
On the Synthesis of Stable Switching Dynamics
to Approximate Limit Cycles of Nonlinear Oscillators
Nils Hanke
a
, Zonglin Liu
b
and Olaf Stursberg
c
Control and System Theory, EECS Dept., University of Kassel, Germany
Keywords:
Oscillators, Limit Cycles, Approximation, Switching Affine Systems, Stability.
Abstract:
This paper presents a novel method for approximating periodic behavior of nonlinear systems by use of switch-
ing affine dynamics. While previous work on approximating limit cycles by switching systems has been re-
stricted t o state space partitions with only two regions or approximations in the plane, this study employs more
general partitions in higher-dimensional spaces as well as external signals to develop a scheme for synthesiz-
ing models with guaranteed existence of a globally stable limit cycle. The synthesis approach is formulated
as a constrained numeric optimization problem, starting from sampled nonlinear dynamics data. I t minimizes
deviations between this data and the switching affine model’s limit cycle, while satisfying constraints to ensure
global stabilit y. The principle and effectiveness of the proposed method is illustrated through examples.
1 INTRODUCTION
Periodic behav ior is a fundamental phenomenon ob-
served across numer ous application do mains, includ-
ing biology, engineer ing, and physics (Teplinsky
and Feely, 2008; Mirollo and Strogatz, 1990; Pe-
terchev and Sanders, 2003). While nonlinear oscilla-
tor models such as Kuramoto, Van-der-Pol, FitzHugh-
Nagumo, Duffing, or Goodwin oscillators (Kuramoto,
2005; Josh i et al., 2016; Gaiko, 2011; D¨orfler and
Bullo, 2014; Kudry ashov, 2021; Gonze and Ruoff,
2021; Atherto n and Dorrah, 19 80) ar e widely u sed
to d e scribe periodic behavior, the an a lysis of these
models is limited: Specifically, the characteriz ation
and ana lysis of limit cycles, including conditions for
uniqueness and stability, is often restricted to special
cases. A central challenge in studying such behavior
is to approximate the underlying oscillatory dynam-
ics with an analytically tractable system class which
allows to rigorously analyze its properties. Exist-
ing data-driven approach es, such as machine learn-
ing or hybrid system identification, can approximate
periodic behavior (X u and Luo, 2019), but they are
not designe d to allow for rigorous analysis of proper-
ties of limit cycles. This gap hinde rs the systematic
study of oscillatory phenomena in applications such
as, e.g., the investigation of circadian rhythms in bio-
logical systems (Werckenth in et al., 2020), where un-
a
https://orcid.org/0009-0008-8940-2677
b
https://orcid.org/0000-0002-0196-9476
c
https://orcid.org/0000-0002-9600-457X
derstandin g stability, phase shifts, and synchroniza-
tion is essential.
To simplify the model analysis, switching or
piecewise-affine systems (PAS) have proven effective
in appr oximating nonlin e ar dy namics (Paoletti et al.,
2007; Lauer et al., 2011). This is primarily due to
the facts that (1.) the analytic solution of piecewise-
affine systems exists for each region of the parti-
tioned state space, and (2.) the approximation qual-
ity can be tuned through adapting the partitioning and
parametriza tion. Specifically with respect to the ap-
proxim ation of nonlinear systems with periodic tra-
jectories, the work in (Lum and Chua, 1991; Freire
et al., 1998) proposed conditions f or the existence of
limit cycles of PAS (with two-r egio n partitions) in R
2
.
The uniquene ss and stability of these limit cycles are
further examined in (Coll et al., 200 1; Llibre et al.,
2008). These results are then adopted in (Kai and Ma-
suda, 2012) to synthesize PAS with stable limit cycles
in R
2
, while the work in (Hanke and Stursb e rg, 2023;
Hanke e t al., 2024) further developed algorithms to
generate p la nar switching affine systems to approxi-
mate given limit cycles with guara ntees of uniqueness
and local stability. However, there the use of only two
affine dynamics and a single separating line limits the
approximation quality. A comprehensive review of
the conditions of the existence of limit cycles in pla-
nar piecewise-linear systems can be found in (Freire
et al., 1998) or in Chapter 5.1 of (Bernardo et al.,
2008). The recent work (Hanke et al., 2025) improved
the approximation quality by employing multiple par-
titions, however the proposed result is still lim ited to
Hanke, N., Liu, Z. and Stursberg, O.
On the Synthesis of Stable Switching Dynamics to Approximate Limit Cycles of Nonlinear Oscillators.
DOI: 10.5220/0013835000003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 509-516
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
509

the R
2
, and it lacks the guarantee o f global stability
of the limit cycle.
This paper extends the approaches in literature to
higher-dimensional spaces by leveraging the contrac-
tion p roperty outlined in (Pavlov et al., 2007) to gen-
erate PAS with globally stable limit cycles. A novel
method is proposed for partitioning the state space
and sy nthesizing affine dynam ics within each region,
ensuring both global stability and adjustable approxi-
mation quality.
Section 2 first introduces properties of PAS which
are essential for ensuring high approximation quality.
Section 3 proposes rules for partitioning state spaces
of arbitrary dimensions and for synthesizing PAS with
desired p roperties by use of optimiza tion. An illustra-
tive numerical example is presented in Sec. 4, includ-
ing cases in 2 and 3 dimen sio ns, before conclusions
and an outlook are provided in Sec. 5.
2 PROBLEM DESCRIPTION
The objective of the procedure to be proposed in this
paper is to reconstruct limit cycles of a broad class of
oscillatory systems with the following property: T he
underlying nonlinear dynamics (defined in R
n
x
) gen-
erates a smo oth and stab le limit cycle which 1.) is
embedd ed in an (n
x
− 1)-dim. manifold, 2.) oscillates
around a virtual center point, and 3.) does not show
strong twisting nor points of intersection with itself.
Assume that an or dered set F := { ˜x
1
, ˜x
2
, .. . , ˜x
n
F
}
of different state samples ˜x
i
∈ R
n
x
is taken along
the limit cycle of the n onlinear dynamics. For the
sake of clarity, it is assumed that the sampling time
∆t is constant along the cycle, while the method in-
troduced later is also applicable to cases with non-
unifor m sampling times. The sampling is assumed to
be dense in the sense that n
F
is much larger than n
x
,
i.e., the sampling time ∆t is much smaller than the pe-
riod T = n
F
·∆t of the limit cycle, and ∆t < 1 applies.
Given F, the o bjective of this paper is to propose
a method to construct a dynamic model approximat-
ing the limit cycle of the non linear dynamics wh ile
preserving its properties – for this purpose, the class
of switching affine systems is chosen: Let x(t) ∈ R
n
x
denote the state at time t ∈ R and u(t) ∈ R a scalar in-
put signal, which is multiplied by a vector B ∈ R
n
x
×1
.
Assume th at the state space R
n
x
is partitioned into
finitely many polytop es P
i
⊆ R
n
x
, i ∈ {1, . . . , n
P
},
which are parametrized by C
i
∈ R
1×n
x
, d
i
∈ R, and
C
n
P
+1
= C
1
, d
n
P
+1
= d
1
accordin g to:
P
i
:={x∈R
n
x
|C
i
x≥d
i
,C
i+1
x<d
i+1
},
n
P
[
i=1
P
i
=R
n
x
. (1)
Note that this definition is particular in the sen se that
the number of P
i
and bound ing planes (C
i
, d
i
) is both
n
p
, as required for the procedure to be proposed. For
pairs (A
i
, b
i
) of A
i
∈ R
n
x
×n
x
and b
i
∈ R
n
x
×1
, the affine
dynamics assigned to each P
i
is:
˙x(t) = A
i
x(t) + b
i
+ Bu(t), for x(t) ∈ P
i
. (2)
Consider a set of switching tim e s T
k
= {t
0
,t
1
, . . .} with
the initial time t
0
= 0. A trajectory ¯x
[0,∞[
of (2), start-
ing from the initial state x(t
0
) = x
0
, contains the state
evolution for a sequence of phases [t
k
,t
k+1
] in between
two successive switching times. In each phase with
t ∈ [t
k
,t
k+1
], the pair (A
i
, b
i
) in (2) is activated for the
index i for which x(t) ∈ P
i
applies. A limit cycle, as a
particular trajectory of (2), is defined a s follows:
Definition 1. Limit Cycle
A trajectory ¯x
∗
[0,∞[
of (2) is called limit cycle, if a finite
period T ∈ R
>0
exists such that for any po int x(t) ∈
¯x
∗
[0,∞[
, t ∈ R
≥0
it applies that: x(t + T) = x(t).
Definition 2. Stability of a Limit Cycle
A limit cycle ¯x
∗
[0,∞[
of (2 ) is called globally stable, if
every trajectory converges to wa rds ¯x
∗
[0,∞[
indepen dent
of the initialization x(0) = x
0
∈ R
2
.
The identification of a model of type (2) from F
requires to synthesize the following parameters: 1.)
the number n
P
of elements P
i
of the state space parti-
tion, 2.) the boundar ies C
i
x = d
i
of the P
i
, 3.) the pair
of matrices (A
i
, b
i
) for each P
i
, and 4.) the signal u(t)
together with the vector B. To match the p roperties
assumed for the limit cycle of the nonlinear system,
the particular synthesis requireme nts are:
• The evolution of (2) also forms a limit cycle ¯x
∗
[0,∞[
,
which is globally stable according to Def. 2.
• The period of the limit cycle ¯x
∗
[0,∞[
is T = n
F
· ∆t.
• The limit cycle ¯x
∗
[0,∞[
tracks the sample points in
F as well as p ossible.
Switching affine systems are a promising candid a te
for such an approximation, since the number of pa-
rameters in each P
i
is small and th e dynamics is rela-
tively simple to analyze. In particular, if the con sid -
ered dynamics is strongly nonlinear along the cycle,
the approximation with affine dynam ic s in restricted
regions is well justified, while freedom in choosing
the P
i
(wrt. number and positioning) allows in princi-
ple to obtain arbitr a rily good approximations. How-
ever, most existing work on approximating limit cy-
cles is limited to either two regions in the plane, o r
provides only local stability guarantees. To address
these limitations, the following exposition uses the
concept of contractivity to obtain a synthesis proce-
dure achieving the named properties of ¯x
∗
[0,∞[
by nu-
merical optimization.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
510
3 SYNTHESIS OF CONTRACTIVE
SWITCHING AFFINE SYSTEMS
3.1 Partitioning of the State Space
In order to fully utilize the degrees of freedom of-
fered by (2) in assigning different affine dynamics to
the r egions when tracking the set of samples F :=
{ ˜x
1
, ˜x
2
, . . . , ˜x
n
F
}, a method for partitio ning the state
space in any dimension n
p
∈ [2, n
F
− 1] is introduced
first. This method ensu res that the resulting partition
satisfies the conditions in (1). Specifically, the cases
of n
x
= 2, n
x
= 3, and n
x
> 3 are discussed separately
in the sequel.
Case n
x
= 2
: Let a cen te r point x
s
of all points in
F be determined by:
x
s,[q]
=
1
2
max
l∈{1,...,n
F
}
˜x
l,[q]
− min
l∈{1,...,n
F
}
˜x
l,[q]
(3)
for both dimensions q ∈ {1, 2}. By assuming that x
s
does not coincide with any point in F, a set of n
p
sample points ˆx
1
, . . . , ˆx
n
p
is selected from F, see Re-
mark 2 at the end of this subsection for more details.
Then, for e a ch point ˆx
i
, a unique line C
i
x = d
i
with
C
i
∈ R
1×2
, d
i
∈ R, can be determined, which contains
x
s
and ˆx
i
. Such a lin e then serves as the boundary be-
tween the regions P
i−1
and P
i
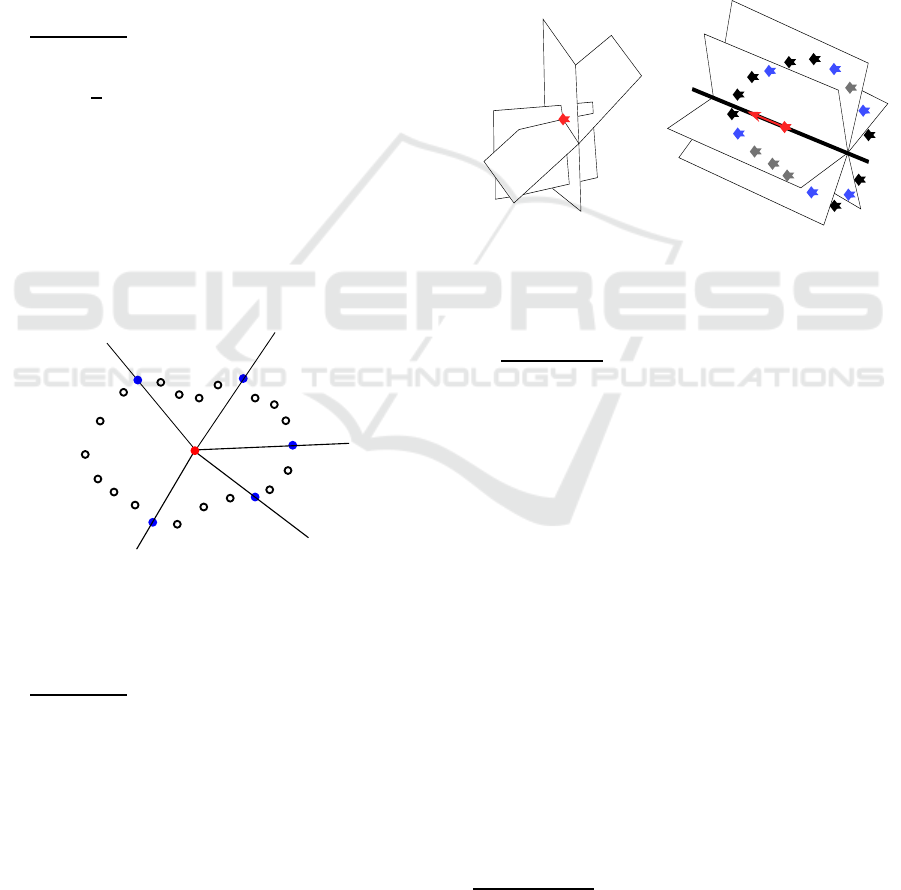
, as illustrated in Fig. 1.
x
s
ˆx
1
ˆx
2
ˆx
3
ˆx
4
ˆx
5
P
1
P
2
P
3
P
4
P
5
Figure 1: Based on F, the center point x
s
, and a set of se-
lected points ˆx
1
, . . . , ˆx
n
P
∈ F (each representing the first state
of any subset F
1
, . . . , F
n
P
along the limit cycle), the lines for
partitioning X into regions P
i
are determined.
Case n
x
= 3
: Let the center point x
s
again be de-
termined by (3). Then, a pla ne Ω
∗
x = ε
∗
with Ω
∗
∈
R
1×3
, ε
∗
∈ R, is determined by:
(Ω
∗
, ε
∗
) := a rg min
Ω,ε
n
F
∑
i=1
kΩ ˜x
i
− εk
2
, s.t. Ωx
s
= ε (4)
Based on the outcome of (4), a line:
Γ := {x ∈ R
3
| x = x
s
+ ηΩ
∗
, η ∈ R} (5)
which contains x
s
and shares the direction vector Ω
∗
is obtained. Note that the plane Ω
∗
x = ε
∗
contains the
center point x
s
, while the overall distance between the
sample p oints in F to the plane is minimized across
all possible values of Ω and ε. If no point in F is
contained
1
in Γ, a set of n
p
sample points ˆx
1
, . . . , ˆx
n
p
is selected from F. For each of these sam ple points
ˆx
i
, a unique plane containing ˆx
i
and the line Γ is de-
termined. If su ch a plane does not contain any other
sample p oint fr om F, th en it is assumed to constitute
the boundar y R
i−1,i
:= {x ∈ R
3
|C
i
x = d
i
} between two
adjacent regions P
i−1
and P
i
. In this way, a partition
which does not satisfy (1), as illu strated in Fig. 2a), is
avoided. An admissible partitioning from the afore-
mentioned procedure is shown in Fig. 2b).
a)
b)
x
s
x
s
Ω
∗
Γ
P
5
P
6
P
1
P
2
P
3
P
4
ˆx
1
ˆx
2
ˆx
3
ˆx
4
ˆx
5
ˆx
6
Figure 2: For n
x
= 3, the partitioning shown i n Fig. 2 a)
does not satisfy (1). In contrast, an admissible partition is
obtained by the considered procedure for the case i n Fi g. 2
b).
Case n
x
> 3:
Determine aga in x
s
, the vector Ω
∗
∈
R
1×n
x
, and the line Γ accor ding to ( 3) to (5). Let also
n
p
sample p oints ˆx
1
, . . . , ˆx
n
p
be selected fr om F. How-
ever, for any of these sample points ˆx
i
, a hyperplane
containing ˆx
i
and the line Γ (while being defined in
an n
x
− 1 dimensiona l subspace) is not unique. To re-
solve this issue, a set of linearly independent vectors
Ω
2
, . . . , Ω
n
x
−2
, Ω
j
∈ R
1×n
x
, ar e ide ntified, which have
to be linea rly independent of Ω
∗
. Based on these vec-
tors, a hyperplane Ψ can be determined in the n
x
− 2
dimensional subsp a ce by:
Ψ:={x ∈ R
n
x
|x = x
s
+η
1
Ω
∗
+
n
x
−2
∑
j=2
η
j
Ω
j
, η
j
∈ R}. (6)
Assume that Ψ does not contain any points from F,
then for ea ch sample point ˆx
i
, a unique hyperplane in
the n
x
− 1 d imensional subsp ace can be determined,
which contains Ψ and ˆx
i
. If such hyperplane does not
contain any o ther sample point from F , this hyper-
plane is then chosen to be the boundary R
i−1,i
:= {x ∈
R
n
x
|C
i
x = d
i
} between the regions P
i−1
and P
i
.
Remark 1 . The proposed procedure a-priori ex-
cludes sets F that are likely to yield poor approxi-
1
If this condition does not hold, one may resolve the
issue by slightly changing Ω
∗
.
On the Synthesis of Stable Switching Dynamics to Approximate Limit Cycles of Nonlinear Oscillators
511

mations. One of these c ases is sho wn in Fig. 3 a),
in which the condition is not satisfied that C
i
x = d
i
does only contain one sample point ˆx
i
and one lin e Γ.
The second case, shown in Fig. 3 b), correspon ds to
a limit cycle intersecting itself. While the proposed
partitioning procedure may succeed here, it becomes
clearly evident, e.g. for P
3
, that no affine system can
be found that adequately captures the opposing d irec-
tions of motion of the trajectories. This limitation mo-
tivates the exclusion of limit cycles with intersections,
as stated in Sec. 2.
x
1
x
1
x
3
x
2
x
2
a)
b)
x
s
x
s
P
1
P
2
P
3
P
4
ˆx
1
ˆx
2
Γ
Ω
∗
x = ε
∗
C
i
x = d
i
Figure 3: Types of sets F that are not suitable for the par-
titioning procedure under consideration: the case in a) fails
to meet the condition that C
i
x = d
i
does only contain a sam-
ple point ˆx
i
and Γ, while the case in b) is not feasible for
determination of A
3
, b
3
∈ P
3
and A
4
, b
4
∈ P
4
.
Remark 2. The n
p
sample points of the sequence
{ ˆx
i
}
n
p
i=1
with timestamps {
ˆ
t
i
}
n
p
i=1
are selected from F
such that all time intervals satisfy:
∆
ˆ
t
i
:= |
ˆ
t
i+1
−
ˆ
t
i
| < 1 ∀i ∈ {1, . . . , n
p
} (7)
with
ˆ
t
n
p
+1
≡ t
1
. While this selec tion is not strictly nec-
essary to partition the state space, it ena bles good ap-
proximation quality in the reconstructed limit cycle,
as will be discussed in Sec. 3.3.
3.2 Construction of the Dynamics
Assume that the number n
F
and the partition (1 ) into
P
i
are fixed. Accord ing to (Pavlov et al., 2007), the
switching affine system (2) is said to be contractive,
if the following is satisfied:
• Conditio n 1: A
i
x + b
i
= A
i+1
x + b
i+1
holds for
all x on the boundary C
i
x = d
i
and for all i ∈
{1, . . . , n
P
}, with A
n
p
+1
= A
1
and b
n
p
+1
= b
1
.
• Conditio n 2: A
T
i
Q + QA
i
≺ 0 holds for all i ∈
{1, . . . , n
P
} with a positive-definite matrix Q ≻ 0.
The first condition requ ires that the gradient of the
autonomous dynamic s on the switchin g b oundaries
must be continuous, while the second condition im-
plies the existence of a common Ly apunov function
in all regions. N ext, the important property of con-
tractivity is established, which underlies the sy nthesis
proced ure in this paper:
Lemma 1. (Contractive switching affine systems
(Demidovich, 1967; Pavlov et al., 2007)) I f the sys-
tem (2) is contractive with a non-zero vector B, then
for any piecewise continuous periodic signal u(t) with
a period T , the solution x(t), t ≥ 0 starting from an ar-
bitrary x(0 ) ∈ R
n
x
always converges to a unique limit
cycle with the same period T .
In order to enco de the requirement of continu-
ous gradients on the switchin g boundaries, the fol-
lowing equality constraints for syn thesizing (A
i
, b
i
),
i ∈ {1, . . . , n
P
} are proposed:
A
i,[q]
−A
i+1,[q]
=α
i,[q]
C
i
, b
i,[q]
−b
i+1,[q]
=α
i,[q]
d
i
(8)
for α
i,[q]
∈ R and q ∈ {1, . . . , n
x
}, where A
i,[q]
repre-
sents the q-th r ow of A
i
.
The condition for the existence of a common Lya-
punov function represents a nonlinear matrix in e qual-
ity involving the matrices A
1
, . . . , A
n
P
and Q. If these
constraints are satisfied, th e system (2) is ensured to
have a globally stable limit cycle as in Def. s 1 and
2 with a period of T (provided that the signal u(t)
is also periodic with the same length, see Lemma 1).
The task is thus to adapt ( 2) in order to a chieve that
the limit cycle approximates the sample points in F
with respect to position and time.
3.3 Tracking the Sample Points in F
For tracking the sample points in a set F
i
, consider the
set F
1
explicitly – the following procedure can then be
transferred to the other sets F
i
, i ∈ {2, . . . , n
P
} equiva-
lently. For F
1
= { ˆx
1
, ˜x
2
, . . . , ˜x
n
1
} with n
1
denoting the
number of points in F
1
and ˆx
1
= ˜x
1
, the following cost
functional is defined:
J
1
:=
n
1
∑
j=2
||e
A
1
( j−1)∆t
ˆx
1
+ . . .
Z
( j−1)∆t
0
e
A
1
(( j−1)∆t−τ)
(b
1
+ Bu(τ)) dτ − ˜x
j
||
2
2
. (9)
It records the difference betwe en the rea c hable points
of ˙x(t) = A
1
x(t) + b
1
+ Bu(t) (starting from ˆx
1
) and
the sampled points in F
1
at each sampling time
2
.
By synthesizing A
1
, b
1
and B for a given signal
u(t), the first challenge in minimizing J
1
is the nonlin-
earity caused by the matrix exponential function e
A
1
t
.
2
For sampled states in F with non-uniform but known
sampling times, only the corresponding times in (9) need to
be adjusted.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
512

Based on the Taylor series:
e
A
1
t
=I
n
x
+A
1
t+
1
2!
A
2
1
t
2
+. . .≈I
n
x
+
n
d
∑
j=1
1
j!
A
j
1
t
j
(10)
the value of e
A
1
t
can be approximated by the right-
hand side of (10) with sufficiently high order n
d
. If
the state dimension n
x
is large, a high order n
d
would
increase the complexity of the optimization signifi-
cantly (due to a higher-order non linearity), whereas
a smaller order (such as n
d
≤ 3) would lead to a non-
negligible approximation error. To this end, two pos-
sible countermeasures are introduced:
• For a fixed matrix A
1
, the approximation error in
(9) is small for small times t. Especially for t < 1
the series t
j
, j ∈ {n
d
, n
d
+ 1 , . . .} in th e neglected
terms is converging to zero, and thus neglecting
these terms does only lead to small contributions
to the approximation error.
• For any fixed time t and if the spectru m of A
1
is contained in the unit cycle, the matrices A
j
1
,
j ∈ {n
d
, n
d
+ 1, . . .} in the neglected terms also
conve rge to zero, thus leading to small errors.
The first countermeasure is included into the parti-
tioning procedure in Section 3.1 Remark 2 by se-
lecting sam ple points on the boundar ie s such that
j · ∆t < 1 holds for all j ∈ {1, . . . , n
1
} in (9). The sec-
ond countermea sure is established by e nsuring that
the largest sing ular value of A
1
is smaller than one ,
what can be guaranteed by ob serving the nonlinear
matrix inequality:
A
T
1
A
1
≺ I
n
x
. (11)
Note that larger numbers n
p
of regions of the parti-
tion, in general, reduce the tr a nsition time from one
boundary to the next, and thus lead to smaller ap-
proxim ation errors in the Taylor series expan sion fo r
a given order n
d
(at the price of having to synthesize
more p a irs (A
i
, b
i
)). The condition (11) forces the
eigenvalues of A
1
to be contained in the interior of the
left half of the unit circle (since the contraction co n-
dition requires the real-part o f the eige nvalues of A
1
to be negative in add ition). Consequently, the conver-
gence rate of (2) in the region P
1
is also bounded by 1,
which can be cou nterproductive if the samp le points
to be tracked in F
1
encode that the state of the sampled
limit cycle changes very differently in a certain region
of th e state space. As a re sult, the inclusion of (11 )
should be seen as an o ptional me a sure, or be replaced
by a less conservative condition, such as A
T
1
A
1
≺ βI
n
x
for some β > 1. The described countermeasures only
affect the approximation quality withou t compr omis-
ing th e contraction property ensured by Lemma 1. A
detailed a nalysis of the upper bound of the approxi-
mation error can be found in (Higham, 2009; Kenney
and Laub, 1998).
The periodic signal u(t) can e.g. be chosen piece-
wise constant for k ∈ {0, 1, 2, . . .}:
u(t) =
(
−1, t < [kT, (k +
1
2
)T )
1, t < [(k +
1
2
)T,(k + 1)T ).
(12)
The integral part of (9) then le a ds to an analytic ex-
pression:
Z
t
0
e
A
1
(t−τ)
(b
1
+ Bu(τ)) dτ =
(e
A
1
t
− I
n
x
)A
−1
1
(b
1
− B) for 0 ≤ t <
1
2
T
(e
A
1
T
2
−I
n
x
)A
−1
1
(b
1
−B)+(e
A
1
(t−
1
2
T )
−I
n
x
)A
−1
1
(b
1
+B)
for
1
2
T ≤ t < T,
what is particularly beneficial for applying the pre-
viously discussed countermeasures in synthesis, see
Section 3.4. Note that the matrix A
1
is always in-
vertible, as the contractivity condition implies that A
1
must be Hurwitz.
3.4 Overall Optimization Problem
Given a partitioned state space according to Sec. 3.1
and a periodic signal u(t) of type (12), the optimiza-
tion problem to synthesize the switching affine system
(2) is defined as:
min
A
i
,b
i
,α
i
,i∈{1,...,n
p
},B,Q
n
P
∑
i=1
J
i
(13)
s.t. for all i ∈ {1, . . . , n
p
} :
constraints (8) ∀q ∈ {1, . . . , n
x
}, (14)
A
T
i
Q + QA
i
≺ 0, Q ≻ 0, B 6= 0, (15)
A
T
i
A
i
≺ I
n
x
(option al constraint), (16)
e
A
i
n
i
∆t
ˆx
i
+
Z
n
i
∆t
0
e
A
i
(n
i
∆t−τ)
(b
i
+Bu(τ))dτ= ˆx
i+1
. (17 )
In h ere, J
i
is defined fo r each region in a sim ilar way
as J
1
in (9). This is a nonlinear optimization problem
with in total (n
P
+ 1 )n
2
x
+ (2n
P
+ 1 )n
x
variables. The
cost func tional minimized in (13) r ecords the distance
between each sample point in F and the point on the
limit cycle of (2) at the same time. The c onstraints
(14) and (15) guarantee that the resulting sy stem (2)
is contrac tive, while the optio nal constraint (16) aims
at achieving a satisfying approximation by using the
Taylor expansion f or the matrix exponential function
in (13) and (17). The last constraint aims at ensur-
ing that the set of sam ple points ˆx
i
, i ∈ {1, . . . , n
P
}
on the boundaries are reached by the limit cycle of
(2). Otherwise, the minimization of (13) may only
On the Synthesis of Stable Switching Dynamics to Approximate Limit Cycles of Nonlinear Oscillators
513
force a transient trajectory of (2) to track the sample
points in F, instead of the limit cycle of (2 ) (due to
the appro ximation error of e
A
i
t
). In general, the op-
timization problem is not guaranteed to be feasib le ,
but increasing the number n
p
or choosing a d ifferent
partition contributes to finding a feasible solution.
As an extensio n to account for transient behavior
from arbitrary initial states to the limit cycle, an ad-
ditional term can be included in (13) to minimize the
deviation of the model dynamics from the sampled
transient trajectories. Finally, it is worth mentioning
that measurem e nt noise ( typically affecting the sam-
ples in F) is eliminated by the solution of (13) to (17)
and assigning the model (2) to any of the regions P
i
.
4 NUMERIC EXAMPLES
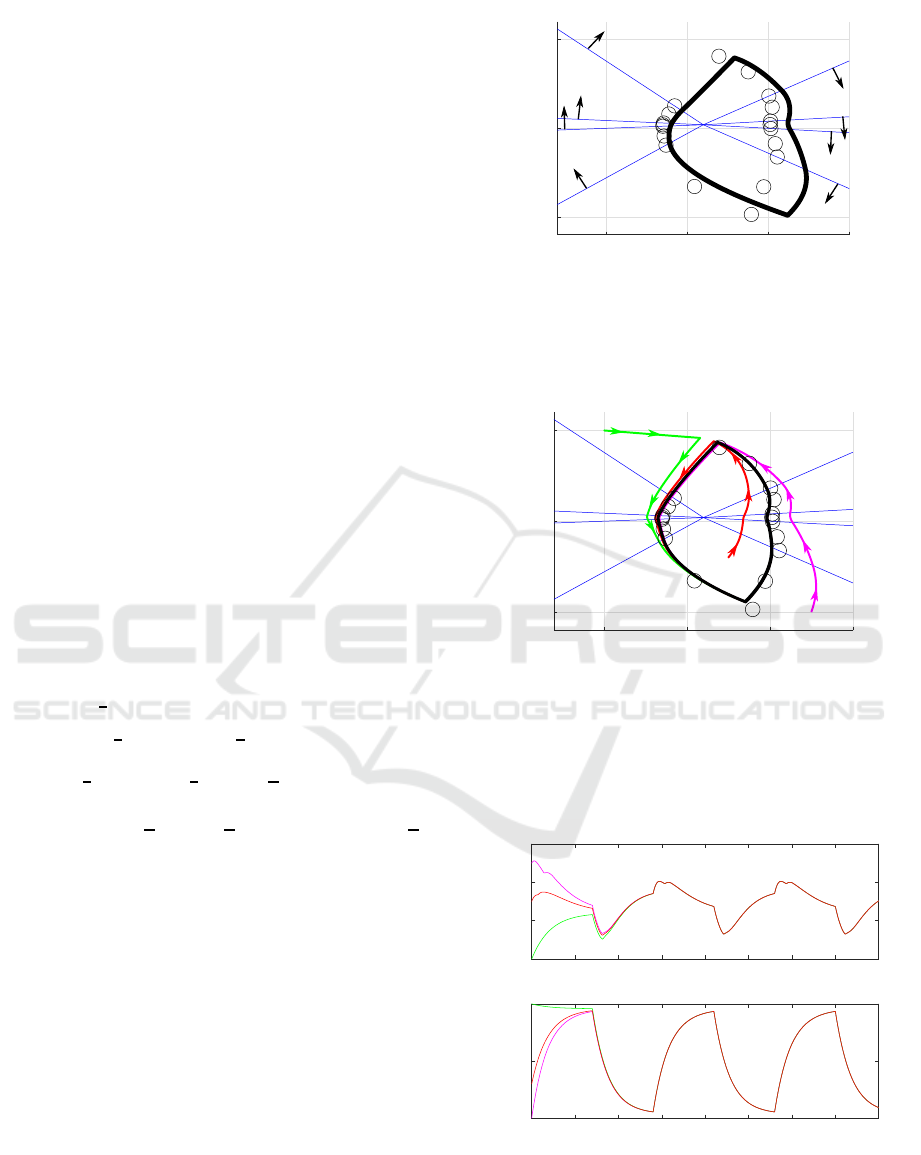
4.1 Illustrating Example in the Plane
To evaluate the performance of the proposed synthe-
sis method, first an example of a set F of nineteen
points in the plane is c onsidered, as shown in Fig. 4
and Fig. 5 (marked by the solid black circles). The
obtained period based on the sample set is T = 1.4,
which is also used f or the periodic signal (12). In a
first instance, the state space is partitioned by eight
rays (solid blue lines) according to the rules provided
in Section 3 with:
C
1
=
1 −
1
4
, C
2
=
1 −2
, C
3
=
−1 −2
,
C
4
=
−1 −
1
4
, C
5
=
−1
1
5
, C
6
=
−1 3
,
C
7
=
1
5
2
, C
8
=
1
1
6
, d
1
=
1
2
, d
2
= −3,
d
3
=−5, d
4
=−
3
2
, d
5
=−
3
5
, d
6
=5, d
7
=6, d
8
=
4
3
using the center point x
s
= [1, 2]
T
. The limit cycle of
(2) obtained from solving the proble m (13) with an
order of n
d
= 4 for the ma trix exponential function is
shown in Fig. 4. The shape of the limit cycle makes
apparent that a small order n
d
leads to considerable
approximation errors. As a countermeasure, the order
is increased to n
d
= 9, for which the pairs (A
i
, b
i
),
i ∈ {1, . . . , 8} are obtained from solving the problem
(13) (again with T = 1.4 in (12)). The resulting limit
cycle is marked in black in Fig. 5.
The distance to the sampled points is much
smaller, and trajectories from different initial p oints
(in- and outside of the limit cycle) are simulated to
demonstra te the stability and uniqueness of the limit
cycle, see Fig. 5 and Fig. 6 (so lid mage nta, red and
green). Note that the optional condition (1 6) was not
used within this optimization, since the accuracy of
the matrix exponential with n
d
= 9 was acceptable.
x
1
x
2
50
−50
0
0
5
−5
10
C
8
C
7
C
6
C
5
C
4
C
3
C
2
C
1
Figure 4: Sample points (black circles), switching bound-
aries in solid blue, and the limit cycle of the switching sys-
tem with n
d
= 4 in solid black.
x
1
x
2
50
−50
0
0
5
−5
10
A
8
, b
8
A
7
, b
7
A
6
, b
6
A
5
, b
5
A
4
, b
4
A
3
, b
3
A
2
, b
2
A
1
, b
1
Figure 5: Sampled points (black circles) and switching
boundaries in blue. The limit cycle is shown in black as well
as trajectories from different initial points x(0)=
2.5 −20
T
red, x(0)=
−5 50
T
green, and x(0)=
7.5 −50
T
magenta.
0 0.5 1 1.5 2 2.5 3 3.5 4
-5
0
5
10
1
(t)
0 0.5 1 1.5 2 2.5 3 3.5 4
-50
0
50
2
(t)
x
x
t
Figure 6: Convergence of x
1
(t) and x
2
(t) for different initial
points x(0)=
2.5 −20
T
red, x(0)=
−5 50
T
green, and
x(0)=
7.5 −50
T
magenta.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
514
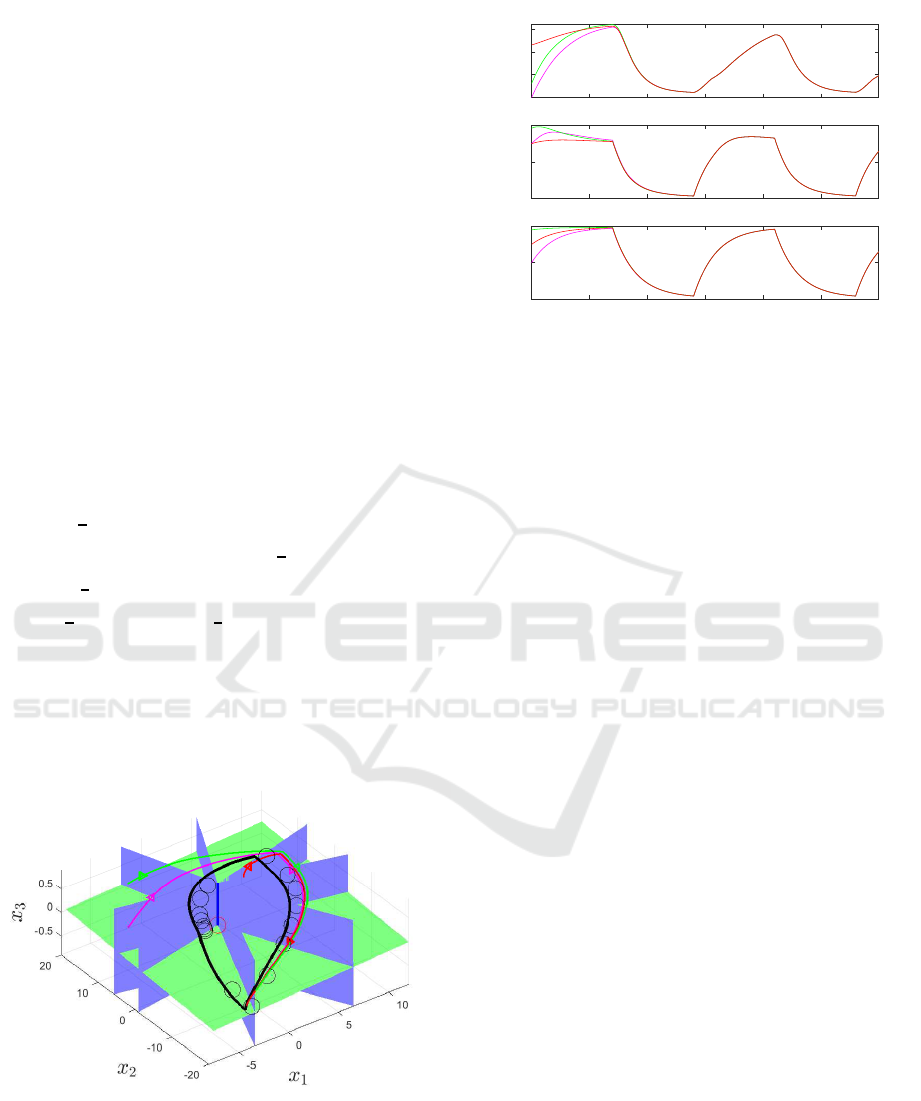
4.2 Example i n a 3D-Space
For an add itional example w ithin a 3-dimensiona l
state space, consider the set of sample points illus-
trated in Fig. 7 (denoted by blac k circles). By apply-
ing the method described in Section 3.1 ( case n
x
= 3),
and adhering to the requirement of the first counter-
measure (transition times between sam ple points on
adjacent boundaries are less than 1 ) leads to n
p
= 8
subsets F
i
to minimize the transition time between
each pair of ˆx
i
. Solving the optimization pro blem (4)
and using the provided sample points as well as the
center point x
s
= [1, 2, 0]
T
provides the following re-
sult:
Ω
∗
=
−0.0115 −0.0066 0.9999
, ε
∗
= −0.0247,
which is shown as green plane in Fig. 7. The required
line of intersectio n is give n by Γ := {x ∈ R
3
| x =
x
s
+ ηΩ
∗
, η ∈ R}, as marked by the solid blue line
in Fig. 7. Since no point in F is contained in Γ, a
unique plane containing both ( Γ and ˆx
i
) is determined
for each sample point ˆx
i
to:
C
1
=
1 −
1
4
0.0099
, C
2
=
1 −2 −0.0017
,
C
3
=
−1 −2 −0.0247
,C
4
=
−1 −
1
4
−0.0132
,
C
5
=
−1
1
5
−0.0102
, C
6
=
−1 3 0 .0083
,
C
7
=
1
5
2
0.0280
, C
8
=
1
1
6
0.0126
, d
1
=0.5, d
2
=−3
d
3
=−5, d
4
=−1.5, d
5
=−0.6, d
6
=5, d
7
=6, d
8
=1.33,
see the solid blue planes in Fig. 7. The resulting limit
cycle o btained from solving the optimization problem
in Sectio n 3.4 is marked in black in Fig. 7. The dis-
tance to the sampling points is onc e again acceptable,
Figure 7: Sampled points (black circles), green plane with
minimum distance to the sampled points i ncluding x
s
(red
circle), the line of intersection Γ as solid blue line and
boundaries shown as planes in blue, while the limit cycle
is marked in black and the trajectories from different initial
points x(0)=
6.5 10 0.1
T
red, x(0)=
−1.9 18.5 0.18
T
green, and x(0)=
−5 10 0
T
magenta.
0 0.5 1 1.5 2 2.5 3
-5
0
5
10
1
(t)
0 0.5 1 1.5 2 2.5 3
-20
0
20
2
(t)
0 0.5 1 1.5 2 2.5 3
-0.2
0
0.2
3
(t)
x
x
x
t
Figure 8: Convergence of x
1
(t), x
2
(t), x
3
(t) for dif-
ferent initial points x(0) =
6.5 10 0.1
T
red, x(0) =
−1.9 18.5 0.18
T
green, and x(0)=
−5 10 0
T
magenta.
even though a ll dimensions are on significantly dif-
ferent scales, which underscores the approximation
quality of the approach. Trajectories from different
initial points again demonstrate the convergence to
the unique limit cycle, see Fig. 7 an d Fig. 8 with tra-
jectories in magenta, red, and green.
5 CONCLUSIONS
This work has introduced a method for approximat-
ing periodic behavior of non linear dynamic systems
not restricted to the planar case. Based on suitable
sampling of the limit cycle of th e nonlinear dynam-
ics, switched affine systems with exogenous inputs
are used for app roximation, wh ile the approach pre-
serves essential limit cycle properties including stabil-
ity and u niqueness. Unlike previously available meth-
ods, the work here provides constructive rules to par-
tition the state space and synthesize the dynam ic s by
optimization, such that the limit cycle of the switching
affine system matches the sample points of the non-
linear data generator in an optimized sense. By using
the notion of contractivity, the constructed limit cycle
is ensured to be globally stable. Although the intro-
duced conditions generate a non-convex and nonlin-
ear optimization problem, they simultaneously ensure
a smooth limit cycle, a behavior freq uently observed
in real-world systems. While solvability of the opti-
mization pr oblem cannot be guaranteed, any solution
found under these conditions will be convergent.
It should be noted that the use of a center point in
which all boundaries intersect is p articularly suitable
if the sample points have a relatively even distribution
around an interior region in R
n
x
.
On the Synthesis of Stable Switching Dynamics to Approximate Limit Cycles of Nonlinear Oscillators
515

Future work aims at investigating schemes of par-
titioning without a common center point, and the cou-
pling of severa l oscillators of the proposed type.
ACKNOWLEDGEMENTS
Partial financial support by the G e rman Research
Foundation (DFG) through the Research Training
Group Biological Clocks on Multiple Time Scales
(GRK 2749/1) is gratefully acknowledged.
REFERENCES
Atherton, D. and Dorrah, H. (1980). A survey on non-
linear oscillations. International Journal of Control,
31(6):1041–1105.
Bernardo, M., Budd, C., Champneys, A. R., and Kowal-
czyk, P. (2008). Piecewise-smooth dynamical sys-
tems: theory and applications, volume 163. Springer
Science & Business Media.
Coll, B., Gasull, A., and Prohens, R. (2001). Degener-
ate hopf bifurcations in discontinuous planar systems.
Journal of mathematical analysis and applications,
253(2):671–690.
Demidovich, B. P. (1967). Lectures on stability theory.
D¨orfler, F. and Bullo, F. (2014). Synchronization in com-
plex networks of phase oscillators: A survey. Auto-
matica, pages 1539–1564.
Freire, E., Ponce, E., Rodrigo, F., and Torres, F. (1998). Bi-
furcation sets of continuous piecewi se linear systems
with two zones. International Journal of Bifurcation
and Chaos, 8(11):2073–2097.
Gaiko, V. A . (2011). Multiple limit cycle bifurcations of the
fitzhugh–nagumo neuronal model. Nonlinear Analy-
sis: Theory, Methods & Applications, 74(18):7532–
7542.
Gonze, D. and Ruoff, P. (2021). The goodwin oscillator and
its legacy. Acta Biotheoretica, 69(4):857–874.
Hanke, N., Liu, Z., and Stursberg, O. (2024). Approxima-
tion of limit cycles by using planar switching affine
systems with guarantees for uniqueness and stability.
In European Control Conference, pages 1460–1465.
Hanke, N., Liu, Z., and Stursberg, O. (2025). Approxima-
tion of planar periodic behavior from data with sta-
bility guarantees using switching affine systems. In
American Control Conference, pages 1944–1949.
Hanke, N. and Stursberg, O. (2023). On the design of limit
cycles of planar switching affine systems. In European
Control Conference, pages 2251–2256.
Higham, N. J. (2009). The scaling and squaring method
for the matrix exponential revisited. SIAM review,
51(4):747–764.
Joshi, S. K., Sen, S., and Kar, I. N . (2016). Synchronization
of coupled oscillator dynamics. I FAC-PapersOnLine,
49(1):320–325.
Kai, T. and Masuda, R. (2012). Limit cycle synthesis of
multi-modal and 2-dimensional piecewise affine sys-
tems. Mathematical and Computer Modelling, 55(3-
4):505–516.
Kenney, C. S. and Laub, A. J. (1998). A schur–fr´echet al-
gorithm for computing the logarithm and exponential
of a matrix. SIAM journal on matrix analysis and ap-
plications, 19(3):640–663.
Kudryashov, N. A. (2021). The generalized duffing oscil-
lator. Communications in Nonlinear Science and Nu-
merical Simulation, 93:105526.
Kuramoto, Y. (2005). Self-entrainment of a population
of coupled non-linear oscillators. In International
symposium on mathematical problems in theoreti-
cal physics. Kyoto University, Japan, pages 420–422.
Springer.
Lauer, F., Bloch, G., and Vidal, R. (2011). A continuous op-
timization framework for hybrid system identification.
Automatica, 47(3):608–613.
Llibre, J., Ponce, E., and Torres, F. (2008). On the exis-
tence and uniqueness of limit cycles in li´enard differ-
ential equations allowing discontinuities. Nonlinear-
ity, 21(9):2121.
Lum, R. and Chua, L. O. (1991). Global properties of con-
tinuous piecewise linear vector fields. part i: Simplest
case in R
2
. International journal of circuit theory and
applications, 19(3):251–307.
Mirollo, R. E. and Strogatz, S. H. (1990). Synchronization
of pulse-coupled biological oscillators. SIAM Journal
on Applied Mathematics, 50(6):1645–1662.
Paoletti, S., Juloski, A. L., Ferrari-Trecate, G., and Vidal,
R. (2007). Identification of hybrid systems a tutorial.
European journal of control, 13(2-3):242–260.
Pavlov, A., Pogromsky, A., Van De Wouw, N., and Nijmei-
jer, H. (2007). On convergence properties of piece-
wise affine systems. International Journal of Control,
80(8):1233–1247.
Peterchev, A. V. and Sanders, S. R. (2003). Quantiza-
tion resolution and limit cycling in digitally controlled
pwm converters. IEEE Transactions on Power Elec-
tronics, 18(1):301–308.
Teplinsky, A. and Feely, O. (2008). Limi t cycles in a mems
oscillator. IEEE Transactions on Circuits and Systems
II: Express Briefs, 55(9):882–886.
Werckenthin, A., Huber, J., Arnold, T., Koziarek, S., Plath,
M. J., Plath, J. A., Stursberg, O., Herzel, H., and
Stengl, M. (2020). Neither per, nor tim1, nor cry2
alone are essential components of the molecular circa-
dian clockwork in the madeira cockroach. PLoS One,
15(8):e0235930.
Xu, Y. and Luo, A. C. (2019). Fr equency-amplitude char-
acteristics of periodic motions in a periodically forced
van der pol oscillator. The European Physical Journal
Special Topics, 228(9):1839–1854.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
516
