
Adaptive Trajectory Prediction in Roundabouts Using Moving Horizon
Estimation
Selsabil Bougherara
1
, Hasni Arezki
1
, Chouki Sentouh
1,2
, J
´
er
ˆ
ome Floris
1
and Jean-Christophe
Popieul
1,2
1
LAMIH UMR CNRS 8201, Universit
´
e Polytechnique Hauts-de-France, Valenciennes, France
2
INSA Hauts-de-France, Valenciennes, France
Keywords:
Moving Horizon Estimation, Trajectory Prediction, Roundabout Navigation, Automated Vehicles.
Abstract:
This paper addresses the challenge of trajectory prediction for automated vehicles navigating within round-
abouts, where interactions, non-linear motion, and rapid decision-making complicate traditional approaches.
We propose a novel prediction framework based on Moving Horizon Estimation (MHE) combined with a non-
linear kinematic bicycle model. Unlike conventional methods such as the Extended Kalman Filter (EKF), the
proposed MHE-based framework leverages past observations over a sliding time window, enhancing robust-
ness against model uncertainties and noise. The method is validated through simulations using the SHERPA
driving simulator in both static and dynamic maneuvering. The results demonstrate that MHE significantly
outperforms the EKF in terms of prediction accuracy, particularly during complex vehicle behaviors. This
work constitutes a foundational step toward enhancing safety and robustness of decision-making in round-
abouts.
1 INTRODUCTION
Autonomous driving has made significant progress
in recent years, particularly in relatively simple
and well-structured environments such as highways,
where vehicle speed remains nearly constant dur-
ing the decision-making process (Benloucif, 2018;
Oudainia, 2023). For instance, authors of (Guo
et al., 2018) proposed an automated highway merg-
ing strategy that accounts for interactions with sur-
rounding vehicles. However, real-world road envi-
ronments often involve far more complex structures,
such as intersections and roundabouts, where right-
of-way rules, multi-agent interactions, and frequent
trajectory changes make the decision-making process
considerably more challenging. To date, only a lim-
ited number of studies have specifically addressed au-
tonomous driving in roundabouts. A notable contri-
bution is that of (Bellingard, 2023), who proposed
a decision-making framework for navigation in such
environments. However, this work does not rely on
explicit trajectory prediction, but rather on sensor data
analysis, which can be insufficient when perceived in-
formation is uncertain or incomplete.
Navigating through a roundabout consists of three
main phases: insertion, circulation, and exit. This
study focuses on the insertion phase, which is con-
sidered the most critical, as it requires an immedi-
ate decision: the autonomous vehicle must determine
whether to merge into the circulating flow or yield
to vehicles already in the roundabout. This decision
heavily depends on the ability to reliably predict the
trajectories of nearby vehicles.
In the literature, trajectory prediction methods are
generally categorized into two main groups: para-
metric and non-parametric approaches. Parametric
approaches rely on simplified physical motion mod-
els, such as constant velocity or constant accelera-
tion models (Schubert et al., 2008), kinematic bicy-
cle models (Kuwata et al., 2008), or dynamic bicycle
models (Brannstrom et al., 2010). While these models
can be effective in simple contexts, they fail to capture
the complexity of maneuvers typically encountered in
roundabouts. They are based on idealized assump-
tions that do not fully account for vehicle kinematics
or the variability of human driving behavior.
Non-parametric approaches, on the other hand,
employ machine learning and deep learning tech-
niques (Huang et al., 2022; Wang et al., 2023).
Several studies utilize Recurrent Neural Networks
(RNNs), particularly Long Short-Term Memory
(LSTM) architectures (Altch
´
e and de La Fortelle,
380
Bougherara, S., Arezki, H., Sentouh, C., Floris, J. and Popieul, J.-C.
Adaptive Trajectory Prediction in Roundabouts Using Moving Horizon Estimation.
DOI: 10.5220/0013835800003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 380-386
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

2017; Park et al., 2018), to model the temporal dy-
namics of vehicle trajectories. Although powerful,
these methods require large amounts of training data
and considerable computational resources, which in-
crease processing time and hinder real-time decision-
making. Other works have proposed more elaborate
behavioral models. For example, Wiest et al. (Wiest
et al., 2012) used Gaussian regression to model the
probabilistic distribution of past trajectories, while
Firl et al. (Firl et al., 2012) employed a hidden
Markov process combined with a reward function to
determine the optimal strategy through dynamic pro-
gramming. However, these methods often assume rel-
atively deterministic motion patterns and struggle to
represent the irregular behavior of human drivers in
complex environments.
In contrast to the above approaches, several prob-
abilistic methods have been developed to explicitly
account for uncertainty in trajectory prediction. The
Extended Kalman Filter (EKF) (Guo et al., 2018) has
been widely used for state estimation but suffers from
linearization errors, especially in nonlinear scenar-
ios such as roundabouts. Monte Carlo-based meth-
ods, such as particle filters (Gustafsson, 2010), allow
for the representation of non-Gaussian distributions
and can model complex interactions between vehi-
cles (Lef
`
evre et al., 2014). However, they are compu-
tationally expensive, sensitive to particle degeneracy,
and poorly suited for real-time applications. Another
approach involves the use of stochastic reachable sets,
which aim to encapsulate all possible trajectories un-
der uncertainty while respecting dynamic and envi-
ronmental constraints (Du Toit and Burdick, 2011).
While this method provides formal safety guarantees,
it tends to be overly conservative and difficult to im-
plement online due to its computational complexity.
It is important to note that most of these approaches
have been applied in relatively simple scenarios, such
as highway driving or linear merging situations. In
contrast, our study focuses on a more complex envi-
ronment: predicting the trajectories of vehicles oper-
ating within a roundabout.
To overcome the limitations of existing methods,
Moving Horizon Estimation (MHE) emerges as a ro-
bust and promising alternative for trajectory predic-
tion. Unlike traditional filters that only consider the
current state, MHE employs a sliding window of past
observations and solves a constrained optimization
problem at each step. This approach enables more
accurate state estimation and facilitates the handling
of physical constraints. Moreover, MHE naturally ac-
commodates nonlinear models without relying on lin-
earization approximations and provides explicit un-
certainty quantification. These features make it par-
ticularly well-suited for trajectory prediction in com-
plex urban environments, such as roundabouts.
In this paper, we propose a novel trajectory pre-
diction framework based on Moving Horizon Estima-
tion (MHE), coupled with a nonlinear kinematic bicy-
cle model, for vehicles navigating roundabouts. The
approach can be integrated into a multi-level coop-
erative architecture between human drivers and auto-
mated vehicles to handle complex situations such as
roundabouts. Our method leverages MHE’s robust-
ness in state estimation and employs model propaga-
tion for short-term trajectory forecasting.
Simulation results demonstrate significant im-
provements in prediction accuracy and robustness
compared to Extended Kalman Filter (EKF)-based
approaches, confirming the effectiveness of MHE in
handling the complex dynamics and uncertainties in-
herent to roundabout scenarios.
The remainder of this paper is organized as fol-
lows: Section 2 introduces the kinematic bicycle
model used for trajectory prediction. Section 3
presents the proposed MHE-based prediction frame-
work. Section 4 discusses the experimental results
and provides a comparison with the baseline EKF-
based methods. Finally, Section 5 concludes the paper
and outlines directions for future research.
2 VEHICLE MODEL
To represent the motion of surrounding vehicles in
a roundabout, we use a nonlinear kinematic bicycle
model that captures both longitudinal and lateral ve-
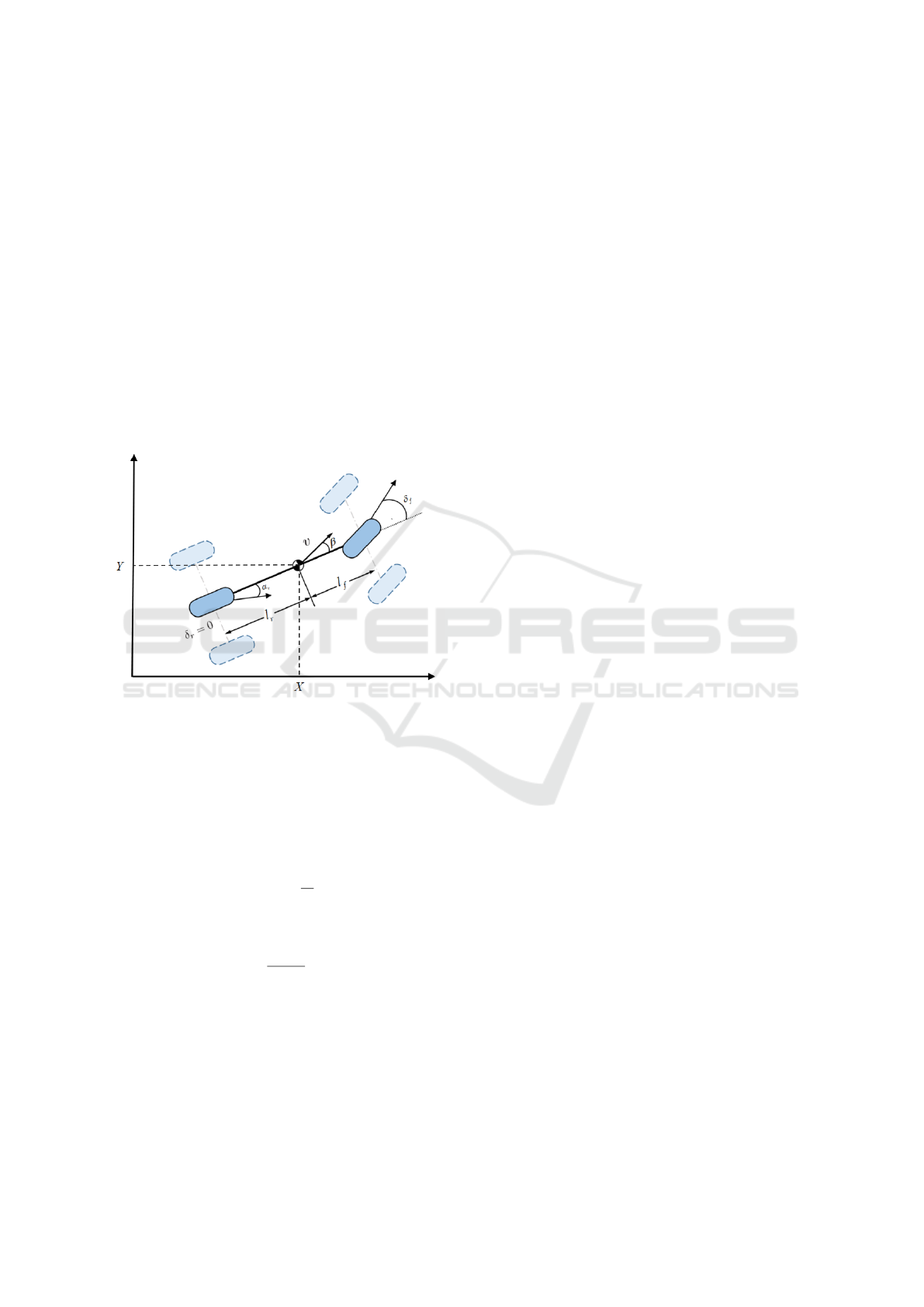
hicle dynamics from (Rajamani et al., 2020). Figure 1
illustrates the structure and geometric parameters of
the kinematic bicycle model. The vehicle model is a
single-track model, where the two axles are aligned
and steering is applied only to the front wheel. We
define the system state vector as:
x =
X Y ψ v
T
Where X is the longitudinal vehicle position, Y is the
lateral vehicle position, ψ is the vehicle yaw angle,
and v is the speed of the vehicle. Based on the ge-
ometry of the model in Figure 1, the continuous-time
nonlinear state dynamics are written as:
˙x =
vcos(ψ + β)
vsin(ψ + β)
v
l
r
sin(β)
a
(1)
with
β = tan
−1
l
r
l
f
+ l
r
tan(δ
f
)
Adaptive Trajectory Prediction in Roundabouts Using Moving Horizon Estimation
381
with β is the slip angle at the center of mass, account-
ing for the orientation difference between the velocity
vector and the vehicle’s longitudinal axis. δ
f
is the
front steering angle. The constants l
f
and l
r
represent
the distances from the center of mass to the front and
rear axles, respectively. The output of the system is
given by:
y = Cx, with C =
1 0 0 0
0 1 0 0
Positions X and Y are obtained through vehicle-to-
vehicle (V2V) communication. Finally, we assume
that the rear wheels are not steerable (δ
r
= 0), as is
the case in most standard passenger vehicles, and that
the acceleration a is either measured or estimated sep-
arately.
Figure 1: Kinematic bicycle model.
The discrete-time nonlinear kinematic bicycle
model is obtained by applying Euler discretization
with a fixed time step ∆t = 0.1 seconds to the
continuous-time dynamics:
x
k+1
= f (x
k
,u
k
)
x
k+1
=
x
k
+ ∆t · v
k
cos(ψ
k
+ β
k
)
y
k
+ ∆t · v
k
sin(ψ
k
+ β
k
)
ψ
k
+ ∆t ·
v
k
l
r
sin(β
k
)
v
k
+ ∆t · a
k
(2)
with
β
k
= tan
−1
l
r
l
f
+ l
r
tan(δ
f ,k
)
3 PROPOSED METHODOLOGY
As emphasized in the introduction, the insertion phase
in roundabouts requires fast and accurate predic-
tion of surrounding vehicle trajectories to enable safe
decision-making. To address the challenge of trajec-
tory prediction in roundabouts, we propose a frame-
work that combines model-based estimation and pre-
diction. A nonlinear kinematic bicycle model is used
to represent vehicle dynamics, offering a good trade-
off between accuracy and computational efficiency,
especially for curved trajectories. For state estima-
tion, we adopt Moving Horizon Estimation (MHE),
which outperforms traditional filters like the EKF by
optimizing over a sliding window and directly han-
dling nonlinearities and constraints, thus improving
robustness to noise, model mismatches, and sudden
changes.
MHE is based on the idea of minimizing a
quadratic estimation cost function defined on a back-
ward sliding window composed of a finite number
of time stages, which will be denoted by the integer
N
e
≥ 1. To this end, we define the standard quadratic
objective function:
J
N
e
t
( ˆx
t−N
e
) = µ
|
ˆx
t−N
e
− ¯x
t−N
e
|
2
η
N
e
+ ν
t−1
∑
i=t−N
e
η
t−1−i
y
i
− h( ˆx
i|t
,0)
2
(3)
where η ∈ (0,1) and µ,ν > 0 under the con-
straints:
ˆx
i+1|t
= f ( ˆx
i|t
,0), i = t − N
e
,...,t − 1 (4)
and thus ˆx
t−N
e
+1|t
,..., ˆx
t|t
are generated by ˆx
t−N
e
|t
.
We denote by MHE
N
e
what results from the mini-
mization of the cost function (3) as follows:
ˆx
0|t
∈
n
argmin
ˆx
0
∈X
J
t
t
( ˆx
0
)s.t. (4)
holds for t = 1,...,N
e
o
ˆx
t−N
e
|t
∈
n
argmin
ˆx
t−N
e
∈X
J
N
e
t
( ˆx
t−N
e
)s.t. (4)
holds for t = N
e
+ 1,N
e
+ 2,...
o
together with (4), which provides ˆx
t|t
. For further ease
of presentation, note that the cost function is given by:
J
t
t
( ˆx
0
) = µ| ˆx
0
− ¯x
0
|
2
η
t
+ ν
t−1
∑
i=0
η
t−1−i
y
i
− h( ˆx
i|t
,0)
2
(5)
for all t ≤ N
e
.
The trajectory of a tracked vehicle is typically pre-
dicted using model-based propagation. This approach
is consistent with the vehicle’s dynamics, as defined
by the discrete-time nonlinear model (2), and enables
accurate state prediction when future control inputs
u
k+i
(acceleration and steering angle) are known or
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
382

can be reasonably estimated. Moreover, it inherently
respects the physical constraints of the system. An
additional key advantage lies in its computational effi-
ciency: the recursive computation of future states us-
ing the dynamic model can be performed with min-
imal computational cost, making it well-suited for
real-time applications in embedded systems. Given
the discrete-time nonlinear model (2), the predicted
trajectory over a prediction horizon of N
p
steps is ob-
tained recursively as follows:
ˆx
k+1|k
= f ( ˆx
k
,u
k
),
ˆx
k+2|k
= f ( ˆx
k+1|k
,u
k+1
),
.
.
.
ˆx
k+N
p
|k
= f ( ˆx
k+N
p
−1|k
,u
k+N
p
−1
),
(6)
where ˆx
k+i|k
denotes the predicted state at time k + i
based on information available at time k, and N
p
is the
prediction horizon.
4 EXPERIMENTAL VALIDATION
To validate the applicability of our trajectory pre-
diction approach in a realistic environment, we per-
formed simulations using the SHERPA dynamic driv-
ing simulator of the LAMIH laboratory. SHERPA is a
high-fidelity platform designed to reproduce real-time
vehicle dynamics. The experimental scenario consists
of a single vehicle navigating a multilane roundabout.
The objective is to predict the future trajectory of this
vehicle using only its current and past position mea-
surements, while accounting for the curved motion
typical of roundabout driving. This setup enables a
realistic evaluation of our prediction framework. Fig-
ure 2 shows both the SHERPA simulator and a visual
representation of the roundabout scenario used during
testing.
Figure 2: SHERPA dynamic driving simulator on the
roundabout scenario.
Utilizing the MATLAB Yalmip toolbox, the LMI-
based tuning procedure (Arezki et al., 2023) provides
the following parameters in (3), which are fixed to
µ = 0.01, ν = 1, and η = 0.9. The estimation hori-
zon is set to N
e
= 10, meaning the MHE optimization
is performed over a backward sliding window of 10
time steps. Additionally, the prediction horizon is set
to N
p
= 10, enabling the computation of future state
trajectories over 10 steps ahead.
Given the fixed sampling time of ∆t = 0.1 sec-
onds, both horizons correspond to a one-second dura-
tion. This setup allows the MHE framework to simul-
taneously benefit from a sufficient estimation memory
and a meaningful short-term forecast interval. These
parameters were chosen to ensure the robustness and
accuracy of the proposed approach. The initial esti-
mated state is set to
0 0 0 0
⊤
.
Simulation runs are conducted with both system
and measurement noise, generated according to zero-
mean Gaussian distributions with a covariance of
0.01. For comparison purposes, an Extended Kalman
Filter (EKF) was implemented using the same non-
linear kinematic bicycle model. The EKF was initial-
ized with the same initial estimate as the MHE, and
the process and measurement noise covariances were
selected based on model assumptions and sensor char-
acteristics. The measurement noise covariance matrix
R was constructed using the known standard devia-
tions of the position measurements: 1.5 m for the lon-
gitudinal position and 0.4 m for the lateral position:
R =
(1.5)
2
0
0 (0.4)
2
The process noise covariance matrix Q was set em-
pirically to reflect reasonable uncertainty in state evo-
lution, particularly during maneuvers. We assumed
higher uncertainty in velocity and moderate noise in
position and yaw:
Q = diag(0.01, 0.01, 0.001, 0.05)
These values were tuned to ensure stable filter behav-
ior and allow for a fair comparison with the MHE-
based approach under the same simulation conditions.
4.1 Scenario 1: Without Maneuvering
In this scenario, the vehicle circulates within the
roundabout without executing any maneuvers. It fol-
lows a trajectory with constant acceleration, indicat-
ing the absence of significant braking or acceleration
throughout the sequence.
The scenario is illustrated in the following video:
Watch the video on YouTube. Figure 2 shows, on the
left, a thumbnail from the video, and on the right, the
SHERPA simulator equipped with a real vehicle used
for testing.
Trajectory predictions over a one-second horizon,
computed according to the recursive formulation in
Equation (6), are presented in Figures 3 and 6. In
Adaptive Trajectory Prediction in Roundabouts Using Moving Horizon Estimation
383
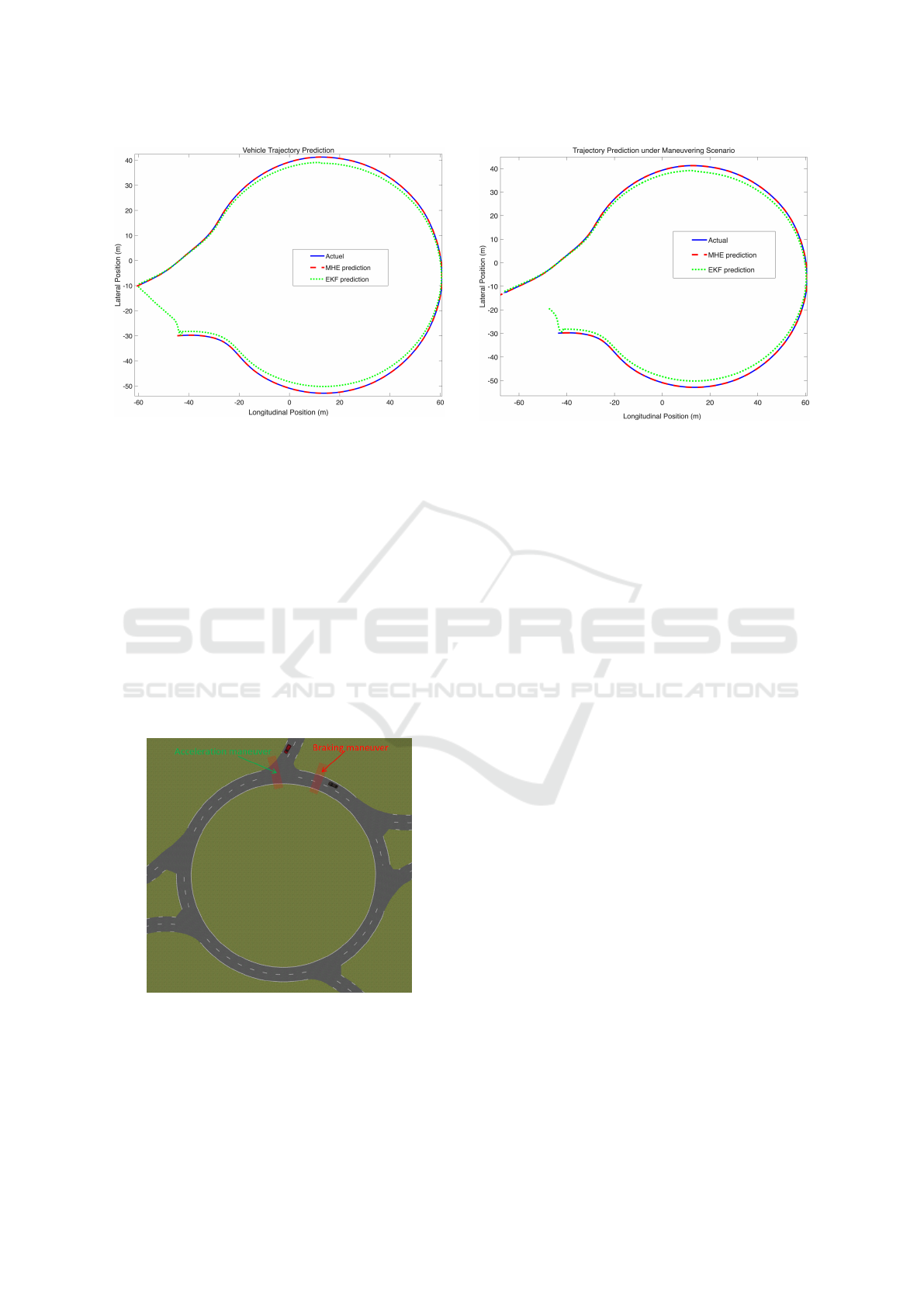
Figure 3: Comparison of state prediction performance be-
tween MHE and EKF without manoeuvers.
the absence of maneuvers, the MHE consistently pro-
vides predictions that closely match the actual states
obtained from the SHERPA simulator, particularly for
velocity and yaw angle. The EKF exhibits larger devi-
ations, especially during the initial acceleration phase.
These results highlight the superior accuracy and ro-
bustness of MHE, even under steady driving condi-
tions.
4.2 Scenario 2: With Maneuvering
In this scenario, the ego vehicle performs two key ma-
neuvers in response to the presence of a red vehicle
ahead.
Figure 4: Illustration of the vehicle maneuvers in a round-
about scenario. The ego vehicle performs a braking maneu-
ver (in red) to avoid a slower vehicle ahead, followed by an
acceleration maneuver (in green) once the path is clear.
• First, upon detecting the red vehicle, it initiates
a braking maneuver, reducing its speed sharply
Figure 5: Comparison of state prediction performance be-
tween MHE and EKF under manoeuvers
from 30 km/h to 10 km/h in a short time window
in order to maintain a safe distance. This decel-
eration occurs between t = 20 s and t = 22 s, fol-
lowing a constant cruising speed of 30km/h from
t = 0s to t = 20 s.
• Then, once the red vehicle is overtaken or is
no longer obstructing the lane, the ego vehicle
initiates an acceleration maneuver, increasing its
speed from 10km/h to 40 km/h over the interval
t = 22s to t = 30 s.
The speed profile, including the abrupt braking and
smooth re-acceleration phases, was modeled in the
SHERPA simulator using custom event triggers that
modify the vehicle’s control inputs in real time, as
illustrated in Fig. 4. The complete scenario can be
viewed in the following video: Watch the video on
YouTube
Trajectory predictions over a one-second hori-
zon under the maneuvering scenario (Figures 5
and 7), which includes abrupt acceleration and brak-
ing events, show that the MHE maintains accurate
tracking throughout the entire trajectory. The EKF,
however, exhibits notable divergence, particularly in
the lateral and longitudinal positions. These observa-
tions highlight the superior robustness and adaptabil-
ity of MHE, even under dynamic and highly nonlinear
vehicle behaviors.
To compare the performance of the two trajectory
prediction methods, we conducted an analysis based
on the Root Mean Square Error (RMSE) computed
across multiple state variables. The results, summa-
rized in Table 1, demonstrate the superior accuracy of
the MHE approach compared to the EKF, with signif-
icant improvements observed across all metrics.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
384
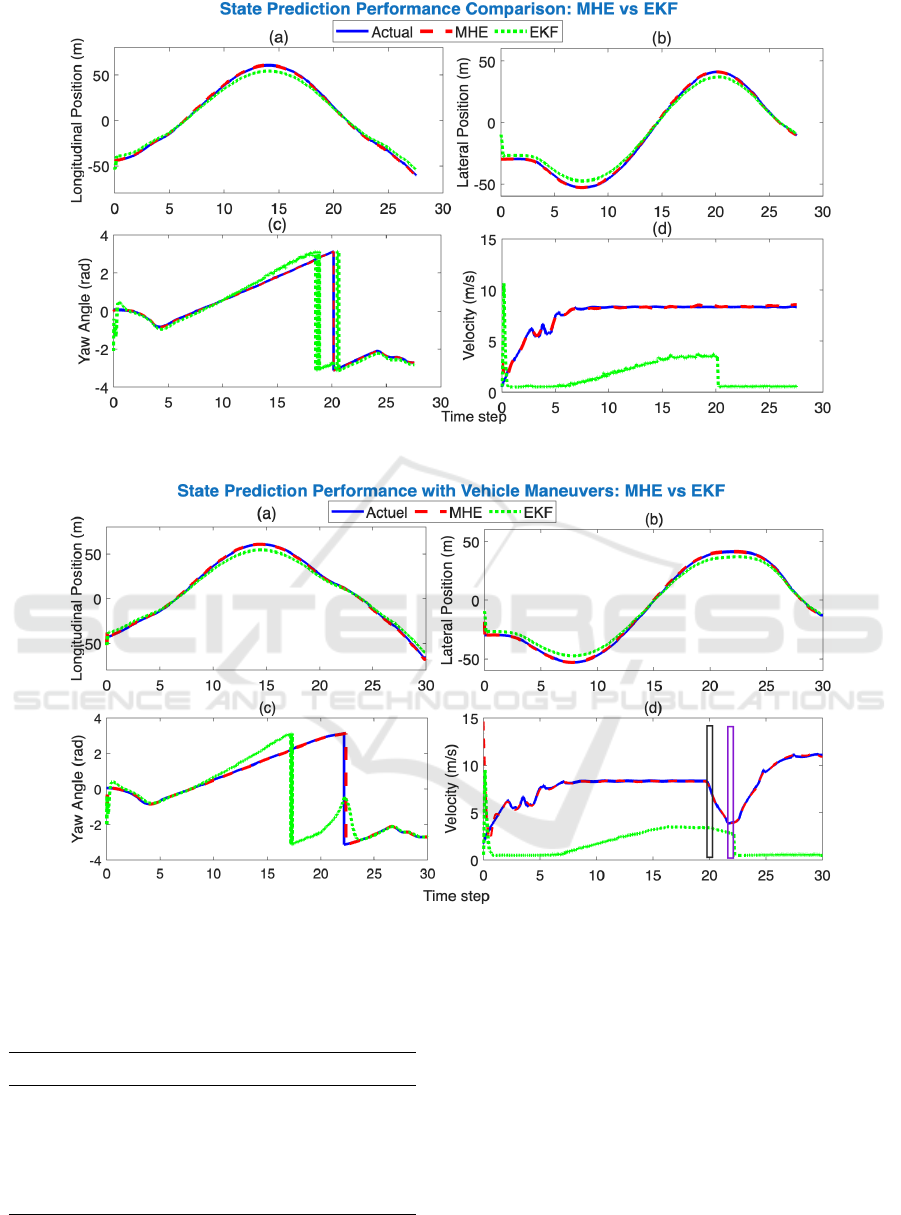
Figure 6: Comparison of state prediction performance between MHE and EKF without manoeuvers.
Figure 7: Comparison of state prediction performance under vehicle maneuvers. The ego vehicle performs two maneuvers:
(1) a braking phase between t = 20 s and t = 22s in response to a slower vehicle ahead (highlighted in black), and (2) an
acceleration phase from t = 22 s to t = 30 s after overtaking (highlighted in violet).
Table 1: RMSE Comparison between MHE and EKF.
Variable MHE EKF Gain (%)
Long. Pos. (m) 0.8790 3.8908 +77.41
Lat. Pos. (m) 0.7133 3.5648 +79.99
Yaw (rad) 0.4845 2.1032 +76.96
Velocity (m/s) 0.5132 6.6501 +92.28
5 CONCLUSION
This work presented a model-based trajectory predic-
tion framework tailored to the complex dynamics of
vehicle motion in roundabouts. By integrating a non-
linear kinematic bicycle model with Moving Horizon
Estimation (MHE), we achieved accurate and robust
state predictions, even under maneuvering conditions.
The comparative analysis with the EKF demonstrated
that MHE provides significant improvements in esti-
Adaptive Trajectory Prediction in Roundabouts Using Moving Horizon Estimation
385

mation accuracy and robustness to abrupt behavioral
changes, particularly in lateral and longitudinal posi-
tions, velocity, and yaw angle.
The proposed trajectory prediction framework
lays the groundwork for more advanced decision-
making modules. As a future extension, the pre-
dicted trajectories will be integrated into a risk-aware
decision-making system during the insertion phase
into the roundabout. This integration will subse-
quently be extended to the circulation and exit phases.
Such an approach will enable proactive navigation
strategies and enhance safety in complex, dynamic
environments, where anticipating the behavior of sur-
rounding vehicles is critical.
REFERENCES
Altch
´
e, F. and de La Fortelle, A. (2017). An lstm network
for highway trajectory prediction. In 2017 IEEE 20th
International Conference on Intelligent Transporta-
tion Systems (ITSC), pages 353–359. IEEE.
Arezki, H., Zemouche, A., Alessandri, A., and Bagner-
ini, P. (2023). Lmi design procedure for incremen-
tal input/output-to-state stability in nonlinear systems.
IEEE Control Systems Letters, 7:3403–3408.
Bellingard, K. (2023). Prise de d
´
ecision s
ˆ
ure et robuste
pour les v
´
ehicules autonomes en milieu urbain haute-
ment dynamique et contraint. Th
`
ese de doctorat, Uni-
versit
´
e de Technologie de Compi
`
egne.
Benloucif, M. A. (2018). Coop
´
eration homme-machine
multi-niveau entre le conducteur et un syst
`
eme
d’automatisation de la conduite. Th
`
ese de doctorat,
Universit
´
e de Valenciennes et du Hainaut-Cambr
´
esis.
ffNNT : 2018VALE0012, fftel-01860221f.
Brannstrom, M., Coelingh, E., and Sj
¨
oberg, J. (2010).
Model-based threat assessment for avoiding arbitrary
vehicle collisions. IEEE Transactions on Intelligent
Transportation Systems, 11(3):658–669.
Du Toit, N. E. and Burdick, J. W. (2011). Probabilistic col-
lision checking with chance constraints. IEEE Trans-
actions on Robotics, 27(4):809–815.
Firl, J., St
¨
ubing, H., Huss, S. A., and Dietmayer, K. (2012).
Predictive maneuver evaluation for enhancement of
car-to-x mobility data. In 2012 IEEE Intelligent Ve-
hicles Symposium, pages 558–564. IEEE.
Guo, C., Sentouh, C., Soualmi, B., Hau
´
e, J.-B., and Popieul,
J.-C. (2018). Adaptive vehicle longitudinal trajectory
prediction for automated highway driving. In IEEE
Intelligent Vehicles Symposium (IV).
Gustafsson, F. (2010). Particle filter theory and practice
with positioning applications. IEEE Aerospace and
Electronic Systems Magazine, 25(7):53–82.
Huang, Y., Du, J., Yang, Z., Zhou, Z., Zhang, L., and Chen,
H. (2022). A survey on trajectory-prediction methods
for autonomous driving. IEEE Transactions on Intel-
ligent Vehicles, 7(3):258–277.
Kuwata, Y., Teo, J., Karaman, S., Fiore, G., Frazzoli, E.,
and How, J. P. (2008). Motion planning in complex
environments using closed-loop prediction. In AIAA
Guidance, Navigation and Control Conference and
Exhibit.
Lef
`
evre, S., Vasquez, D., and Laugier, C. (2014). A sur-
vey on motion prediction and risk assessment for in-
telligent vehicles. Robotics and Autonomous Systems,
58(9):1348–1359.
Oudainia, M. R. (2023). Contr
ˆ
ole partag
´
e adaptatif et
´
elaboration de strat
´
egies de conduite personnalis
´
ees
pour le v
´
ehicule automatis
´
e : une approche par
apprentissage progressif. Th
`
ese de doctorat, Uni-
versit
´
e Polytechnique Hauts-de-France. ffNNT :
2023UPHF0038, fftel-04466406f.
Park, S. H., Kim, B., Kang, C. M., Chung, C. C., and
Choi, J. W. (2018). Sequence-to-sequence prediction
of vehicle trajectory via lstm encoder-decoder archi-
tecture. In 2018 IEEE Intelligent Vehicles Symposium
(IV), pages 1672–1678. IEEE.
Rajamani, R., Jeon, W., Movahedi, H., and Zemouche, A.
(2020). Vehicle motion estimation using a switched
gain nonlinear observer. In 2020 American Control
Conference (ACC), pages 3047–3052. IEEE.
Schubert, R., Richter, E., and Wanielik, G. (2008). Com-
parison and evaluation of advanced motion models for
vehicle tracking. In Proceedings of the 11th Interna-
tional Conference on Information Fusion.
Wang, Z., Liu, X., and Wu, Z. (2023). Design of unsignal-
ized roundabouts driving policy of autonomous vehi-
cles using deep reinforcement learning. World Elec-
tric Vehicle Journal, 14(2):52.
Wiest, J., Hoffken, M., Kreßel, U., and Dietmayer, K.
(2012). Probabilistic trajectory prediction with gaus-
sian mixture models. In 2012 IEEE Intelligent Vehi-
cles Symposium, pages 141–146. IEEE.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
386
