
Leveraging ROS to Support LLM-Based Human-Robot Interaction
Walleed Khan
1 a
, Deeksha Chandola
1 b
, Enas AlTarawenah
1 c
,
Baran Parsai
1 d
, Ishan Mangrota
2 e
and Michael Jenkin
1 f
1
Electrical Engineering and Computer Science, Lassonde School of Engineering, York University, Toronto, Canada
2
Information Technology, Netaji Subhas University of Technology, New Delhi, India
Keywords:
Robot Control, Avatar-Based Interface.
Abstract:
Large Language Model (LLM)-based systems have found wide application in providing an interface between
complex systems and human users. It is thus not surprising to see interfaces between autonomous robots also
adopting this strategy. Many modern robot systems utilize ROS as a middleware between hardware devices,
standard software tools, and the higher level system requirements. Here we describe efforts to leverage LLM
and ROS to provide not only this traditional middleware infrastructure but also to provide the audio- and text-
based interface that users are beginning to expect from intelligent systems. A proof of concept implementation
is described as well as an available set of tools to support the deployment of LLM-based interfaces to ROS-
enabled robots and stationary interactive systems.
1 INTRODUCTION
As robots move out of the lab and into the world
there is an increasing need to focus on developing
robots that humans are willing to engage and inter-
act with. Supporting this interaction may involve de-
veloping robots that provide a face, either realistic or
cartoonish, to provide a focus for interaction. Adding
a face to a robot can be beneficial (Altarawneh et al.,
2020) but incorporating a visual display such as that
shown on the robot in Figure 1 requires providing a
software infrastructure that supports the integration
of the visual appearance (an avatar) with the robot.
Adding such a display also introduces the need to an-
imate the avatar and provide mechanisms to drive the
avatar with realistic speech. Early efforts, such as the
one shown in Figure 1 relied on pattern-based chat-
bot technology to provide responses to queries of the
robot. The development of Large Language models
(LLMs) provides a more effective mechanism to drive
the interaction.
There have been a number of efforts to leverage
the capabilities of Large Language and Foundational
a
https://orcid.org/0000-0002-8945-4329
b
https://orcid.org/0000-0003-3654-0351
c
https://orcid.org/0009-0004-8744-1139
d
https://orcid.org/0009-0004-1329-7429
e
https://orcid.org/0009-0008-0766-8966
f
https://orcid.org/0000-0002-2969-0012
Figure 1: Interacting with a robot equipped with a visual
avatar. Developing a system that provides such interaction
mechanisms requires a software infrastructure to support
generation and interaction with the embedded visual dis-
play.
Models to support the process of developing useful
and user friendly software for robot control. For ex-
ample, the ROScribe package (Technologies, 2005)
can be used to assist in the development of novel ROS
packages while Mower et al. (2024) describes a sys-
tem in which an LLM constructs plans from a set of
atomic actions and standard mechanisms to assem-
ble them. But LLMs also find application in terms
of transforming standard user interaction mechanisms
402
Khan, W., Chandola, D., AlTarawenah, E., Parsai, B., Mangrota, I. and Jenkin, M.
Leveraging ROS to Support LLM-Based Human-Robot Interaction.
DOI: 10.5220/0013831200003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 402-409
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

Figure 2: LLM-based interaction technology can be used to
support a stationary user interface display as shown here.
The software shown here supports multiple visual avatars.
User input is via visual and audio channels and the user can
choose between different animated avatars.
into specific robot actions. For example, Wang et al.
(2024) describes a system that monitors the user and
then uses an LLM to transduce multi-modal commu-
nication into commands to the robot. Here we are
interested in leveraging an LLM to provide a more
natural interface to a user interacting with a mobile
robot or with a stationary avatar-based system such as
the one shown in Figure 2.
Merging LLM-based systems with robot control
software involves integrating two very different mid-
dleware software architectures. A common strat-
egy in LLM-based systems is the use of a retrieval
augmented generation (RAG) approach (Gao et al.,
2024). In contrast, many modern robot systems uti-
lize ROS (Macenski et al., 2022) as a middleware to
structure the software infrastructure. ROS (the cur-
rent common version is ROS 2), is a message passing
paradigm in which messages are strongly typed and
individual nodes operate in parallel. Integrating these
two architectures can be challenging. ROS involves
a parallel message passing architecture while RAG-
informed LLM systems can be modelled as a query-
response architecture. Here we explore the integra-
tion of these two architectures to develop a system
that enables a robot or an avatar system using ROS to
leverage advances in LLM-based interaction.
The remainder of this paper is organized as fol-
lows. Section 2 describes previous efforts that inte-
grate LLMs in robot systems, with particular empha-
sis on leveraging LLMs to support human-robot inter-
action (HRI). Section 3 describes how ROS and RAG-
LLM systems can be integrated together. Section 4
provides a simple example of how this combined ar-
chitecture supports personalized HRI while retaining
a standard ROS environment for robot control. Fi-
nally, Section 5 summarizes the work and describes
ongoing work on RAG-LLM-ROS integration. The
Avatar2 software package described here is available
on GitHub at https://github.com/YorkCFR/Avatar2.
2 PREVIOUS WORK
There have been a number of efforts to leverage LLMs
to support robot-related tasks from path-planning to
learning from demonstration. See Wang et al. (2025)
and Jeong et al. (2024) for recent reviews. Here we
concentrate on the use of LLMs to support human-
machine interaction and human-robot interaction in
particular.
Perhaps the most commonly encountered use of
LLMs for human-machine interaction is via a chat-
bot, a program designed to simulate conversation with
a human. Very early chatbots (e.g., Eliza – Weizen-
baum 1966) were based on simple pattern matching.
However, since the introduction of LLMs, LLMs have
found wide application in the development of chat-
bots (see Dam et al., 2024 for a review). Fundamen-
tally, LLMs are trained on an extremely large cor-
pus of textual data and develop a model that given
a portion of a text stream can predict the next tex-
tual token that should appear. Starting with an ini-
tial text prompt, this process can be applied recur-
sively to generate a response to a given prompt. In-
ternally, LLMs utilize a transformer architecture and
an attention mechanism. The resulting trained archi-
tecture has typically been trained on a large and gen-
eral corpus of data. This results in an effective text-
based chatbot that can be used to generate a realistic
response in a conversation or provide an answer to a
given question. It is critical to recognize the limita-
tions of the approach, however. An LLM trained on
a general corpus of data, e.g., by scraping the inter-
net, will not necessarily contain only truths, and the
process of generalizing a response to a given token
sequence can result in hallucination in the response.
Detecting and dealing with hallucinations can be a
challenging task. See Luo et al. (2024) for details.
Given their ability to engage in conversations,
Leveraging ROS to Support LLM-Based Human-Robot Interaction
403
Embedding
Generation
Query LLM Response
Information
Vector
Database
Prompt+Relevant
embeddings
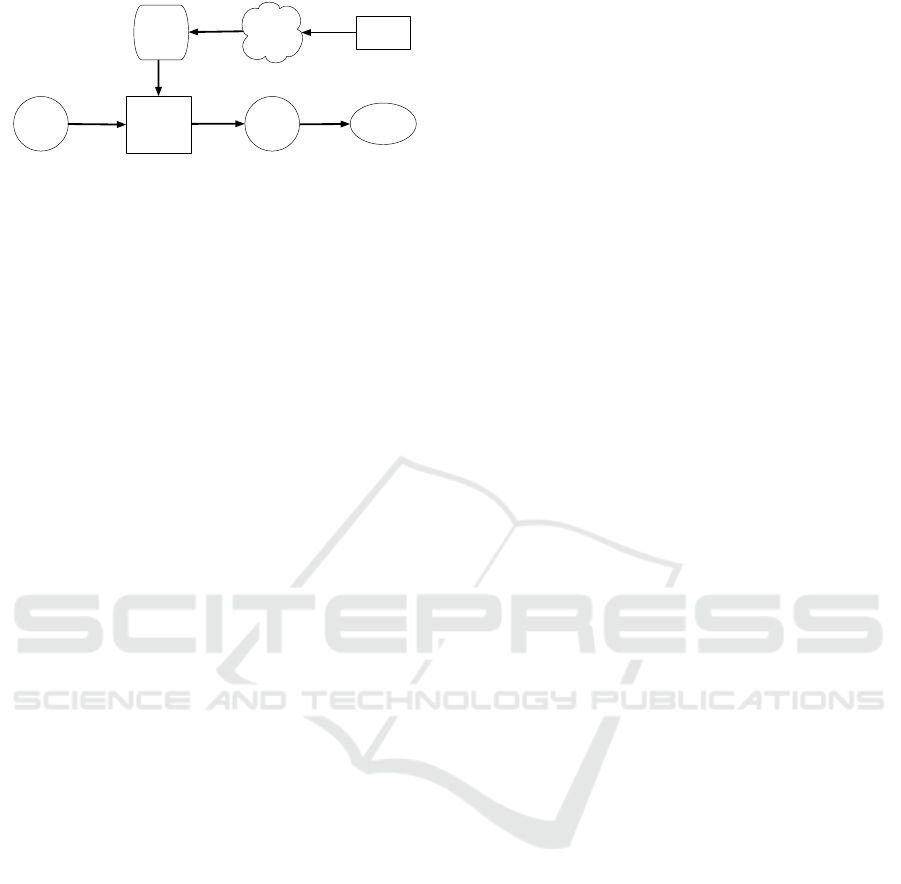
Figure 3: RAG-based interaction.
LLM-based systems have found application in sys-
tems that wish to engage the user in conversation. For
example, Shoa and Friedman (2025) leverages LLM
to deploy virtual humans in XR environments. In
terms of robots, Kim et al. (2024) explores the im-
pact of LLM-powered robots to engage in conversa-
tion with users, and reports that LLM-powered sys-
tems can enhance the user expectations in terms of
robot communication strategies. While Ghamati et
al. (2025) explore the use of personalized LLM-based
communication with robots using EEG data.
2.1 Retrieval-Augmented Generation
(RAG)
Tuning an LLM to a specific task can be accom-
plished in a number of different ways. Fine tuning
the network on data specific to a given domain is
a popular approach, however it can be difficult and
computationally very expensive to perform this fine
tuning. Another, less computationally expensive ap-
proach, is to provide within the prompt given to the
LLM specific textual information that is relevant to
the query. The basic concept is sketched in Figure 3.
Prior to interaction with the chatbot local informa-
tion is embedded in some representation and stored
in a vector database. This process typically requires
the local documentation to be chunked into manage-
able pieces related to the chatbot’s expected response
length. When a query is received by the chatbot,
the vector database is searched and relevant chunks
are retried from the database and integrated into the
LLM query. This focuses the LLM’s response on the
chunks recovered from the database. A number of dif-
ferent software libraries, including LangChain, have
been developed to support this process and provide
tools to encode and recover data chunks from the vec-
tor database.
3 INTEGRATING LLMS WITHIN
THE ROS ECOSYSTEM
A key difference between the RAG-LLM and ROS ar-
chitectures is the asynchronous message-passing ap-
proach of ROS and the synchronous query-response
nature of RAG-LLMs. Furthermore, LLMs are
known for their latency in generating a response.
Most commercial remote (cloud-based) LLMs must
deal with communication latency and potential com-
putational delays. Locally hosted LLMs avoid this
communication latency but must deal with more se-
vere local computational issues. In either case, deal-
ing with this latency involves structuring LLM query
responses within the ROS framework to retain liveli-
ness in the ROS environment.
The basic structure of the approach is shown in
the ROS computation graph in Figure 4. This graph
shows only those nodes and messages related to HRI.
The core process takes input from the user, includ-
ing audio and visual information. This information
is processed asynchronously to monitor the user’s in-
teraction with the system. (Here we assume only a
single user communicates with the robot at a time.)
This information is then processed by a RAG-LLM
implemented in LangChain. Output from the RAG-
LLM’s is then used to provide textual output which is
converted to an audio signal which is rendered to the
user. While this rendering is taking place, the audio
input process is suppressed so that the robot does not
respond to its own utterances.
The prompt for the LLM is informed by a RAG
system that is tuned by the user to whom the system
is communicating as well as being informed by the
information contained within the ROS messaging sys-
tem.
3.1 Tailoring the Response to the
Individual
The system employs facial recognition capabilities to
identify known individuals and personalize interac-
tions based on their profiles. See Figure 5. This pro-
cess also provides information about the user interact-
ing with the robot that can be used to enhance the in-
teraction process, and even to assist in ignoring users
who are at some distance from the robot or avatar.
A standard face recognition system (dlib) based
on HOG and SVM is used to recognize faces. This
approach, introduced in Dalal and Triggs (2005) for
body detection has been successfully adapted to face
detection. (See Singh et al. 2020 for a review.) The
largest identified face is then compared against previ-
ously captured snapshots of participant faces associ-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
404

/avatar2/rosbridge_websocket/avatar2/sound_capture
/avatar2/avatar_camera
/avatar2/in_raw_audio
/avatar2/avatar_camera/image_raw
/avatar2/analysis
/avatar2/sound_to_text
/avatar2/head_detect
/avatar2/sentiment_analysis
/avatar2/in_message
/avatar2/speaker_info
/avatar2/llm_engine
/avatar2/user_tracker
/avatar2/out_message
/avatar2/text_to_sound
/avatar2/out_raw_audio /ros_avatar
Figure 4: Basic structure of the approach. Standard ROS nodes are used to capture audio and visual interactions with the
robot and either a 3d avatar (as shown in Figure 6) or 2d animation (as shown in Figure 7) is used to present audio responses
and visual cues to the user. Shown here is a simple version of the approach using a 2D animation for presentation. The 3d
version uses rosbridge to connect to the Unity-based avatar which also has access to the output of the user tracker node which
provides information to the animation system so that the avatar can focus on the individual who is interacting with the robot.
ated with this task to enable the identification of the
individual who is communicating with the robot or
avatar. Identified faces which are not identified as be-
ing members of this set of faces are labelled as ‘un-
known’.
As the bounding box of the face is known, it is
possible to estimate a number of properties related
to the user’s visual interaction with the robot, includ-
ing an estimate of the distance from the robot to the
user. Based on the estimated distance, the nature of
the interaction is defined in terms of proxemics (Hall,
1966). Specifically, the distance to the user is char-
acterized as one of intimate, personal, social or pub-
lic. Face tracking data is aggregated across time to
characterize the current visual interaction between the
robot/avatar and the user as being one of starting,
continuing, or terminated. Conversations can be dis-
rupted (another individual has been identified as the
current speaker), idle (there is no one in the field of
view of the camera), or looking (the robot was com-
municating with an individual who has not been de-
tected for a short period of time). This information
enables the LLM to incorporate information about the
speaker (is this an ongoing conversation, for example)
when formatting the LLM prompt.
3.2 Dealing with User Sentiment
A wide range of methods exist for identifying a
speaker’s emotional state, including those based on
visual cues, textual analysis, and audio signals, as
well as more recent approaches that combine multi-
ple data types. Prior studies, such as Soleymani et
al. (2017) and Tripathi et al. (2019), provide exten-
sive reviews of these techniques. The basic approach
here is to assign a one-hot encoded vector over a
set of emotion labels – (Sadness, Excitement, Anger,
Neutral, Happy, Fear, or Surprise) – to each user ut-
terance. Although it would be possible to integrate
multiple cues to the perceived emotional content of
an utterance, for example, to combine text-based and
audio-based emotion detection, here we concentrate
on an audio signal-only approach that is based on the
work of Tripathi et al. (2019). Audio signals are de-
composed into a collection of audio features includ-
ing Fourier frequencies and Med-frequency Cepstral
Coefficients. These features are used within a deep
neural network involving stacked LSTMs to map the
audio signal onto the one-hot vector described above.
The audio-only system in Tripathi et al. (2019) re-
lied on the IEMOCAP dataset (Busso et al., 2008) for
training and a smaller set of sentiment classes. For
the system used here, we expand the set of sentiment
classes to the seven provided above and used both the
IEMOCAP and MELD (Poria et al., 2018) datasets to
increase the size of the training dataset.
3.3 Monitoring the Robot System’s
State
Having the LLM monitor the robot system is straight-
forward as the RAG infrastructure has complete ac-
cess to the ROS ecosystem. To take but one simple
example, to expose the current pose of the robot to
the LLM it is straightforward to add a statement such
as
The robot is currently at location
x=3.0m and y=2.0m.
to the prompt. This can be done either automatically
or more efficiently to only include such information if
the user’s query appears to contain key words such as
‘location’ or sequences like ‘where are you’. As the
RAG process is also aware of the user with whom it
Leveraging ROS to Support LLM-Based Human-Robot Interaction
405

Figure 5: Facial recognition system recognizing the indi-
vidual interacting with the system. The system is able to
retrieve the user information and pass it on in the ROS net-
work with their id, name, and their role.
is conversing, the nature of the response can be tuned
so that a response that is appropriate for a system de-
veloper (such as based on the property above) can be
replaced with a property such as
The robot is currently near the
kitchen.
assuming that the location (3.0,2.0) in the global co-
ordinate frame is near the kitchen.
3.4 Giving a Face to the Interaction
The avatar architecture described here draws on the
Extensible Cloud-based Avatar framework described
in Altaraweneh et al. (2021). This system serves as
a puppetry toolkit compatible with the Robot Oper-
ating System (ROS). An overview of the avatar sys-
tem architecture is depicted in Figure 4. In response
to human interaction, the avatar system integrates the
generated response into the avatar display. The ren-
dering system, as described in Altarawneh and Jenkin
(2020), combines speech audio with synchronized
lip motion and expressive facial animations to pro-
duce coherent avatar responses, which are integrated
into the display using idle loop animations. Rather
than defaulting to a static avatar pose between re-
sponses, the system employs a dynamic idle anima-
tion to maintain an animated presence and to assist in
masking any latency associated with responding to a
user query.
Early implementations of this avatar rendering re-
quired an in-house computational and rendering clus-
ter composed of multicore CPU servers equipped with
GPUs and ample memory and storage, capable of sup-
porting intensive animation tasks. The current imple-
mentation leverages standard video game assets that
support non-player-characters (NPCs) and the Unity
Figure 6: Sample avatars. Constructing and rigging avatars
is simplified by the existence of a number of standard
toolsets that enable construction. These toolsets also sup-
port lip/mouth synchronization with audio utterances and
the introduction of animations that mimic human (and other
avatar) mannerisms to provide a feeling of naturalness to
the agent being simulated.
Game Engine to render the avatar. These libraries
also simplify the deployment of the delay loops de-
scribed in Altaraweneh et al. (2021). Communica-
tion between the ROS and Unity spaces is provided by
the UnityRos library described in Codd-Downey et al.
(2014). Individual animated avatars are built using the
Ready Player Me
1
toolkit, and idle animations are
generated using Mixamo
2
. A view of a sample avatars
created in this manner is given in Figure 6.
The rendering process has complete access to the
ROS environment, including sentiment and visual in-
formation captured of the user. This would enable, for
example, the avatar to direct its gaze at the user inter-
acting with the robot and its avatar. It is important
to observe that the display does not have to resem-
ble a human (or even biological) entity. Figure 7, for
example, shows a alternative ‘avatar’ that consists of
a simple animated textured sphere whose appearance
changes with the intensity of the audio signal being
uttered.
4 AN EXAMPLE INTERACTION
To demonstrate the integrated system’s capabilities
in a real-world deployment, we present an interac-
tion with an avatar assistant operating at the welcome
desk at the ACME Hearing Clinic. The system shown
here is operating using a Llama-3.1-8B model de-
ployed on a dedicated RTX 4090 GPU-powered sys-
tem. While this smaller model provides near real-time
1
See readyplayer.me
2
See mixamo.com.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
406
Figure 7: An alternative display ‘face’. Rather than utilizing
a 3d rendered avatar, other options are possible. Here an
animated sphere is used to focus the user’s attention. Four
frames of the animation are shown.
performance, larger language models introduce more
substantial delays in response generation, highlight-
ing the critical trade-off between model sophistication
and conversational responsiveness.
The system implements basic query caching dur-
ing ongoing interactions, storing queries until a pre-
defined cache size is full, to further reduce response
times for subsequent queries. Upon response gener-
ation, the LLM output is broadcast as a ROS topic
across the network infrastructure. The Unity-powered
avatar system, described in Section 3.4, subscribes to
these topic messages through the rosbridge websocket
connection.
When the Unity system receives an incoming
topic message containing the generated response, it
initiates synchronized lip movements and contextu-
ally appropriate gestures throughout the duration of
the utterance. These movements during speech repre-
sent a deliberate implementation of human conversa-
tional mannerisms, designed to enhance the perceived
authenticity of the interaction. Upon completion of
the spoken response, the avatar transitions to attentive
listening behaviors, including subtle head movements
mirroring the natural behavioral patterns observed in
human-to-human conversation.
The following transcript demonstrates these inte-
grated capabilities in action:
Mary (AI Assistant): Welcome to the
ACME Hearing Clinic! I’m Mary, one
of our friendly and knowledgeable staff
members. How can we help you today?
Do you have an appointment scheduled or
would you like to schedule one?
Walk-in Patient: “I don’t have an appointment
there, but I wanted to ask you about your clinic
hours and who will make it I might be able to see.”
Mary (AI Assistant): Hello! I’m
Mary, a helpful assistant at the
ACME Hearing Clinic. We’re open
from Monday to Friday at 9am till
5 pm. If you’d like to schedule an
appointment, please feel free to call
us at (555) 555-5555 or email us at
ACMEhearingclinic@nowhere.na. We’ll
be happy to accommodate your needs!
Please note that we may have limited
availability on evenings and weekends,
but we can try to work with you to find
a time that suits you best.
Walk-in Patient: “Can you tell me about who I
might be able to see?”
Mary (AI Assistant): Welcome to the
ACME Hearing Clinic! I’m Mary, and
I’ll be happy to help you. As for
who you might see here, we have a
team of experienced audiologists
and hearing specialists. They will
assess your hearing and provide
personalized recommendations for
treatment. You may also meet with our
speech-language pathologist (SLP) if
you’re experiencing difficulties with
communication or understanding speech
in noisy environments. We’ll do our
best to make sure you feel comfortable
and supported throughout the process.
Walk-in Patient: “Can you tell me about the resi-
dent doctor and the clinic?”
Mary (AI Assistant): I’m Mary, a helpful
assistant at the ACME Hearing Clinic.
I’d be happy to tell you about our
clinic and staff. Our clinic is
located on the main floor of Life
Labs at 99 Nowhere Road. We’re a
state-of-the-art facility with a team
of experienced audiologists and hearing
aid specialists. One of our resident
doctors, Dr. Patel, is an expert in
audiology and hearing health. She’s
been working with us for several years
and has helped countless patients
improve their hearing and quality of
life. We also have a team of friendly
and knowledgeable staff who are always
happy to help answer any questions
you may have about your hearing or our
services.
The system maintains consistent persona through-
out the exchange, with Mary appropriately greet-
ing the patient and maintaining a professional
yet welcoming tone. The RAG system retrieves
domain-specific information including precise oper-
ating hours, contact details, staff qualifications, and
facility location, demonstrating knowledge base inte-
gration. However, the conversation also reveals ar-
Leveraging ROS to Support LLM-Based Human-Robot Interaction
407

eas for improvement in discourse management. The
avatar exhibits redundant greeting behaviors, partic-
ularly noticeable in the second and third responses
where Mary re-introduces herself despite already hav-
ing established her identity. Currently, work is ad-
dressing this exact issue to reduce the redundant ex-
change and enhance the experience with a more so-
phisticated dialogue state tracking to maintain con-
versational coherence across multiple exchanges.
The response latency achieved through local GPU
processing enables natural conversational flow, while
the cached query system ensures that common in-
quiries about clinic hours and services are delivered
with minimal computational overhead. Throughout
each response, the Unity-powered avatar system syn-
chronizes speech with appropriate gestures and main-
tains attentive listening behaviors between utterances,
creating a compelling demonstration of naturalistic
human-robot interaction.
5 ONGOING WORK
The RAG-LLM-ROS system has been deployed for a
collection of different applications, including as mod-
elling a welcoming avatar for a medical clinic. The
use of ROS as a middleware enables the straightfor-
ward integration of visual and other sensor cues to
the chatbot, enabling a high level of personalization
without requiring a significant investment in software
to process sensor data.
Current development efforts are focused on lever-
aging the system’s facial recognition capabilities to
implement role-based access control and personal-
ized interaction management. Figure 5 showcases
the recognition capabilities of the system. The ex-
isting user identification system, which successfully
recognizes known individuals and characterizes inter-
action dynamics through proxemics analysis, is being
extended to support hierarchical user privileges and
administrative functions.
The system described here assumes that the
avatar/robot does not have to respond to commands
through executed actions. As a consequence the cur-
rent system assumes that the output of the LLM is a
text string that includes only the text to be presented
through the animated interface. Ongoing work is ex-
ploring including basic robot actions (e.g., move to a
given location) through the use of a structured LLM
response, e.g., by having the LLM respond using a
json structure that includes both motion commands as
well as text to respond with).
Using LLMs to power natural and responsive
Human-Robot Interaction (HRI) systems involves
managing the inherent latency of Large Language
Models (LLMs). The system described here utilizes
ROS to create a robust and asynchronous architec-
ture, yet delays arising from LLM processing, net-
work communication, or local computation remain in-
evitable. Such delays disrupt the flow of interaction
and negatively impact user experience as mentioned
in Schoenberg et al. (2014) and Zhang et al. (2024).
Current work on addressing this challenge seeks to
manage the user’s perception of latency by lever-
aging avatar behaviors that mimic human conversa-
tional cues during cognitive processing. Research has
demonstrated that conversational fillers and accompa-
nying gestures can significantly improve human-robot
interaction by making responses appear more natural
and reducing perceived delays (Wigdor et al., 2016).
Ongoing research is developing and validates tech-
niques that make unavoidable waiting periods feel
like a natural part of the interaction, thereby enhanc-
ing the avatar’s perceived responsiveness and natural-
ness.
ACKNOWLEDGEMENTS
The financial support the NSERC Canadian Robotic
Network, Mitacs Globalink and the IDEaS SentryNet
project are gratefully acknowledged.
REFERENCES
Altarawneh, E. and jenkin, M. (2020). System and method
for rendering of an animated avatar. US Patent
10580187B2.
Altarawneh, E., M., M. J., and MacKenzie, I. S. (2020).
Is putting a face on a robot worthwhile? In Proc.
Workshop on Active Vision and Perception in Human(-
Robot) Collaboration. Held in conjunction with the
29th IEEE Int. Conf. on Robot and Human Interactive
Communication.
Busso, C., Bulut, M., Lee, C.-C., Kazemzadeh, A., Mower,
E., Kim, S., Chang, J. N., Lee, S., and Narayanan,
S. S. (2008). IEMOCAP: Interactive emotional dyadic
motion capture database. Language Resources and
Evaluation, 42:335.
Codd-Downey, R., Forooshani, P. M., Speers, A., Wang, H.,
and Jenkin, M. (2014). From ROS to Unity: Lever-
aging robot and virtual environment middleware for
immersive teleoperation. In IEEE International Con-
ference on Information and Automation (ICIA), pages
932–936, Hailar, China.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Proc. IEEE Inter-
national Conference on Computer Vision and Pattern
Recognition (CVPR), pages 886–893, San Diego, CA.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
408

Dam, S. K., Hong, C. S., Qiao, Y., and Zhang, C. (2024).
A complete survey on LLM-based AI Chatbots. arXiv
2406.16937.
E. Altarawneh, E., Jenkin, M., and Scott MacKenzie, I.
(2021). An extensible cloud based avatar: Imple-
mentation and evaluation. In Brooks, A. L., Brah-
man, S., Kapralos, B., Nakajima, A., Tyerman, J., and
Jain, L. C., editors, Recent Advances in Technologies
for Inclusive Well-Being: Virtual Patients, Gamifica-
tion and Simulation, pages 503–522. Springer Inter-
national Publishing, Cham.
Gao, Y., Xiong, Y., Gao, X., Jia, K., Pan, J., Bi, Y., Dai, Y.,
Sun, J., Wang, M., and Wang, H. (2024). Retrieval-
augmented generation for large language models: A
survey. arXiv 2312.10997.
Ghamati, K., Banitalebi Dehkordi, M., and Zaraki, A.
(2025). Towards AI-powered applications: The de-
velopment of a personalised LLM for HRI and HCI.
Sensors, 25.
Hall, E. T. (1966). The Hidden Dimension. Anchor Books.
Jeong, H., Lee, H., Kim, C., and Shin, S. (2024). A sur-
vey of robot intelligence with large language models.
Appl. Sci., 14:8868.
Kim, C. Y., Lee, C. P., and Mutlu, B. (2024). Understanding
large-language model LLM-powered Human-Robot
Interaction. In Proc. ACM/IEEE International Con-
ference on Human-Robot Interaction (HRI), page
371–380.
Luo, J., Li, T., Wu, D., Jenkin, M., Liu, S., and Dudek,
G. (2024). Hallucination detection and hallucination
mitigation: An investigation. arXIV 2401.08358.
Macenski, S., Foote, T., Gerkey, B., Lalancette, C., and
Woodall, W. (2022). Robot operating system 2: De-
sign, architecture, and uses in the wild. Science
Robotics, 7:eabm6074.
Mower, C. E., Wan, Y., Yu, H., Grosnit, A., Gonzalez-
Billandon, J., Zimmer, M., Wang, J., Zhang, X., Zhao,
Y., Zhai, A., Liu, P., Palenicek, D., Tateo, D., Cadena,
C., Hutter, M., Peters, J., Tian, G., Zhuang, Y., Shao,
K., Quan, X., Hao, J., Wang, J., and Bou-Ammar, H.
(2024). ROS-LLM: A ROS framework for embod-
ied AI with task feedback and structured reasoning.
arXiv:2406.19741.
Poria, S., Hazarika, D., Majumder, N., Naik, G., Cambria,
E., and Mihalcea, R. (2018). Meld: A multimodal
multi-party dataset for emotion recognition in conver-
sations. arXiv preprint arXiv:1810.02508.
Schoenenberg, K., Raake, A., and Koeppe, J. (2014). Why
are you so slow? – misattribution of transmission de-
lay to attributes of the conversation partner at the far-
end. International Journal of Human-Computer Stud-
ies, 72(5):477–487.
Shoa, A. and Friedman, D. (2025). Milo: an LLM-based
virtual human open-source platform for extended re-
ality. Frontiers in Virtual Reality, 6.
Singh, S., Singh, D., and Yadav, V. (2020). Face recog-
nition using HOG feature extraciton and SVM classi-
fiere. Int. J. of Emerging Trends in Engineering Re-
search, 8.
Soleymani, M., Garcia, D., Jou, B., Schuller, B., Chang, S.-
F., and Pantic, M. (2017). A survey of multimodal sen-
timent analysis. Image and Vision Computing, 65:3–
14.
Technologies, R. C. (2005). Roscribe:
Create ROS packages using LLMs.
https://github.com/RoboCoachTechnologies/ROScribe,
accessed Jun-30-2025.
Tripathi, S., Tripathi, S., and Beigi, H. (2019). Multi-modal
emotion recognition on IEMOCAP dataset using deep
learning. arXiv 1804.05788.
Wang, C., Hasler, S., Tanneberg, D., Ocker, F., F. Jou-
blin, F., Ceravola, A., Deigmoeller, J., and Gienger,
M. (2024). LaMI: Large Language Models for Multi-
Modal Human-Robot Interaction. In Extended Ab-
stracts of the CHI Conference on Human Factors in
Computing Systems, page 1–10. ACM.
Wang, J., Shi, E., Hu, H., Ma, C., Liu, Y., Wang, X., Yao, Y.,
Liu, X., Ge, B., and Zhang, S. (2025). Large language
models for robotics: Opportunities, challenges, and
perspectives. Journal of Automation and Intelligence,
4:52–64.
Weizenbaum, J. (1966). Eliza—a computer program for
the study of natural language communication between
man and machine. Commun. ACM, page 36–45.
Wigdor, N., de Greeff, J., Looije, R., and Neerincx, M. A.
(2016). How to improve human-robot interaction with
conversational fillers. In 2016 25th IEEE Interna-
tional Symposium on Robot and Human Interactive
Communication (RO-MAN), pages 219–224.
Zhang, Z., Tsiakas, K., and Schneegass, C. (2024). Explain-
ing the wait: How justifying chatbot response delays
impact user trust. ACM Conversational User Inter-
faces 2024, page 1–16.
Leveraging ROS to Support LLM-Based Human-Robot Interaction
409
