
High-Level Synthesis of an Efficient Hardware Implementation for a
Smart Tactile Sensing System
Mar
´
ıa-Luisa Pinto-Salamanca
1 a
, Wilson-Javier P
´
erez-Holgu
´
ın
2 b
and Jos
´
e Antonio Hidalgo-L
´
opez
3 c
1
GridSE Research Group, Universidad Pedag
´
ogica y Tecnol
´
ogica de Colombia, Colombia
2
GIRA Research Group, Universidad Pedag
´
ogica y Tecnol
´
ogica de Colombia, Colombia
3
Departamento de Electr
´
onica, Universidad de M
´
alaga, M
´
alaga, Spain
Keywords:
Hardware-Efficient Implementation, Triaxial Contact Forces, Real-Time Embedded Tactile Sensing System.
Abstract:
Complex algorithms’ execution can be improved by means of carefully designed digital hardware. These
take advantage of parallelization techniques, heterogeneous architectures, pipelines, and reuse of functional
blocks, among others, to achieve low power consumption, low area overhead, and high real-time operating
speeds. However, the design process for these architectures is typically long and complex compared to equiv-
alent software implementations. This paper presents the design process and implementation of a hardware
architecture designed to reconstruct triaxial contact forces for innovative tactile sensing systems. Such algo-
rithms were implemented in hardware on a field-programmable gate array (FPGA) platform using a high-level
hardware design approach, which allows for a significantly reduced design effort and accelerates the validation
process of system functionality. The hardware design flow considers the integrated circuit design cycle and is
based on the evaluation of functionality and efficiency metrics. The maximum estimation error for the hard-
ware implementation was around 14.7%, with an average response time of 58.68 ms, a power consumption
of 0.871 W, and a speed of up to 65.89 MBps. The hardware design and results obtained here can be applied
in different tactile sensing systems such as robotics, prosthetic hands, biosensing, human-computer interfaces,
and healthcare.
1 INTRODUCTION
Computationally demanding problems such as mathe-
matical models of complex physical phenomena, ma-
chine learning techniques, and signal processing sys-
tems can be described by algorithms implemented in
software (running on a standard processor) or in ded-
icated hardware. The key difference between these
two methods lies in the way the respective operations
are calculated. In the software approach, algorithms
are implemented using a programming language, and
the resulting instructions are executed sequentially ac-
cording to the characteristics of the processor archi-
tecture (Stallings, 2010). In the hardware approach,
the algorithm is implemented using a hardware de-
scription language (HDL), in which operations are ex-
ecuted in parallel in a set of functional blocks that
a
https://orcid.org/0000-0002-2089-0683
b
https://orcid.org/0000-0001-5238-4470
c
https://orcid.org/0000-0001-9505-9141
process data according to the register transfer level
(RTL) principles (Plusquellic, 2017). The hardware
implementation is based on the use of combinational
circuits such as multiplexers, adders, multipliers, and
sequential components like registers, memories, and
control units.
The choice between hardware and software im-
plementation approaches depends on design require-
ments, including flexibility, parallelism, operating
conditions, and metrics such as performance, en-
ergy efficiency, and power consumption (Schaumont,
2013). Software implementations are more flexible,
less complex, and reduce design costs. Hardware im-
plementations, on their part, improve performance,
energy efficiency, and power density, albeit with a
significant increase in design complexity and devel-
opment time.
Having an efficient hardware implementation is
essential for applications that require speed, real-time
computing, complex computation, and large volumes
of data, such as Machine Learning (Mohammadi
524
Pinto-Salamanca, M.-L., Pérez-Holguín, W.-J. and Hidalgo-López, J. A.
High-Level Synthesis of an Efficient Hardware Implementation for a Smart Tactile Sensing System.
DOI: 10.5220/0013839800003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 524-531
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

et al., 2025), signal processing (Xia et al., 2023), dig-
ital design (Lifa et al., 2015), and robotics (Schenck
et al., 2017), among others.
In particular, smart tactile sensing systems are one
of the most computationally demanding applications
today. These allow the emulation of the functioning
of the sense of touch through the use of sensors, elec-
tronic interface circuits, and tactile decoding systems
(Dahiya et al., 2010). Tactile sensing systems process
contacts from information captured by multiple tactile
sensors, and the execution of tactile event reconstruc-
tion algorithms running on high-performance hard-
ware or software platforms (Ibrahim et al., 2018b).
Tactile emulation is fundamental in object manip-
ulation and grasping tasks, as well as, replicating the
exploratory action of contact, for applications such as
human-robot interaction (Han et al., 2024), and pros-
thetic hands (Ham et al., 2023). Detecting the distri-
bution, intensity, and temporal evolution of forces in
real time is critical for both tactile property processing
and sliding control loops (Jang et al., 2024).
There are several ways to perform contact force
estimation depending on the type of tactile sensor em-
ployed and its transduction technology, the force esti-
mation model, and the software or hardware strategy
adopted for its implementation. In all cases, tactile
emulation imposes that the response must be inde-
pendent of the contact phenomenon (i.e., generaliz-
able), independent of the contact area (i.e., scalable),
and with a predictable response time and minimal
resource consumption (i.e., efficient) (Wasko et al.,
2019). The transduction technology and the force re-
construction model constrain the generalization and
scalability attributes, while software and/or hardware
implementation of the model defines the efficiency
feature, see Figure 1.
Although there is a large amount of research
on tactile sensing systems reported in the literature,
most contact force reconstruction implementations
are performed on PCs or workstations. In contrast,
hardware-integrated tactile sensing systems operating
in real time are less common. Among these, the most
remarkable works are those describing parallel hard-
ware implementations on Field-Programmable Gate
Arrays (FPGAs) (Hosseinabadi et al., 2021). Other
authors focus their efforts on electronic interfaces
for sensor data acquisition, communication, and ac-
celerated execution, using high-performing analog-
to-digital converters (ADCs) (Kerner et al., 2022),
graphics processing units (GPU) (Zhao et al., 2025),
and single-board computers (or System on Chips)
(Ma et al., 2019).
This work presents the design and implementation
of efficient hardware architectures to reconstruct tri-
axial contact forces in the tactile data decoding stage
of smart tactile sensing systems. The developed archi-
tectures are implemented on an FPGA platform using
a high-level hardware design approach, significantly
reducing the required design effort and accelerating
the system functional validation process. The hard-
ware design flow is based on the typical integrated
circuit design cycle and is guided by some metrics
evaluation criteria.
This paper is organized as follows. Section 2 sum-
marizes the hardware alternatives for the hardware
implementation of efficient architectures and the use
of high-level synthesis tools for the entire design pro-
cess. Section 3 describes the proposed methodology
to assess the hardware design of two contact force re-
construction algorithms. Section 4 reports the exper-
imental results and discusses our main findings. Fi-
nally, Section 5 concludes the paper and draws future
works.
2 EFFICIENT HARDWARE
IMPLEMENTATIONS
Some platforms commonly used for the hardware im-
plementation of complex and/or large algorithms in-
clude FPGAS, System on Chip (SoCs), FPGA-SOCS,
Graphic Processing Units (GPUs), and Application
Specific Integrated Circuits (ASICs), among others.
Each of these has different advantages and/or disad-
vantages that can enhance or reduce system perfor-
mance depending on the characteristics of the appli-
cation. This makes a correct choice of the platform a
crucial technical aspect in the first design stages.
Computer architecture capabilities can be signif-
icantly increased through parallelism or heterogene-
ity strategies, which allow obtaining a low-power ar-
chitecture for high-speed and real-time applications
(Gardezi et al., 2019). Alternatively, multi-core archi-
tectures have become a popular solution to the grow-
ing demand for computing power in modern applica-
tions (Racordon and Buchs, 2016). Other heteroge-
neous platforms may be composed of combinations
of CPUs with GPUs, ASICs, or FPGAs. These are
typically geared toward massive data processing sup-
ported by the use of hardware accelerators (HW ac-
cele) with high energy efficiency and reconfigurable
options to improve latency, energy consumption, or
hardware flexibility (Zhu et al., 2019).
Regarding efficiency, it can be assumed that the
implementation of computationally intensive algo-
rithms is considered ”efficient” when, in addition to
meeting the expected functionality of the system, op-
timal resource management decisions and compliance
High-Level Synthesis of an Efficient Hardware Implementation for a Smart Tactile Sensing System
525
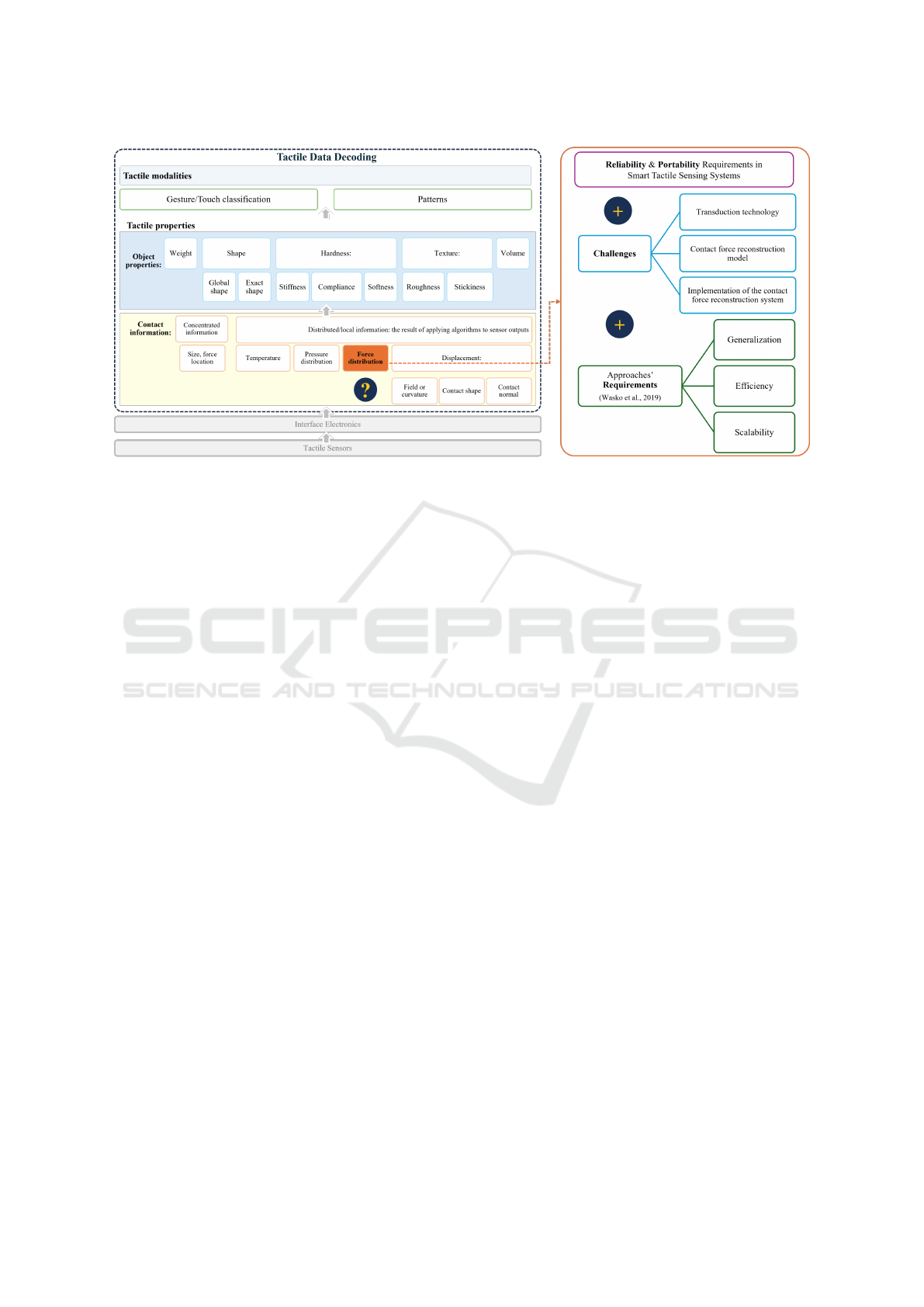
Figure 1: Hardware design challenges in the contact force reconstruction problem.
with constraints are also considered during the de-
sign and verification processes. This can be measured
through evaluation metrics, such as the use of hard-
ware resources, energy consumption, performance,
speed, processing time, memory, and accuracy. The
number of metrics considered in each case depends
on the complexity of the algorithm implemented.
2.1 Efficient Smart Tactile Sensing
Systems
Hardware designers of tactile-sensing systems face
challenges such as real-time response, reliability,
shrinking area sizes, and low-power consumption. All
of these elements constitute a broad field of research
usually known as “real-time integrated tactile sensing
systems.”
(Magno et al., 2017) and (Magno et al., 2018) ad-
dress efficiency from the system energy consumption
point of view, considering wearable and prosthetic ap-
plications powered by batteries. In such works, a low-
power embedded system based on a parallel ultralow-
power processor PULP is used to demonstrate the
energy-efficient implementation of tactile data decod-
ing circuits. Those approaches focus on maximiz-
ing energy efficiency, improving computational per-
formance by means of two strategies: i) parallel archi-
tectures for near-threshold operation, based on multi-
core clusters, and ii) low-power fixed-function hard-
ware accelerators coupled with programmable and
flexible processors.
In (Alameh et al., 2019), an efficient tactile pro-
cessing system is proposed for object recognition
by using a learning solution to classify three tactile
modalities. That work evaluates convolutional neu-
ral networks CNN accelerators as an efficient alter-
native of embedded intelligence based on system-
on-module low-power consumption and high perfor-
mance. (Ibrahim et al., 2018a) demonstrate the imple-
mentation of machine learning techniques integrated
with approximate computing methods as a solution to
tactile data decoding with low-latency, real-time op-
eration, and ultra-low power consumption constraints
in high computational complexity applications.
In (Fleer et al., 2020), a machine learning model
is presented for the discrimination of unknown ob-
ject shapes with a rigid tactile sensor array. In that
work, the efficiency is seen from the software context
as the algorithm’s ability to simultaneously execute
tasks, such as feature extraction and control strategy
calculation, while continuously acquiring data online.
For that, the authors formalize the target task of ob-
ject identification in a reinforcement learning frame-
work. In that sense, efficient smart tactile sensing is
also an issue of optimizing multiple variables that can
be faced with hardware implementations on embed-
ded electronic systems.
2.2 High-Level Approach to Hardware
Design Implementation
Hardware design based on high-level system tools is
becoming increasingly popular, as it simplifies and
speeds up the development process of complex sys-
tems. High-level synthesis (HLS) is an automated
design process for digital systems that focuses on
mapping behavioral or algorithmic specifications (de-
scribed in C/C++) onto register-transfer-level (RTL)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
526

structures. This strategy accelerates the verification
process for early-stage designs, enabling hardware
designers to enhance functional features while im-
proving optimization targets (Skalicky et al., 2013).
The HLS design cycle is performed in several
stages. First, the behavioral description of a design
is analyzed and architecturally constrained using an
HLS tool. Then, the scheduling and trans-compile
procedure maps (from the transaction level model
or TLM to RTL) of the design are carried out in a
hardware description language (HDL). Next, a func-
tional validation is carried out in HLS based on two
simulation stages: i) untimed that focus on validat-
ing the functions to be synthesized through functional
testbenches, and ii) RTL cycle-functional testbenches,
and RTL cycle-accurate that supports functional com-
parison between untimed and RTL cycle-accurate re-
sults. After that, the translation and verification stages
allow the correlation between TLM and RTL struc-
tures, supporting the identification and observation of
the substructures in a design, which can contribute to
the analysis and evaluation of the reliability of digital
designs.
3 MATERIALS AND METHODS
3.1 Contact Force Reconstruction
Algorithm for Tactile Sensing
Systems
The algorithms implemented in this work are the
Triaxial Forces Reconstruction Algorithm (TFRA)
(Pinto-Salamanca et al., 2023) and the Sparse Triaxial
Force Reconstruction Algorithm (SpTFRA) (Pinto-
Salamanca et al., 2024). These are based on analytical
models and allow the reconstruction of triaxial con-
tact forces using normal stress tactile sensor arrays.
The TFRA and SpTFRA algorithms are con-
strained to the estimation of triaxial forces for sim-
ple, static, and continuous contact conditions on non-
deformable plane surfaces. Some positive features of
these algorithms include that they allow input data to
be independent of the transduction technology used
and that they can employ low-cost and widely avail-
able commercial tactile sensors, such as piezoresis-
tive, resistive, or capacitive sensors. The latter are
highly valued in processing contact forces in robotic
or biomedical contexts.
In addition to a software implementation of the
mentioned algorithms, they can also be efficiently im-
plemented in hardware, so that the requirements of
real-time integrated tactile sensing systems can be
met. Thus, during the hardware design, functional
verification, and system validation stages, we employ
a comprehensive approach that considers both algo-
rithm functionality and hardware efficiency. This ap-
proach seeks a hardware implementation of the TFRA
and SpTFRA algorithms that meet the criteria defined
in (Wasko et al., 2019), which include having a gener-
alizable and scalable implementation that achieves the
lowest error estimation, minimizes power consump-
tion, utilizes hardware resources efficiently, and meets
memory requirements, while maintaining the highest
throughput and the shortest response time.
3.2 Integrated Circuit Design Cycle
Hardware design comprises four steps: i) software
implementation features, ii) hardware design, iii) de-
sign verification, and iv) system validation.
3.2.1 Software Implementation Features
Software implementations of the TFRA and SpT-
FRA algorithms were carried out in Matlab® Math-
Works™ 2021. These algorithms were validated on
two tactile sensor arrays covering areas of 40×20
mm
2
(hereafter sensor 1), and 40×40 mm
2
(hereafter
sensor 2), limited to a 100-taxel tactile sensor array
for normal stress data inputs up to 50,000 N/m
2
with
resultant forces close to 6 N.
The system specification stage allowed for the
identification of algebraic requirements, data ranges,
and computational complexity. The functional char-
acterization of the TFRA and Sp TFRA algorithms
needs to perform some arithmetic operations, such as
generalized multiplication of dense matrices by vec-
tors, the square root, and the inverse tangent opera-
tion. In the design process, the operations that can be
executed using sequential blocks were also identified,
along with the memory sizing for the constant matri-
ces and variable vectors in the model. The input and
memory load data were pre-encoded using a 32-bit
floating-point format.
3.2.2 Hardware Design
The hardware design stage includes a review of de-
sign techniques for efficient hardware implementa-
tion, high-level design of the systems to be imple-
mented, and the low-level design of such systems
in an HDL. The entire hardware design process was
conducted using AMD Vitis™ HLS 2022 and Vi-
vado™ Design Suite 2022. The TFRA and SpT-
FRA hardware implementations were evaluated on a
Zynq UltraScale+ MPSoC ZCU102 FPGA develop-
ment board. The design environment includes high-
High-Level Synthesis of an Efficient Hardware Implementation for a Smart Tactile Sensing System
527
level design tools and a design cycle that begins with
the description of each functional block using C++.
Furthermore, the design flow enables high-level sim-
ulation, functional verification with simplified file
management, and preliminary synthesis reports be-
fore exporting the hardware accelerators.
All arithmetic operations were described us-
ing the high-level synthesis math library of
AMD®(Advanced Micro Devices Inc., ). The
high-level simulation results were validated at the
functional level by running test benches in C++ and
comparing them with the results of the software
implementation in Matlab®.
3.2.3 Design Verification
Design process include a verification at gate level
simulation, prototyping on FPGA platform including
logic synthesis, place, and route elements. Once the
functional behavior of the SpTFRA was verified, the
options of filters used were analyzed from the per-
spective of hardware resource consumption, synthe-
sizing only those of smaller size. In the system test-
ing task, metrics and resource consumption were eval-
uated at a pre-synthesis level including a compari-
son for the use of digital signal processors (DSP),
block random access memory (BRAM), look-up ta-
bles (LUT), and Flip-Flops (FF) elements required by
each hardware implementation. Such analysis enables
the selection of the best features proposed for the SpT-
FRA, utilizing sparse matrix approximations with the
Modified Compressed Sparse Row format (MCSR) as
proposed by (Hosseinabady and Nunez-Yanez, 2020).
This approach, centered on optimizing hardware
resource usage and verifying time propagation delay
for each case, enables an efficient hardware imple-
mentation of the algorithms. The system’s response
time was verified using Integrated Logic Analyzer
Accelerators from AMD® (Advanced Micro Devices,
) and the available experimental setup.
3.2.4 System Validation
System validation was conducted through functional
evaluation, assessing the force estimation error of
each hardware implementation, and verifying the
real-time response of smaller implementations in
hardware resources and energy consumption, as best
throughput. The design methodology followed herein
compliance with hardware functionality and effi-
ciency criteria, which were the main guides to the fi-
nal implemented solutions.
The presented hardware design approach lever-
ages the generalized matrix–vector multiplication to
optimize hardware resource consumption by replac-
ing dense matrices with approximate sparse matrices.
The last significant contribution of this work was
the analysis and evaluation of vulnerability to tran-
sient faults in sparse matrix hardware accelerators
when implementing force estimation in safety-critical
tactile sensing applications and other fields that rely
on large matrices.
4 EXPERIMENTAL RESULTS
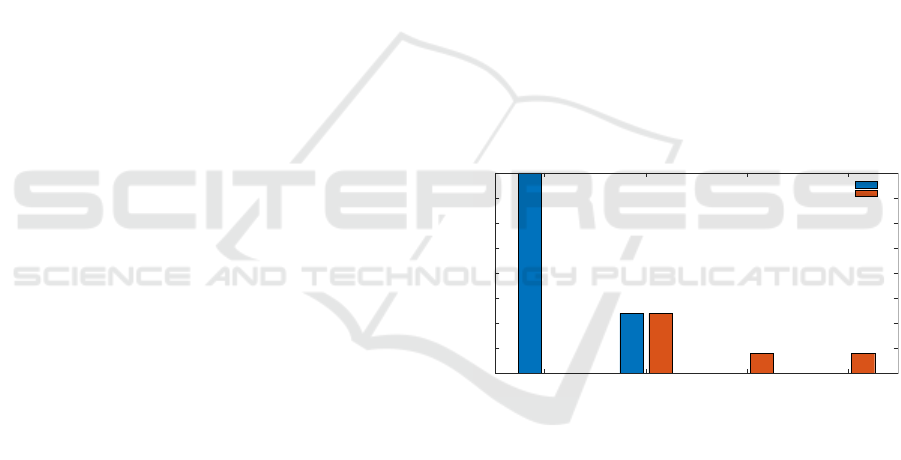
Figure 2 shows the evolution and numerous software
and hardware implementations analyzed for each al-
gorithm as the design process progresses. During
the system specification, 20 software implementa-
tions were analyzed for each sensor, of which 2 cor-
responded to the TFRA evaluation and the remaining
38 were evaluations of different threshold filters pro-
vided in the SpTFRA. For these cases, each software
alternative involved a memorization process of con-
stant matrices in the system memory. Therefore, for
the hardware design stage, only the ten implementa-
tions with the lowest force estimation error calculated
by the software implementations in each case were
described.
System Specification Hardware Design Design verification System Validation
Desing step
0
5
10
15
20
25
30
35
40
Implementations
SW
HW
Figure 2: Hardware design flow proposed for the hardware
implementation.
The high-level synthesis and simulation reporting
tools available in HLS allowed us to select two hard-
ware implementations for each sensor with the best
functionality and efficiency. These implementations
were then taken to the design verification and system
validation levels. The process followed with HLS ver-
ified the reduction in the design effort since changes
in the algorithms at the software level could be con-
sidered with a rapid evaluation of their implications at
the hardware synthesis level.
Figure 3 summarizes the behavior of the prelim-
inary synthesis reports obtained by the Vitis™ HLS
2022 tools in the high-level Synthesis (C Synthesys)
before exporting the hardware accelerators. At this
level, The synthesis report for the TFRA (HW1, HW2
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
528
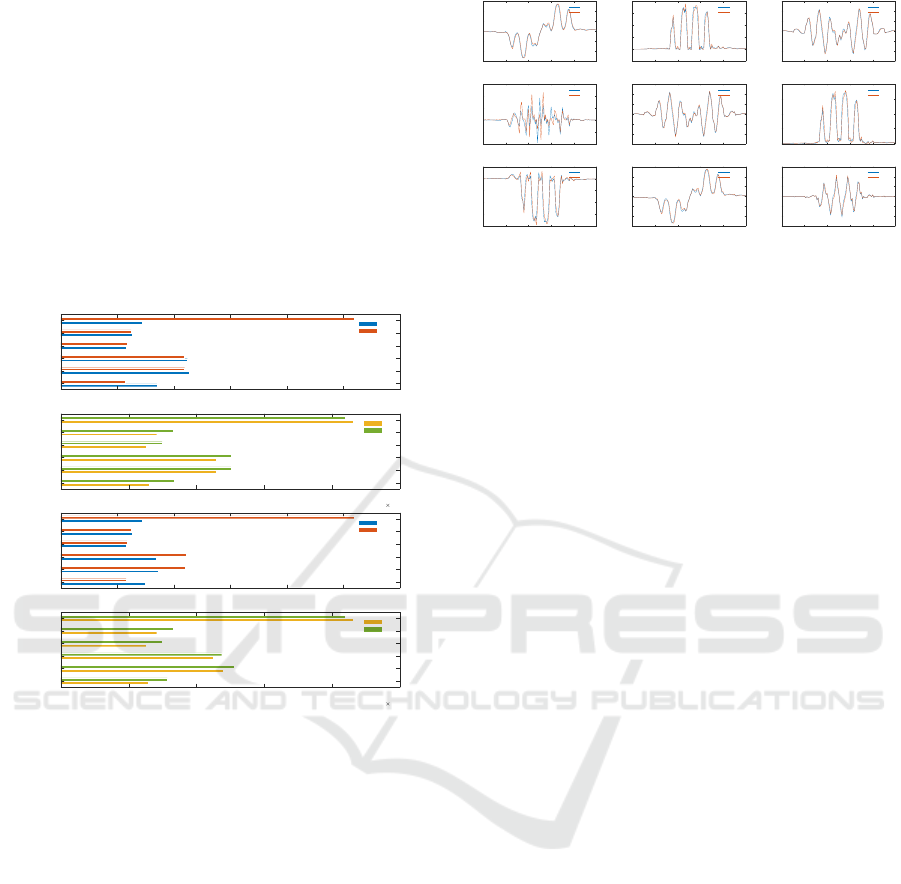
applied in two sensor cases) showed excessive use
of DSP modules for the Zynq Ultrascale ZCU102
FPGA. This means that the synthesis of this algorithm
couldn’t be performed in hardware and that the TFRA
implementation was only done at the functional ver-
ification level in Xilinx’s Vivado. In contrast to the
TFRA, the SpTFRA algorithm was effectively imple-
mented and synthesized in hardware, following the
same design flow for TFRA, thanks to the reduction in
hardware consumption generated by using sparse ma-
trices and data encoding strategies that reduced the
number of operations in sparse matrix-vector multi-
plications.
0 500 1000 1500 2000 2500 3000
Resources
HW
1F3
HW
1F2p50
HW
1F2p30
HW
1F1L50
HW
1F1L40
HW
1
Sensor 1
BRAM
DSP
0 0.5 1 1.5 2 2.5
Resources
10
5
HW
1F3
HW
1F2p50
HW
1F2p30
HW
1F1L50
HW
1F1L40
HW
1
Sensor 1
FF
LUT
0 500 1000 1500 2000 2500 3000
Resources
HW
2F3
HW
2F2p50
HW
2F2p30
HW
2F1L50
HW
2F1L40
HW
2
Sensor 2
BRAM
DSP
0 0.5 1 1.5 2 2.5
Resources
10
5
HW
2F3
HW
2F2p50
HW
2F2p30
HW
2F1L50
HW
2F1L40
HW
2
Sensor 2
FF
LUT
Figure 3: Comparison of hardware consumption for the an-
alyzed implementations
Figure 4 shows a comparison between the high-
level hardware simulation and software implementa-
tions of the SpTFRA for calculating some g
pq
inter-
nal coefficients of the algorithm in one of the contact
cases for Sensor 1. The similarity of the responses in-
dicates that the hardware implementation accurately
computes those coefficients. Some differences can
be explained by the approximations made by the soft-
ware vs. hardware math library.
Table 1 summarizes the efficiency evaluation pa-
rameters for the TFRA and SpTFRA algorithms. The
values considered for the system evaluation were: the
maximum relative error in the estimation of the tan-
gential resultant forces (e
FX
, e
FY
), the normal resul-
tant forces (e
FZ
), the friction coefficient (e
µ
), and the
orientation angle of the tangential forces (e
φ
). These
errors were calculated from the reference values gen-
erated by a Finite Element Analysis (FEA) technique
using Comsol Multiphysics® 6.0 software. The ef-
ficiency metrics considered are also presented in Ta-
0 20 40 60 80 100
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
g10-sw
g10-hw
0 20 40 60 80 100
-0.1
0
0.1
0.2
0.3
0.4
g11-sw
g11-hw
0 20 40 60 80 100
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
g12-sw
g12-hw
0 20 40 60 80 100
-0.02
-0.01
0
0.01
0.02
0.03
g20-sw
g20-hw
0 20 40 60 80 100
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
g21-sw
g21-hw
0 20 40 60 80 100
0
0.1
0.2
0.3
0.4
g22-sw
g22-hw
0 20 40 60 80 100
-0.4
-0.3
-0.2
-0.1
0
0.1
g30-sw
g30-hw
0 20 40 60 80 100
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
g31-sw
g31-hw
0 20 40 60 80 100
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
g32-sw
g32-hw
Figure 4: High-level hardware simulation and software im-
plementations of the SpTFRA for calculating g
pq
coeffi-
cients.
ble 1, which includes latency, power, throughput, and
execution time. Regarding power consumption, for
the case of FPGA-based touch sensing systems, au-
thors as (Mendoza-Pe
˜
naloza and Mu
˜
noz, 2023) report
power consumptions of around 2W for all cases, val-
ues that are higher than those obtained in this work,
which are under 1W. Power consumption results for
TFRA implementations could not be obtained be-
cause these implementations proved physically unim-
plementable due to exceeding the capabilities of the
hardware platform employed. The SpTFRA hardware
implementation stands out for achieving latency met-
rics much lower than those of TFRA.
The response time was determined using a system
clock frequency of 125 MHz. Force estimation for the
SpTFRA implementations was performed in an av-
erage time of 58.68 ms, which is in the same range
as other works reporting real-time operation for force
estimation, such as (Xu et al., 2024) (33 ms), and
(Alameh et al., 2020) (300 ms). However, all these
response times were obtained using software imple-
mentations running on PC workstations. Some au-
thors report response times and resource consumption
for an 8 ×8 sensor matrix size (Seminara et al., 2015),
while others report resource consumption but do not
perform force reconstruction (Mendoza-Pe
˜
naloza and
Mu
˜
noz, 2023). All of this makes it difficult to thor-
oughly compare these works and the results obtained
in this work.
5 CONCLUSIONS
This work presents the design and implementation
of two efficient hardware architectures for recon-
structing triaxial contact forces in tactile data decod-
ing. Developed architectures are implemented on an
FPGA platform using a high-level hardware design
approach, which enables to get a significant reduction
in the design effort, speeds up the system validation
High-Level Synthesis of an Efficient Hardware Implementation for a Smart Tactile Sensing System
529
Table 1: Efficiency performance parameters of the TFRA and SpTFRA algorithms and their hardware implementations.
Parameters Sensor and Algorithms
TFRA SpTFRA TFRA SpTFRA
SW Ref. SW
1
SW
1F1L40
SW
1F3
SW
2
SW
2F2p50
SW
2F3
e
FX
5.94 7.48 7.52 7.84 6.11 6.11
e
FY
3.44 4.87 4.23 5.44 5.9 5.89
e
FZ
10.93 13.63 13.66 2.69 3.67 3.66
e
µ
9.41 12.17 14.31 4.46 12.97 14.92
e
φ
1.64 1.64 1.64 3.16 3.16 3.16
HW Ref. HW
1
HW
1F1L40
HW
1F3
HW
2
HW
2F2p50
HW
2F3
e
FX
5.95 7.45 7.7 6.12 5.51 6.12
e
FY
3.45 4.79 4.17 5.9 5.92 5.91
e
FZ
11.87 10.83 12.57 3.66 3.37 3.67
e
µ
9.42 12.15 14.67 8.97 9.01 8.99
e
Φ
1.93 1.93 1.93 2.2 2.2 2.2
Power [W] 3992.9** 0.871 0.894 3992.9** 0.953 0.983
Latency (CLK @ 125 MHz)[ms] 12 5.4 5.9 12 6.4 6.7
Throughput [MBps] 65.89 59.96 62.72 55.32
Execution time [ms] 51.27 51.49 58.52 58.68
∗∗ Physically unimplementable.
process, reduces data storage requirements, the num-
ber of processing elements, and the energy consump-
tion of the whole system.
This approach is generalizable, which means that
it can be replicated for algorithms with similar restric-
tions on the use of resources, energy consumption,
performance, latency, and response time. Similarly,
the design method is applicable to other fields of tac-
tile detection, applications, and components for ana-
lytical models and data-based hardware applications.
Integrated circuit design methodology allowed us
to find an efficient hardware implementation for con-
tact force reconstruction. The process was guided by
a rigorous review of the challenge transduction tech-
nology, the complexity of the contact force recon-
struction model, and the implementation of the con-
tact force reconstruction system, as well as by an eval-
uation of the algorithm’s functionality and hardware
efficiency.
Future works could include exploring alternatives
for data access, addressing, and reuse for TFRA and
SpTFRA implementations that take advantage of the
on-chip memory availability of FPGAs and other em-
bedded systems to overcome the bottleneck caused by
poor memory access times.
ACKNOWLEDGEMENTS
This research has been partially supported by the
projects UPTC VIE SGI 3940.
REFERENCES
Advanced Micro Devices, I. Integrated Logic Analyzer
(ILA).
Advanced Micro Devices Inc. HLS Math Library, Vitis
High-Level Synthesis User Guide (UG1399), Reader
AMD Technical Information Portal.
Alameh, M., Abbass, Y., Ibrahim, A., and Valle, M. (2020).
Smart tactile sensing systems based on embedded cnn
implementations. Micromachines, 11.
Alameh, M., Ibrahim, A., Valle, M., and Moser, G. (2019).
Dcnn for tactile sensory data classification based
on transfer learning. In 2019 15th Conference on
Ph.D Research in Microelectronics and Electronics
(PRIME), pages 237–240.
Dahiya, R. S., Metta, G., Valle, M., and Sandini, G. (2010).
Tactile sensing—from humans to humanoids. IEEE
Transactions on Robotics, 26:1–20.
Fleer, S., Moringen, A., Klatzky, R. L., and Ritter, H.
(2020). Learning efficient haptic shape exploration
with a rigid tactile sensor array. PLoS ONE, 15.
Gardezi, S. E. I., Aziz, F., Javed, S., Younis, C. J., Alam,
M., and Massoud, Y. (2019). Design and vlsi imple-
mentation of csd based da architecture for 5/3 dwt. In
2019 16th International Bhurban Conference on Ap-
plied Sciences and Technology (IBCAST), pages 548–
552.
Ham, J., Huh, T. M., Kim, J., Kim, J.-O., Park, S., Cutkosky,
M. R., and Bao, Z. (2023). Porous Dielectric Elas-
tomer Based Flexible Multiaxial Tactile Sensor for
Dexterous Robotic or Prosthetic Hands. Advanced
Materials Technologies, 8(3):2200903.
Han, C., Cao, Z., Hu, Y., Zhang, Z., Li, C., Wang, Z. L., and
Wu, Z. (2024). Flexible Tactile Sensors for 3D Force
Detection. Nano Letters, 24(17):5277–5283.
Hosseinabadi, A. H. H., Black, D. G., and Salcudean, S. E.
(2021). Ultra low-noise fpga-based six-axis optical
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
530

force–torque sensor: Hardware and software. IEEE
Transactions on Industrial Electronics, 68:10207–
10217.
Hosseinabady, M. and Nunez-Yanez, J. L. (2020). A
Streaming Dataflow Engine for Sparse Matrix-Vector
Multiplication Using High-Level Synthesis. IEEE
Transactions on Computer-Aided Design of Integrated
Circuits and Systems, 39(6):1272–1285.
Ibrahim, A., Osta, M., Alameh, M., Saleh, M., Chible, H.,
and Valle, M. (2018a). Approximate computing meth-
ods for embedded machine learning. In 2018 25th
IEEE International Conference on Electronics, Cir-
cuits and Systems (ICECS), pages 845–848.
Ibrahim, A., Pinna, L., and Valle, M. (2018b). Experimental
characterization of dedicated front-end electronics for
piezoelectric tactile sensing arrays. INTEGRATION-
THE VLSI JOURNAL, 63:266–272.
Jang, H., Bae, J., and Haninger, K. (2024). Soft finger grasp
force and contact state estimation from tactile sensors.
Kerner, S., Krugh, M., and Mears, L. (2022). Wear-
able shear and normal force sensing glove develop-
ment for real-time feedback on assembly line pro-
cesses. JOURNAL OF MANUFACTURING SYS-
TEMS, 64:668–675.
Lifa, A., Eles, P., and Peng, Z. (2015). On-the-fly en-
ergy minimization for multi-mode real-time systems
on heterogeneous platforms. Institute of Electrical and
Electronics Engineers Inc. Cited By :1Export Date: 10
March 2020.
Ma, D., Donlon, E., Dong, S., and Rodriguez, A. (2019).
Dense tactile force estimation using gelslim and in-
verse fem. In 2019 International Conference on
Robotics and Automation, ICRA 2019, volume 2019-
May, pages 5418–5424. Institute of Electrical and
Electronics Engineers Inc.
Magno, M., Ibrahim, A., Pullini, A., Valle, M., and Benini,
L. (2017). Energy efficient system for tactile data de-
coding using an ultra-low power parallel platform. In
2017 New Generation of CAS (NGCAS), pages 17–20.
Magno, M., Ibrahim, A., Pullini, A., Valle, M., and Benini,
L. (2018). An energy efficient e-skin embedded sys-
tem for real-time tactile data decoding. JOURNAL OF
LOW POWER ELECTRONICS, 14:101–109.
Mendoza-Pe
˜
naloza, J. and Mu
˜
noz, D. M. (2023). Hard-
ware implementation of a sliding detection algorithm
for robotic hands using force sensors. In 2023 36th
SBC/SBMicro/IEEE/ACM Symposium on Integrated
Circuits and Systems Design (SBCCI), pages 1–6.
Mohammadi, A., Kneale-Roby, H., Sadrafshari, S., Bienek,
M., Betts, J., and Shokrani, A. (2025). Hardware
implementation of convolutional neural network for
high-precision machining at the sensor edge. In 2025
IEEE International Symposium on Circuits and Sys-
tems (ISCAS), pages 1–5.
Pinto-Salamanca, M. L., Castellanos-Ramos, J., P
´
erez-
Holgu
´
ın, W. J., and Hidalgo-L
´
opez, J. A. (2023). An
estimation of triaxial forces from normal stress tactile
sensor arrays. Mechatronics, 96:103070.
Pinto-Salamanca, M.-L., P
´
erez-Holgu
´
ın, W.-J., and
Hidalgo-L
´
opez, J. A. (2024). Hardware Implementa-
tion for Triaxial Contact-Force Estimation from Stress
Tactile Sensor Arrays: An Efficient Design Approach.
Sensors, 24(23).
Plusquellic, J. (2017). The nature of hw/sw ii. hw/sw code-
sign w/ fpgas.
Racordon, D. and Buchs, D. (2016). Verifying multi-
core schedulability with data decision diagrams.
Cited By :1Export Date: 10 March 2020Correspon-
dence Address: Racordon, D.; Centre Universi-
taire d’Informatique, University of GenevaSwitzer-
land; email: dimitri.racordon@unige.ch.
Schaumont, P. R. (2013). A practical introduction to hard-
ware/software codesign. Springer US.
Schenck, W., Horst, M., Tiedemann, T., Gaulik, S., and
M
¨
oller, R. (2017). Comparing parallel hardware ar-
chitectures for visually guided robot navigation. Con-
currency Computation, 29.
Seminara, L., Capurro, M., and Valle, M. (2015). Tactile
data processing method for the reconstruction of con-
tact force distributions. MECHATRONICS, 27:28–37.
Skalicky, S. et al. (2013). High level synthesis: Where are
we? A case study on matrix multiplication. In 2013
Int. Conf. on Reconfigurable Computing and FPGAs
(ReConFig), pages 1–7.
Stallings, W. (2010). Computer Organization and Architec-
ture: Designing for Performance. Prentice Hall, 8th
edition.
Wasko, W., Albini, A., Maiolino, P., Mastrogiovanni, F.,
and Cannata, G. (2019). Contact Modelling and Tac-
tile Data Processing for Robot Skins. SENSORS,
19(4).
Xia, Y., Meng, Y., Xiang, S., Wang, J., and Yang, C. (2023).
An efficient hardware implementation of dilated con-
volution using a novel channel-equivalent decomposi-
tion method. In 2023 IEEE International Conference
on Integrated Circuits, Technologies and Applications
(ICTA), pages 172–173.
Xu, D., Hong, W., Hu, B., Zhang, T., Chen, D., Yan, Z.,
Yao, X., Zhang, X., Zhao, Y., Sun, T., Zhang, C.,
Pan, M., Ruan, X., Yan, R., Wang, J., and Guo, X.
(2024). River valley-inspired, high-sensitivity, and
rapid-response capacitive three-dimensional force tac-
tile sensor based on u-shaped groove structure. Smart
Materials and Structures, 33:35006.
Zhao, C., Liu, J., and Ma, D. (2025). ifem2.0: Dense 3-d
contact force field reconstruction and assessment for
vision-based tactile sensors. IEEE Transactions on
Robotics, 41:289–305.
Zhu, Z., Zhang, J., Zhao, J., Cao, J., Zhao, D., Jia, G.,
and Meng, Q. (2019). A hardware and software task-
scheduling framework based on cpu+fpga heteroge-
neous architecture in edge computing. IEEE Access,
7:148975–148988.
High-Level Synthesis of an Efficient Hardware Implementation for a Smart Tactile Sensing System
531
