
Prediction of EV Charging Patterns Using Hybrid Machine Learning
Algorithms
Sathishkumar S
and Yogesh Rajkumar R
Bharath Institute of Higher Education and Research, Department of Computer Science and Engineering, 600073, Chennai,
Tamil Nadu, India.
Keywords: Electric Vehicles (EVs), Machine Learning, Ensemble Learning, Charging Behavior Prediction, SMAPE,
Energy Consumption, Battery Cost, Driving Range Limitations.
Abstract: The transportation industry is progressing toward electric cars. Though their acceptance continues to grow,
there are still several factors that limit their widespread use. These reasons citing the relatively short driving
range of electric vehicles and the cost of battery production and maintenance. The Energy consumption of
EVs is becoming increasingly important in recent times, owing to the swift adoption and introduction of
EVs in the market. Consequently, in order to address such challenges researchers are using machine
learning models to accurately predict electric vehicle charging behavior. Of which ensemble learning
method outperforms the previous one substantially. This is supported by notably lower Symmetric Mean
Absolute Percentage Error (SMAPE) scores, meaning that the charging behaviours are more accurately and
reliably forecasted.
1 INTRODUCTION
Electric vehicles EVs rapidly gain prominence as a
technology in achieving sustainable mobility
objectives driven by reducing carbon emissions in
urban areas globally. EVs have been touted as a key
solution to the climate crisis because they can cut
down carbon emissions by as much as 45% versus
conventional internal combustion engine cars. The
widespread use of EVs does have downsides, such
as extended charging periods and high energy
requirements from the electric network. This is
especially relevant in urban areas, as growth in their
populations is expected to cause issues of increasing
energy demand and increased burden on existing
infrastructure Çolak, B. (2023). EV charging
behaviour and projections need to be managed to
improve the user experience and reduce strain on
power systems. The biggest challenge for actual EV
charging forecasting would be to be able to
accurately predict the charging behaviour (length of
charging sessions, energy used, etc.) Such forecasts
would help utilities mitigate peak demand, improve
charging schedules, and enable a stronger grid. EV
charging pattern prediction is further complicated
by the various factors including end-user behaviours,
vehicle types and time of the day etc (Guo et al.
2023). To analyze the demand in the electric vehicle
charging loads, this work introduces a data-driven
method based on machine learning approaches,
including Random Forest (RF), XGBoost, Support
Vector Machine (SVM), and Artificial Neural
Networks (ANN) techniques. This model seeks to
improve the accuracy of charging predictions, using
historical data with advanced ensemble methods,
capturing both energy consumption and session
length (Li, D et al. 2022). Ultimately, these insights
should facilitate the adoption of sustainable urban
transportation options by optimizing EV charging
infrastructure and creating a better coordinated
system.
2 LITERATURE SURVEY
Lee presented a unique data set related to EV
charging, containing about thirty thousand sessions.
They applied GMM for modeling the timing of
session duration and its required energy, accounting
the variations of the estimated arrival times.
SMAPEs of 15.9% and 14.4% were obtained for
Sathishkumar, S. and R., Y. R.
Prediction of EV Charging Patterns Using Hybrid Machine Learning Algorithms.
DOI: 10.5220/0013872800004919
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Research and Development in Information, Communication, and Computing Technologies (ICRDICCT‘25 2025) - Volume 1, pages
779-788
ISBN: 978-989-758-777-1
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
779

energy consumption and session time, respectively
Dias Vasconcelos, S., et al. (2024).
Çolak employs a machine learning approach to
study how the flow of coolant and the gradient of a
road impact the battery (energy store) of an electric
vehicle that operates on a battery (Ali et al. 2021).
This opens with acknowledging the computing
resources required to train larger datasets, but points
out that quantity is argued to be one of the most
important factors when it comes to increasing
prediction accuracy for Artificial Neural Networks
(ANN) (Montesinos López et al 2022), and that if a
dataset is not large enough its value is arguable.
Session start time and session length prediction
Yu 1 used mean estimate. Then, an estimation of
energy consumption was achieved by linear
regression based on the length of the session (Yu et
al. 2014). To allow the system to stabilize and to
average the loading state in such a way that is more
minimized. However, no quantitative evaluation of
the predicted performances was performed.
(Krishnan et al. 2023)
Khan (2023) utilized multiple algorithms,
including SVM and RF, to predict a station used for
charging's daily energy demand the next day
dependent on the previous day's energy
consumption, derived by classifying the days
(performed by clustering) and making predictions
for each day afterwards. The most accurate results
were provided by PSF-based method with 14.1%
of SMAPE on average Alanazi, F. (2023).
Yilmaz and Krein and Habib explored the use of
Vehicle-to-Grid (V2G) topologies to mitigate the
threatening effects of charging a fleet of electric
vehicles on the distribution network. V2G
technologies have been shown to improve the
efficiency, stability, and reliability of the grid.
According to Yilmaz and Krein, V2G technology
has advantages such as load balancing, current
harmonic filtering, and power management Alanazi,
F. (2023). However, V2G technology can cause
deep discharging of EVs. Decrease in battery
lifetime and consumer satisfaction due to
degradation of EV battery.
A.Almaghrebi used multiple models to predict
energy consumption from the charging stations data
which are publicly available in US states. The input
elements included season, weekday, kind of place,
and charging cost, as well as past billing
information. This train on the test set gives XGBoost
even better performance than SVM, RF and linear
regression.
3 METHODOLOGY
The methods of this study generally adhere to best
practices for machine learning. It starts by collecting
a large amount of data from different sources related
to EV charging patterns and battery life. This
dataset contains some important features for
building an accurate predictive model. This data is
extensively pre-processed so that quality and
consistency is maintained, which may also include
cleaning that removes erroneous or missing values
and standardization that improves model
performance Naqvi, S. S. A., et al. (2024). Data sets
can typically be split into a training set and a testing
set, where the training set is used to familiarize the
model with the patterns in the data, and the testing
set checks to see how well the model performs with
unseen data. Feature selection helps the model to
pinpoint relevant variables that influence battery
longevity. Feature selection is used to find the most
significant factors that influence patterns of EV
charging and battery life; therefore, the model can
know these key parameters and avoid overfitting
(Uzair et al. 2021).
Various complex factors affect EV charging
behavior, such as users' patterns, charging session
duration, energy requirement, and availability of
charging infrastructure. One algorithm alone
wouldn’t fully capture all of these patterns. When
using ensemble learning with models like SVMs,
kernel density estimators, and random forests, it is
possible for the system to utilize the strengths of
each individual model, resulting in a more rounded
and accurate prediction. This study uses data from
public and residential charging datasets which can
each possess different properties like charging
velocity, or frequency of sessions. This diversity of
the data can be better managed by the ensemble
model, using different algorithms— like decision
trees for random forests and kernel methods for
SVM that may better enable the ensemble to
generalize across different types of data than a single
algorithm can do Zou, S., et al. (2024). The fact that
the ensemble methods decrease the model bias as
well as variance makes them more steady predictors.
While the individual performance of XGBoost was
very satisfactory in this study, the overall accuracy
was improved after applying an ensemble method
with a SMAPE of session duration of 10.4% and
7.5% for energy consumption. And as you may see,
these lower error metrics indicate that the ensemble
model has performed better in terms of error
minimization as it has a balanced approach (Li et al.
2023)
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
780
4 PROPOSED METHOD
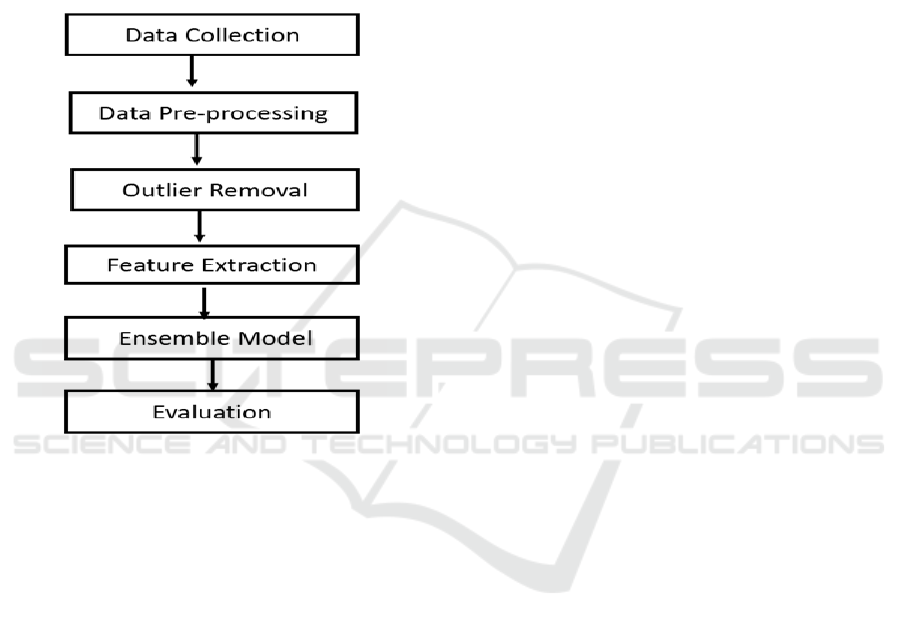
The System Architecture consists of following stages
and figure 1 shows the system architecture.
• Data Collection
• Preprocessing
• Outlier Removal
• Feature Engineering
• Model Selection
• Analysis and Evaluation
Figure 1: System Architecture.
5 IMPLEMENTATIONS
5.1 Data Collection
This study consists of three phases, the Data
Collection phase is the first phase of it. Data are
typically expropriated from some public source.
This work will leverage the ACN dataset (Chou et
al. 2023), which is one of the few publicly available
datasets. These include charge records from JPL and
Caltech, both university campus stations. The
Adaptive Charging Network (ACN) dataset (see
sources) is a rich dataset specifically designed for
studying EV charging sessions and has been widely
used in numerous research works to analyze EV
charging behavior, data on energy consumption
patterns and charging demand forecasting. The
California Institute of Technology and other
collaborators developed this dataset that details
charging sessions from the ACN, a network of EV
charging stations. Algorithms trained on the ACN
dataset, typically using machine learning, are then
utilized to generate predictive models of energy
consumption, later employed to optimize charging
infrastructure. For researchers in electric vehicles,
the dataset is invaluable due to the real-world,
timestamped EV charging events it provides under
different circumstances, enabling understanding that
addresses infrastructure planning, energy
management, and the emergence of responsive,
optimized charging paradigms in EV networks.
Further, other stations are publicly available, but the
JPL is only open to workers and therefore will not
be considered in this work. (Zhao et al. 2023)
There is a small weather centre on the Caltech
campus that we could have used, but the interval
records for the breeze were erratic with missing
data. The site also did not record factors such as
precipitation and rainfall. Thus, we utilized
meteorological data, specifically the NASA Modern-
Era Retrospective analysis for Research and
Applications (MERRA-2). (Zoerr et al. 2023).
5.2 Preprocessing
Following data gathering, the pre-processing stage
starts. In this case, the dataset has undergone many
processes to guarantee its accuracy and stability. In
order to look for duplicate and missing values, we
went over the data. The dataset was confirmed to be
devoid of duplicate or missing occurrences after
preprocessing. Duplicate values are often detected by
comparing key attributes that uniquely identify a
session, such as the session ID, vehicle ID, start time,
and location. In some cases, partial duplicates may
exist where entries have slight discrepancies (e.g.,
slight variations in timestamps). We applied
additional logic, such as rounding timestamps to the
nearest minute or averaging values, to ensure that
only one record per charging event is kept. Pre-
processing and cleaning of the data is done to
guarantee the prediction model’s effectiveness and
accuracy.( Dominguez et al. 2023), (Abdelsattar et al.
2024). Figure 2 shows the consumption of energy
and session duration.
Outliers’ identification is a crucial phase in the
approach that comes after data collection and pre-
processing. By protecting the data integrity and
improving the accuracy of machine learning models
when predicting the battery life of electric vehicles,
this procedure increases the dependability of
sustainable transportation initiatives. Therefore, we
decided to perform the following,
Prediction of EV Charging Patterns Using Hybrid Machine Learning Algorithms
781

• Use the isolation forest approach.
• To conduct multivariate outlier
identification.
Figure 2: Consumption of energy (left-side diagram),
session duration (right-side diagram) boxplots.
The examples with short average path lengths on the
iTrees are the outliers. The observations are
"isolated" by choosing a variable at random,
variable's maximum and lowest. Until every
observation has been isolated, partitioning is done
recursively. Following partitioning, the observations
with shorter path lengths for certain sites are
probably the outliers. (Uzair et al. 2021) Figure 3
shows the procedure for identifying the target
variables' outlier.
Figure 3: Outlier detection using isolation forest.
Next, the test-train splitting technique is applied to
divide the Pre-Processed dataset. The test data and
the train data are two distinct sets that comprise the
total dataset. Test data makes up 20% of the total
dataset and is mainly assessed for consideration of
functionality, accuracy, and other metrics. Eighty
percent of the data consists of data required for
training. The model is trained using the
recommended algorithmic strategies on this train set
of data. A pattern found in the train data is used by
the algorithm to learn. (Wang et al. 2020).
5.3 Feature Extraction
The process of utilising human expertise to turn data
into a meaningful representation is known as feature
engineering. Despite being labor-intensive, this
technique is crucial because it addresses a flaw in
the learning algorithms. We then perform the
following actions,
• Time = (Minute/60) + hour
• Use time to generate numeric data.
• Calculate average session duration time
• Calculate average departure time
• Calculate average energy usage
This is accomplished by obtaining the charging
record's user ID and compiling all of his prior
records. On the other hand, temporal data and
certain properties. (Maghfiroh et al. 2024). The
trigonometric translation is carried out as follows in
order to depict the closeness of these values:
(1)
(2)
Where,
• f
x----
Cyclic feature’s 1
st
component.
• f
y ----
Cyclic feature’s 2
nd
component.
• f
y ----
Feature that has to be modified
One-hot encoding, which converts a lonely variable
having n points, k unique classes to k binary
variables having n points each, was utilised to
change other categorical variables. (Khan et al
2023). Table represents the feature and description.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
782

Table 1: Extracted Features and their descriptions.
Feature
Description
session_length
Length of charging duration,
target variable
kWh_delivered
Session energy
consumption, target variable
time_con
Numerical representation of
the connection time (arrival
time)
time_con
Day of the week, one-hot
encoded
is_weekend
Binary variable indicating
whether the session took
place in a weekend
holiday
Binary variable indicating
whether the session took
place on a US federal
holiday
hr_x, hr_y
Sine and Cosine
components of the hour
day_x, day_y
Sine and Cosine
components of the day
mnth_x, mnth_y
Sine component of the
month
mean_d_time
Historical average departure
time
mean_con
Historical average
consumption
mean_dur
Historical average session
length
max_traffic_aft_arvl
maximum traffic level after
arrival
avg_temp_nxt
average temperature of next
10 hours
avg_rain_nxt
average rainfall of next 10
hours
5.4 Model Evaluation
The most important part of the model selection
process is figuring out which machine learning
algorithm is most appropriate for a certain task. To
make a choice, a number of models must be tested
and assessed. Model training is an essential step in
the production process. (Alanazi, F. 2023).
Below is the list of models that have been performed
and analysed in the study.
• Random Forest
• XG Boost
• Support Vector Machine (SVM)
• Deep ANN
In the ACN dataset, the charging sessions in the
calendar year of 2019 are selected for the training
process to consider the seasonal factors. Split 80%
data for training and 20% for testing. During training
time, we have used Kfold cross-validation, it means
that training was done K times excluding 1/K of data
for testing at each time. Most people will use a K
value of 10, a common range is between 9 and 12.
We used the grid search, which tests a few variables
to discover the better set, for optimization. In order
to be efficient, we performed the grid search with 5-
fold cross-validation. (Kumar et al. 2023).
We attempted ensemble learning based on the
foundation of most of the studies above. For the
voting regressor, you train up multiple bases over
the training data and take the mean as the final
output. But the stacking regressor implemented the
stacked generalization approach. (Noor et al. 2024).
We propose a new ensemble learning method for
enhancing accuracy of Electric Vehicle (EV)
charging behaviour prediction. Nested ensemble
methods rely on the most heterogeneous, quality
forecasting model by synthesizing the outputs of
multiple machine learning algorithms. We utilize
Support Vector Machines (SVM), XGBoost, Deep
Artificial Neural Networks (ANN) and Random
Forest (RF) to maintain the best predictive
capabilities of the four given the high complexity
and non-linear nature of the features in EV charging
data.
By creating many decision trees with random
subsets of the features and samples, Random
Firerous, an ensemble method Every tree makes its
own class prediction, and the class that gets most
votes becomes the final prediction. It is widely used
in classification and regression problems to enhance
accuracy, mitigate over-fitting, and present feature
importance. XGBoost is well-regarded for its
performance and scalability capabilities, fast and
efficient handling of complex data patterns, and is
capable of performing in-built feature importance.
The base of this process is the algorithm that tries to
correct the errors based on what its predecessors
have predicted, allowing for better predictions in an
ideal situation like EV charge prediction. Bagging:
bootstrap aggregating (for a general ensemble
method that can boost the stability and accuracy of
machine learning algorithms) The mechanism is to
train different copies of a model on different parts of
the training dataset, and combine their outputs. This
helps in reducing model variance and overfitting,
especially in decision trees.
Because Support Vector Machines are helpful
with varying degrees of linearity and non-linearity,
as well as less tendency to overfit, they are selected.
As for SVMs, they work effectively in high-
dimensional spaces, which is crucial to capture the
Prediction of EV Charging Patterns Using Hybrid Machine Learning Algorithms
783
complex EV charging patterns, which also are time-
and weather- and user-behavior based. To be able to
model the complex, non-linear relationships in large
datasets, the implementation of Deep Artificial
Neural Networks is integrated. Together with access
to high data throughput, ANNs are able to pick up
complex correlations that regular algorithms can
miss, yielding highly accurate and generalizable
predictions across a variety of different charging
scenarios. So, by using this ensemble learning
framework, the strengths of each individual
algorithms can all be drawn up together to build a
strong model to capture how the EV is used. The
results of such models not only provide higher
accuracy of the prediction but also better robustness
and adaptability of the forecasting system overall,
which is important for an efficient, reliable planning
and management of the EV Charging infrastructure.
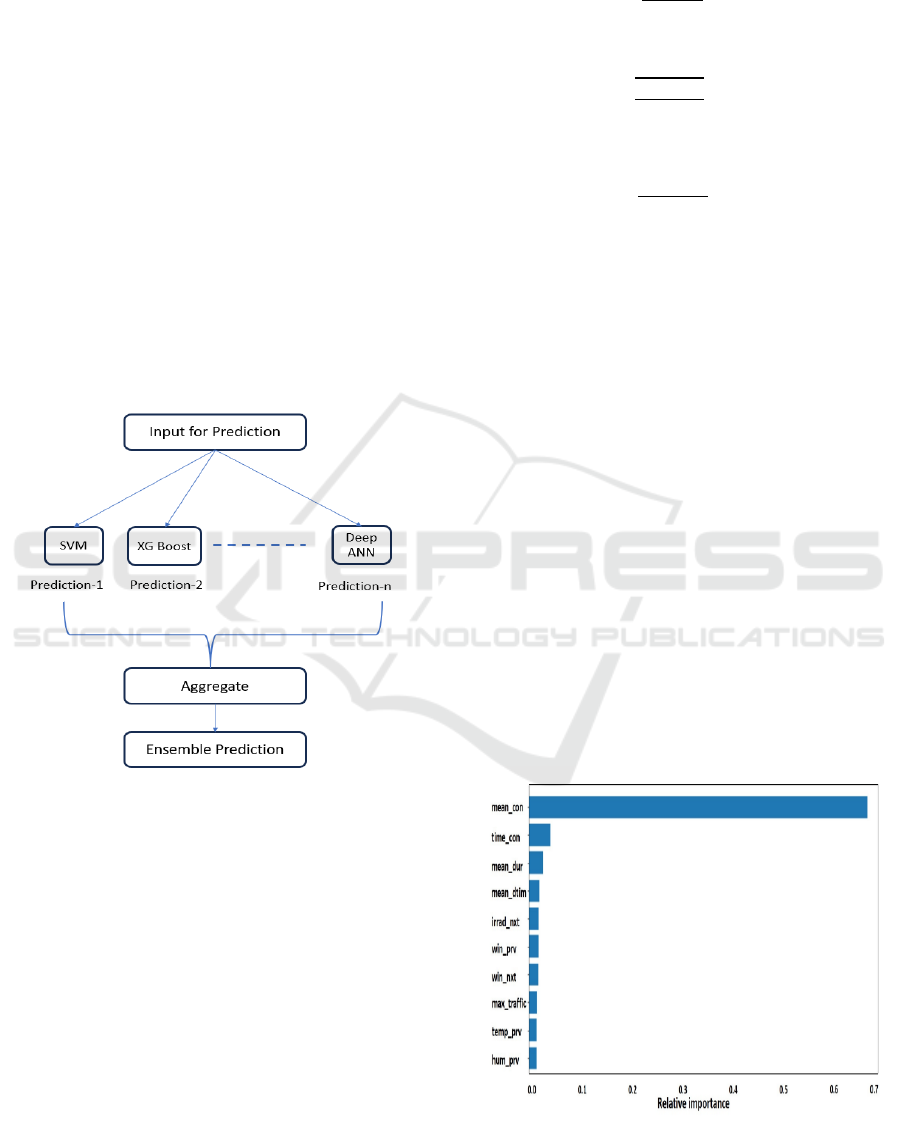
Figure 4 shows the ensemble technique.
Figure 4: Illustration of Ensemble technique.
5.5 Evaluation and Discussion
The assessment criteria used to determine how well
the regression model works are the R
2
, MAE, MSE,
and RMSE.
Metric calculatory equations are provided below
where,
• y
i
--- original value
• y
p
--- expected value
• n --- total occurrences
R
2
value, quantifies the predictability of the
dependent variable's variance from independent
factors.( Linardatos, P et al. 2021)
The MAE is given as
(3)
The RMSE is given as
(4)
The R-Squared is given as
(5)
The RF method, which may be used to visualise the
variable significance, is where we start the
experiment. This feature selection technique
eliminates several variables that are seldom useful
and frequently impair performance.
Ten-fold cross-validation is a technique that may be
used to obtain an accurate assessment of an ML
model's capacity for generalisation as well as to
select the optimal collection of hyperparameters
regarding a given dataset. The effectiveness of these
methods on the characteristics of the input and aim
output dataset was evaluated. As a result, 10 loops
are used in the training process, and the precision of
the process was calculated by averaging the results
from each loop. We chose to include the least
significant variables in the model training since, in
this instance, their inclusion resulted in a negligible
performance boost. Variables can also be arranged
according to their respective importance. The
contribution of each characteristic in identifying the
best splits determines this.( Yu et al. 2014). The top
ten crucial factors for session length and energy use
are displayed in Figures 5 and 6, respectively.
Figure 5: Top ten features for session duration.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
784
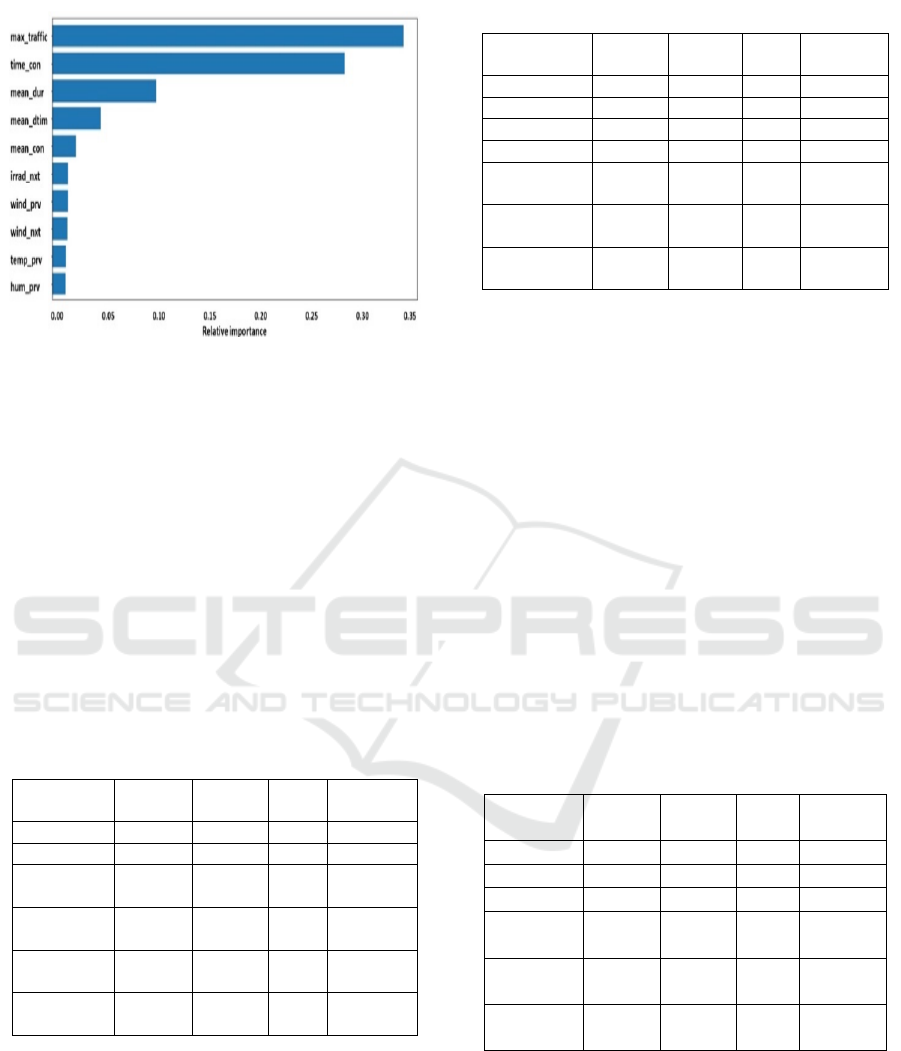
Figure 6: Top ten features for energy consumption.
5.5.1 Session Duration Predictions
Search in grid technique was utilized to find models'
best parameters. We empirically found that the best
design for the deep ANN training possess 3 layers
consisting of a series of nodes in order of 64, 32, 16.
Since we anticipate the prediction to be a numerical
value, the output layer's activation was linear, and all
hidden layers' activation functions were Rectified
Linear Units (Relu). There were 32 people in the
training batch, and there were 15 epochs in total of
iterations.( Zhang et al. 2018). The training curve of
loss is displayed in Figure 5, and the tenfold cross
validation scores are compiled in Table 2.
Table 2: Training scores for session duration.
Model
RMSE
(mins)
MAE
(mins)
R²
SMAPE
(%)
RF
101
64.7
0.74
10.3
SVM
103
68.0
0.73
10.4
XG Boost
101
69.1
0.74
10.5
Deep
ANN
100.5
74.3
0.73
10.8
Voting
Ensemble
99.9
68.5
0.74
10.1
Stacking
Ensemble
99.9
69.3
0.74
10.2
While deep ANN performs somewhat worse, the
training results for RF, SVM, and XGBoost are
relatively comparable. As a consequence, we
combined the two ensemble models that performed
the best among the three models we used in the
training phase, improving the cross-validation scores.
We then display the test set results. Table 3 provides
a summary of the test set outcomes.
Table 3: Test scores for session duration.
Model
RMSE
(mins)
MAE
(mins)
R²
SMAPE
(%)
RF
98
64.7
0.64
10.1
SVM
102
68.0
0.63
10.1
XG Boost
101
69.1
0.64
10.1
Deep ANN
100.5
74.3
0.53
10.8
Voting
Ensemble
97.9
68.5
0.74
9.92
Stacking
Ensemble
97.9
67.3
0.74
9.95
User
predictions
430
394
-
4.20
69.9
As said, the ensemble learning strategy yields the
greatest outcomes.
5.5.2 Energy Consumption Predictions
This method was also used to the session length
prediction. The deep ANN design, was the lone
exception. There were twenty epochs. All of them
having size of 64. The train set's 10-fold cross
validation scores are summarised in Table 4.
The main standard metrics used in the following
table are:
• RMSE
• MAE
• R
2
• SMAPE
Here RMSE and MAE are entered in terms of kWh.
Table 4: Training scores for energy consumption.
Model
RMSE
(kWh)
MAE
(kWh)
R²
SMAPE
(%)
RF
5.49
3.40
0.69
11.9
SVM
5.65
3.53
0.67
12.6
XG Boost
5.56
3.49
0.68
12.4
Deep
ANN
5.61
3.60
0.67
12.9
Voting
Ensemble
5.50
3.42
0.69
12.0
Stacking
Ensemble
5.48
3.40
0.69
11.9
While the scores of remaining 3 techniques are
comparable, RF has the greatest ratings. The top-
most three models such as
• SVM
• XG Boost
• RF
Prediction of EV Charging Patterns Using Hybrid Machine Learning Algorithms
785
are selected for the creation of 2 ensemble
techniques. The results of the train which were
produced by the ensemble techniques, were
comparable to the top-performing RF model rather
than outperforming it. In Table 5, the test set results
are displayed.
Table 5: Test scores for energy consumption.
Model
RMSE
(mins)
MAE
(mins)
R²
SMAPE
(%)
RF
5.50
3.39
0.54
11.7
SVM
5.69
3.54
0.51
12.4
XG Boost
5.61
3.48
0.51
12.1
Deep ANN
5.65
3.55
0.55
12.5
Voting
Ensemble
5.54
3.41
0.69
11.8
Stacking
Ensemble
5.50
3.38
0.70
11.6
User
predictions
20.6
11.8
0.04
55.0
5.5.3Analysis and Discussion
Upon examining the SMAPE and total R2 of both
forecasts, it seems that the energy consumption
prediction may be more challenging. This aligns with
the previous works using ACN data. On the other
hand, the reverse was seen in another instance [24],
i.e., it was simpler to anticipate energy usage.
Furthermore, in the two cases the anticipation of the
performer about their action differed significantly
from their original action, underscoring necessity of
analysis. Better R2 and SMAPE values show that
users' forecasts regarding their energy usage are
somewhat more accurate than their predictions
regarding the length of the session. Moreover, in both
instances, ensemble learning predictions beat those of
individual ML models, with the impact being more
pronounced for session time prediction. This is due to
the fact that in first scenario, the training
performances of the top 3 performing models were
comparable, and merging their predictions produced
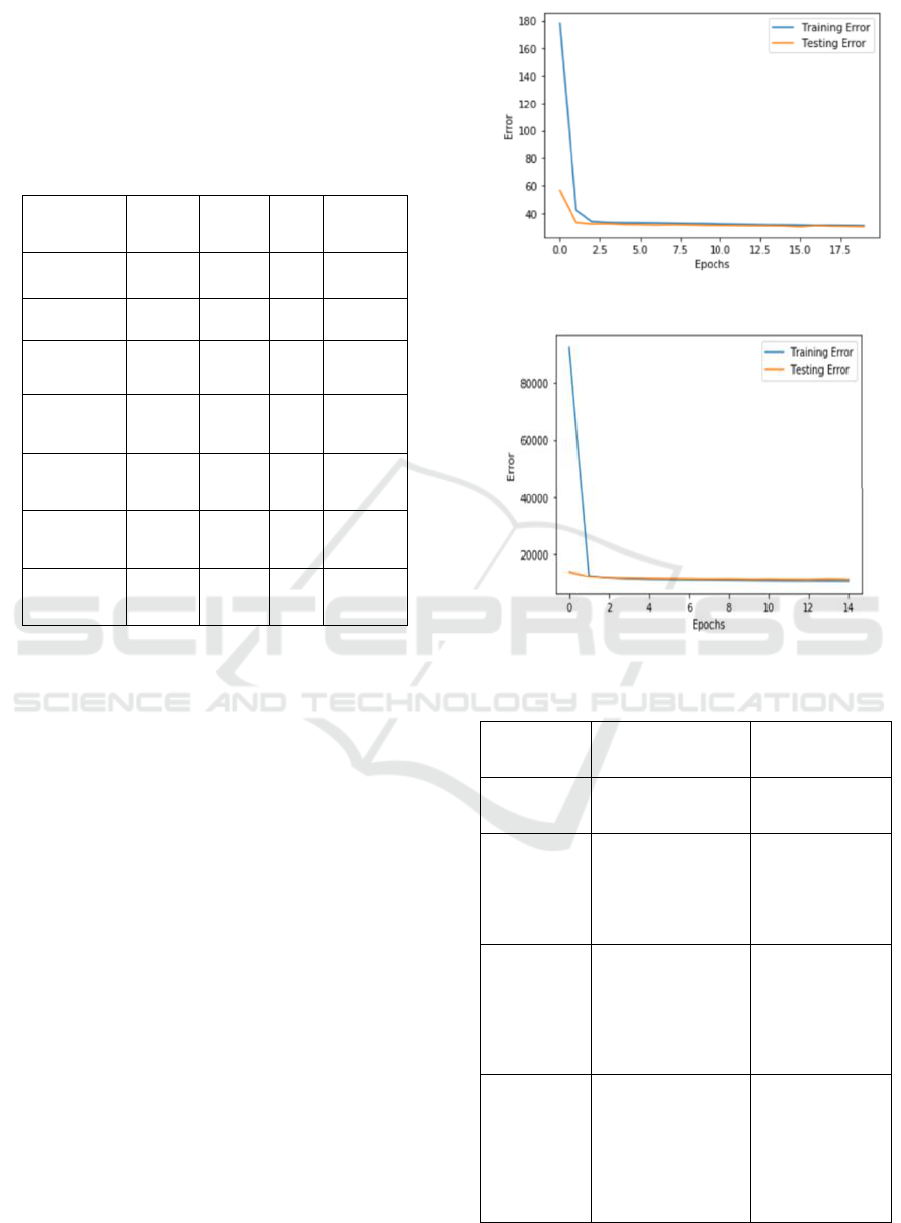
an improvement. Figure 7 and 8 shows the validation
loss curve. Jiang, Y., & Song, W. (2023),( Gandhi et
al. 2016). Table 6 shows the comparing performance.
Figure 7: Session duration’s curve of validation loss.
Figure 8: Energy consumption’s curve of validation loss.
Table 6: Comparing Performance to Earlier Work.
Session
Duration
Energy
Consumption
Dataset
SMAPE:
14.4%
SMAPE: 14.9%
ACN (historical
charging)
MAE: 80
minute
Not considered
German charging
data (historical
charging, vehicle
&
location info)
Not
considered
R2: 0.56
Nebraska public
charging
(historical
charging,
temporal
& location)
SMAPE:
9.4%
SMAPE: 8.5%
UCLA campus
(historical
charging)
and Residential
charging data
from
UK
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
786

6 CONCLUSIONS
In this study, we proposed an advanced system for
the scheduling-aware prediction of two critical EV
charging behaviors: duration for the EV session,
energy usage during these sessions. Unlike previous
research efforts that primarily rely on historical
charge data alone, this approach integrates additional
contextual information such as weather conditions,
traffic patterns, and local events. This comprehensive
dataset enables a more accurate and holistic
prediction of charging behaviors. To achieve this, we
trained two sophisticated ensemble learning
algorithms along with four well-known ML models:
SVM, XGBoost, Deep ANN, and Random Forest.
These results indicate that the prediction performance
of this models significantly outperforms previous
studies. Moreover, the machine learning
methodology was applied to analyse the vast amount
of test-related data, enabling the forecasting of
energy use and identification of the primary variables
influencing it. The inclusion of weather and traffic
data has proven particularly beneficial, providing
valuable insights that enhance prediction accuracy.
By applying these enhanced models to the ACN
dataset, we demonstrated a substantial improvement
in identifying both length of EV charging sessions
and associated energy consumption. This work not
only advances the state of the EV charging behavior
prediction, also but underscores the importance of
incorporating diverse data sources to achieve more
reliable and robust outcomes. In order to evaluate
generalizability and scalability and enable the
development of globally adaptive EV charging
infrastructure, future research could also concentrate
on applying these models across various geographic
regions or car types.
REFERENCES
Çolak, B. (2023). A new study on the prediction of the
effects of road gradient and coolant flow on electric
vehicle battery power electronics components using
machine learning approach. Journal of Energy
Storage.
Guo, X., Wang, K., Yao, S., Fu, G., & Ning, Y. (2023).
RUL prediction of lithium-ion battery based on
CEEMDAN-CNN BiLSTM model. Energy Reports.
Li, D., Liu, P., Zhang, Z., Zhang, L., Deng, J., Wang, Z.,
Dorrell, D. G., Li, W., & Sauer, D. U. (2022). Battery
thermal runaway fault prognosis in electric vehicles
based on abnormal heat generation and deep learning
algorithms. IEEE Transactions on Power Electronics.
Dataset Link. (n.d.). Available online: https://www.kaggle
.com/datasets/ignaciovinuales/battery remaininguseful
-life-rul (Accessed on November 30, 2023).
Dias Vasconcelos, S., et al. (2024). Assessment of electric
vehicles charging grid impact via predictive indicator.
IEEE Access, 12, 163307163323. https://doi.org/10.1
109/ACCESS.2024.3482095
Ali, A., Emran, N. A., & Asmai, S. A. (2021). Missing
values compensation in duplicates detection using hot
deck method. Journal of Big Data.
Montesinos López, O. A., Montesinos López, A., &
Crossa, J. (2022). Overfitting, model tuning, and
evaluation of prediction performance. In Multivariate
statistical machine learning methods for genomic
prediction (pp. xx-xx). Springer.
Linardatos, P., Papastefanopoulos, V., & Kotsiantis, S.
(2021). Explainable AI: A review of machine learning
interpretability methods. Entropy.
Yu, Y., Zhu, Y., Li, S., & Wan, D. (2014). Time series
outlier detection based on sliding window prediction.
Mathematical Problems in Engineering.
Krishnan, S., Aruna, S. K., Kanagarathinam, K., &
Venugopal, E. (2023). Identification of dry bean
varieties based on multiple attributes using CatBoost
machine learning algorithm. Scientific Programming.
Khan, F. N. U., Rasul, M. G., Sayem, A. S. M., & Mandal,
N. (2023). Maximizing energy density of lithium-ion
batteries for electric vehicles: A critical review.
Energy Reports.
Alanazi, F. (2023). Electric vehicles: Benefits, challenges,
and potential solutions for widespread adaptation.
Applied Sciences.
Kumar, M., Panda, K. P., Naayagi, R. T., Thakur, R., &
Panda, G. (2023). Comprehensive review of electric
vehicle technology and its impacts: Detailed investiga
tion of charging infrastructure, power management, an
d control techniques. Applied Sciences.
Naqvi, S. S. A., et al. (2024). Evolving electric mobility
energy efficiency: In-depth analysis of integrated
electronic control unit development in electric vehicles
. IEEE Access, 12, 1595715983. https://doi.org/10.11
09/ACCESS.2024.3356598
Uzair, M., Abbas, G., & Hosain, S. (2021). Characteristics
of battery management systems of electric vehicles
with consideration of the active and passive cell
balancing process. World Electric Vehicle Journal.
Zou, S., et al. (2024). Design and analysis of a novel
multimode powertrain for a PHEV using two electric
machines. IEEE Access, 12, 7644276457. https://doi.o
rg/10.1109/ACCESS.2024.3406541
Li, X., Yu, D., Byg, V. S., & Ioan, S. D. (2023). The
development of machine learning-based remaining
useful life prediction for lithium-ion batteries. Journal
of Energy Chemistry.
Chou, J.-H., Wang, F.-K., & Lo, S.-C. (2023). Predicting
future capacity of lithium-ion batteries using transfer
learning method. Journal of Energy Storage.
Zhao, J., Ling, H., Liu, J., Wang, J., Burke, A. F., & Lian,
Y. (2023). Machine learning for predicting battery
capacity for electric vehicles. eTransportation.
Prediction of EV Charging Patterns Using Hybrid Machine Learning Algorithms
787

Zoerr, C., Sturm, J. J., Solchenbach, S., Erhard, S. V., &
Latz, A. (2023). Electrochemical polarization-based
fast charging of lithium-ion batteries in embedded
systems. Journal of Energy Storage.
Najera-Flores, D. A., Hu, Z., Chadha, M., & Todd, M. D.
(2023). A physics-constrained Bayesian neural
network for battery remaining useful life prediction.
Applied Mathematical Modelling.
Dominguez, D. Z., Mondal, B., Gaberscek, M., Morcrette,
M., & Franco, A. A. (2023). Impact of the
manufacturing process on graphite blend electrodes
with silicon nanoparticles for lithium-ion batteries.
Journal of Power Sources.
Abdelsattar, M., Ismeil, M. A., Aly, M. M., & Abu-Elwfa,
S. S. (2024). Analysis of renewable energy sources
and electrical vehicles integration into microgrid.
IEEE Access, 12, 6682266832. https://doi.org/10.110
9/ACCESS.2024.3399124
Uzair, M., Abbas, G., & Hosain, S. (2021). Characteristics
of battery management systems of electric vehicles
with consideration of the active and passive cell
balancing process. World Electric Vehicle Journal.
Wang, Y., Zhao, Y., & Addepalli, S. (2020). Remaining
useful life prediction using deep learning approaches:
A review. Procedia Manufacturing.
Maghfiroh, H., Wahyunggoro, O., & Cahyadi, A. I.
(2024). Energy management in hybrid electric and
hybrid energy storage system vehicles: A fuzzy logic
controller review. IEEE Access, 12, 56097–56109.
https://doi.org/10.1109/ACCESS.2024.3390436
Khan, F. N. U., Rasul, M. G., Sayem, A. S. M., & Mandal,
N. (2023). Maximizing energy density of lithium-ion
batteries for electric vehicles: A critical review.
Energy Reports.
Alanazi, F. (2023). Electric vehicles: Benefits, challenges,
and potential solutions for widespread adaptation.
Applied Sciences.
Kumar, M., Panda, K. P., Naayagi, R. T., Thakur, R., &
Panda, G. (2023). Comprehensive review of electric
vehicle technology and its impacts: Detailed investigat
ion of charging infrastructure, power management,
and control techniques. Applied Sciences.
Noor, F., Zeb, K., Ullah, S., Ullah, Z., Khalid, M., & Al-
Durra, A. (2024). Design and validation of adaptive
barrier function sliding mode controller for a novel
multisource hybrid energy storage system based
electric vehicle. IEEE Access, 12, 145270–145285.
https://doi.org/10.1109/ACCESS.2024.3471893
Montesinos López, O. A., Montesinos López, A., &
Crossa, J. (2022). Overfitting, model tuning, and
evaluation of prediction performance. In Multivariate
statistical machine learning methods for genomic
prediction. Springer.
Linardatos, P., Papastefanopoulos, V., & Kotsiantis, S.
(2021). Explainable AI: A review of machine learning
interpretability methods. Entropy.
Yu, Y., Zhu, Y., Li, S., & Wan, D. (2014). Time series
outlier detection based on sliding window prediction.
Mathematical Problems in Engineering.
Zhang, X., Gao, F., Gong, X., Wang, Z., & Liu, Y. (2018).
Comparison of climate change impact between power
system of electric vehicles and internal combustion
engine vehicles. In Advances in Energy and
Environmental Materials (pp. 739–747). Singapore.
Jiang, Y., & Song, W. (2023). Predicting the cycle life of
lithium-ion batteries using data-driven machine
learning based on discharge voltage curves. Batteries.
Gandhi, S. M., & Sarkar, B. C. (2016). Chapter 11—
Conventional and statistical resource/reserve
estimation. In Essentials of mineral exploration and
evaluation. Elsevier.
Montesinos López, O. A., Montesinos López, A., &
Crossa, J. (2022). Overfitting, model tuning, and
evaluation of prediction performance. In Multivariate
statistical machine learning methods for genomic
prediction. Springer.
Wang, Y., Zhao, Y., & Addepalli, S. (2020). Remaining
useful life prediction using deep learning approaches:
A review. Procedia Manufacturing.
Wu, J., Kong, L., Cheng, Z., Yang, Y., & Zuo, H. (2022).
RUL prediction for lithium batteries using a novel
ensemble learning method. Energy Reports.
ICRDICCT‘25 2025 - INTERNATIONAL CONFERENCE ON RESEARCH AND DEVELOPMENT IN INFORMATION,
COMMUNICATION, AND COMPUTING TECHNOLOGIES
788
