
Fire-Resistant Wall-Climbing UAV for Victim Detection in Urban
Search and Rescue Missions
Vedant Hambire
*
, Harsh Yadav, Dipshikha Hazari
and Satyam Singh
National Institute of Technology, Agartala, India
Keywords: Wall-Climbing UAV, Fireproof Drone, Urban Search and Rescue (USAR), YOLOv8, Optical Flow,
MediaPipe, Tilt-Rotor Mechanism, CFD, FEA, ROS, Alive Human Detection.
Abstract: Unmanned Aerial Vehicles (UAVs) have become invaluable in high-stakes search and rescue operations in
fire-prone and fire-damaged environments due to their capabilities in victim locating and situation analysis.
This paper describes the design, simulation, and realization of a fire-resistant, wall-climbing UAV with a
human alive detection system powered by AI. The UAV includes a custom-designed H-frame made out of
PLA which is thrust vectoring EDFs attached to a tilt-rotor system permitting vertical hovering and traversing.
Structural and aerodynamic aspects were verified with FEA and CFD simulations performed on SimScale.
To allow for autonomous victim detection, the UAV system includes a real-time human detector based on
YOLOv8 with and optical flow and MediaPipe-based eye tracking to classify people as conscious,
unconscious, dead, or blocked out. The UAV's mission computer, which comprises a Raspberry Pi with ROS,
records would-detect status and location, and outputs tagged geo-coordinates for mission planning in real-
time. Simulation and ground testing would confirm the system’s viability in heat-intensive, debris-laden
environments, advancing the development of autonomous aerial platforms for disaster response, firefighting,
and urban search and rescue (USAR) operations.
1 INTRODUCTION
Unmanned Aerial Vehicles (UAVs) have emerged as
crucial instruments in a variety of fields over the past
ten years, such as search and rescue, surveillance, and
disaster response (Mulgaonkar et al., 2016), (Dudek
& Jenkin, 2010). UAVs that can withstand high-risk
situations like industrial settings, collapsed
structures, and fire-prone areas are becoming more
and more necessary for these applications.
Despite their proficiency in aerial reconnaissance,
traditional multirotor platforms are constrained by
their poor wall traversal capabilities, heat sensitivity,
and incapacity to identify incapacitated victims
(Murphy, 2004). Researchers have developed
fireproof UAVs with thermal insulation layers, such
as Nomex, ceramic coatings, or silica aerogels, to get
around these limitations. These layers protect
electronic systems from high ambient temperatures
(Zhang et al., 2021), (Lee et al., 2020), (Tan et al.,
2021). Wall-climbing UAVs that draw inspiration
from biological systems like geckos, insects, and bats
have been developed as a result of parallel
*
Corresponding author: vedanthambire568@email.com
developments in surface adhesion and locomotion
(Kim et al., 2018), (Li et al., 2017). These systems
scale vertical or inverted surfaces using suction
mechanisms (Sun et al., 2021), electro-adhesion
(Spenko et al., 2012), or magnet-based gripping
(Wang et al., 2021). Most are less effective in multi-
hazard environments because they lack integration
with fire survivability or robust perception systems,
despite being effective in confined spaces.
UAVs can now accurately identify human targets
on their own thanks to recent advancements in real-
time computer vision, especially in object detection
using deep learning models like YOLO (You Only
Look Once) (Redmon et al., 2018). But YOLO by
itself is unable to distinguish between people who are
conscious, unconscious, or deceased. In order to
close this gap, scientists have integrated optical flow
to identify subtle thoracic movements that are
suggestive of breathing (Akhloufi et al., 2020),
(Sharma & Mahapatra, 2021). In our work, we
evaluate breathing using the Farneback method on
grayscale frame differences, which enables the
system to classify victims into subtle states.
Hambire, V., Yadav, H., Hazari, D. and Singh, S.
Fire-Resistant Wall-Climbing UAV for Victim Detection in Urban Search and Rescue Missions.
DOI: 10.5220/0013838500003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 417-424
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
417

We use MediaPipe FaceMesh, a landmark
detection framework created by Google, to further
evaluate consciousness. This framework allows for
accurate measurement of Eye Aspect Ratio (EAR),
which infers blink rates and eye closure (Zhang et al.,
2020). A complete "alive detection" pipeline that can
classify data in real time into four different states—
Alive & Conscious, Alive but Unconscious, Dead,
and Obstructed/Not Visible—is made possible by the
combination of YOLOv8, optical flow, and
MediaPipe. This system would be powered by a small
Raspberry Pi 4B onboard computer that runs ROS
and connects via MAVLink to a flight controller that
is compatible with Pixhawk. The UAV would be
equipped with an MTF-01P optical flow sensor for
indoor navigation and Intel RealSense cameras for
depth and odometry, making it ready for both
controlled and unpredictably changing field
conditions.
To ensure stable control during wall contact,
transition, and flight, we would implement a Model
Predictive Control (MPC) architecture. This control
strategy adapts across three behavioural modes—
sticking, tilting, and climbing—with specific
optimisations for wheel torque, gear actuation, and
thrust modulation. The UAV’s dynamic model is
simulated using ROS2 and Gazebo, ensuring that the
control algorithm respects physical constraints and
delivers energy-efficient performance.
Our work therefore unifies fireproofing, surface
adhesion, advanced vision-based perception, and
predictive control into a single hybrid UAV platform,
addressing multiple gaps in current USAR (Urban
Search and Rescue) technologies. The integration of
resilient materials, sensor-rich electronics, and deep
learning allows this system to operate autonomously
in highly dynamic and hazardous environments.
2 DESIGN STRATEGY
The proposed UAV is inspired by the tilt-rotor wall-
climbing concept introduced by Myeong and Myung
(Myeong & Myung, 2020), where thrust vectoring
and surface traction enable stable vertical attachment.
This design incorporates fire-resistant structural
elements and an AI-based alive detection system
tailored for disaster zones. The UAV uses a modified
H-frame made of PLA and carbon fibre rods for
optimal strength-to-weight performance. Developed
in SolidWorks and analysed in ANSYS, the frame
withstands perching and wall-impact loads. Four
EDFs (two front, two rear) are mounted on servo-
actuated tilting arms, enabling transitions between
horizontal flight and vertical climbing. MG995 servos
drive a 1:1 gear system for smooth tilt control, with a
selected angle of 59.2° optimised for wall adhesion
(friction coefficient = 0.5). Passive wheels assist
vertical mobility post-attachment. CFD simulations
in SimScale confirm stable aerodynamics near walls;
FEA validates joint and strut integrity. For victim
detection, a Raspberry Pi runs YOLOv8 with optical
flow analysis to monitor thoracic motion,
distinguishing live victims. On detection, GPS
coordinates are transmitted to responders. This builds
on approaches by Patel et al. (Patel et al., 2020) and
Li et al. (Li et al., 2021), highlighting deep learning's
role in disaster-zone reconnaissance. Upon detection,
the drone transmits GPS coordinates to responders.
This builds on approaches by Patel et al. (Patel et al.,
2020) and Li et al. (Li et al., 2021), who demonstrated
deep learning’s value in disaster-zone
reconnaissance.
Figure 1: Final SolidWorks model of the wall-climbing
UAV; isometric view of the UAV showing the tilt-rotor H-
frame layout with EDFs and passive wall-contact wheels;
Front view illustrating vertical alignment of ducted fans and
the symmetric gear-driven shaft for tilt control.
2.1
Drone
Frame
The UAV uses a compact H-frame designed in
SolidWorks, optimised for structural rigidity and
balanced load distribution. The main frame is 3D
printed in PLA and laterally reinforced with carbon
fibre rods supporting the rotating EDF modules. A
165 mm-wide central platform includes precise
cutouts for mounting the servo-tilt system,
NxtPX4V2 flight controller (sandwiched for
vibration damping), Raspberry Pi, battery, and
passive wheels aiding wall climbing and stability.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
418

Figure 2: SolidWorks sketch of the PLA frame with key
dimensions and cut-outs for mounting components. Top
view of the UAV assembly showing component placement
and symmetric EDF-wheel layout.
2.2 Tilt Rotor Mechanism
The UAV employs four EDF motors (two front, two
rear) housed in custom PLA cases that function as
both enclosures and supports for the wall-climbing
mechanism. These cases are mounted on a 16 mm
carbon fibre shaft driven by a 1:1 spur gear system
coupled to an MG995 high-torque servo, enabling
symmetric tilting of the EDFs. Following the tilt-rotor
approach of Myeong and Myung (Myeong & Myung,
2020), this design allows smooth transitions between
horizontal flight and wall adhesion. Each EDF case
also integrates a secondary mount for wall-contact
wheels, redesigned with ball bearings for low-friction
movement along vertical surfaces. The wheels,
fabricated from ABS for impact resistance and low
weight, support wall climbing, while the required tilt
angle (θ) is determined using equation (1).
tan(θ) = mg/μT (1)
Where m is UAV mass, g is gravity, T is thrust per
motor, and μ is the friction coefficient. For a UAV
mass of 2 kg, EDF thrust of 1.25 kgf per unit, and μ =
0.5, the calculated optimal tilt angle is approximately
59.2°, aligning with the previous research findings
(Myeong & Myung, 2020). This mechanism allows
the UAV to redirect thrust perpendicularly during
perching and revert for free flight, enabling hybrid
aerial-wall locomotion.
Figure 3: Top view of the servo-driven spur gear
mechanism enabling symmetric EDF tilt via a carbon fibre
shaft. Isometric view of the tilt-rotor gear assembly
integrated into the UAV frame.
2.3 Electronics
The UAV is equipped with electronics tailored for
high-thrust propulsion, autonomous wall-climbing,
and onboard human detection. At its core is the
NxtPX4V2 flight controller, handling motor control,
sensor fusion, and stabilisation. Propulsion is
delivered via four Powerfun 70 mm EDF motors
(2.2 kgf thrust each), driven by a Hobbywing XRotor
G2 4-in-1 65A ESC with 6S input and DShot1200
protocol for low-latency response. A Pro-Range
13000mAh 6S 25C LiPo battery (1.56 kg) powers the
system, offering ~8.5 minutes of flight and a 1.67
thrust-to-weight ratio, enabling stable lift and
climbing. Power is split via XT90 connectors, with
two UBECs (5V and 12V) providing isolated supply
to MG995 servos (for tilt-rotor actuation) and the
onboard compute unit.
Flight Time (minutes) = ( C × V × η / P ) × 60
Using the values:
(Battery Capacity) C = 13 Ah, (Battery Voltage) V =
22.2 V, (Discharge Efficiency) η = 0.85, (Average
Power Consumption) P = 1450 W
Flight Time ≈ 8.5 minutes
This estimated value is based on moderate hover and
cruise conditions. Final validation will be done using
telemetry logs and stopwatch measurements during
prototype testing. For perception and positioning, the
UAV uses the MTF-01P optical flow and range
sensor, NEO-M8N GPS with compass, and SiK
Telemetry Radio V3 for long-range communication.
Two Intel RealSense cameras D435i (depth) and
T265 (odometry) enable indoor navigation and visual
detection. These feed into a Raspberry Pi 4B running
ROS for onboard AI inference, including a YOLOv5-
tiny model for real-time human detection and optical
flow-based breathing analysis. The Pi communicates
with the flight controller via MAVLink for decision-
making. The system is manually operable through a
TX16S Mark II radio with fail-safe support via SiK
link.
To meet power and endurance requirements
within a 1.5 kg battery limit, a Tattu 6S 12000 mAh
25C LiPo battery was selected. Delivering 22.2 V
nominal voltage and up to 300 A continuous
discharge, it comfortably supports the combined
260 A draw of four EDFs rated at 65 A each.
Weighing ~1.43 kg, the battery keeps the UAV’s all-
up weight (AUW) at 4.5 kg, as confirmed by the
integrated mass breakdown. Flight time is estimated
at ~8.5 minutes under high-load conditions. The four
Fire-Resistant Wall-Climbing UAV for Victim Detection in Urban Search and Rescue Missions
419
EDFs generate a total of 8.8 kgf static thrust. At a 60°
tilt, the vertical thrust component reaches ~7.5 kg,
yielding a thrust-to-weight ratio of 1.67, which
ensures stable vertical lift and wall-climbing. The
horizontal thrust (~4.6 kg) supports wall traction and
transition control.
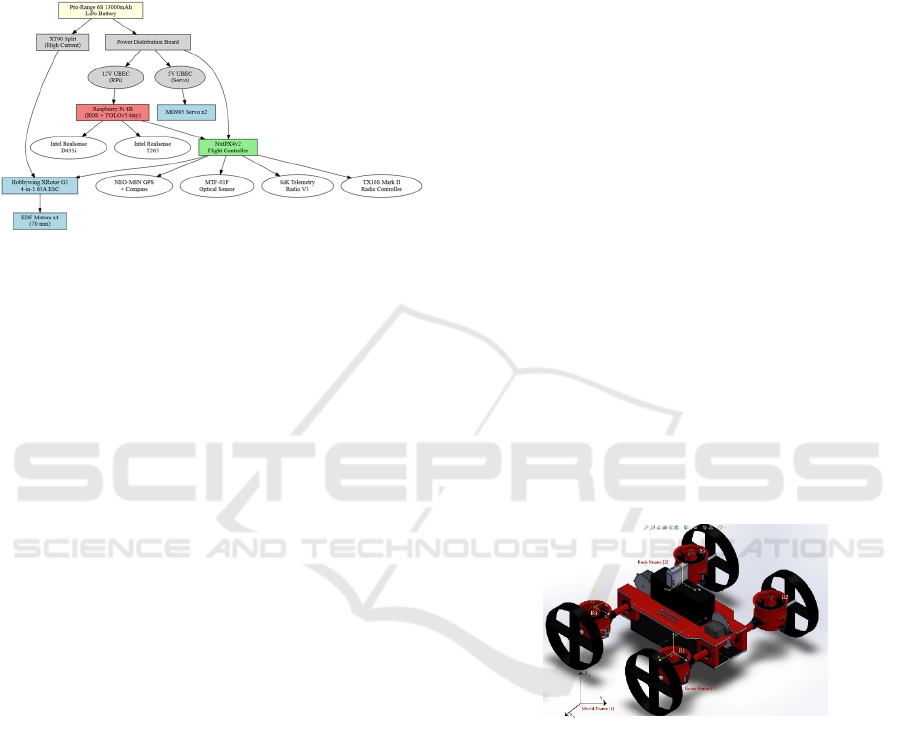
Figure 4: Power and control architecture of the UAV,
illustrating the integration of the propulsion, perception,
computation, and communication subsystems
2.4 Fireproofing
To enhance survivability in fire-prone environments,
the UAV’s base frame is 3D printed in lightweight
PLA, ideal for rapid prototyping. However, due to
PLA’s low thermal resistance (~60 °C), it is coated
with Nomex a flame-retardant aramid fibre known for
high thermal stability and low weight. Widely used in
aerospace and firefighting gear, Nomex withstands
temperatures up to 370 °C without melting or
dripping, while maintaining structural integrity. With
a density of just 1.38 g/cm³, it adds minimal weight to
the drone.
2.5 Mathematical Model
The system is defined using three coordinate frames:
the world frame, body frame, and individual rotor
frames. The world frame (Xw, Yw, Zw) is a fixed
inertial reference, while the body frame (Xb, Yb, Zb)
is centered at the UAV’s center of gravity and used
for dynamic modelling and control. Each rotor (R1–
R4) has a local frame initially aligned with the body
frame but can rotate around the yaw axis and tilt as
actuated. The UAV uses four Electric Ducted Fan
(EDF) rotors, each capable of dual-axis tilting (pitch
and roll). Two servomotors per side enable paired
tilting: R1 with R4, and R2 with R3.
Thrust Vector in Rotor Frame
𝑇
⃗
=
0
0
𝑇
(Thrust acts along the rotor's local Z-axis)
Rotation Due to Dual-Axis Tilt
𝑅
=𝑅
𝛼 ⋅ 𝑅
𝛽
𝑅
𝛼=
10 0
0cos 𝛼−sin 𝛼
0sin 𝛼cos 𝛼
𝑅
𝛽=
cos 𝛽 0 sin 𝛽
010
−sin 𝛽 0 cos 𝛽
𝑇
⃗
=𝑅
𝛼 ⋅ 𝑅
𝛽⋅ 𝑇
⃗
Rotor Orientation w.r.t. Body Frame (Yaw Offset):
𝑅
𝜓
=
cos 𝜓
−sin 𝜓
0
sin 𝜓
cos 𝜓
0
001
Thrust in Body Frame:
𝑇
⃗
body
=𝑅
𝜓
⋅𝑅
𝛼 ⋅ 𝑅
𝛽⋅
0
0
𝑇
UAV Orientation in World Frame (Euler ZYX)
𝑅
=𝑅
𝜓 ⋅ 𝑅
𝜃⋅ 𝑅
𝜙
The rotation matrix from the body frame to the world
frame using the ZYX Euler angle convention (yaw 𝜓,
pitch 𝜃, roll 𝜙 ) is given by:
𝑅
world
body
=𝑅
𝜓
⋅𝑅
𝜃
⋅𝑅
𝜙
𝑅=
𝑐
𝑐
𝑐
𝑠
𝑠
−𝑠
𝑐
𝑐
𝑠
𝑐
+𝑠
𝑠
𝑠
𝑐
𝑠
𝑠
𝑠
+𝑐
𝑐
𝑠
𝑠
𝑐
−𝑐
𝑠
−𝑠
𝑐
𝑠
𝑐
𝑐
Figure 5: Reference frames of the UAV. The world frame
(Xw,Yw,Zw) is a fixed inertial frame. The body frame
(Xb,Yb,Zb) is attached to the UAV’s center of gravity
(CG).
Final Thrust Vector in World Frame is:
𝑇
⃗
world
=𝑅
world
body
⋅𝑇
⃗
body
𝑇
⃗
world
=𝑅
𝜓 ⋅ 𝑅
𝜃 ⋅ 𝑅
𝜙⋅ 𝑅
𝜓
⋅𝑅
𝛼 ⋅ 𝑅
𝛽⋅
0
0
𝑇
Where:
𝜓
: Yaw position of the rotor relative to the UAV
body, 𝛼,𝛽 : Rotor tilt angles (dual-axis), 𝑇 : Thrust
magnitude (in rotor frame)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
420
3 ANALYSIS
To ensure structural robustness, aerodynamic
efficiency, and fire resilience, the UAV was
simulated using SimScale. The frame was modelled
with Polylactic Acid (PLA), while 16 mm carbon
fibre rods reinforced the tilt mechanism and motor
shafts. Structural integrity was assessed via Finite
Element Analysis (FEA) to identify stress
concentrations under load. Computational Fluid
Dynamics (CFD) simulations examined airflow
during flight and wall climbing. The results informed
key design choices.
3.1 Frame Analysis
To evaluate the structural integrity of the UAV frame
under operational loading conditions, a static
structural analysis was performed using the Finite
Element Analysis (FEA) module in SimScale. The
frame model, derived from the SolidWorks assembly,
consists of PLA. A fine mesh was applied with
maximum edge length of 0.005 m and minimum of
0.001 m, generating approximately 944,000 nodes for
accurate stress resolution.
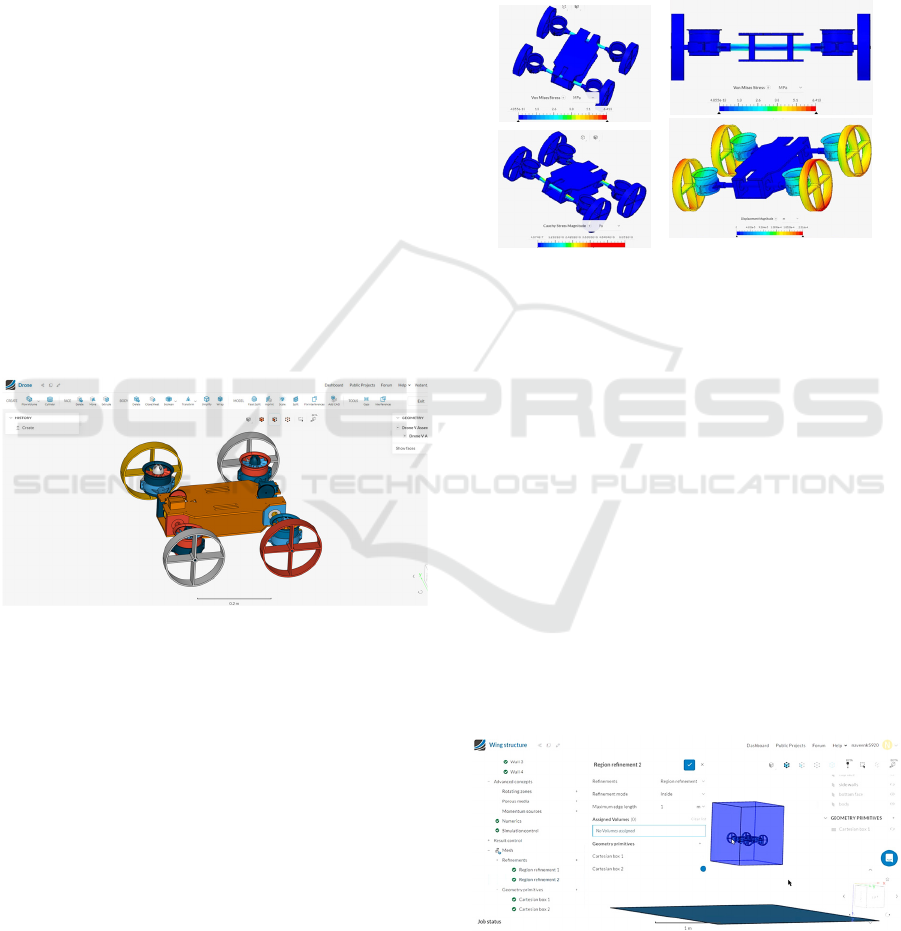
Figure 6: Meshing setup for structural FEA in SimScale.
The material properties used for PLA were:
Young’s Modulus of 3.5 GPa, Poisson’s ratio of 0.36,
and density of 1.24 g/cm³, while carbon fibre rods
were assumed to be rigid due to their high stiffness.
Boundary conditions included fixed supports at the
motor mount joints and load application points
corresponding to the EDF thrust force. A gravity
vector of 9.81 m/s² was applied globally to simulate
self-weight. Contacts between components were
defined as bonded, and the analysis assumes linear
elastic behavior with no material plasticity.
The simulation results revealed that the maximum
von Mises stress occurred at the junctions of the
carbon fibre rods and the PLA plates, especially
around the motor mount zones, with a peak stress of
approximately 48.3 MPa, which is well below PLA’s
typical yield strength (~60 MPa), ensuring a safe
stress margin. The displacement contour showed a
maximum deflection of around 1.83 mm. The Cauchy
stress distribution confirmed that stresses were
concentrated around bolt holes and load-bearing
corners, validating the structural importance of
reinforcement via carbon fibre rods. The factor of
safety was maintained above 1.25 throughout critical
regions.
Figure 7: FEA results showing von Mises stress
distribution, stress concentration near carbon fibre shafts,
Cauchy stress zones around load paths, and total
displacement.
3.2 CFD
Analysis
To assess the aerodynamic performance of the UAV
during both horizontal flight and inclined wall-
climbing phases, a steady-state incompressible
turbulent flow simulation was performed using the k-
omega SST model in SimScale. An inlet velocity of
15 m/s was specified at the front face, while the outlet
was set to zero relative pressure, replicating realistic
cruise conditions. All solid surfaces were treated as
no-slip walls, and the far-field boundaries were
defined with slip conditions. The mesh comprised
over 3.2 million cells, ensuring sufficient resolution
for boundary layer development and wake
interaction.
Figure 8: CFD domain setup in SimScale with refined mesh
regions enclosing the UAV to capture detailed boundary
layer behavior and wake dynamics under 15 m/s inlet flow.
Fire-Resistant Wall-Climbing UAV for Victim Detection in Urban Search and Rescue Missions
421
Viscous forces along the X-axis peaked at ~0.6 N,
reflecting aerodynamic drag opposing forward
motion, before stabilising in steady flow. Lateral and
vertical viscous forces were negligible, supporting
directional stability. Pressure moments were
strongest about the Y-axis (~1.2 N·m), indicating
possible yaw imbalance from asymmetric flow near
the EDF ducts, while X and Z-axis moments
remained negligible, confirming pitch–roll stability.
Porous moment analysis showed consistent Z-axis
resistance (~2 units), highlighting the need for yaw
compensation. Pressure forces were dominated by a
thrust-aligned X-axis component (~5 units), with
minimal fluctuations elsewhere.
Figure 9: Time evolution plots of viscous and pressure
forces and moments from CFD simulation.
4 ALIVE DETECTION SYSTEM
In the domain of Urban Search and Rescue (USAR),
the ability to identify the presence and status of
human victims in obstructed or hazardous
environments remains a critical challenge. Past
approaches, as detailed in studies such as Ingle &
Chunekar (Ingle & Chunekar, 2016) and Kalaboina et
al. (Kalaboina et al., 2018), have relied on ultrasonic,
PIR, and low-resolution camera systems for motion
and heat-based human detection.
Traditional sensing methods struggle with static
or unconscious individuals and are prone to
environmental noise. To overcome this, we
implemented a computer vision-based alive detection
pipeline, simulated on a MacBook Air using its
webcam. The system integrates three modules: (i)
YOLOv8 for person detection, (ii) MediaPipe
FaceMesh to assess consciousness via Eye Aspect
Ratio (EAR), and (iii) Farneback optical flow to
detect breathing through pixel-level thoracic motion
over a temporal buffer. Each subject is classified as
Alive and Conscious (eyes open, breathing), Alive
and Unconscious (eyes closed, breathing), Dead (no
motion or eye activity), or Obstructed/Not Visible.
Outputs include timestamped detection logs, GPS
coordinates (simulated), and status saved in JSON
format for integration with geo-tagged rescue
interfaces.
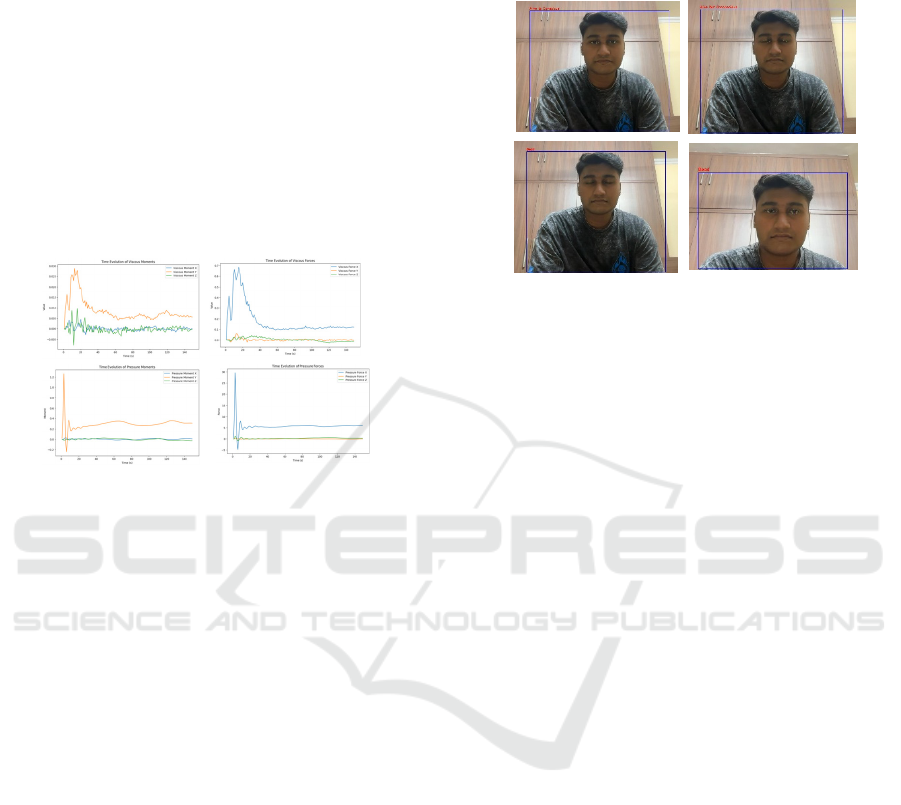
Figure 10: Output states from the simulated alive detection
system showing classification into "Alive & Conscious",
"Alive but Unconscious", and "Dead" based on eye and
breathing activity.
We propose embedding the detection pipeline into the
wall-climbing UAV using Intel RealSense D435i
(depth/obstacle detection), RealSense T265 (pose
estimation), and an MTF-01P optical flow sensor,
managed through a Raspberry Pi running ROS. The
alive_detector.py node will publish real-time human
status, confidence, and obstruction flags, with depth
discontinuity aiding occlusion detection when YOLO
fails.
5 CONTROL SYSTEM
Model Predictive Control (MPC) governs the UAV’s
behaviour across three stages: sticking, tilting, and
thrust-based climbing. In the sticking phase, MPC
controls wheel torque to ensure zero wall-plane
velocity. During tilting, it regulates EDF gear rotation
for smooth, constrained motion. In the thrust phase,
MPC coordinates EDF thrust and wheel torque to
stabilise climbing while maintaining roll, pitch, and
tilt limits. The UAV model, built using URDF/Xacro,
includes structural and inertial details, focusing on
EDF and tilt joints. The MPC state vector includes
position, velocity, orientation, tilt angle, and thrust,
with inputs as thrust vectors and torques. Stage-
specific cost functions and constraints (e.g., torque
bounds, joint limits) ensure energy-efficient, stable
tracking.
For perception, the UAV uses an Intel RealSense
camera indoors to capture RGB-depth data for alive
detection via optical flow and pose estimation
through odometry. Outdoors, GPS is used for
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
422
mapping victim locations, enabling robust operation
across environments. To validate the control
framework, initial testing was conducted on a
standard quadcopter using PX4’s MPC Multirotor
Rate Model with body rate and thrust inputs. A
figure-eight reference trajectory was tracked at
constant altitude by discretizing parametric
equations, confirming smooth, accurate tracking thus
establishing a baseline for extending MPC control to
the more complex tilt-rotor UAV platform.
𝑥
𝑡
=𝑟𝑐𝑜𝑠
𝜔𝑡
𝑦
𝑡
=𝑟𝑠𝑖𝑛
2𝜔𝑡
𝑧
𝑡
=𝑧0
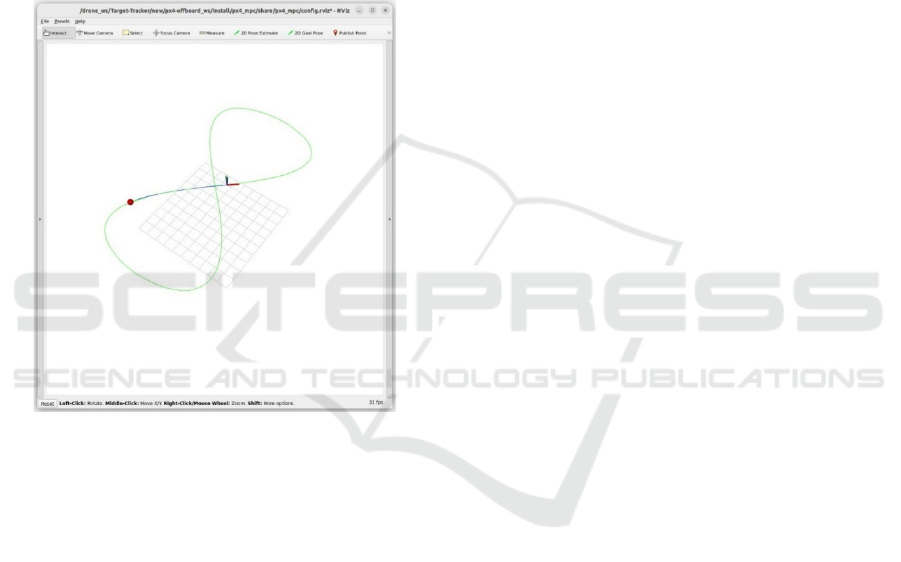
Figure 11: MPC-based quadcopter simulation in RViz
showing tracking of a figure-eight trajectory.
To ensure real-time tracking, the reference
trajectory was interpolated between sampled
waypoints so the MPC solver always received a
continuous setpoint. At each timestep, the control
loop retrieved the UAV’s state, computed tracking
error, constructed the MPC state vector and reference
horizon, and solved for optimal control inputs, which
were published as VehicleRatesSetpoint messages.
Visualisation in RViz was achieved using helper
functions that converted predicted state vectors into
PoseStamped messages and markers for intuitive path
comparison. Simulations demonstrated that the
quadcopter successfully tracked a figure-eight path
with smooth transitions and minimal deviation,
validating the MPC design. The green curve
(reference), red marker (current setpoint), and blue
path (predicted trajectory) in RViz confirmed
effective error minimisation and stability.
The MPC cost function minimized the error
between the predicted state and the figure-eight
reference while penalizing control effort:
min
:
|𝑥
−𝑥
ref
|
+ |𝑢
|
6 CONCLUSION
The design and simulation of a wall-climbing UAV
specifically suited for search and rescue missions in
dangerous, fire-prone areas are presented in this
paper. The UAV's servo-driven tilt-rotor mechanism,
which has been verified by structural and
aerodynamic analyses with SimScale, allows it to
transition between flight and vertical surface
adhesion. Strength, maneuverability, and thermal
resilience are guaranteed by essential elements like
high-thrust EDFs, PLA frames, and carbon fiber
reinforcements. Real-time sensors, a ROS-based
compute unit, and a specially designed alive detection
pipeline that can recognize human life signs using
YOLOv8, MediaPipe eye tracking, and optical flow-
based breathing detection are all integrated into the
UAV's electronics.
The detection system, successfully simulated on a
laptop, classifies individuals into four states: Alive &
Conscious, Alive but Unconscious, Dead, and
Obstructed. It logs results with GPS metadata for
mapping and rescue coordination. Future work will
involve full hardware integration, real-time testing
with ROS nodes, and validation of control strategies
through Model Predictive Control (MPC) in Gazebo.
The UAV will be fire-hardened using Nomex
insulation and tested in indoor and outdoor scenarios
to enable autonomous operation in real-world disaster
environments.
7 FUTURE WORK
In the next phase, we will focus on physical
prototyping and validation. A fully integrated UAV
will be fabricated using a PLA frame coated with
Nomex to improve fire resistance, with thermal
resilience assessed through heat flux and flame
exposure simulations. Indoor and outdoor trials will
evaluate surface stability, wall-climbing
performance, and autonomous navigation under
challenging conditions, including strong ambient
light where Intel RealSense sensors may
underperform. Real-time alive-detection inference
will be optimised on Raspberry Pi or NVIDIA Jetson
Fire-Resistant Wall-Climbing UAV for Victim Detection in Urban Search and Rescue Missions
423

modules, with endurance testing incorporating power
consumption measurements. Limitations in EDF
efficiency and flight time will be addressed through
revised propulsion strategies and adaptive energy
management.
REFERENCES
Akhloufi, T., et al. (2020). Optical flow-based motion
analysis for search and rescue. Computer Vision and
Image Understanding, 190, 102–118. https://doi.org/1
0.1016/j.cviu.2019.102847
Dudek, J., & Jenkin, M. (2010). Computational principles
of mobile robotics. Cambridge University Press.
Ingle, P., & Chunekar, R. (2016). Human detection in
disaster zones using PIR and ultrasonic sensors.
International Journal of Advanced Research in
Electronics and Communication Engineering, 5(7),
1201–1205.
Joseph, L. (2018). Learning robotics using Python (2nd
ed.). Packt Publishing.
Kalaboina, K., Mandala, S., & Kumar, M. S. V. (2018).
Smart human detection robot using PIR and ultrasonic
sensors. International Journal of Engineering Research
& Technology, 6(13), 141–145.
Kim, S., et al. (2018). Biologically inspired wall-climbing
robots. Annual Review of Control, Robotics, and
Autonomous Systems, 1, 365–391. https://doi.org/
10.1146/annurev-control-060117-105058
Lee, Y., et al. (2020). Fireproofing of UAV airframes using
ceramic insulation. Journal of Intelligent & Robotic
Systems, 97(2), 123–134. https://doi.org/10.1007/s1
0846-019-01076-7
Li, C., et al. (2017). Gecko-inspired climbing UAVs with
adhesive microstructures. Bioinspiration &
Biomimetics, 12(4). https://doi.org/10.1088/1748-319
0/aa7e59
Li, Y., Gao, J., & Zhang, H. (2021). AI-driven UAV
reconnaissance for post-disaster damage assessment.
IEEE Transactions on Humanitarian Technology, 9(3),
145–152. https://doi.org/10.1109/THT.2021.3076548
Mishra, N. (n.d.). Emergency response and search and
rescue. Retrieved from https://www.nikhileshmis
hra.com/emergency-response-and-search-and-rescue/
Mulgaonkar, C., et al. (2016). Power and weight
optimization for micro aerial vehicles. IEEE Robotics
& Automation Magazine, 23(4), 78–89. https://doi.org/
10.1109/MRA.2016.2601932
Murphy, R. (2004). Trial by fire: Lessons from rescue
robotics. IEEE Robotics & Automation Magazine,
11(3), 50–61. https://doi.org/10.1109/MRA.2004.133
7848
Myeong, H., & Myung, H. (2020). A bio-inspired quadrotor
with tiltable rotors for improved wall-perching and
climbing. IEEE/ASME Transactions on Mechatronics,
25(4), 1809–1819. https://doi.org/10.1109/TMECH.
2020.2969117
Patel, A., Deshmukh, R., & Srinivasan, M. (2020). Deep
learning-enabled UAVs for victim detection in disaster
zones. In International Conference on Intelligent
Systems (pp. 231–238). IEEE.
Redmon, J., et al. (2018). YOLOv3: An incremental
improvement. arXiv:1804.02767. https://arxiv.org/a
bs/1804.02767
Siegwart, R., Nourbakhsh, I. R., & Scaramuzza, D. (2011).
Introduction to autonomous mobile robots (2nd ed.).
MIT Press.
Sharma, A., & Mahapatra, A. (2021). Breath detection in
disaster victims using vision-based optical flow.
Procedia Computer Science, 186, 89–96. https://doi.
org/10.1016/j.procs.2021.04.103
Spenko, M., et al. (2012). Electroadhesion technology for
robotic perching. IEEE Transactions on Robotics,
28(5), 1079–1089. https://doi.org/10.1109/TRO.2012.
2208773
Sun, L., et al. (2021). Quadcopters with active suction
mechanisms for wall traversal. IEEE Access, 9, 11341–
11352. https://doi.org/10.1109/ACCESS.2021.3050234
Tan, R., et al. (2021). Thermal survivability of UAVs in
industrial fires. Sensors, 21(18), 1–14. https://doi.org/1
0.3390/s21186102
TheTechArtist. (n.d.). Robots for hazardous environments.
Retrieved from https://thetechartist.com/robots-for-
hazardous-environments/
Wang, H., et al. (2021). Magnetic wall-climbing drones for
structural inspection. Automation in Construction, 133,
103–122. https://doi.org/10.1016/j.autcon.2021.103982
Zhang, F., et al. (2020). MediaPipe face mesh: A real-time
face landmark system. Google AI Blog. https://ai.
googleblog.com/2020/08/mediapipe-facemesh.html
Zhang, W., et al. (2021). Fire-resistant UAV design with
silica-based aerogels. Materials Today: Proceedings,
36, 82–88. https://doi.org/10.1016/j.matpr.2020.04.373
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
424
