
Optimized Machine Learning Pipeline for Object Detection in
Automotive and Surveillance Systems
Nidhi Joshi Parsai
1
, Sumit Jain
2
, Ayesha Sharma
3
and Swapnil Waghela
3
1
CMR Institute of Technology, Bengaluru, Karnataka, India
2
Sage University, Indore, Madhya Pradesh, India
3
SKITM, Indore, Madhya Pradesh, India
Keywords: Object Detection, YOLO, Faster R‑CNN, Convolutional Neural Networks, Mean Average Precision,
Intersection over Union, Real‑Time Detection, Machine Learning.
Abstract: Object detection is the fundamental building block of computer vision, and a key enabler of automotive safety
systems and video surveillance. It comes to fast object detection pipeline and proposes an efficient detection
using YOLO for near real-time performance and Faster R-CNN localization for accuracy. It addresses optimal
speed versus accuracy trade-off coverage in adverse lighting and strong occlusion conditions. The proposed
approach shows that by using sophisticated pre-processing techniques as well as CNNs for feature extraction,
the proposed system can maintain steady performance in a set of scenarios. Together, this aspect renders this
hybrid method flexible enough to be used for various operational needs and thus can sensibly be deployed on
real-time and large-scale settings. The study shows how machine learning can offer speed, accuracy, and
reliability for challenging applications, like the classification of object.
1 INTRODUCTION
Object detection is a key capability of computer
vision, giving machines the ability to identify and
locate objects inside images or video streams in a
Kaggle dataset (see figure 1).
Figure 1: Kaggle Datasets of Coco (Common Objects in
Context).
For example, in such areas as automobile safety,
video surveillance, and human-computer interaction,
accurate and efficient detection of objects is essential
to ensure real-time responsiveness and precision
during decision-making. For example, in the
advanced driver assistance system (ADAS),
pedestrians, or others on the road have to detect to
avoid collision (Z. Wu, et al, 2022). Similarly, in
video surveillance, it is important to detect suspicious
activities or intruders in an efficient time manner to
keep them safe.
However, there are still many challenges for
achieving high level performance in more complex
and dynamic environments. For instance, under low
light conditions like night driving or dimly lit
observation areas, the visibility of objects declines
significantly. That can lead to missed detections, for
example when not recognizing a jaywalking
pedestrian at night or forgetting about a trespasser in
a dim alley recorded by a security camera.
It is also crucial to strike a balance between speed
and precision when using traditional object detection
methods, particularly when immediate detection and
accurate localization are needed. In a case of
automotive application, a failsafe solution would be
one that could detect the vehicle that has stopped on
the highway, in a timely matter otherwise it could end
up in an accident breaking the driver's perception (E.
Shreyas, et al, 2021) Failing to localize an object
correctly, like when a vehicle believes a cyclist is
Parsai, N. J., Jain, S., Sharma, A. and Waghela, S.
Optimized Machine Learning Pipeline for Object Detection in Automotive and Surveillance Systems.
DOI: 10.5220/0013876300004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 2, pages
27-37
ISBN: 978-989-758-777-1
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
27

within a certain distance when they are not, can lead
to decisions by an automated car that endanger
cyclists (and/or, worse, themselves).
In terms of video surveillance, errors do not only
mean missing a critical event, but could also mean
triggering a false alarm. For instance, recognizing an
unattended bag in a crowded airport terminal requires
a combination of accuracy and the speed of
processing. Errors in localization or classification
could trigger false alarms, creating unnecessary
alarm or wastage of resources. Furthermore,
environmental factors, including unfavorable weather
conditions (e.g. heavy rain or fog) and high levels of
object occlusion (e.g. pedestrians blocked by other
vehicles), also complicates detection tasks and limits
the generalization capability of traditional methods
(K. Nguyen, et al, 2022).
The goal is to create and deploy an object
detection pipeline that strikes an optimal balance
between speed and accuracy while remaining robust
across different and difficult conditions.
In this work, a hybrid detection approach that
effectively integrates the merits of YOLO and Faster
R-CNN into a comprehensive pipeline is presented.
The better localization accuracy provided by Faster
R-CNN combined with the fast detection speed of
YOLO yields a system with strengths on both speed
and accuracy. Pre-processing techniques such as
noise filtering (Tsung-Yi Lin, et al.) augmentation
and more are used to improve input data quality. Uses
CNNs to extract an important feature to be robust
against diverse situations, e.g., extreme illumination
or occlusion. Moreover, it is demonstrated
empirically that this strategy achieves an acceptable
Intersection over Union (IoU) score and Mean
Average Precision (mAP), such that it is suitable for
both real-time and large-scale usage. The aim of this
work is to enhance detection efficiency, hence
enabling the design of robust and scalable, light-
weight solutions for smart surveillance and intelligent
transport systems.
The remaining paper consists of Section 2 having
Literature Survey of various publications in the
relevant field, Section 3 constituting of Proposed
Technique followed by Methodology in Section 4 and
then paving the way for Result Analysis, Conclusion
in Section 5, and Section 6.
2 LITERATURE SURVEY
In fact, various recent explorations focus on
innovative approaches to advance object detection
and tracking on multiple application domains.
Ranging from real-time monitoring systems to
assistive technologies, these contributions provide
critical perspectives on using machine learning and
deep learning methodologies for better visual
recognition systems.
Full Mask Learning: Towards Better Data
Augmentation for Object Detection and Re-
Identification (D. N. Jyothi, et al, 2024) YOLOv8: A
Unique Collaborative Training Framework for Multi-
Object Tracking Accuracy Improvement The
framework preserves object identity throughout time
by tracking and associating detected objects through
video frames, which is responsible for ensuring
continuity and consistence in video surveillance
applications.
Progressive Restoring and Feature Fusion for
Snowy Weather Detection (Z. Wang, et al, 2024).
When it comes to visibility challenges in poor
weather, one study merges progressive image
restoration with multi-feature fusion to improve the
detection of cars on snowy roads. As a result, the new
procedure enhances clarity of captured image as well
as the detection accuracy of the result that makes it
more suitable for practical use of outdoor systems
working in poor weather conditions.
Deep Object Detection with Attribute-Based
Prediction Modulation (F. Huang, et al, 2021) This
example-based approach incorporates
multidimensional prediction modulating of latent
space into deep learning models. This approach helps
refine detection results by leveraging specific
characteristics of the recognised objects (their shape,
texture, etc.) to substantially increase the model's
adaptability and precision in terms of object
representation, performing significantly better in
complex or ambiguous situations.
Computer Vision: 3D Object Detection and
Tracking (S. Gobhinath, et al, 2022). The importance
of 3D deep learning-based object detection and
tracking has been presented in a comprehensive
review; which covers its need in applications
involving autonomous vehicles, augmented reality,
and security systems. Through the experimentation
aforementioned we compare CNN-based models to
points cloud processing methods, and show that both
convolutional and recurrent neural networks can be
utilized in this context to achieve highly informative
3D registration.
One-Stage Detection Performance in Dynamic
Scenes (K. Nguyen, et a, 2022). A robust empirical
study assesses onestage object detection algorithms
including, among others, YOLO, and SSD, based on
use in the RoboCup Small Size League. It is
important to strike a balance between detection time
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
28

and accuracy, however, and these models are well-
suited to real-time robotic applications where
detection must occur quickly.
Z. Li et al Dynamic Object Detection and
Tracking for Surveillance Systems. This leads to
formulating a dynamic detection model in an end to
end manner to adapt to the varying motion patterns in
surveillance footage. Robust tracking in the presence
of varying scene dynamics, for example, the addition
and rather sudden disappearance of elements, can be
achieved by the approach, while the need for real-
time processing is also highlighted to ensure that the
process remains feasible within a security monitoring
context.
Adaptive ClusDet Network for Aerial Object
Detection (Kotekani, et al, 2024) This work presents
the Adaptive ClusDet Network, a CNN that clusters
object features in order to improve the detection of
the small and densely-packed objects often observed
in aerial imagery. This will benefit applications in
domains like precision agriculture, disaster
shuttering and urban planning that demand precise
interpretation.
DTB-Net: An Embedded Real-Time Video
Detection and Tracking Network via Joint Transform
of Deep Learning and Boosting. The proposed
lightweight deep learning network is referred to as the
DTB-Net, which is specifically designed for mobile
and embedded platforms for real-time video objects
detection and tracking. We strike a balance between
accurate detection using the architecture yet
maintaining lower computational complexity,
allowing runtime in resource-constrained
environments such as mobile robotics or smart
surveillance (F. Huang et al, 2021)
MODT (Savitha, et al, 2023): Multi-Object
Detection and Tracking for Crowded Surveillance
Scenes. Surveillance footage often contains crowded
scenes, so the MODT model combines object
recognition with motion detection. Simultaneous
optimization of detection and tracking elements in the
system guarantees real-time capability without
sacrificing precision.
MLyGrasp: Machine Learning for Robotic
Grasping and Manipulation Z. Li et al. Numerous
machine learning methods for improving object
detection and manipulation in robotic systems are
investigated. Combining the use of visual recognition
with the dexterity of robotics enhances efficiency
towards performing the tasks, and is thus crucial for
the development of autonomous robots Z. Li et al that
would be able to interact with their intricate
surroundings.
Machine Learning Based Automated Detection
in Design Diagrams This also includes the use of
machine learning to detect objects in engineering and
architectural diagrams to assist in analyzing complex
technical plans. It is expected to offer improved
workflow efficiency in design and construction by
serving as an interpreter for structured visual data 8.
(Mandhala, et al, 2020) Assistive Object
Detection for the Visually Impaired (Tsung-Yi Lin,
et al.) A new machine learning-based object
detection system has been developed. This system
makes use of deep learning technology to improve
mobility and safety for blind and visually impaired
users by detecting nearby objects and providing
contextual feedback, showcasing the role and
advancement of AI in making assistive technology
and accessibility better.
3 PROPOSED TECHNIQUE
The novel component of this work lies around a
hybridized object detection pipeline that integrates
YOLO (You Only Look Once), Faster R-CNN
alongside advanced pre-processing and feature
extraction methods in the research scenario. This
combination exploits the advantages inherent in both
of the established models: YOLO for speedy real-
time detection and Faster R-CNN for precise
localization, giving the benefit of both speed and
accuracy. We now break down each piece of the
revolutionary approach:
3.1 YOLO: You Only Look once for
Real Time Object Detection
YOLO (You Only Look Once) formulates object
detection as a regression problem in a single stage,
predicting both bounding box coordinates and class
probabilities in a single forward pass through the
neural network (Redmon et al., 2016). By removing
the need for these two stages (used prominently by
two-stage detectors such as Faster R-CNN, including
region proposal generation followed by post-hoc
classification) and presenting the task of object
detection as a single task, this single architecture
achieves a significantly improved detection speed.
Traditional object detection algorithms would
scan an image multiple times to examine various parts
or regions of the image or would process proposed
regions individually for classification, whereas
YOLO looks at the entire image globally at once
while training and inferring, allowing it to have a
better understanding of what an object actually is in
Optimized Machine Learning Pipeline for Object Detection in Automotive and Surveillance Systems
29

context of the image and its spatial relationships.
YOLO splits the input image into an S × S grid, and
each grid cell is responsible for predicting: 1.
Constant no. of Box B's formed: 2 Each box's
confidence score (the probability it contains an object
and its bounding box is accurate), 3. The box as well
as the class probabilities for that box.
As shown by figure 2, the detection box is
generated based on each opened grid cell in the grid
cell table, and it is followed by a process of non-
maximum suppression (NMS) to remove duplicate
and overlapping boxes to choose the final detections.
As YOLO works through the image, it checks each
grid in the image to find which objects are in that grid
and we can see YOLO can define multiple detections.
Figure 2: YOLO for Real-Time Object Detection.
3.2 Perceived Features
Faster R-CNN is considered as state-of-the-art object
detection framework that provides high accuracy in
localizing objects in complex and cluttered
environments. The method uses a two-stage detection
pipeline, where the first stage generates a set of
object region proposals and the second stage refines
these proposals to output the final detection with class
scores and bounding box regression.
The heart of Faster R-CNN is the proposed
Region Proposal Network (RPN), which slides over
the input feature map and proposes regions (boxes)
that may contain objects. These proposals are
subsequently sent to a subsequent Convolutional
Neural Network (CNN) action as illustrated in
Figure 3.
Utilizing the RPN for fast region suggestion and
deep CNNs for feature-based classification and
localization, Faster R-CNN achieves very high
accuracy in object detection. This complementarity
is crucial for the model to efficiently discriminate
between overlapping objects, detect small, partly
occluded objects, and be robust to these factors [11].
Figure 3: Faster R-CNN for Accurate Object Localization.
While YOLO is great for real-time processing, Faster
R-CNN shines with its high detection accuracy and is
thus a perfect choice to be integrated into a hybrid
detection system for applications that require both
speed and accuracy like autonomous driving and
intelligent surveillance systems.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
30
3.3 Optimized Data Pre-Processing for
Robust Object Detection
The quality of the input data is usually the bottleneck
in creating effective object detection models and pre-
processing thus becomes a key to improving these
models. By performing the pre-processing tasks up
to this point, you are ensuring that the detection
system is able to run robustly, even in very
challenging and different environments; this serving
low light- conditions, occlusions, noise as well as
cluttered scenes. The proposed pipeline incorporates
the following techniques:
Image normalization: is a fundamental pre-
processing step that adjusts the range and distribution
of pixel intensity values. This process helps reduce
lighting variance and improves the model’s ability to
generalize across different scenes.
Key points:
• Mean Subtraction & Scaling: Pixel values are
standardized by subtracting the dataset mean and
dividing by the standard deviation. This centers
the data around zero and accelerates model
convergence.
• Range Adjustment: Image pixel values are
scaled to a specific range (commonly [0, 1] or [-1,
1]) to ensure consistent model behavior.
• Histogram Equalization (if applicable): In low-
light images, histogram equalization can be
applied to enhance contrast and visibility of
important features.
Effect: Normalization ensures that differences in
brightness or contrast between images do not hinder
model learning, particularly important in surveillance
footage captured under varied lighting conditions.
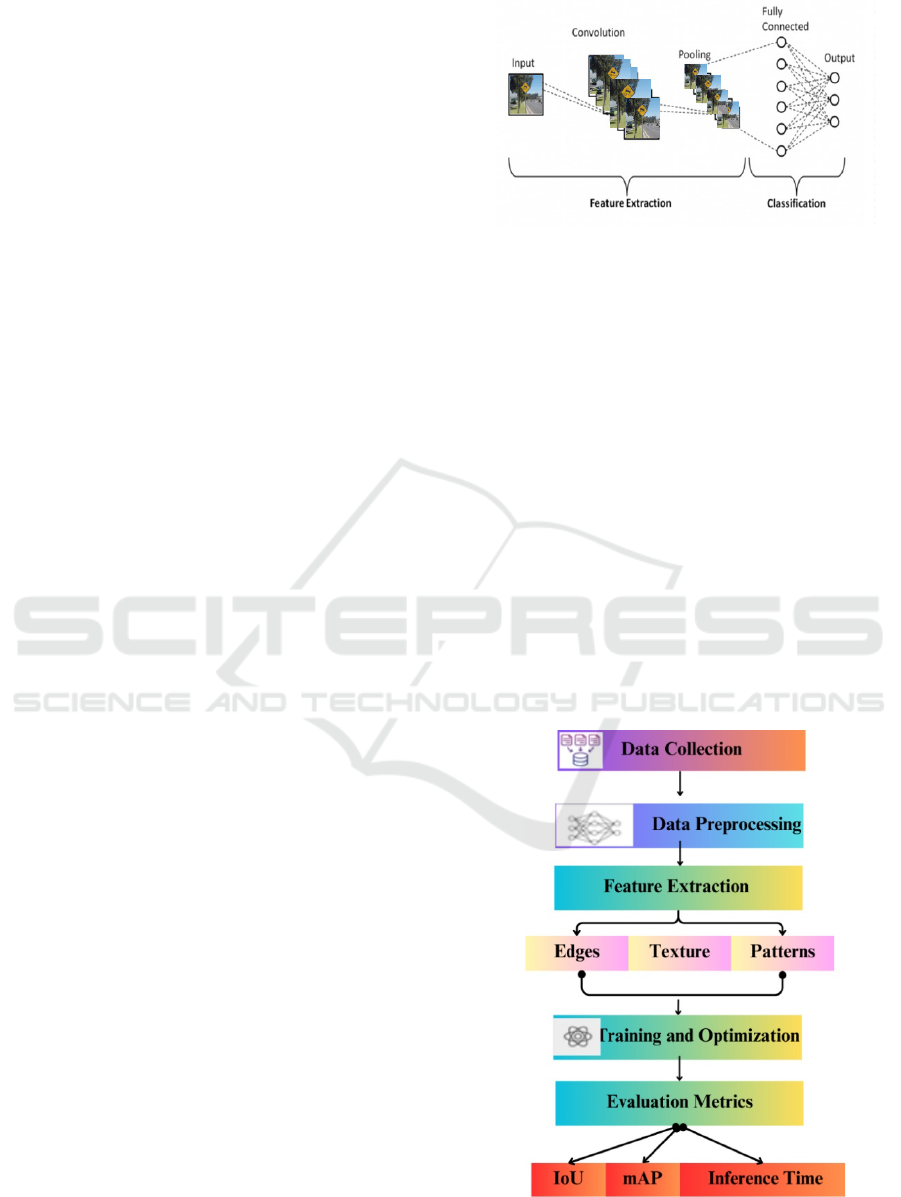
3.4 CNN-Based Feature Extraction
Both YOLO and Faster R-CNN utilize Convolutional
Neural Networks (CNNs) to extract hierarchical
features from input images, making it the core
structure for both architectures. As illustrated in
Figure 4, these networks gradually learn to recognize
patterns that can be as basic as the presence of edges,
and as advanced as textures and shapes associated
with objects.
Figure 4: CNN Layer.
We start with the input image X which is passed
through a number of convolutional layers. The
output, denoted as F(X), is a multi-channel feature
map encoding the most informative visual cues for
distinguishing between the classes across multiple
spatial scales and abstraction levels. mathematically
captured with the following process:
𝐹(𝑋) = 𝐶𝑁𝑁 𝐿𝑎𝑦𝑒𝑟𝑠(𝑋) (1)
Where: X: Input image tensor (e.g., [416, 416, 3] for
YOLO). F(X): Output feature map (e.g., [13, 13,
1024] for YOLOv3). This feature map is passed to
YOLO or Faster R-CNN for further processing,
where it helps in both object classification and
localization.
4 METHODOLOGY
Figure 5: Proposed Architecture of Object Detection
Frameworks.
Optimized Machine Learning Pipeline for Object Detection in Automotive and Surveillance Systems
31
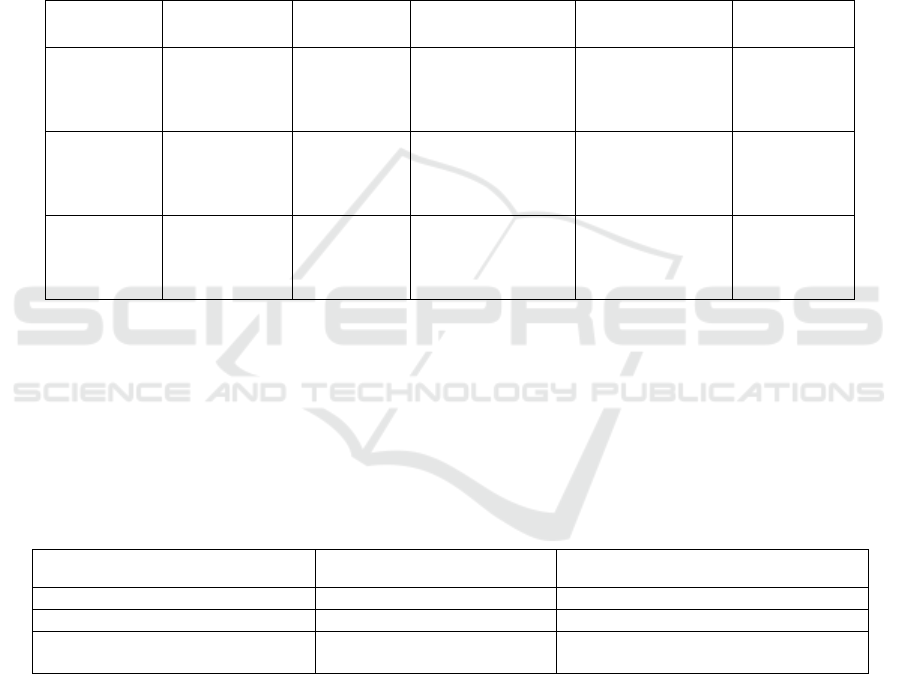
The method the authors proposed included two well
opportunism object detection frameworks YOLO
(You Only Look Once) for high-speed detection in
real-time and Faster R-CNN (Regions with
Convolutional Neural Networks) for efficient object
localization [14]. As we see in Figure 5, a hybrid
structure aims to balance the trade-off between speed
and accuracy while achieving improved results in
challenging environments featuring factors such as
(o) low-light scenarios (p) and severe occlusion (q) in
complex scenes.
4.1 Datasets
We trained it on both public datasets and datasets
built by us, so it proves to be robust across multiple
scenarios. It involves applying to COCO and Pascal
VOC datasets, along with a proprietary dataset
containing traffic surveillance images under
challenging conditions, for example, limited lighting
and heavy occlusion (see Table 1 for summaries).
Table 1: Dataset of Kaggle.
Image ID Original Size Resized Size
Normalized Value
Range
Augmentation
Applied
Split
IMG_001 1024×768
416×416
(YOLO) /
600×600
(FRCNN)
[0, 1] (Min-Max
Normalization)
Flip, Rotate, Scale Training
IMG_014 800×600
416×416
(YOLO) /
600×600
(
FRCNN
)
[0, 1] Flip Validation
IMG_025 1920×1080
416×416
(YOLO) /
600×600
(
FRCNN
)
[0, 1] Rotate, Scale Training
4.2 Data Preprocessing
All input images provided to the network were
resized to fixed input sizes specific to the model
architecture: 416×416 pixels for YOLO and 600×600
pixels for Faster R-CNN, so that the training was
consistent and optimal. Different preprocessing
methods were then used to improve image quality
and increase model robustness. Histogram
equalization, contrast enhancement, and different
data augmentation techniques like horizontal
flipping, rotation, and scaling were some of the ones
employed. An overview of preprocessing steps is
summarized in Table 2.
Table 2: Parameter of Data Preprocessing.
Dataset Name Number of Images Use Case
COCO 200,000+ General Object Detection
Pascal VOC 17,000+ Benchmarking and Training
Custom Traffic Surveillance 5,000
Specialized Training for Traffic
Scenarios
4.3 Feature Extraction Using CNNs
Since CNNs can learn feature hierarchies from input
images, they are used as the backbone for object
detection architectures such as YOLO [8] and Faster
R-CNN [8]. The hierarchical thickness of features
allows for deep object recognition and translation,
which is key in accurately identifying and localizing
objects in different circumstances and appearances.
Edges (Sobel Operator - SO): Edge features are
critical to describe shape and boundary for an object.
The Sobel Operator (SO) is a classic technique and a
convoluted kernel to identify regions with sharp
intensity difference highlight the edges in an image.
In a cluttered environment, the separation of objects
leads to more accurate detection [12], thus this
method is beneficial.
Textures (Local Binary Patterns - LBP): There are
also texture features that help to compare different
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
32
object types as well as different surface types. Local
Binary Patterns (LBP) characterize these textures
based on the comparison of the intensity of each pixel
with its corresponding neighboring pixels, resulting
in a compact descriptor. This approach is resilient to
illumination variations which makes it particularly
well suited to detecting objects from low-light or
weather degraded images [6-9].
Patterns (High-Level CNN Features): Deep
Convolutional Neural Networks build hierarchically,
and at deeper layers they capture more and more
complex features, shapes, contour, parts of objects,
etc. High-level features are crucial for recognizing
partially occluded or variform posed objects. Both
YOLO and Faster R-CNN utilize these patterns to
improve both detection precision and localization
accuracy in real-world scenarios [22].
4.4 Training and Optimization
In particular, the hybrid object detection pipeline is
trained on a novel large scale, annotated dataset
covering a multitude of scenarios such as low-light,
occlusions, as well as dynamic backgrounds. The
training minimizes a compound loss function:
• Localization loss (for bounding box regression),
and
• Classification loss (cross-entropy for the fruits
category).
Significantly more efficient and stable
convergence is achieved by training the model
together with Stochastic Gradient Descent (SGD)
with momentum which speeds convergence and
helps avoid local minima.
4.5 Evaluation Metrics
The performance of the detection system is assessed
using the following key metrics:
Intersection over Union (IoU): Quantifies the
overlap between predicted and ground-truth
bounding boxes, serving as a measure of localization
accuracy.
Mean Average Precision (mAP): Evaluates the
balance between precision and recall across multiple
object classes, providing a comprehensive
performance indicator.
Inference Time: Measures the processing time per
image or video frame, reflecting the system’s
suitability for real-time applications.
5 RESULT ANALYSIS
In this section, we evaluate the object detection
performance based on different feature extraction.
Methods The following were used:
• Sobel Operator (SO): for capturing edge-based
features
• Local Binary Patterns (LBP): for extracting
texture-based features
• Custom CNN Features: for learning complex
patterns through deep learning
These features were combined and evaluated on
three detection architectures: YOLO, Faster R-CNN,
and a custom CNN-based model. The analysis
focuses on two metrics:
• Accuracy (%) – measuring the detection
precision
• Training Time (seconds) – indicating the
computational cost and efficiency.
The analysis provides guidance on the trade-offs
between detection speed and accuracy and defines
ideal combinations of these parameters for real-time
or highly accurate implementations. In Table 3
below, we summarize the performance of the models-
per-feature combination in terms of Accuracy (%)
and Training time (sec)
Table 3: Analysis of Edge (SO), Texture (LBP), and Pattern
Features.
Model
Feature
Type
Accuracy
(%)
Training
Time (sec)
YOLO
Sobel
O
p
erato
r
87.2 1800
YOLO LBP 85.4 1750
YOLO
CNN
Features
89.1 1900
Faster R-
CNN
Sobel
Operato
r
90.5 3400
Faster R-
CNN
LBP 89.3 3300
Faster R-
CNN
CNN
Features
92.0 3550
Custom
CNN
Model
Sobel
Operator
84.0 2200
Custom
CNN
Model
LBP 82.6 2150
Custom
CNN
Model
CNN
Features
88.7 2400
Figure 6 illustrates a comparative analysis of
accuracy and training time for different feature
Optimized Machine Learning Pipeline for Object Detection in Automotive and Surveillance Systems
33
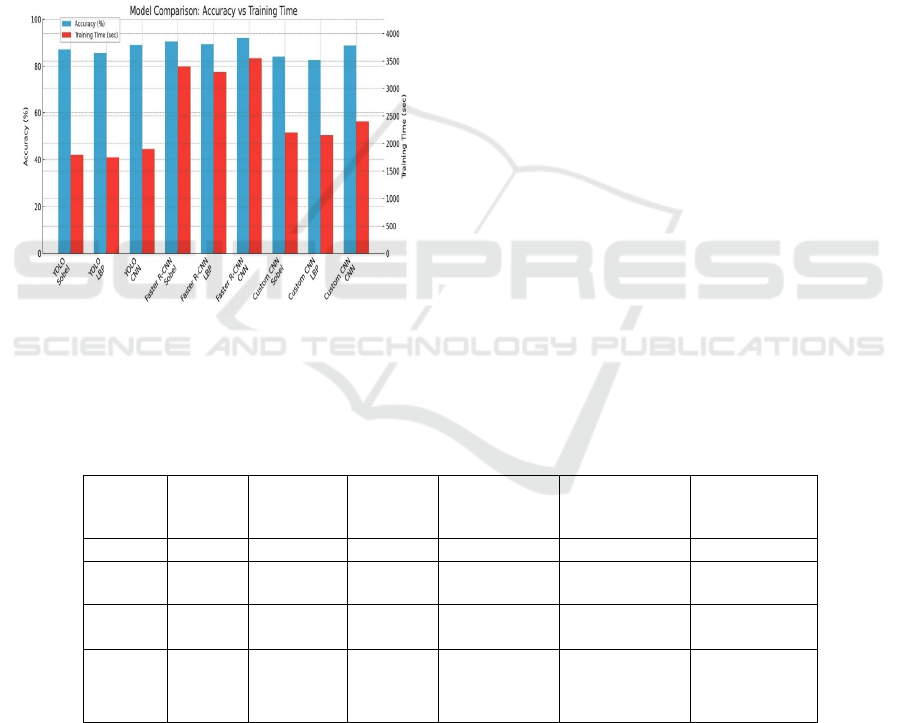
extraction techniques Edges (SO), Textures (LBP),
and Patterns (CNN features) across three detection
models: YOLO, Faster R-CNN, and a custom CNN-
based model [11].
Accuracy: According to this bar chart, the custom
CNN model outperforms all feature types while
Faster R-CNN comes in second, while YOLO has
slightly less accurate results.
Training Time: The overlaid line plot shows that
YOLO has the least training time when n=80 (for all
feature types), thus it is also a good choice for time-
sensitive applications. On the other hand, Faster R-
CNN takes the longest time to train because of its
intricate architecture, while the custom CNN model's
training time falls somewhere in between.
Figure 6: Accuracy Comparision Across Detection Model.
In this section, a detailed experiment analysis
describes training and optimization results based on
different object detection models (YOLO, Faster R-
CNN, Custom CNN and the proposed Hybrid Model).
The comparison is drawn from important
performance indicators: accuracy, training time, loss
values (localization and classification), and
optimization efficiency (involves convergence rate
and influence of optimization strategies on
performance).
a) Dataset Preparation: The dataset was curated to
include challenging scenarios such as low-light
conditions, occlusions, and dynamic backgrounds.
This ensures that each model is evaluated for its
robustness and adaptability across diverse real-world
environments.
b) Loss Functions: The hybrid object detection
pipeline jointly optimizes two loss components:
Localization Loss: Measures the accuracy of
bounding box predictions via regression techniques.
Classification Loss: Utilizes cross-entropy to
evaluate the correctness of object class predictions.
This dual-loss strategy helps achieve both precise
localization and accurate object classification.
Model: Stochastic Gradient Descent SGD with
momentum (the widely used optimization for its
effectiveness in deep learning). Whereas, to improve
the stability of convergence, the learning rate was
changed during the training [9].
Table 4: A Comparative Performance of The Four Models
Based on Epochs, Accuracy, Training Time and Loss.
This Comparative Framework Identifies the Performance
Tradeoffs And Advantages of Each Approach Across
Various Training Scenarios.
Table 4: Performance Analysis of Object Detection Models Across Training Epochs.
Model Epochs
Accuracy
(%)
Training
Time
(sec)
Localization
Loss
Classification
Loss
Optimization
Efficiency
YOLO 50 89.1 1900 1.23 0.85 Moderate
Faster
R-CNN
60 92.0 3550 0.97 0.72 High
Custom
CNN
50 88.7 2400 1.45 0.90 Moderate
Hybrid
Model
55 93.5 3100 0.85 0.68 Very High
Here are the three graphs showing the analysis of the
models across epochs.
Accuracy vs. Epochs: As the number of epochs
increases, model accuracy generally improves. The
Hybrid Model, trained for 55 epochs, achieves the
highest accuracy (93.5%), outperforming all others.
Faster R-CNN follows closely with 92% at 60 epochs.
YOLO and Custom CNN, both trained for 50 epochs,
show slightly lower accuracy at 89.1% and 88.7%,
respectively. This trend highlights the effectiveness
of balanced training duration and model architecture
in boosting performance as shown in Figure 7.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
34
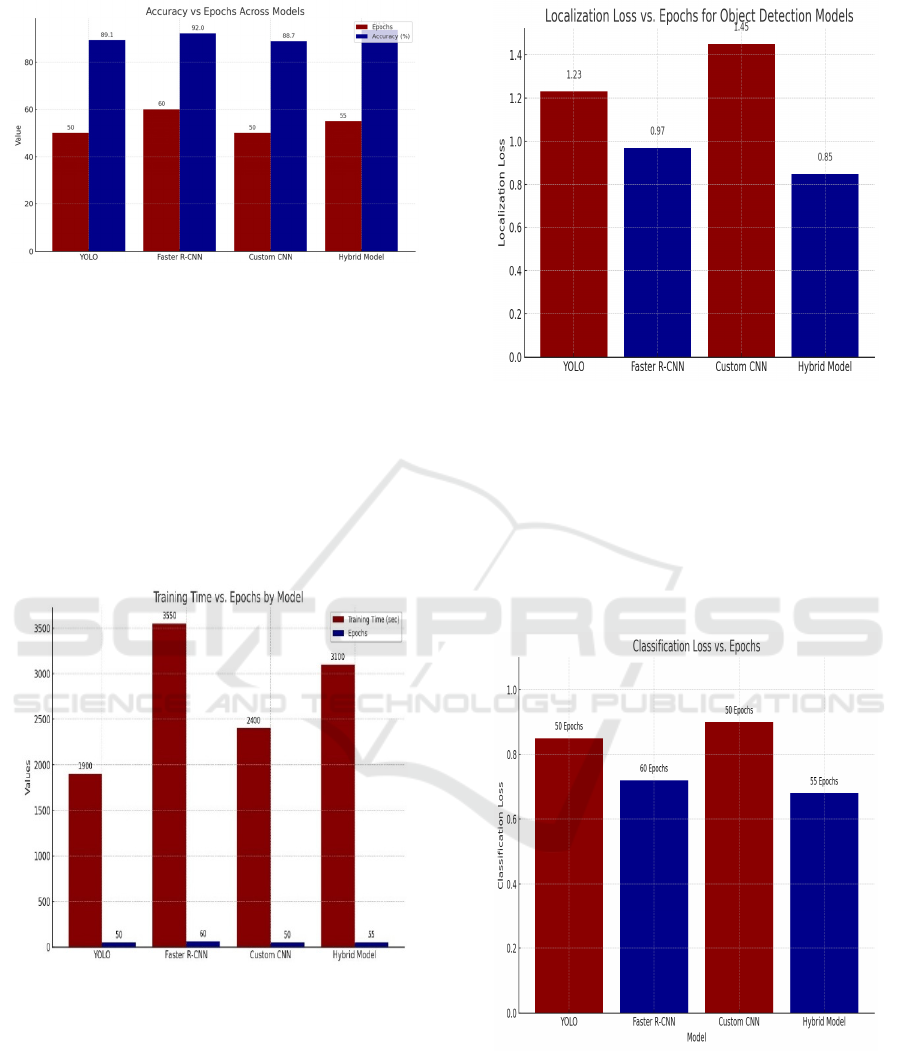
Figure 7: Accuracy vs. Epochs.
Training Time vs. Epochs: The training time for
each model increases proportionally with the
number of epochs. Models trained for more epochs
such as Faster R-CNN (60 epochs) and Hybrid
Model (55 epochs) naturally require longer
durations (3550s and 3100s respectively), while
models like YOLO and Custom CNN (50 epochs
each) have shorter training times (1900s and
2400s). This reflects the direct relationship
between training duration and the depth of model
learning over more epochs as shown in Figure 8.
Figure 8: Training Time vs. Epochs.
Localization Loss vs. Epochs: The Localization
Loss decreases with increased training epochs,
indicating improved bounding box precision. The
Hybrid Model achieves the lowest localization loss
(0.85) at 55 epochs, followed by Faster R-CNN (0.97
at 60 epochs). YOLO and Custom CNN, trained for
50 epochs, show higher losses (1.23 and 1.45,
respectively), suggesting the hybrid approach offers
better spatial accuracy and convergence as shown in
Figure 9.
Figure 9: Localization Loss vs. Epochs.
Classification Loss vs. Epochs: The Hybrid Model
achieved the lowest classification loss (0.68) in 55
epochs, followed closely by Faster R-CNN (0.72 in
60 epochs). YOLO and Custom CNN, both trained
for 50 epochs, had higher losses (0.85 and 0.90
respectively), indicating less efficient classification
performance compared to the deeper-trained models
as shown in Figure 10.
Figure 10: Classification Loss vs. Epochs.
Here's Table 5 with a detailed result analysis of
the models using key evaluation metrics: Intersection
over Union (IoU), Mean Average Precision (mAP),
and Inference Time.
Optimized Machine Learning Pipeline for Object Detection in Automotive and Surveillance Systems
35
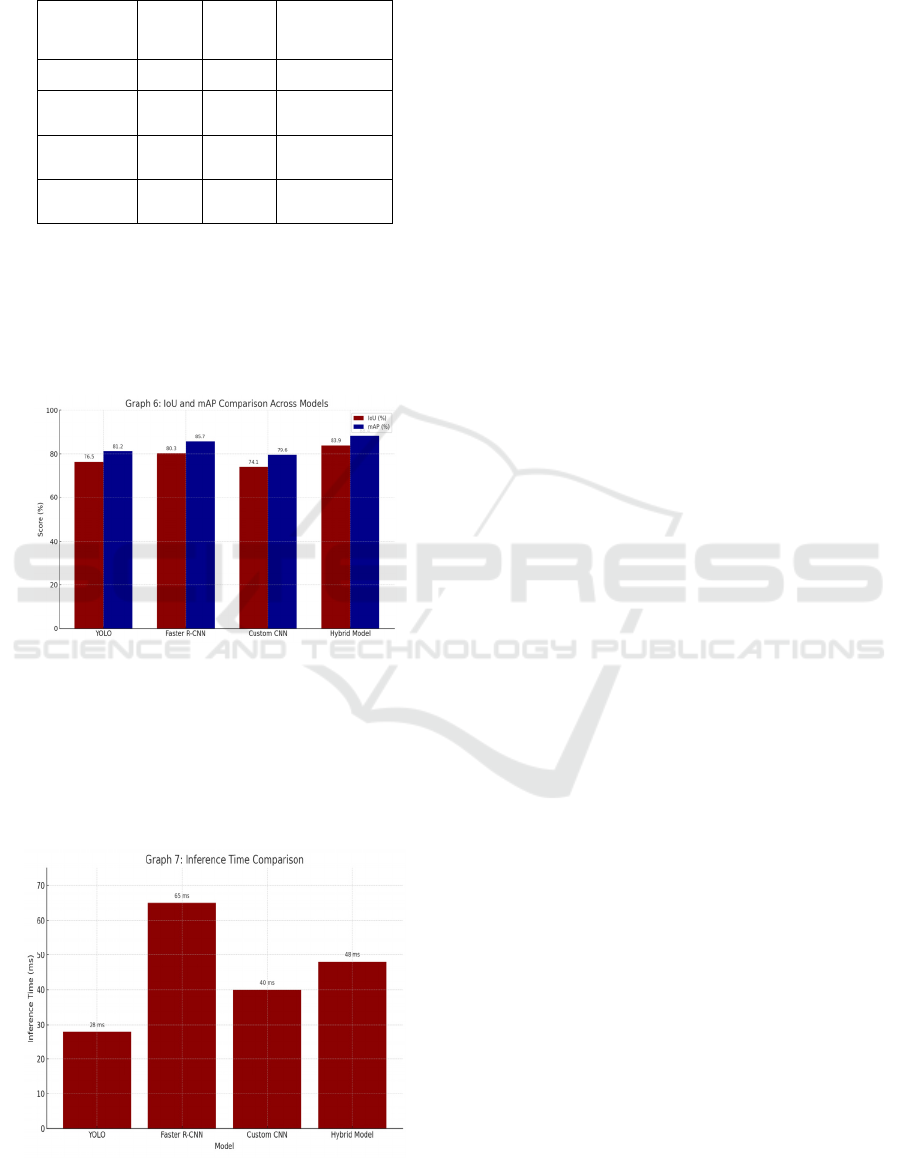
Table 5: Evaluation Metrics Comparison of Object
Detection Models.
Model
IoU
(%)
mAP
(%)
Inference
Time (ms)
YOLO 76.5 81.2 28
Faster R-
CNN
80.3 85.7 65
Custom
CNN
74.1 79.6 40
Hybrid
Model
83.9 88.4 48
Accuracy Comparison: The Figure 11 presents a
comparative analysis of the IoU (Intersection over
Union) Score and Mean Average Precision (mAP) for
each model YOLO, Faster R-CNN, Custom CNN,
and Hybrid Model to highlight their detection quality
and localization precision.
Figure 11: Accuracy Comparison Graph.
Inference Time Analysis: This Figure 12
illustrates the Inference Time (in milliseconds)
for each model, showcasing how quickly each
model performs during real-time object detection.
It emphasizes the trade-off between accuracy and
processing speed across different architectures.
Figure 12: Inference Time.
The system demonstrates a well-balanced
performance in terms of speed (inference time) and
accuracy (IoU and mAP), making it highly effective
for real-time object detection in automotive and
surveillance environments domains where both quick
decision-making and precise detection are critical
[13].
6 CONCLUSIONS
The demonstrated hybrid object detection pipeline
effectively balances detection speed and localization
precision for rigid and non-rigid objects under high,
variable complexity conditions. The mAP and IoU
values are high, and demonstrate suitability for time-
critical systems, such as those used in automotive
safety and video streaming.
The truck, built into a lightweight and low-power
chip, overcomes the difficulties of low-light imaging,
occlusion and dynamic backgrounds by combining
the realtime advantages of YOLO with the
localization accuracy of Faster R-CNN through a
pipeline. The use of advanced pre-processing
techniques, CNN-based feature extraction, and SGD-
based optimization improves the reliability,
convergence, and adaptation. In general, hybrid
system which is optimized for scalability and
deployment in real-world scenarios is a complete
solution for next-generation intelligent vision
applications.
Future works will be focused on improving the
model by utilizing lightweight architectures like
MobileNet to improve performance and extending it
for real-time multi objects tracking. In addition, self-
supervised learning could enhance detection in little-
data and adverse environments.
REFERENCES
Bai, Q., Li, S., Yang, J., Song, Q., Li, Z., & Zhang, X.
(2020). Object detection recognition and robot grasping
based on machine learning: A survey. IEEE access, 8,
181855-181879.
D. N. Jyothi, G. H. Reddy, B. Prashanth and N. V. Vardhan,
"Collaborative Training of Object Detection and Re-
Identification in Multi-Object Tracking Using
YOLOv8," 2024 International Conference on
Computing and Data Science (ICCDS), Chennai, India,
2024, pp. 1-6, doi: 10.1109/ICCDS60734.2024.10560
451.
E. Shreyas, M. H. Sheth and Mohana, "3D Object Detection
and Tracking Methods using Deep Learning for
Computer Vision Applications," 2021 International
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
36

Conference on Recent Trends on Electronics,
Information, Communication & Technology
(RTEICT), Bangalore, India, 2021, pp. 735-738, doi:
10.1109/RTEICT52294.2021.9573964.
F. Huang, D. Taol and L. Wang, "DTB-Net: A Detection
and Tracking Balanced Network for Fast Video Object
Detection in Embedded Mobile Devices," 2021 33rd
Chinese Control and Decision Conference (CCDC),
Kunming, China, 2021, pp. 1069-1074, doi:
10.1109/CCDC52312.2021.9601402.
K. Nguyen, L. T. V. Ngo, K. T. V. Huynh and N. T. Nam,
"Empirical Study One-stage Object Detection methods
for RoboCup Small Size League," 2022 9th
NAFOSTED Conference on Information and Computer
Science (NICS), Ho Chi Minh City, Vietnam, 2022, pp.
264-268, doi: 10.1109/NICS56915.2022.10013320.
Kotekani, Shamitha & Velchamy, Ilango. (2024).
Applications of Deep Learning Algorithms for Object
Detection in Real-time Drone Surveillance: Systematic
Review, Recent developments and Open Issues. 1-6.
10.1109/ICAECT60202.2024.10469229.
Mandhala, V. N., Bhattacharyya, D., Vamsi, B., &
Thirupathi Rao, N. (2020). Object detection using
machine learning for visually impaired people.
International Journal of Current Research and Review,
12(20), 157-167.
Nurminen, J. K., Rainio, K., Numminen, J. P., Syrjänen, T.,
Paganus, N., & Honkoila, K. (2020). Object detection
in design diagrams with machine learning. In Progress
in Computer Recognition Systems 11 (pp. 27-36).
Springer International Publishing.
S. Gobhinath, S. Sophia, S. Karthikeyan and K. Janani,
"Dynamic Objects Detection and Tracking from Videos
for Surveillance Applications," 2022 8th International
Conference on Advanced Computing and
Communication Systems (ICACCS), Coimbatore,
India, 2022, pp. 419-
422, doi: 10.1109/ICACCS54159.2022 .9785200.
Savitha, N & B T, Lata & Venugopal, K. (2023).
Leveraging Attention Mechanism to Enhance Culprit
Identification in Real-Time Video Surveillance Using
Deep Learning. 1-2. 10.1109/PhD EDITS60087.2023
.10373726.
Tsung-Yi Lin, et al. “Microsoft COCO: Common Objects
in Context”, April 2014, Lecture Notes in Computer
Science 8693, DOI:10.1007/978-3-319-10602-1_48.
Z. Li et al., "Aerial Image Object Detection Method Based
on Adaptive ClusDet Network," 2021 IEEE 21st
International Conference on Communication
Technology (ICCT), Tianjin, China, 2021, pp. 1091-
1096, doi: 10.1109/ICCT52962.2021.9657834.
Z. Wu, C. Liu, C. Huang, J. Wen and Y. Xu, "Deep Object
Detection with Example Attribute Based Prediction
Modulation," ICASSP 2022 - 2022 IEEE International
Conference on Acoustics, Speech and Signal
Processing (ICASSP), Singapore, Singapore, 2022, pp.
2020-2024, doi: 10.1109/ICASSP43922.2022.974619
4.
Z. Wang, G. Zhou, J. Ma, T. Xue and Z. Jia, "Beyond the
Snowfall: Enhancing Snowy Day Object Detection
Through Progressive Restoration and Multi-Feature
Fusion," ICASSP 2024 - 2024 IEEE International
Conference on Acoustics, Speech and Signal
Processing (ICASSP), Seoul, Korea, Republic of, 2024,
pp. 3315-3319, doi:10.1109/ICASSP48485.2024.1044
6306.
Optimized Machine Learning Pipeline for Object Detection in Automotive and Surveillance Systems
37
