
Combining off-Policy and on-Policy Reinforcement Learning for
Dynamic Control of Nonlinear Systems
Hani Hazza A. Ahmed
a
, Simon G. Fabri
b
, Marvin K. Bugeja
c
and Kenneth. Camilleri
d
Department of Systems and Control Engineering, University of Malta, Msida, Malta
Keywords: Control Systems, Q-Learning, SARSA, QARSA, Reinforcement Learning, Nonlinear, Cart Pole, AI,
Rewards, on-Policy, off-Policy, Python.
Abstract: This paper introduces QARSA, a novel reinforcement learning algorithm that combines the strengths of off-
policy and on-policy methods, specifically Q-learning and SARSA, for the dynamic control of nonlinear
systems. Designed to leverage the sample efficiency of off-policy learning while preserving the stability and
lower variance of on-policy approaches, QARSA aims to offer a balanced and robust learning framework.
The algorithm is evaluated on the CartPole-v1 simulation environment using the OpenAI Gym framework,
with performance compared against standalone Q-learning and SARSA implementations. The comparison is
based on three critical metrics: average reward, stability, and sample efficiency. Experimental results
demonstrate that QARSA outperforms both Q-learning and SARSA, achieving higher average rewards,
stability, sample efficiency, and improved consistency in learned policies. These results demonstrate
QARSA’s effectiveness in environments were maximizing long-term performance while maintaining learning
stability is crucial. The study provides valuable insights for the design of hybrid reinforcement learning
algorithms for continuous control tasks.
1 INTRODUCTION
Reinforcement Learning (RL) has become a
prominent approach in developing intelligent agents
capable of learning optimal behaviors through
interactions with their environment. Central to this
paradigm is the reward signal, which the agents aim
to maximize over time. The flexibility and
effectiveness of RL have made it widely applicable
across diverse domains such as robotics and game
playing, cementing its importance in artificial
intelligence research (AlMahamid & Grolinger,
2022).
Among various RL methodologies, temporal
difference (TD) learning stands out for its capacity to
learn from direct interactions without explicit
environmental models.
This paper introduces a novel reinforcement
learning algorithm, QARSA, combining off-policy
and on-policy learning approaches, specifically Q-
a
https://orcid.org/0009-0006-1466-2138
b
https://orcid.org/0000-0002-6546-4362
c
https://orcid.org/0000-0001-6632-2369
d
https://orcid.org/0000-0003-0436-6408
learning and SARSA. Off-policy methods like Q-
learning emphasize past experiences, enhancing the
accumulation of rewards, sample efficiency, and
facilitating rapid learning. Conversely, on-policy
methods such as SARSA directly utilize the current
policy in their updates, resulting in greater stability
and lower variance. By merging these complementary
features, QARSA, the novel algorithm proposed in
this work, aims to achieve improved rewards and
sample efficiency alongside increased stability.This
is particularly suitable for dynamic control scenarios
involving nonlinear systems.
To evaluate the effectiveness of QARSA, this
work applies the algorithm to the classical cart-pole
problem, a well-established benchmark for assessing
RL performance in control tasks. The cart-pole
environment requires the agent to balance a pole
upright on a moving cart by applying directional
forces, exemplifying the critical balance between
Hani Hazza, A. A., Fabri, S. G., Bugeja, M. K. and Camilleri, K.
Combining off-Policy and on-Policy Reinforcement Learning for Dynamic Control of Nonlinear Systems.
DOI: 10.5220/0013836700003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 387-394
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
387

exploration and exploitation required for successful
control (Surriani et al., 2021).
Therefore, this paper aims to analyze and compare
the performance of QARSA, Q-learning, and SARSA
on the cart-pole problem. This comparison will
provide valuable insights into the relative strengths
and limitations of each algorithm. Additionally, this
paper analyzes the learning curves, final outcomes,
hyperparameter sensitivity, and the impact of various
function approximation techniques. Through this
comprehensive analysis, the strengths and
weaknesses of the new QARSA algorithm are
highlighted, contributing valuable insights into its
practical applicability and scalability in
reinforcement learning for control tasks.
2 BACKGROUND WORK
Two of the most fundamental model-free methods in
RL are Q-Learning and SARSA. Both fall under the
category of Temporal-Difference (TD) learning, and
update a value function based on the agent's
experience without requiring a model of the
environment.
Sutton & Barto, (2018) highlighted that SARSA's
conservative update mechanism can yield superior
performance in environments where cautious
exploration strategies are beneficial. Double Q-
learning (Van Hasselt et al., 2016) and Weighted Q-
learning (Cini et al., 2020) address the overestimation
bias inherent in traditional Q-learning, leading to
enhanced stability and improved outcomes,
particularly in environments characterized by high
complexity and variability in action-value functions.
Several comparative analyses have investigated how
RL algorithm performance can be influenced by
exploration methods (e.g., ε-greedy, softmax), reward
shaping, and discretization strategies such as those by
Tokic (2010). These elements are particularly critical
in continuous-state environments like the cart-pole
task, which require discretization for tabular RL
methods.
Nagendra et al. (2017) and Zhong (2024)
conducted comparisons of various RL algorithms,
emphasizing sample efficiency and stability.
However, a thorough comparative analysis explicitly
evaluating Q-learning and SARSA based on
cumulative rewards per episode in this environment
remains under-explored. Mothanna & Hewahi (2022)
demonstrated the applicability of Q-learning and
SARSA in solving the cart-pole problem, proposing
future work to extend the analysis to additional RL
algorithms.
Despite these developments, limited direct
comparative work specifically addresses the learning
efficiency, stability, and ultimate performance of Q-
learning and SARSA in the cart-pole environment.
Most existing comparative studies have either
examined more complex tasks or employed different
evaluation metrics. Those works that focus on the
cart-pole problem utilize the OpenAI Gym simulation
framework and include metrics such as average
reward, stability, sample efficiency, and overall
effectiveness (Brockman et al., 2016).
In (Hazza et al.,2025) the performances of three
reinforcement learning algorithms were collectively
compared under a sensitivity analysis in which all
hyperparameter values were systematically varied to
observe their impact on the learning process. While
Q-learning exhibited marginally higher average and
cumulative rewards, the differences among
Q-learning, SARSA, and Double Q-learning were not
substantial across the tested range, indicating that no
single method decisively outperforms the others.
Q-Learning and SARSA represent two
fundamentally different approaches to value-based
learning (Kommey et al., 2024) . Q-Learning is an
off-policy algorithm that learns the value of the
optimal policy independently of the agent's actions.
While effective in many deterministic environments,
its reliance on the maximum Q-value in the update
step can lead to overestimation bias and instability in
noisy or stochastic environments. In contrast, SARSA
is an on-policy method that learns the value of the
policy the agent is actually following. It tends to be
more stable and risk-averse, especially in
unpredictable environments, but often converges
more slowly and may be overly conservative (Wang
et al., 2013).
With this in mind, this work proposes a novel
hybrid approach, designed to merge the strengths of
on-policy and off-policy reinforcement learning
methods, and tested by simulation on the cart-pole
problem, as detailed in the rest of the paper.
2.1 Q-Learning Algorithm
Q-learning is one of the most widely used RL
algorithms, renowned for its simplicity and
effectiveness, introduced by Watkins in 1989
(Watkins & Dayan, 1992). It is an off-policy
algorithm that estimates the optimal action-value
function Q (s, a) by learning from the maximum
future reward, regardless of the agent's current policy.
Its update rule is defined by Equation (1):
Q (s, a) ← Q (s, a) + α [r + γ max_a′ Q (s′, a′) −
Q (s,a)] (1)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
388

Here, Q (s, a) denotes the Q-value of taking action a
in state s, α is the learning rate, γ is the discount factor,
r is the immediate reward, and s′ is the next state after
action a, and a′ is the action taken in the next state s′.
The use of the maximum Q-value over next actions a′
makes Q-Learning optimistic and efficient in
deterministic settings, but it can suffer from
overestimation in noisy environments.
2.2 SARSA Algorithm
SARSA (State-Action-Reward-State-Action) refers
to an on-policy method that updates the value
function based on the actual actions taken by the
agent under its current policy (Sutton & Barto, 2018).
The SARSA update rule is given by Equation (2):
Q (s, a) ← Q (s, a) + α [r + γ Q (s′, a′) −
Q (s,a)] (2)
In this case, a′ is the next action actually chosen
by the policy, not necessarily the one with the
maximum value. This makes SARSA more
conservative and safer in stochastic environments, as
it learns the action-values according to the policy
being followed.
Previous studies, such as those by Singh and
Sutton (1996), have compared these two algorithms
under various conditions. SARSA tends to perform
better in environments with high variability or where
risk-averse behavior is preferred, while Q-Learning
often converges faster in deterministic tasks.
2.3 QARSA: A Hybrid Reinforcement
Learning Algorithm
Recognizing the complementary strengths and
weaknesses of Q-Learning and SARSA algorithms,
we propose QARSA (a hybrid of the two). This
algorithm combines the update rules of both Q-
Learning and SARSA via a tunable blending
parameter λ ∈ [0,1].
By adjusting λ, QARSA can strike a balance
between the aggressive, policy-independent updates
of Q-Learning and the cautious, policy-aware updates
of SARSA. This makes it particularly suited for
environments that exhibit both deterministic and
stochastic behaviors. We evaluate QARSA against its
parent algorithms to assess performance differences
using simulation experiments in a the cart-pole
control environment.
2.3.1 QARSA Update Rule
The QARSA update rule is given by Equation (3):
Q
(
s, a
)
←Q
(
s, a
)
+αr+γλmax
Q
(
s
,a
)
+
(
1−λ
)
Q
(
s
,a
)
−Q
(
s, a
)
(3)
where s is the current state, a is the current action, r is
the reward, s′ is the next state, a′ is the action taken in
state s′ (based on policy), α is the learning rate, γ is
the discount factor, and λ is the blending factor,
controlling the mix between Q-Learning and SARSA.
This update rule allows for a weighted
combination between on-policy and off-policy
learning.
By adjusting λ, the agent can adopt a learning
style that is best suited to the environment's
characteristics.
2.3.2 Behaviour and Interpretation
When λ→1: QARSA is equivalent to Q-Learning,
using the maximum expected return for future
actions. This can speed up learning but risks
overestimating the value function in stochastic
environments.
When λ→0: QARSA reduces to SARSA, basing the
value update on the actual action taken. This often
results in safer but slower learning.
Intermediate λ: Provides a balance; the agent is
neither too optimistic nor too cautious, which can lead
to improved stability and better generalization.
3 METHODOLOGY
3.1 Environment Setup
The cart-pole problem is a well-known benchmark in
the use of reinforcement learning for control systems.
It is favoured for its straightforward design and fast
training time. However, its simplicity also limits its
applicability, meaning that insights gained from this
task may not extend well to more complex scenarios,
particularly those that involve continuous action
spaces or high-dimensional visual inputs. The RL
model for this setup is shown in Figure 1. In this task,
the agent’s goal is to keep the pole balanced in the
inverted position by applying forces to move the cart
either left or right. The following considerations are
to be noted:
Combining off-Policy and on-Policy Reinforcement Learning for Dynamic Control of Nonlinear Systems
389
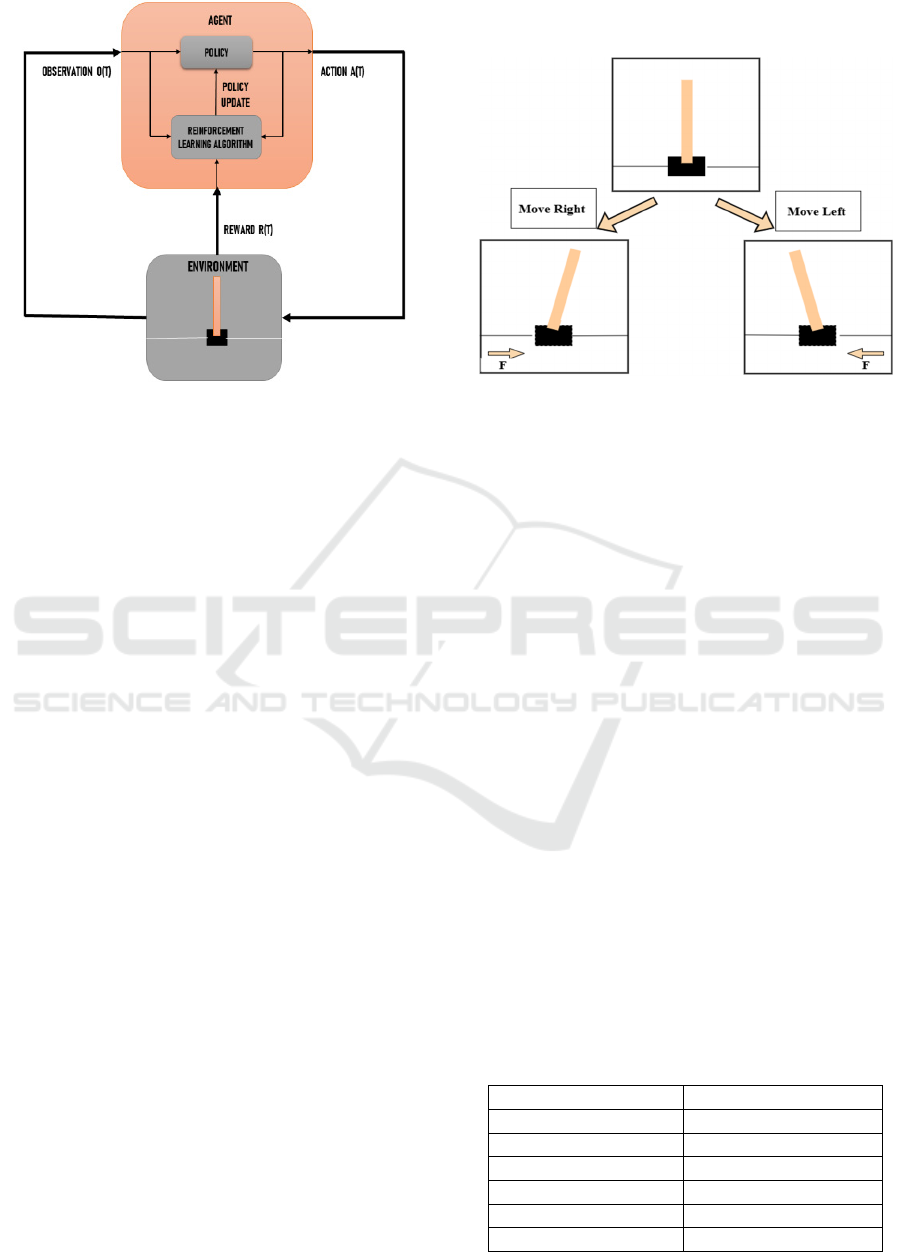
Figure 1: The Reinforcement Learning Model for The Cart
Pole Problem.
• State Space: This consists of the system's
state variables that describe the system’s
dynamics.
The state space consists of four continuous
parameters: The cart position (x), which can vary
within the range of -2.4 to +2.4 meters, the pole angle
(θ) that in this set-up will range from -0.2095 to
+0.2095 radians (equivalent to -12° to +12 °), the cart
velocity (ẋ), and the pole angular velocity ((𝜃) ). The
last two are unbounded and can take any value
(Mishra & Arora, 2023).
• Action Space: The action space is discrete
and consists of two possible moves:
0: Apply force to push the cart to the left, and
1: Apply force to push the cart to the right.
The resulting state depends on the action taken. For
example, as illustrated in Figure 2, if the system starts
with the pole in an upright position and the cart is
pushed to the left, the pole typically leans to the right,
leading to a new state, and vice versa.
• Reward Structure: The agent earns a
reward of +1 for every time step that the pole
angle remains within the ± 12° angle range.
If the pole tilts beyond ±12 degrees or when the cart
position exceeds the horizontal boundary of ±2.4m
from the centre, that specific episode of the simulation
is stopped. An episode is also stopped if the pendulum
angle and position remain within the prescribed ranges
for up to 500 time steps, corresponding to 10 seconds
of simulated time, with each step representing 20
milliseconds, this being considered as constituting
successful balancing control for a significant amount
of time (Li et al., 2024).
Figure 2: Typical Actions Performed by The Cart Pole
Problem.
3.2 Algorithm Implementation
As this study aims to implement and compare the
Q-learning, SARSA, and QARSA algorithms, they
were developed using the same core parameters to
ensure a fair and consistent evaluation. Q-learning is
implemented using a tabular approach, where the
action-value function Q (s, a) is stored in a table and
updated using the Bellman Equation 1. Similarly,
SARSA is applied as a tabular method, but its Q-
value updates incorporate the action taken in the next
state, following the SARSA update rule in Equation
2. QARSA combines elements of both Q-learning and
SARSA, as described in Section 2.3.
Table 1 presents the hyperparameter values
identified through experimental trials as having the
most significant influence on the algorithms’
performance (Jumaah et al., 2025). These parameter
values were chosen based on established practices in
the literature and were fine-tuned to enhance the
overall performance of all three algorithms. The
second column of Table 1 displays the optimized
values found by experimentation to yield the best
results.
Table 1: Hyperparameter values of Q-Learning, SARSA,
and QARSA algorithms for the Cart Pole Problem.
Hyperparameter Value
Learning Rate α 0.09
Discount Factor γ 0.07
Blending factor λ 0.5
Exploration Strategy ϵ 0.995
Number of Episodes 5000
Max Steps per Episode 500
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
390
3.3 Experimental Procedure
The experimental process was structured as follows:
Each algorithm began by initializing the Q-table(s) to
zero for all state-action pairs. Training commenced
by resetting the CartPole-V1 environment to initialize
the starting state for each episode. Actions were
selected using the epsilon-greedy policy, primarily
choosing the action with the highest estimated
reward. The selected action was executed, after which
the environment's reward and next state were
observed. Subsequently, the Q-value(s) were updated
according to the algorithm-specific update rule. If an
episode concluded due to the pole falling or the cart
moving out of bounds, the total accumulated reward
for that episode was recorded.
3.4 Performance Metrics
The following metrics were employed to assess the
algorithm performance (Escobar et al., 2020):
• Average Reward: Calculated as the mean total
reward received per episode throughout the
training period, serving as a primary indicator of
algorithm efficacy.
• Stability: This metric assesses the consistency
of algorithm performance once convergence is
achieved. Stability was quantified by calculating
the standard deviation of rewards over the final
100 episodes, with lower values indicating
higher stability and consistent behavior.
• Sample Efficiency: This evaluates how
effectively an algorithm improves its
performance given limited experiences.
Specifically, sample efficiency was measured
by the cumulative reward obtained over the first
1000 episodes, reflecting how rapidly each
algorithm learns an effective policy.
3.5 Computational Issues
All algorithms and simulations were implemented
using Python 3.10 with the following essential
libraries: the OpenAI Gym: CartPole-v1
environment, NumPy for numerical computation, and
Matplotlib for visualization and plotting of learning
curves. Experiments were executed on a standard
computer equipped with a 12th Gen Intel(R) Core
(TM) i9-12900K 3.20 GHz processor, 32.0 GB RAM,
and NVIDIA® GeForce RTX™ 4090 GPU to run the
simulations in a reasonable time.
Evaluation becomes computationally expensive
due to the rapid growth of the state and action spaces
as discretization increases. For instance, discretizing
the state variables cart position, cart velocity, pole
angle, and pole angular velocity into fixed intervals
significantly expands the size of the state-action
space, leading to increased computational overhead
and complexity in learning and decision-making
possible state-action (Tallec et al., 2019). As a result,
the Q-table grows exponentially with finer
discretization, significantly increasing memory
requirements and the computational overhead for
value updates during training. Moreover, each
simulation involves frequent table lookups, policy
evaluations, and Q-value updates, all of which scale
with the size of the discretized space.
This necessitates high-performance
computational resources, especially when running
repeated trials across multiple algorithms to study the
statistical significance of the results in comparative
analyses (Gogineni et al., 2024).
4 RESULTS AND DISCUSSION
The performance of the Q-learning, SARSA, and
QARSA reinforcement learning algorithms was
assessed using the previously described metrics
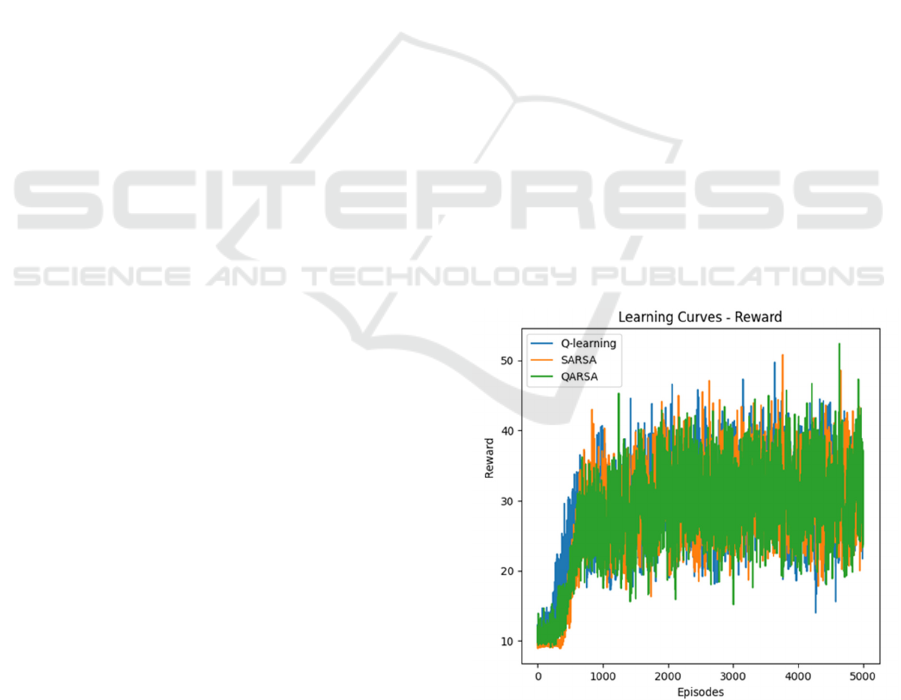
across 5,000 episodes. The first results are illustrated
in the learning curves shown in Figure 3. All three
algorithms demonstrate rapid progress during the first
1,000 episodes, suggesting fast initial learning, but
also display significant variability in their
performance.
Figure 3: Reward Performance of Q-Learning, SARSA, and
QARSA Algorithms for The Cart Pole Problem.
This pattern may reflect the agent’s exploration of
various strategies or challenges in consistently
Combining off-Policy and on-Policy Reinforcement Learning for Dynamic Control of Nonlinear Systems
391
maximizing rewards, potentially due to a non-
stationary or highly stochastic environment.
The frequent intersections of the learning curves
further support the notion that the algorithms perform
comparably overall, with no single method clearly
outperforming the others throughout all episodes.
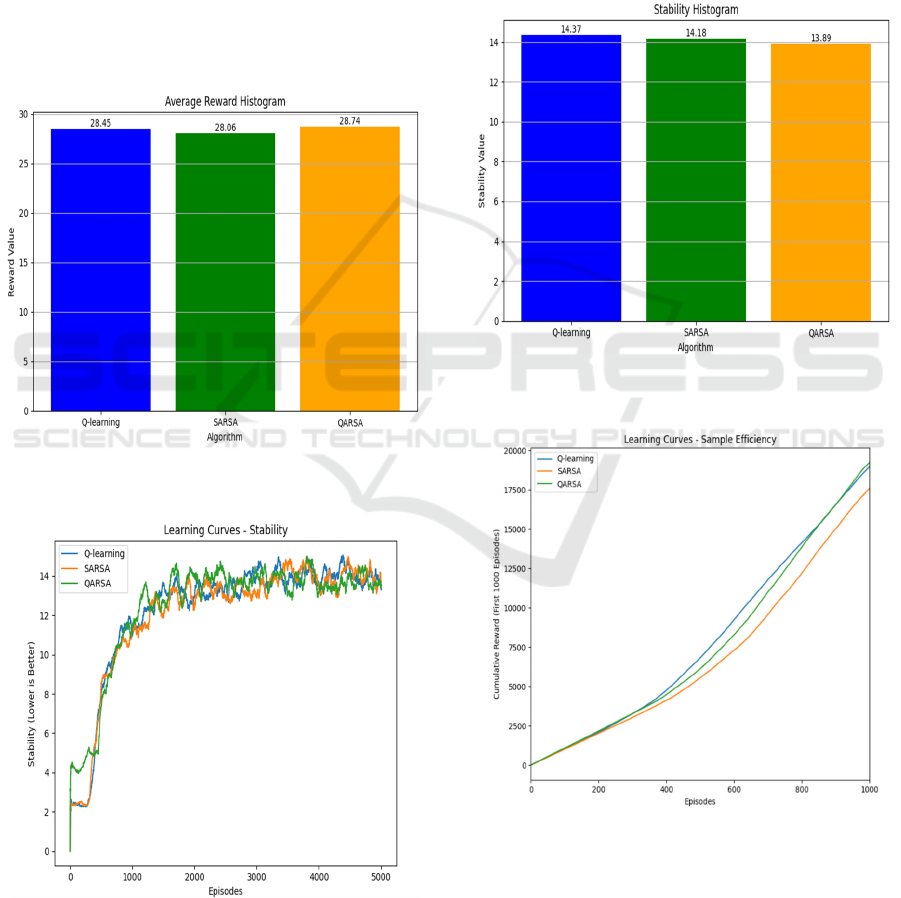
This observation is consistent with the average
reward results that highlight QARSA's slight
advantage in overall performance, as illustrated in
Figure 4.
QARSA attained the highest average reward
(28.74) with a total of 143712.4 rewards, followed
closely by Q-learning average reward (28.45) with a
total of 142264.9 rewards, and then SARSA average
reward (28.06) with a total of 140319.2 rewards.
Figure 4: The Average Reward of Q-Learning, SARSA, and
QARSA Algorithms for The Cart Pole Problem.
Figure 5: Stability Performance of Q-Learning, SARSA,
and QARSA Algorithms for The Cart Pole Problem.
The slight differences in average rewards suggest
that all three algorithms performed similarly
regarding overall effectiveness. However, QARSA's
slightly higher average reward indicates it may have
a marginal advantage in maximizing long-term
returns.
The stability metrics for all three algorithms were
also comparable, with SARSA showing slightly
better stability (14.18) compared to Q-learning
(14.37) and QARSA showing the best stability
(13.89), as shown in Figures 5 and 6.
Figure 6: Stability of Q-Learning, SARSA, and QARSA
Algorithms for The Cart Pole Problem.
Figure 7: Sample Efficiency Performance of Q-Learning,
SARSA, and QARSA Algorithms for The Cart Pole
Problem.
As shown in Figures 7 and 8, QARSA demonstrated
the best sample efficiency (19212), followed by Q-
learning (18964.4) and SARSA (17585.2). QARSA
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
392
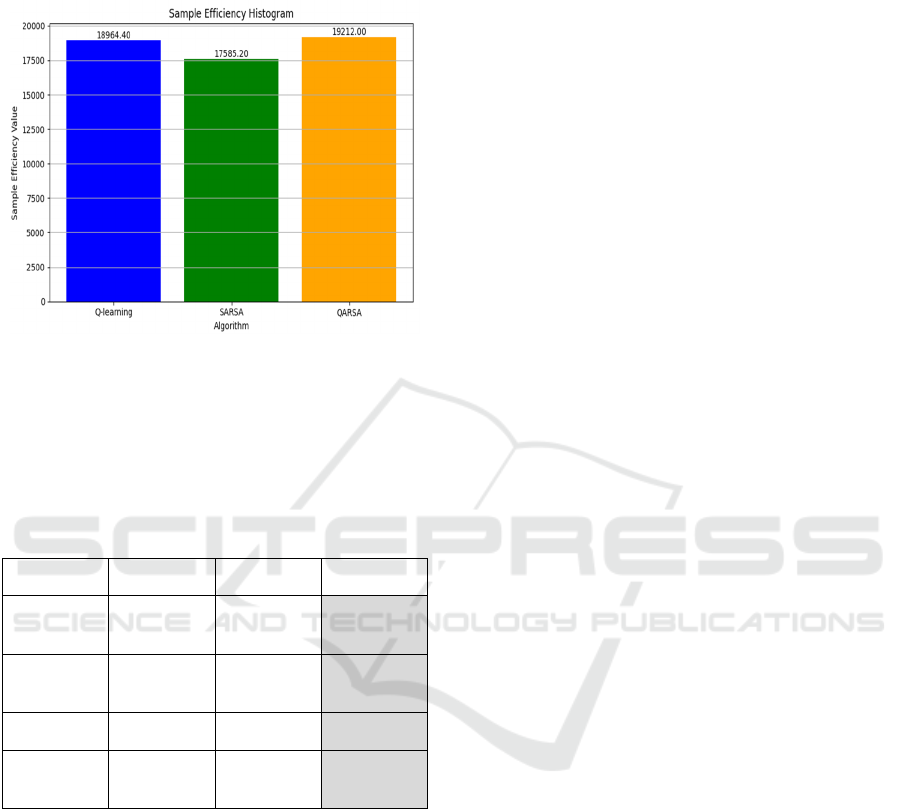
may learn more effectively from fewer experiences,
potentially making it more suitable for environments
where data collection is costly or limited.
Figure 8: The Sample Efficiency of Q-Learning, SARSA,
and QARSA Algorithms for The Cart Pole Problem.
Table 2 summarizes the final metrics obtained in the
three algorithms for the Cart Pole Problem, where the
best results are highlighted in grey.
Table 2: The Performance Comparison of Q-Learning,
SARSA, and QARSA for The Cart Pole Problem.
Metrics Q-Learning SARSA QARSA
Total
Rewards
142264.9 140319.2 143712.4
Average
Reward
28.45 28.06
28.74
Stability 14.37 14.18 13.89
Sample
Efficiency
18964.4 17585.2
19212
4 CONCLUSIONS AND FUTURE
WORK
This paper proposed QARSA, a novel reinforcement
learning algorithm that integrates off-policy and on-
policy learning principles by combining Q-learning
and SARSA. QARSA was evaluated in the CartPole-
v1 environment and compared against its constituent
algorithms. Simulation results demonstrated that for
the cart-pole problem, QARSA marginally
outperformed both Q-learning and SARSA across all
key performance metrics, achieving higher average
rewards, greater stability, and higher sample
efficiency. These results suggest investigating further
the performance of the proposed QARSA hybrid
reinforcement learning method for dynamic control
settings. Future work will thus focus on testing
QARSA in other complex environments, not only the
cart-pole problem, to investigate its scalability to
continuous state and action spaces, and explore
methods for determining the optimal value of the
blending factor between Q-learning and SARSA,
which is possibly dependent on the characteristics of
the system being controlled and the desired control
tasks. Finally, we will rigorously investigate the
comparative performance between the three
algorithms through Monte Carlo analysis and
statistical significance tests. Each algorithm has its
strengths, and literature shows that the choice of
optimal hyperparameters depends on the scenario
defining the problem and the specific requirements of
the task at hand (Manglik & Tripathi, 2018).
ACKNOWLEDGEMENTS
Research supported by project: “Setting up of a
transdisciplinary research and knowledge exchange
(TRAKE) complex at the University of
Malta (ERDF.01.124)” co-financed through the
European Union's European Regional Development
Fund 2014–2020.
REFERENCES
AlMahamid, F., & Grolinger, K. (2021). Reinforcement
Learning Algorithms: An Overview and Classification.
2021 IEEE Canadian Conference on Electrical and
Computer Engineering (CCECE), 2021, pp. 1-7
Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., & Zaremba, W. (2016). OpenAI
Gym. arXiv.org. https://arxiv.org/abs/1606.01540.
Cini, A., D'Eramo, C., Peters, J., & Alippi, C. (2020). Deep
reinforcement learning with weighted Q-
Learning. arXiv preprint arXiv:2003.09280.
Escobar, C. A. M., Pappalardo, C. M., & Guida, D. (2020).
A parametric study of a deep reinforcement learning
control system applied to the swing-up problem of the
cart-pole. Applied Sciences Switzerland, 10(24), 1–19.
Gogineni, K., Dayapule, S. S., Gomez-Luna, J., Gogineni,
K., Wei, P., Lan, T., Sadrosadati, M., Mutlu, O., &
Venkataramani, G. (2024). SwiftRL: Towards Efficient
Reinforcement Learning on Real Processing-In-
Memory Systems. ISPASS 2024, 217–229.
Hazza, H., Ahmed, A., Fabri, S. G., Bugeja, M. K., &
Camilleri, K. (2025). Reinforcement Learning Control
Strategies: Q-learning, SARSA, and Double Q-
learning Performance for the Cart-Pole Problem.2025
Combining off-Policy and on-Policy Reinforcement Learning for Dynamic Control of Nonlinear Systems
393

International Conference on Control, Automation and
Diagnosis (ICCAD), pp.1-6, 2025.
Jumaah, M. A., Ali, Y. H., & Rashid, T. A. (2025). Efficient
Q-learning hyperparameter tuning using FOX
optimization algorithm. Results in Engineering, 25.
Kommey, B., Isaac, O. J., Tamakloe, E., & Opoku, D.
(2024). A Reinforcement Learning Review: Past Acts,
Present Facts and Future Prospects. Journal Research
and Development (ITJRD), 8(2).
Li, P., Hao, J., Tang, H., Fu, X., Zhen, Y., & Tang, K.
(2024). Bridging evolutionary algorithms and
reinforcement learning: A comprehensive survey on
hybrid algorithms. IEEE Transactions on evolutionary
computation.
Manglik, A., & Tripathi, S. (2018). Towards integrating
model dynamics for sample efficient reinforcement
learning. Deep Reinforcement Learning (16-720)
Project.
Mishra, S., & Arora, A. (2023). A Huber reward function-
driven deep reinforcement learning solution for cart-
pole balancing problem. Neural Computing and
Applications, 35(23), 16705–16722.
Mothanna, Y., & Hewahi, N. (2022). Review on
Reinforcement Learning in CartPole Game. 2022
International Conference on Innovation and
Intelligence for Informatics, Computing, and
Technologies, 3ICT 2022, 344–349.
Nagendra, S., Podila, N., Ugarakhod, R., & George, K.
(2017). Comparison of reinforcement learning
algorithms applied to the cart-pole problem. 2017
International Conference on Advances in Computing,
Communications and Informatics, ICACCI 26–32.
Singh, S. P., & Sutton, R. S. 1996. Reinforcement learning
with replacing eligibility traces. Machine Learning. 22,
123–158.
Surriani, A., Wahyunggoro, O., & Cahyadi, A. I. (2021).
Reinforcement Learning for Cart Pole Inverted
Pendulum System. IEACon IEEE Industrial Electronics
and Applications Conference, 297–301.
Sutton, R. S., & Barto, A. G. (2018). Reinforcement
learning : an introduction. The MIT Press.
Tallec, C., Blier, L., & Ollivier, Y. (2019). Making Deep Q-
learning methods robust to time discretization.
http://arxiv.org/abs/1901.09732.
Tokic, M. (2010). Adaptive ε-greedy exploration in
reinforcement learning based on value differences.
Lecture Notes in Computer Science (Including
Subseries Lecture Notes in Artificial Intelligence and
Lecture Notes in Bioinformatics),6359 LNAI,203–210.
Van Hasselt, H., Guez, A., & Silver, D. (2016, March).
Deep reinforcement learning with Double Q-learning.
The AAAI conference on artificial intelligence (Vol.
30, No. 1).
Wang, Y. H., Li, T. H. S., & Lin, C. J. (2013). Backward
Q-learning: The combination of Sarsa algorithm and
Q-learning. Engineering Applications of Artificial
Intelligence, 26(9), 2184–2193.
Watkins, C. J. C. H., & Dayan, P. (1992). Q-Learning,
Machine Learning, 8(3), 279-292.
Zhong, L. (2024). Comparison of Q-learning and SARSA
Reinforcement Learning Models on Cliff Walking
Problem (pp. 207–213).
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
394
