
Kinematic and Dynamic Analysis of Quadruped Legged Robots: A
New Formulation Approach
Vyshak Sureshkumar
a
, Khalifa H. Harib
b
and Adewale Oriyomi Oseni
c
Dept. of Mechanical and Aerospace Eng., United Arab Emirates University, Al Ain, U.A.E.
Keywords: Newton-Euler Recursive Formulation, Dynamic Modelling, Kinematic Modelling, Quadruped, Rigid-Body
Dynamics.
Abstract: This paper presents a framework for efficient kinematic and dynamic modelling of a quadruped robot using
the recursive Newton-Euler method. The robot features 12 actuators—three per leg—and is analysed under
both static walking and dynamic trotting gaits. The formulation incorporates assumed ground reaction forces
and system over-constraints, enabling the resolution of contact forces through a reduced set of six linear
equations. Twelve generalized coordinates are used for static gait analysis, with an additional generalized
coordinate introduced for dynamic trotting. Body attitude, velocity, and acceleration are derived from joint-
space trajectories, and forward dynamics is computed by inverting the inverse dynamics equations by
numerically evaluating the mass matrix and nonlinear torque vectors. By employing a reduced set of
generalized coordinates and simplified constraint handling of ground reactions, the proposed framework
streamlines rigid-body dynamic simulation for such a high-degree-of-freedom system.
1 INTRODUCTION
Modelling of engineering systems and processes is a
critical step toward achieving robust and accurate
control. This is equally applicable in the field of
robotics, where obtaining a realistic and precise
dynamic model is essential for accurate motion
control. Achieving high levels of autonomy,
accuracy, and precision in robotic systems
necessitates a thorough understanding of the
underlying kinematic and dynamic principles specific
to the robot. These fundamentals are critical for the
precise control, modelling, and optimization of
robotic behaviour.
Kinematics, which characterizes the
mathematical framework governing the motion of
robotic systems independent of forces, plays a vital
role in the design and analysis phases of robotic
system development. In contrast to kinematics,
dynamics focuses on the relationship between the
forces, torques, and the resulting motion of the
respective robotic system. This understanding is
fundamental for accurate modelling and control,
a
https://orcid.org/0000-0002-5966-5010
b
https://orcid.org/0000-0002-0318-5712
c
https://orcid.org/0000-0002-3036-2534
enabling the development of control strategies that
ensure good performance and stability. Dynamic
analysis is essential for designing controllers capable
of adapting to varying environmental conditions,
thereby enhancing the robot's reliability and
robustness. By analysing the forces and torques
required to achieve desired motions, one can optimize
system design for energy efficiency without
sacrificing performance. Similar to kinematics,
dynamics also provides insight into the interaction
between the robot and its environment, which is
critical for executing complex tasks such as terrain
exploration and manipulation.
Locomotion in multi-body systems, such as
legged robots, presents significant complexity due to
the coupled nature of joint interactions and
intermittent ground contacts. Addressing key
challenges such as stability control and trajectory
planning necessitates a comprehensive understanding
of the system’s kinematic and dynamic behaviour.
Currently, the majority of quadruped dynamic models
are formulated using the Euler-Lagrange approach,
which systematically derives the equations of motion
410
Sureshkumar, V., Harib, K. H. and Oseni, A. O.
Kinematic and Dynamic Analysis of Quadruped Legged Robots: A New Formulation Approach.
DOI: 10.5220/0013835900003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 410-416
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

based on energy methods and generalized coordinates
(He et al., 2016; Sun et al., 2007). The Euler-
Lagrange approach derives the equations of motion
by computing the system’s kinetic and potential
energy, while incorporating closed kinematic chains
and high-dimensional constraint conditions. This
often necessitates the introduction of additional
generalized coordinates and constraint equations,
resulting in a set of differential-algebraic equations
(DAEs) that are computationally intensive to solve.
An alternative that is widely adopted in multibody
dynamics is the Newton-Euler formulation, which
employs a recursive algorithm to compute the
equations of motion and joint torques more efficiently
(Bennani & Giri, 1996; Fu & Gao, 2022; Liu et al.,
2019; Potts et al., 2011). While the forces and
moments can be numerically computed with relative
ease (Morais et al., 2021; Shi et al., 2021) analytical
solutions using this formulation are often complex
and introduce unnecessary constraint forces. In most
cases, in addition to the body six variables and their
derivatives, 12 joint states, and their derivatives, are
required to calculate joint forces and moments.
In this paper, we propose an accurate model that
captures the underlying rigid-body dynamics of the
quadruped robot while reducing simulation
complexity and improving computational efficiency.
The model is designed to exploit the kinematic over-
constraints present in the quadruped system, reducing
the number of generalized coordinates to 12 for static
walking and 13 for dynamic walking, thereby
simplifying the dynamic equations. Furthermore, the
study focuses on formulating a recursive algorithm
for computing the input joint torques, enabling
efficient dynamic analysis and accurate derivation of
the system’s equations of motion. Computational
efficiency is significantly enhanced by formulating
the equations of motion such that only six unknown
ground reaction force components need to be solved.
This reduction in dimensionality streamlines the
overall dynamic computation and improves the
accuracy and efficiency of force and moment
calculations within the system
2 KINEMATIC MODEL
The quadruped model presented in this study features
four identical legs with symmetric kinematic
configurations. The coordinate frame assignment for
a representative leg is illustrated in Fig. 1.
Frame 0 is defined as the reference frame for the
leg and maintains a constant orientation relative to the
body frame. Its axes are aligned such that the x, y, and
z axes of Frame 0 correspond to the y, x, and z axes of
the body frame, respectively. Frame 1 is assigned to
the actuator responsible for the Hip
Abduction/Adduction (HAA) joint. Frame 2 is
associated with the Hip Flexion/Extension (HFE)
joint, while Frame 3 corresponds to the Knee
Flexion/Extension (KFE) joint. Frame 4 is located at
the end of the leg, representing the end-effector. The
coordinate frames are assigned according to the
Denavit-Hartenberg (D-H) convention. The Z axes of
Frames 1 through 3 are aligned with the axes of
rotation of their respective joints, ensuring
consistency with the joint actuation directions. Due to
the orthogonality between the first and second joint
axes, the Z axes of Frames 1 and 2 are orthogonal,
whereas the Z axes of Frames 2 and 3 are parallel. The
X axis in each frame is defined to be orthogonal to
both its own Z axis and the Z axis of the subsequent
frame. Additionally, the X axes of Frames 2 and 3 are
aligned with the axes of their corresponding links.
Joint angles are defined as the relative angles between
the X axes of two consecutive frames. The system’s
home configuration, illustrated in Fig. 1.a,
corresponds to all joint angles being set to 0
°
,
resulting in the alignment of all X axes across the
kinematic chain as shown in the figure. From this
configuration, a sequential set of joint rotations is
applied to reach the final standing posture depicted in
Fig. 1.d. In Fig. 1.b, Links 2 and 3 are simultaneously
rotated by 90
°
, with respect to Frame 0. Fig. 1.c
shows Link 2 rotated by 45
°
, relative to Frame 1.
Finally, in Fig. 1.d, Link 3 is rotated by 45
°
, relative
to Frame 2, completing the transition to the standing
configuration.
Figure 1: Coordinate frame assignment for a single leg of
the quadruped robot.
Kinematic and Dynamic Analysis of Quadruped Legged Robots: A New Formulation Approach
411
In this work, identical frame assignments are applied
to all four legs of the quadruped system to ensure
consistency and simplify the kinematic formulation.
The coordinate frames are defined using
transformation matrices derived according to the D-H
convention. The corresponding D-H parameters for a
single leg, as represented in the standing
configuration shown in Figure 4.2d, are summarized
in Table 1.
Table 1: Implemented D-H table for the legged system.
𝒊
𝜶
𝒊𝟏
𝒂
𝒊𝟏
𝒅
𝒊
𝜽
𝒊
1 90 0 0
𝜃
2 -90 0 0
𝜃
3 0
𝑙
0
𝜃
4 0
𝑙
0
0
3 INVERSE DYNAMICS
FORMULATION STRATEGY
A primary objective of this research is to develop a
systematic strategy for conducting dynamic analysis
and formulating the equations of motion required for
simulating the rigid-body dynamics of the quadruped
system. The resulting methodology, which will be
elaborated upon in the subsequent section, on the
dynamic analysis, establishes the foundation for
accurate and computationally efficient simulation
model. Prior to presenting the full dynamic
formulation, this section outlines the overall strategy,
which involves the development of a recursive
algorithm for computing the input joint torques.
The input joint torques are computed from joint
reaction moment vectors that are determined starting
from assumingly known ground reaction forces. The
system is analysed recursively, starting from the foot
and progressing to Frame 1 at the HFE joint, solving
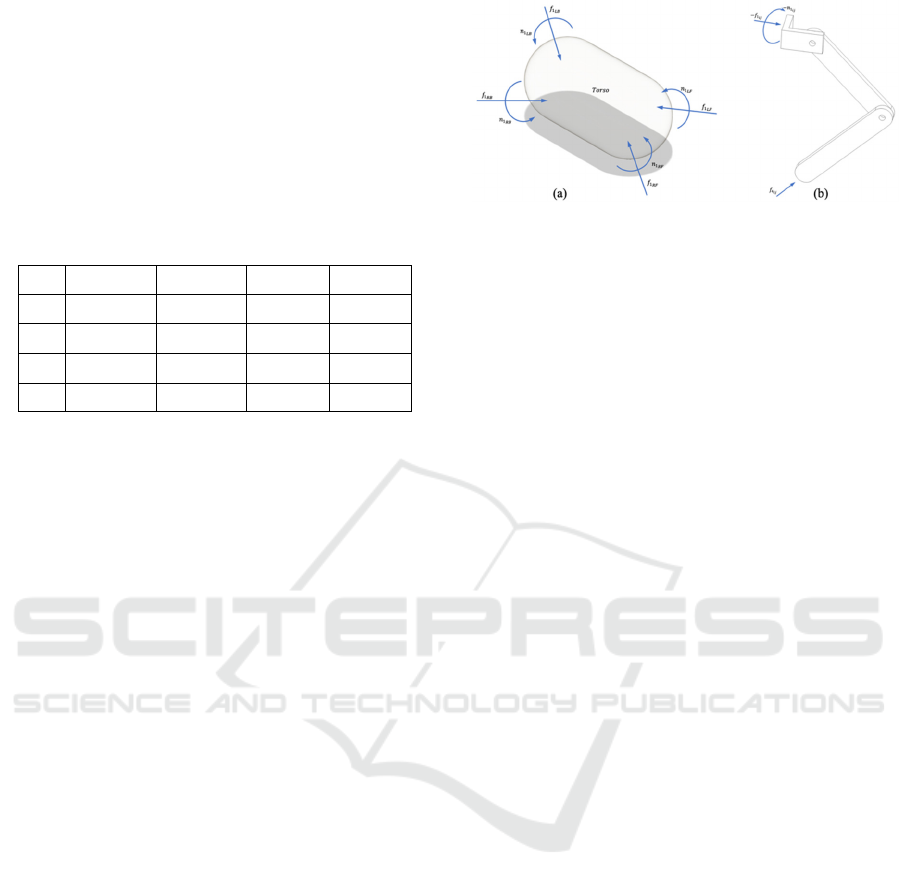
for forces and moments on each link. Fig. 2.a shows
the forces and moments exerted on the torso at all four
HFE joints, while Fig. 2.b illustrates the reaction
force and moment on a single leg at the HFE joint and
the ground.
The HFE joint reaction force and moment vectors,
𝐟
𝟏
𝒊𝒋
and 𝐧
𝟏
𝒊𝒋
are decomposed into two components:
one resulting from the leg's inertial forces and
moments, and the other from the ground reaction
forces, as shown below in (1) and (2), for a single leg.
𝒇
𝒃
𝟏
𝒇
𝒃
𝟏
𝒇
𝒃
𝟏
(1)
Figure 2: Schematic illustration of forces and moments
acting on the torso and a representative leg.
𝒏
𝒃
𝟏
𝒏
𝒃
𝟏
𝒏
𝒃
𝟏
(2)
where, 𝒇
𝒃
𝟏
and 𝒏
𝒃
𝟏
represents the reaction force and
moments exerted by link 1 on the body, excluding the
contribution from the ground reaction force, and
𝒇
𝒃
𝟏
𝑅
𝒇
𝟒
𝟒
and 𝒏
𝒃
𝟏
𝑷
𝒃
𝑅
𝒇
𝟒
𝟒
represents
the reaction forces and moments exerted by the legs
on the body due to ground reaction force.
All force and moment vectors here are expressed
in body-fixed reference frame.
In the initial stage, 𝒇
𝒃
𝟏
and 𝒏
𝒃
𝟏
are computed
under the assumption that all legs are suspended in
air, implying that 𝐟
𝟒
𝒊𝒋
and 𝐧
𝟒
𝒊𝒋
to be 0. The algorithm
then recursively propagates calculating forces and
moments through each joint, progressing toward the
HFE joint for each leg. In the second stage, the still
unknown ground reaction force and moment
components are determined by solving the dynamic
force and moment balance equations as shown in (3)
and (4).
∑
𝑅
𝒇
𝟒
𝟒,𝒊𝒋
𝑚
𝒂
𝒃
𝒃
−𝑮
𝒃
𝒃
−
∑
𝒇
𝒃
𝟏,𝒊𝒋
(3)
∑
𝑷
𝒃
𝟒,𝒊𝒋
𝑅
𝒇
𝟒
𝟒,𝒊𝒋
𝐼
𝜶
𝒃
𝒃
−𝐼
𝝎
𝒃
𝒃
𝝎
𝒃
𝒃
−
∑
𝒏
𝒃
𝟏,𝒊𝒋
(4)
Equations (3) and (4) are formulated with known
right-hand side terms, while the unknowns are
grouped into left-hand side expressions involving
𝒇
𝟒
𝟒,𝒊𝒋
for the four legs. In-depth analyses of the
solution are presented in the subsequent sections.
The system's inverse dynamic analysis is carried
out using the recursive Newton-Euler algorithm
(Craig, 2005). Joint velocities and accelerations are
computed from the body frame to the foot frame using
an outward iteration process. Using these velocity and
acceleration vectors, the inertial force vector 𝑭
𝒊
and
inertial moment vector 𝑵
𝒊
acting on the ith link are
computed via the Newton-Euler equations. The
reaction force 𝑓
and reaction torque 𝑛
at the ith joint
are computed recursively using the reaction force and
torque vectors from the subsequent joint i+1, based
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
412
on the previously calculated force and moment
vectors.
The presented formulations are defined with
respect to a single leg and must therefore be applied
independently to all four legs. The recursive
computation initiates at the last link (Link 3), where
the ground reaction force is either evaluated or
assumed to be zero in the case of a non-contact
(swing) phase. A systematic approach for computing
the ground reaction forces is developed and will be
detailed in the subsequent section.
4 INVERSE DYNAMIC
SOLUTION
The inverse dynamics analysis, which involves
computing joint torques based on the specified
motion of the robot, including the robot’s body, is
conducted with respect to a specific set of ground
reaction forces. Depending on the gait pattern,
multiple leg support configurations are possible. The
nominal configuration corresponds to the quadruped
standing on all four legs, permitting body motions
such as roll, pitch, yaw, and vertical displacement. In
contrast, during a static walking gait, three legs
remain in contact with the ground at any given time,
while one leg is in the swing phase. In dynamic gaits
such as trotting or pacing, two diagonally or laterally
opposed legs are in contact with the ground at any
given time, while the remaining two are in the swing
phase. Additionally, there exist phases, such as during
jumping or bounding, where all four legs are airborne.
To compute the joint torques, required for rigid-body
dynamics, it is essential to determine the
corresponding ground reaction forces. The ground
reaction force computation for each of these scenarios
is discussed in in the following subsections.
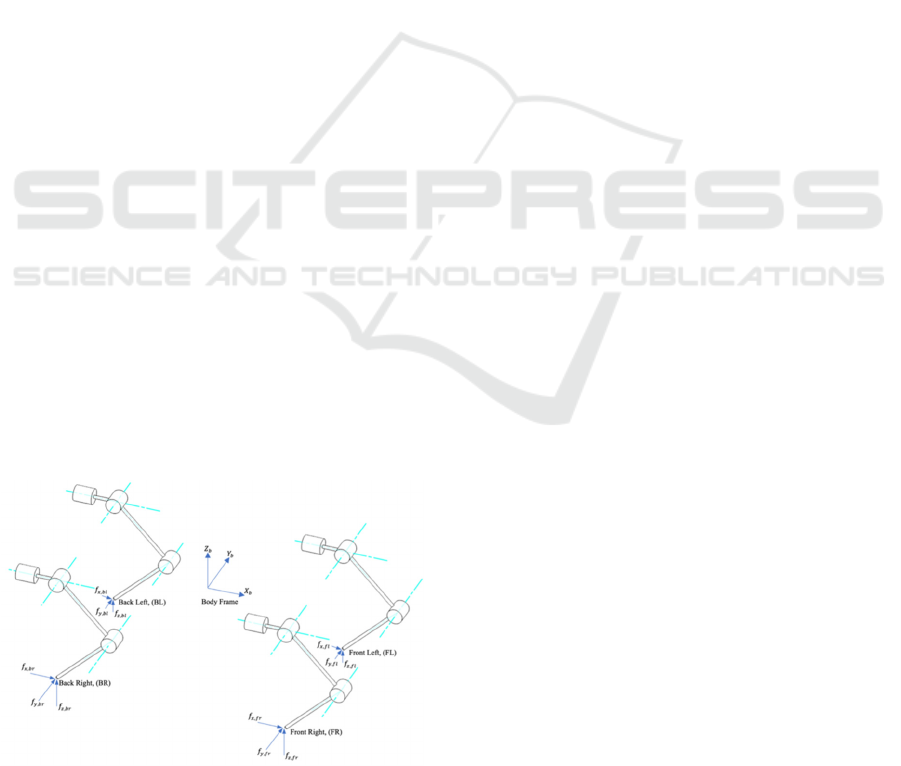
Figure 3: Ground reaction force on the legs of quadruped
system.
4.1 Ground Support on Four Legs
When all four legs are in contact with the ground,
ground reaction forces act on each leg, as depicted in
Fig. 3. This configuration introduces twelve unknown
force components, represented as 𝑓
,
, where i
refers to the left or right leg and j indicates front or
rear leg. However, the dynamic equilibrium of the
robot's body yields only six equations, three for linear
forces and three for moments, corresponding to (3)
and (4). As the system contains six more unknowns
than available equations, it becomes statically
indeterminate and hence requires six additional
constraint equations to fully resolve the ground
reaction forces.
To address this issue, a set of simplifying
assumptions is introduced to provide the necessary
constraint equations. The vertical ground reaction
forces (Z-direction) for all four legs are treated as
independent, contributing four separate unknowns. In
contrast, the ground reaction forces in the X-direction
are assumed to be equal across all four legs, reducing
the associated unknowns to a single variable.
Likewise, the Y-direction ground reaction forces are
assumed identical for all legs, introducing only one
additional unknown. These assumptions reduce the
total number of unknowns to six, allowing the system
to be fully determined from the available dynamic
equilibrium equations.
4.2 Ground Support on Three Legs
During static walking, the robot maintains ground
contact with three legs, resulting in nine unknown
ground reaction force components, still exceeding the
number of available equilibrium equations. To
address this, the same assumptions applied in the full
support case are maintained for the Z and X
directions: three independent vertical (Z-axis)
reaction forces and one common reaction force along
the X-axis, reducing the number of unknowns in these
directions to four. However, the reaction force
components along the Y-direction are viewed as
follows. When one leg is lifted, it is assumed that the
leg on the same side experiences a distinct reaction
force component from the ground along the Y than
the two legs on the opposite side, which are assumed
to receive equal lateral reaction force components
from the ground. This introduces two additional
unknowns along the Y-axis. With these assumptions,
the total number of unknowns is reduced to six,
matching the number of dynamic equilibrium
equations and allowing the reaction forces to be
determined. The static condition in these scenarios
Kinematic and Dynamic Analysis of Quadruped Legged Robots: A New Formulation Approach
413

justifies the simplifying assumptions used. In
dynamic walking, however, all ground reaction force
components are treated independently as outlined next.
4.3 Ground Support on Two Legs and
During Airborne
In dynamic gaits such as trot and pace, the robot
maintains ground contact with only two legs at any
given time. Under these conditions, the reaction force
problem becomes more tractable, as the system
involves only six unknown ground reaction force
components, three per contact point, which can be
determined directly from the equations of motion
without necessitating additional assumptions or
constraints.
Conversely, during a pronk gait, the robot enters
an aerial phase wherein all limbs are off the ground,
resulting in zero ground contact. Consequently, the
ground reaction forces at the feet are identically zero.
This absence of external contact forces simplifies the
system dynamics, allowing for direct computation of
the internal reaction forces and moments exerted by
the legs on the robot’s body based solely on its inertial
properties and joint torques.
5 FORWARD DYNAMICS
With the forward dynamic formulation, the objective
is to determine the acceleration components
corresponding to the generalized coordinates
assuming the knowledge of the input torque vector.
The focus of this study is on two different gait
patterns, namely the static walking gait and the
dynamic trotting gait.
In the case of a static walking gait, three legs
maintain ground contact at any instant of time. This
statically stable support configuration allows the
estimation of the robot body's pose through the
known joint angles of the supporting legs. Under the
assumption of static equilibrium and using forward
kinematic relations, the system is described by twelve
generalized coordinates, corresponding to the three
joint angles 𝜃
,
, 𝜃
,
, 𝜃
,
for each of the four legs,
resulting in a total of twelve joint coordinates. On the
other hand, during the dynamic trotting gait, only two
diagonally opposed legs are in contact with the
ground at any given moment, which results in a
reducing the support polygon to a line. The associated
body rotation cannot be determined solely from the
displacement of the attachment points of the two
supporting legs. To address this limitation, the roll
angle ∅ of the quadruped system is introduced as an
additional generalized coordinate, increasing the total
number of generalized coordinates to thirteen.
The accelerations of the generalized coordinates,
twelve in the case of the static walking gait and
thirteen in the case of the dynamic trotting gait, are
obtained through the forward dynamics formulation.
The resulting accelerations are numerically integrated
twice to obtain the joint velocities and displacements.
The body’s orientation and angular rates are
subsequently determined through forward
kinematics, as described in the previous section. To
evaluate the dynamic model, the inverse dynamics
formulation based on the Newton-Euler recursive
algorithm is used to numerically compute the
system’s inertia matrix, as well as the gravity,
Coriolis, and centrifugal torque vectors (Harib &
Srinivasan, 2003; Walker & Orin, 1982).
Once the inertia matrix, Coriolis and centrifugal
torque vector, and gravity torque vector have been
computed, they are combined with the input torque
vector, generated by the control law, to solve for the
joint acceleration vector as shown in (5). This
acceleration vector is then numerically integrated
twice to obtain the joint velocity and displacement
vectors.
𝒒
= 𝑀
𝒒
𝝉−𝑪
𝒒, 𝒒
−𝑮(𝒒)
)
(5)
A comprehensive analysis of the system dynamics,
control implementation, and experimental validation
are presented in (Sureshkumar, 2025).
6 SIMULATION RESULTS
A simulation was conducted in Simulink to validate
the proposed dynamic formulation. This section
presents a brief overview of the open-loop control
results, wherein the acceleration, velocity, and
displacement vectors obtained from the forward
dynamics are compared against the corresponding
vectors derived from the desired trajectory, computed
using inverse kinematics.
Fig. 4, illustrates the path planning profile for the
dynamic trotting gait, depicting the positional
trajectories of both the robot’s body and the end-
effectors (feet) over the course of the gait cycle. These
trajectories serve as essential inputs for the inverse
kinematics computation, which subsequently yields
the desired joint angle trajectories required to achieve
the planned motion. For the dynamic trotting gait, as
depicted in Figure 5.7, the back-right (BR) and front-
left (FL) legs move in unison during one step phase,
followed by the back-left (BL) and front-right (FR)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
414
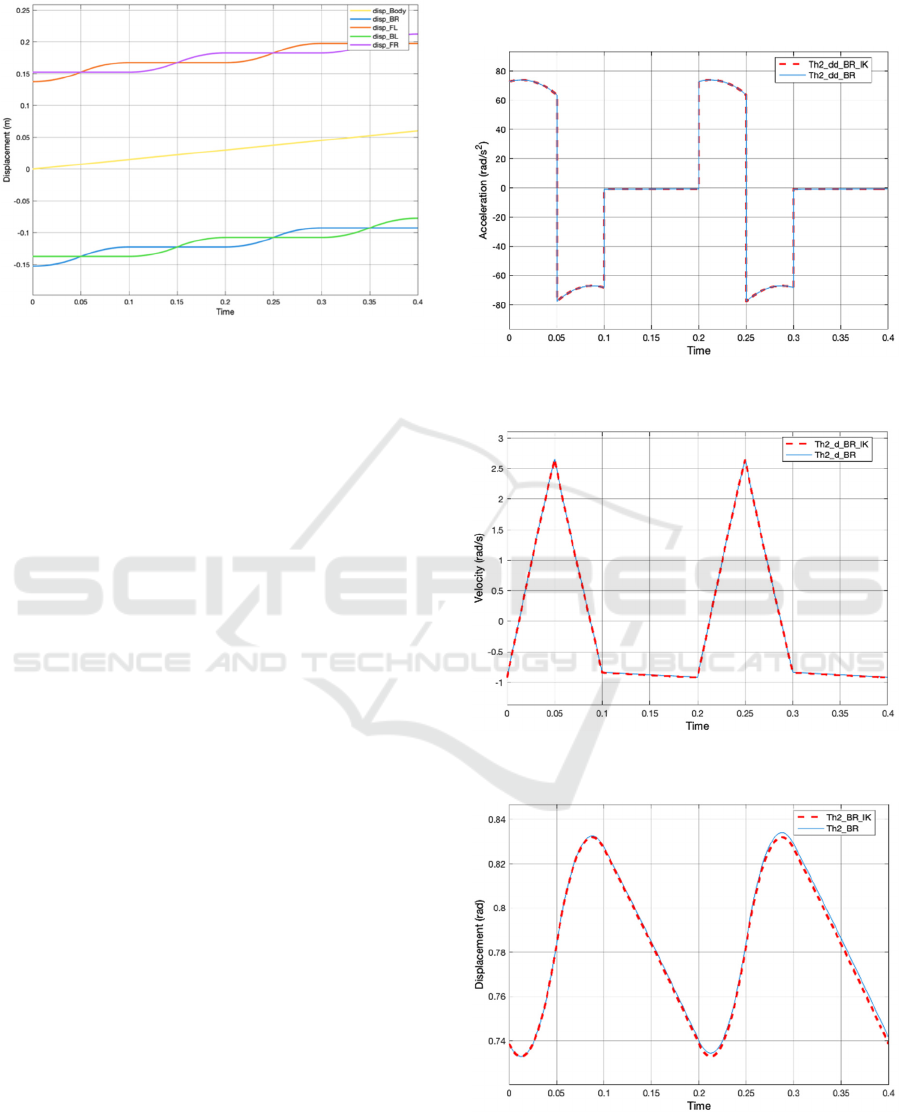
legs during the subsequent phase.
Figure 4: Gait profile for dynamic trotting.
Initially, the inverse kinematics is used to
compute joint positions, velocities, and accelerations,
which serve as inputs to the inverse dynamics model
for calculating the required joint torques. As
discussed in the previous section, the inertia matrix,
Coriolis and centrifugal torque vector, and
gravitational torque vector are determined
numerically. These, along with the input torque
vector, are then used in the forward dynamics
formulation to solve for joint accelerations as
described in (5). The computed joint accelerations are
subsequently integrated twice over time to obtain the
corresponding joint velocities and displacements. The
resulting joint kinematic trajectories are then
compared against those derived from the inverse
kinematics to validate the proposed methodology.
The comparison results in the form of acceleration,
velocity and displacement of the HFE joints of the
back-right leg are shown in Fig. 5 – 7.
Figure 5-7 illustrates high agreement of the
simulation of the joint trajectories obtained from the
forward dynamic simulation with those computed via
the inverse kinematics based on the desired trajectory.
The observed discrepancies are minimal, with a
maximum percentage error of only 0.0006%.
Such results indicate strong validation for the
accuracy and effectiveness of the proposed
methodology in modelling the system dynamics. The
close agreement between the forward dynamics
outputs and the reference trajectories derived from
inverse kinematics demonstrates the reliability of the
implemented numerical framework. Additionally, the
consistency across results confirms the correctness of
the developed code and simulation environment,
ensuring its proper functionality for dynamic
analysis. This validation reinforces the robustness of
the computational framework and supports its
applicability to real-world quadruped robotic systems
for dynamic modelling and control.
Figure 5: Comparison of the HFE joint acceleration for the
back-right (BR) leg.
Figure 6: Comparison of the HFE joint velocity for the
back-right (BR) leg.
Figure 7: Comparison of the HFE joint displacement for the
back-right (BR) leg.
Kinematic and Dynamic Analysis of Quadruped Legged Robots: A New Formulation Approach
415

7 CONCLUSIONS
This study presents the development of a novel
framework for formulating the system dynamics of a
quadruped robot through the systematic selection of
kinematic and dynamic constraints. The dynamic
model is constructed using the recursive Newton-
Euler formulation to ensure computational efficiency.
The forward dynamics is implemented by deriving
the joint acceleration vector from the system rigid
body dynamic equation. A numerical approach is
used to compute the inertia matrix, Coriolis and
centrifugal torque vector, and gravitational torque
vector. These dynamic terms are then utilized to solve
for the joint acceleration vector which could be then
integrated twice in the simulation to obtain the joint
velocity and displacement vectors.
A simulation environment was established for a
quadruped system comprising twelve actuators, with
each leg driven by three independently actuated
joints, enabling full mobility and control authority.
Motion trajectories were generated based on a
predefined dynamic trotting gait. The accuracy of the
dynamic formulation and the developed simulation
model was validated by simulating the system under
representative trajectories corresponding to dynamic
trotting gaits.
A comprehensive analysis of the dynamic
formulation, with a particular focus on the forward
dynamics could include closed-loop control
simulations employing a feedforward and feedback
control strategies, followed by experimental
validation to assess the accuracy and effectiveness of
the proposed approach.
ACKNOWLEDGEMENT
This research is supported by NSSTC UAE-
University under Grant No. 12R153.
REFERENCES
Bennani, M., & Giri, F. (1996). Dynamic modelling of a
four-legged robot. Journal of Intelligent and Robotic
Systems, 17, 419-428.
Craig, J. J. (2005). Introduction to Robotics: Mechanics and
Control. Pearson/ Prentice Hall. https://books.google
.ae/books?id=ZJkOSgAACAAJ
Fu, J., & Gao, F. (2022). Dynamic stability analyzes for a
parallel–serial legged quadruped robot. International
Journal of Advanced Robotic Systems, 19(5),
17298806221132081.
Harib, K., & Srinivasan, K. (2003). Kinematic and dynamic
analysis of Stewart platform-based machine tool
structures. Robotica, 21(5), 541-554.
He, Y., Guo, S., Shi, L., Pan, S., & Guo, P. (2016). Dynamic
gait analysis of a multi-functional robot with bionic
springy legs. 2016 IEEE International Conference on
Mechatronics and Automation,
Liu, M., Qu, D., Xu, F., Zou, F., Di, P., & Tang, C. (2019).
Quadrupedal robots whole-body motion control based
on centroidal momentum dynamics. Applied Sciences,
9(7), 1335.
Morais, S., Singh, H., & Acharya, A. (2021). Trajectory and
Gait Planning of a Quadruped using Adams and
Simulink. 2021 4th Biennial International Conference
on Nascent Technologies in Engineering (ICNTE),
Potts, A., Cruz, D., & Gacovski, Z. (2011). A Kinematical
and Dynamical Analysis of a Quadruped Robot. Mobile
Robots–Current Trends, 239-262.
Shi, Y., Li, S., Guo, M., Yang, Y., Xia, D., & Luo, X.
(2021). Structural design, simulation and experiment of
quadruped robot. Applied Sciences, 11(22), 10705.
Sun, L., Zhou, Y., Chen, W., Liang, H., & Mei, T. (2007).
Modeling and robust control of quadruped robot. 2007
International Conference on Information Acquisition,
Sureshkumar, V. (2025). Dynamic analysis and control of a
quadruped robotic system based on Newton-Euler
formulation [PhD Thesis, United Arab Emirates
University]. Al Ain - UAE.
Walker, M. W., & Orin, D. E. (1982). Efficient dynamic
computer simulation of robotic mechanisms.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
416
