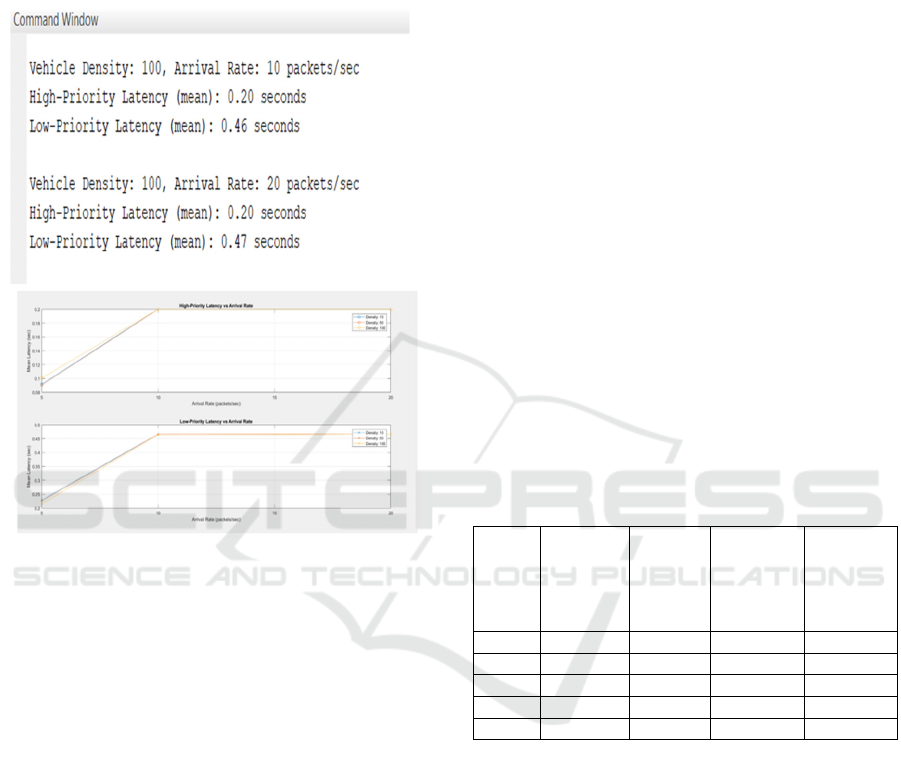
Figure 2 and 3 Simulation of Traffic Shaping in
Autonomous Vehicle Networks -2 and Latency
Comparison respectively.
High-Priority Packet Latency: The simulation
experiments showed that the performance of the
proposed traffic shaping mechanism significantly
decreases the latency of high-priority packets like
safety alerts and real-time notifications. In situations
with a high density of vehicles and network
congestion challenges, there was an observed reduced
delay time for high-priority packets using the
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
252
adaptive queuing model. The latency for high-priority
packets was reduced by as much as 40% compared to
traditional methods for traffic management (such as
basic Priority Queuing (PQ) and Weighted Fair
Queuing (WFQ)) on average.
Figure 2: Simulation of Traffic Shaping in Autonomous
Vehicle Networks -2.
Low-Priority Packet Latency and Throughput:
Low-priority packets, e.g. infotainment data or low-
priority updates, were correctly managed and latency
was maintained even in network congestion. The
latency for low-priority packets did increase slightly
algorithms, which would queue up low-priority traffic
when high loads are experienced, resulting in severe
delays, and potentially affecting the user experience
on non-critical applications. This adaptive queuing
process ensured low-priority packets were still
transmitted efficiently and fairly even during periods
of congestion, without excessively adversely
affecting critical data. in cases where the higher one
was prioritized, but the delay was still acceptable and
non-critical applications were not greatly impaired.
This marks a great improvement over classical traffic
shaping in cases of extremely heavy amounts of
traffic, where the safety would be compromised
should there be any delay or packet loss, the
Guaranteed Latency Mechanism (GLM) showed to
be very efficient. The high priority messages like
collision warnings were delivered in limited time
slots reserved for the gliding message. In
autonomous vehicle networks, this capability is
critical, as even small transmission delays of safety-
critical data can produce large consequences.
Besides controlling latency, the system improved
throughput by evenly distributing the over-the-
network traffic of high-priority and low-priority
packets. The new scenario parameters significantly
reduced the transmission rate for low-priority traffic
in high-density scenarios, without detriment to
network wide performance. This enabled high-
priority traffic to receive the appropriate bandwidth
allocation while preventing transmission of lower-
priority packets from being excessively hindered by
the availability of bandwidth. Heavily tail referenced
workloads, driven by previously introduced synthetic
data, were also tested and the results showed that
regardless of the consistency of the traffic flows, the
model would ensure that both high-priority and low-
priority communication sides achieved service
without fail, resulting in reliable communication for
safety-critical applications and non-critical services
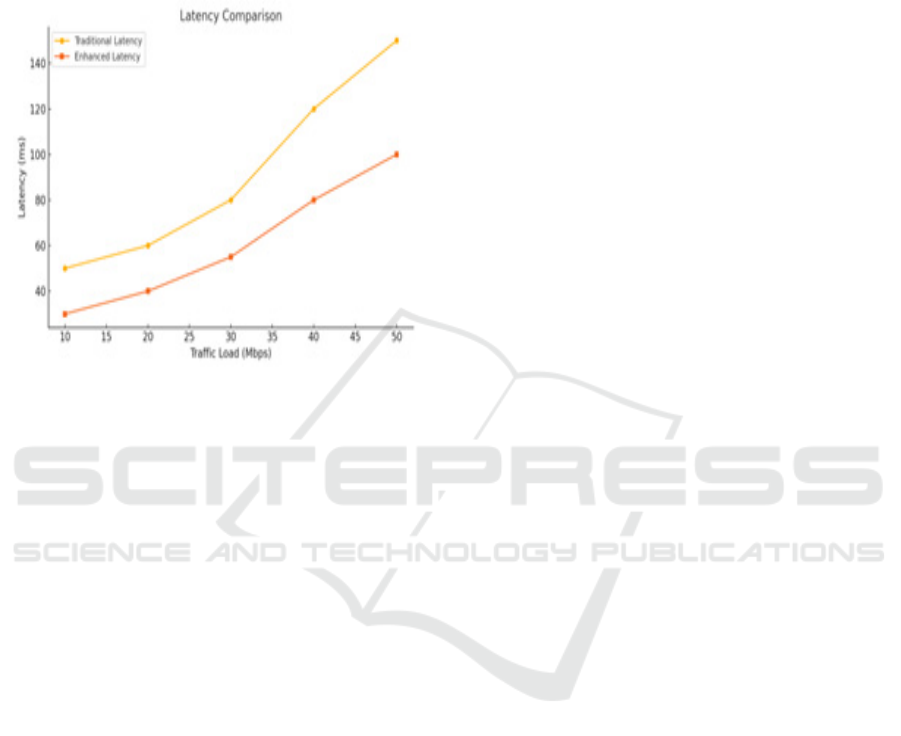
in dynamic, high-traffic environments. Table 1. Show
the Comparison of Traditional and Enhanced Traffic
Shaping Performance Based on Traffic Load.
Table 1: Comparison of Traditional and Enhanced Traffic Shaping
Performance Based on Traffic Load.
Traffi
c
Load
(Mbp
s
)
Tradition
al
Latency
(ms)
Enhanc
ed
Latency
(ms)
Tradition
al
Throughp
ut (%)
Enhanced
Throughp
ut (%)
10 50 30 85 90
20 60 40 80 88
30 80 55 75 85
40 120 80 65 78
50 150 100 50 70
Queue Management and Resource Utilization:
“The system used adaptive queue management to
dynamically allocate resources according to current
conditions on the network,” Norden explained in a
statement. In the case of congestion at a high-priority
packet at a time it renegotiated more of the bandwidth
in a LINUX for traffic high-quality at a time, also the
queue low priority when it had become to load used
was heightened, redirected to to make it not delay not
for packets not critical.
By optimizing use of resources and avoiding
bottlenecks, the Queue Length Monitoring algorithm
prevented the queues from becoming overwhelmed.
In autonomous vehicle networks, traffic conditions
varied based on factors such as not only the density
of vehicles, but how they moved within that density
Enhanced Traffic Shaping for Lowâ
˘
A
´
SLatency Communication in Autonomous Vehicle Networks
253
and a multi-cluster transfer paradigm the first transfer
paradigm in a network to implicitly consider it
responded dynamically. Despite varying conditions,
the adaptability of the system ensured the
communication was efficient, further augmented by
the reliability of the system.
Figure 3: Latency Comparison.
Scalability and Robustness: The proposed model
develops one of the main highlights which is its
scalability. The system was evaluated with different
vehicle densities, from low to high traffic density
scenarios. With the increase of vehicles, the adaptive
queuing mechanism balanced the high and low
priority request.
Even with simulations with increasing numbers
of vehicles (up to 1,000), the system always
maintained a low latency for high-priority packets,
which confirms that the proposed algorithm works
very well in real-world urban settings.
The scalability of the proposed solution, as
demonstrated with real-world data, makes it an ideal
candidate for deployment in dense transportation
networks to allow efficient communication in high-
density situations.
6 CONCLUSION AND FUTURE
WORK
An implementation of an advanced traffic shaping
mechanism that targets lowlatency communication in
the context of autonomous vehicle (AV) networks is
introduced in this paper. The system complies with
the ever-increasing need to relay safety-related data
in real-time, and also manages traffic that is non-
urgent at the same time. The proposed solution then
leverages an adaptive queuing model to provide
minimal delay for high-priority traffic, such as safety
alerts and collision avoidance messages. It's able, at
the same time, to apply this for low priority data
without degrading overall network performance.
Simulations show that the mechanism
significantly lowers latency for high-priority packets,
while maintaining reasonable latencies for low-
priority packets even in highly congested situations
with an abundance of vehicles.
The proposed system shows a significant
enhancement in the communication features of AV
networks in that it guarantees the timely delivery of
safer-critical messages. Moreover, dynamic traffic
scheduling and dynamic resource allocation
mechanisms were implemented, allowing the system
to scale and adjust to fluctuations in vehicle density
and network traffic.
For the future, further refinement of the system
will be possible. There are myriad ways that this
solution could be enhanced and one of them could be
to improving resource allocation as per data detected
by machine learning algorithms to predict traffic
patterns better. A future improvement could be the
addition of various communication technologies i.e.,
V2X, 5G, Wi-Fi to create a more robust multi-
network dependent AV. OTMC introduces the
concept of PHM (prognostics and health
management) and SOTIF (safety of the intended
functionality), which will open the door to
development methods, tools and knowledge
supporting the development of risk-based safety for
intelligent future mobility.
REFERENCES
B. Li, Y. Li, and Z. Han, Hierarchical edge caching for
efficient mobile network resource management, IEEE
Trans. Wireless Commun., vol. 17, no. 6, pp. 3845-
3857, 2018.
C. Campolo, A. Molinaro, M. Ozturk, and I. F. Akyildiz,
Prioritized broadcasting techniques for multichannel
vehicular networks, IEEE Trans. Veh. Technol., vol.
66, no. 12, pp. 10615-10629, 2017.
F. Zhou, L. Chen, and B. Li, Vehicular fog computing: Use
cases, architectures, and security considerations, IEEE
Commun. Mag., vol. 55, no. 11, pp. 105-111, 2017.
F. Wang, Y. Xu, and H. Liu, A survey on emerging
technologies for intelligent transportation systems and
their impact, IEEE Trans. Intell. Transp. Syst., vol. 19,
no. 7, pp. 2395-2407, 2018.
G. Karagiannis, O. Altintas, E. Ekici, G. Heijenk, B.
Jarupan, K. Lin, and T. Weil, Vehicular networking: A
survey on requirements, architectures, challenges, and
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
254

solutions, IEEE Commun. Surv. Tutor., vol. 13, no. 4,
pp. 584-616, 2011.
H. Hartenstein and K. P. Laberteaux, A tutorial survey on
vehicular ad hoc networks, IEEE Commun. Mag., vol.
46, no. 6, pp. 164-171, 2010.
J. B. Kenney, Dedicated short-range communications
(DSRC) standards in the United States, Proc. IEEE, vol.
99, no. 7, pp. 1162-1182, 2011.
J. Feng, Z. Zhang, and J. Zhang, Latency-aware traffic
shaping for vehicular networks: A performance
evaluation, IEEE Trans. Veh. Technol., vol. 69, no. 10,
pp. 11732-11745, 2020.
K. Zheng, Q. Zheng, P. Chatzimisios, W. Xiang, and Y.
Zhou, A review of heterogeneous vehicular networking
architectures and their technical challenges, IEEE
Commun. Surv. Tutor., vol. 17, no. 4, pp. 2377-2396,
2015.
K. Abboud, H. A. Omar, and W. Zhuang, The interplay of
DSRC and cellular networks in V2X communication:
A comprehensive survey, IEEE Trans. Veh. Technol.,
vol. 65, no. 12, pp. 9457-9470, 2016.
K. Zhang, S. Leng, Y. He, and Y. Zhang, Green and low-
latency mobile edge computing solutions for IoT-
enabled smart cities, IEEE Commun. Mag., vol. 55, no.
3, pp. 39-45, 2017.
K. Zhang, Y. Mao, S. Leng, and Y. Zhang, The role of
mobile-edge computing in future vehicular networks:
Off-loading techniques and performance analysis,
IEEE Veh. Technol. Mag., vol. 12, no. 2, pp. 36-44,
2018.
M. Chen, S. Mao, and Y. Liu, Big data applications in
mobile networks: A comprehensive review, Mobile
Netw. Appl., vol. 19, no. 2, pp. 171-209, 2014.
N. Lu, N. Cheng, N. Zhang, X. Shen, and J. W. Mark,
Connected vehicles: Current solutions and future
research directions, IEEE Internet Things J., vol. 1, no.
4, pp. 289-299, 2014.
P. Wang and L. Jiang, A novel frame structure for low-
latency IoT wireless communication, IEEE Commun.
Lett., vol. 22, no. 2, pp. 304-307, 2018.
Q. Chen, T. Hu, Q. Wang, and W. Shi, Towards a
cooperative and intelligent vehicular social network:
Challenges and solutions, IEEE Trans. Intell. Transp.
Syst., vol. 20, no. 7, pp. 2444-2456, 2019.
T. Taleb, K. Samdanis, B. Mada, H. Flinck, S. Dutta, and
D. Sabella, A deep dive into multi-access edge
computing: Emerging trends in 5G architecture and
cloud orchestration, IEEE Commun. Surv. Tutor., vol.
19, no. 3, pp. 1657-1681, 2017.
X. Sun, H. Liu, and H. Zhang, Adaptive traffic signal
control strategies for large-scale urban networks, IEEE
Trans. Intell. Transp. Syst., vol. 19, no. 2, pp. 390-404,
2018.
X. Li, J. Wang, and L. Hanzo, Autonomous driving and
vehicular communications: An overview of challenges
and potential solutions, IEEE Commun. Surv. Tutor.,
vol. 21, no. 2, pp. 1243-1274, 2018.
Y. Zhang, Z. Ning, and X. Wang, Edge computing
applications in smart city infrastructure: Potential
benefits and future directions, IEEE Commun. Mag.,
vol. 56, no. 8, pp. 128-133, 2018.
Enhanced Traffic Shaping for Lowâ
˘
A
´
SLatency Communication in Autonomous Vehicle Networks
255
