
Pedestrian Positioning Technology Combining IMU
and Wireless Signals Based on MC-CKF
Seong Yun Cho
1a
and Jae Uk Kwon
2b
1
Department of Mechanical Engineering, Kyungil University, Gyeongsan, Republic of Korea
2
Department of IT Engineering, Kyungil University, Gyeongsan, Republic of Korea
Keywords: Maximum Correntropy, Cubature Kalman Filter, IMU, Wireless Positioning.
Abstract: In the paper, the pedestrian position is estimated by integrating the inertial measurement unit (IMU) and the
wireless signal using the Cubature Kalman filter (CKF) based on the maximum correntropy criterion (MCC).
Wireless signals may include short-range wireless communications such as ultra-wideband (UWB) signal and
mobile communication signals such as LTE/5G. UWB can measure distances with an error of less than 30 cm
in a line-of-sight (LoS) environment, but in an environment with LoS, it provides range measurements with
a wide range of non-Gaussian uncertainty errors. In this case, ia an IMU/UWB system is configured with a
conventional minimum mean square error (MMSE)-based filter, significant errors will occur. To address this
issue, this paper designed an MCC-based CKF and applied it to pedestrian positioning technology. Simulation
analysis results demonstrated that the proposed filter is robust to UWB uncertainty and enables reliable
IMUUWB integration.
1 INTRODUCTION
A system integrating an inertial measurement unit
(IMU) and wireless signals is being considered for
indoor pedestrian navigation. An IMU can be
integrated using LTE/5G-based wireless positioning
solutions or ultra-wideband (UWB)-based ranging
measurements. This paper first describes an
integration filter using UWB. UWB enables accurate
range measurements and position estimates in line-of-
sight (LoS) environments, but it is difficult to provide
accurate position information in non-line-of-sight
(NLoS) environments such as indoors because range
measurements include various uncertainty errors
(Banani et al., 2013, Cho, 2019). In order to integrate
IMU and UWB, nonlinear filters such as the extended
Kalman filter (EKF) (Brown and Hwang, 2012) and
the Cubature Kalman filter (CKF) (Arasaratnam and
Haykin, 2009) can be used to take into account the
nonlinear characteristics of inertial navigation and
ranging measurement. However, these minimum
mean square error (MMSE)-based filters do not
adequately respond to UWB uncertainties, potentially
leading to large errors. In this paper, we introduce a
a
https://orcid.org/0000-0002-4284-2156
b
https://orcid.org/0000-0001-6222-5043
maximum correntropy criterion (MCC)–based CKF
(MC-CKF) considering this issue.
MCC-based filters are designed based on a kernel
function that maximizes the similarity between the
estimates and the measurement and reflects the error
characteristics of the measurement. The sum of the
kernel function values, including the residuals
calcualted in the measurement update process, is used
as the cost function. And state variables are then
estiamted to maximize this cost function. If
uncertainty errors occur in the UWB measurement,
the MCC-based filter adjusts the P and R matrices to
minimize the impact of measurement uncertainty
errors (Chen et al., 2017, Li et al., 2022).
The purpose of this paper is to apply MCC to CKF
so that it can be used in nonlinear systems. The
designed MC-CKF is applied to a tightly coupled
IMU/UWB system for indoor pedestrian navigation.
The performance of the MC-CKF-based IMU/UWB
integrated navigation system is verified through
simulation. The simulation results confirmed the
following: When UWB measurements contain non-
Gaussian uncertainty errors (Cho, 2019), MC-CKF
significantly adjusts the R matrix corresponding to
Cho, S. Y. and Kwon, J. U.
Pedestrian Positioning Technology Combining IMU and Wireless Signals Based on MC-CKF.
DOI: 10.5220/0013830800003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 375-379
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
375

the error measurements to provide stable position
estimates. This is the contribution of this paper to the
field of indoor pedestrian navigation.
2 IMU/UWB INTEGRATION
BASED ON MC-CKF
For integration of an IMU-based inertial navigation
system (INS) with UWB, the state variables are first
set as follows:
T
LL
x Pos Vel Euler
ε
=∇
(1)
where
L
P
os
and
L
Vel
are the position and velocity
in the local level coordinate system,
Euler is the
attitude expressed in Euler angles, and
∇ and
ε
are
the accelerometer bias and gyro bias, respectively.
In CKF, these state variables are converted into
cubature points. The number of cubature points is 2N,
and since the system dimension N is 15, there are 30
cubature points.
In CKF, cubature points are time-propagated
using the following INS equations (Farrell and Marth,
1999):
11
LL L
kkk
Pos Pos Vel dt
−−
=+⋅ (2)
{
}
1,111
,1 ,1 1 1
ˆ
()
(2 )
LL Lb
kk bkkk
LL LL
ie k eL k k k
Vel Vel C f
Vel g dt
ωω
−−−−
−−−−
=+ −∇−
+×+⋅
(3)
(
{
)
}
11,11
,1 ,1 ,1
1
ˆ
2
()
b
kk k ibk k
bL L
Lk iek eLk
QQ Q
Cdt
ωε
ωω
−−−−
−− −
=+ ∗ −
−+⋅
(4)
where
b
f
and
b
ib
ω
are the accelerometer output and
gyro output, respectively,
ˆ
∇
and
ˆ
ε
are the estimated
accelerometer bias and gyro bias, respectively, and
dt
is the INS update interval.
Q
is a quaternion,
L
ie
ω
is the Earth’s angular velocity vector, and
L
eL
ω
is the
rotational angular velocity vector in the local level
coordinate system caused by the velocity.
When the ranging measurements are obtained via
UWB, the measurement-update is processed in the
CKF. The ranging measurement equation is as
follows (Cho, 2019):
22
,,
()()
xx yy
jk j k j k jk
rANPosANPosw=−+−+
(5)
where
[]
x
yT
jj
AN AN
is the position of anchor node
j,
j
P
os
is the j-axis position of the pedestrian in the
local level coordinate system, and
()wj is the noise
contained in channel
j. And {1, 2 , , }jM∈ .
In general,
w in (5) can be modelled as Gaussian
noise in LoS environments. However, in indoor
environments,
w can appear as a non-Gaussian heavy-
tailed impulse error. Considering this, the kernel
function of MC-CKF can be set as follows (Chen et
al., 2017):
22
( ) exp( / 2 )Ge e
σ
=−
(6)
where
σ
is the kernel bandwidth.
Applying a fixed-point iteration algorithm during
the measurement-update process can improve the
convergence performance of the filter. The P and R
matrices are adjusted as follows:
1
() ()
()
x
T
ki P ki P
PBC B
−−
= (7)
1
() ()
()
yT
ki R ki R
RBCB
−
= (8)
where
i is the iteration order,
T
P
Pk
B
BP
−
=
and
T
RR
B
BR=
.
k
P
−
must be computed before the
measurement-update using the time-propagated
cubature points.
()
x
ka
C
and
()
y
ka
C
are computed as
follows:
()
()
()
()
()
(1) 0
0()
x
ki
x
ki
x
ki
Ge
C
Ge N
=
(9)
()
()
()
()
()
(1) 0
0()
y
ki
y
ki
y
ki
Ge
C
Ge M
=
(10)
where
1
() ( 1)
ˆˆ
()
x
ki P k ki
eBxx
−− −
−
=− (11)
1
() ()
ˆ
()
y
ki R k ki
eByy
−−
=−
(12)
After the fixed-point iteration algorithm
completes, the state variables and error covariance
matrix are updated as follows:
1
,() ,() ()
ˆˆ ˆ
()
k k xy k i yy k i k k i
xxP P yy
−− −
=+ −
(13)
() , () , () , ()
TT
k ki xyki yyki xyki
PP P P P
−−
=− (14)
Where
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
376
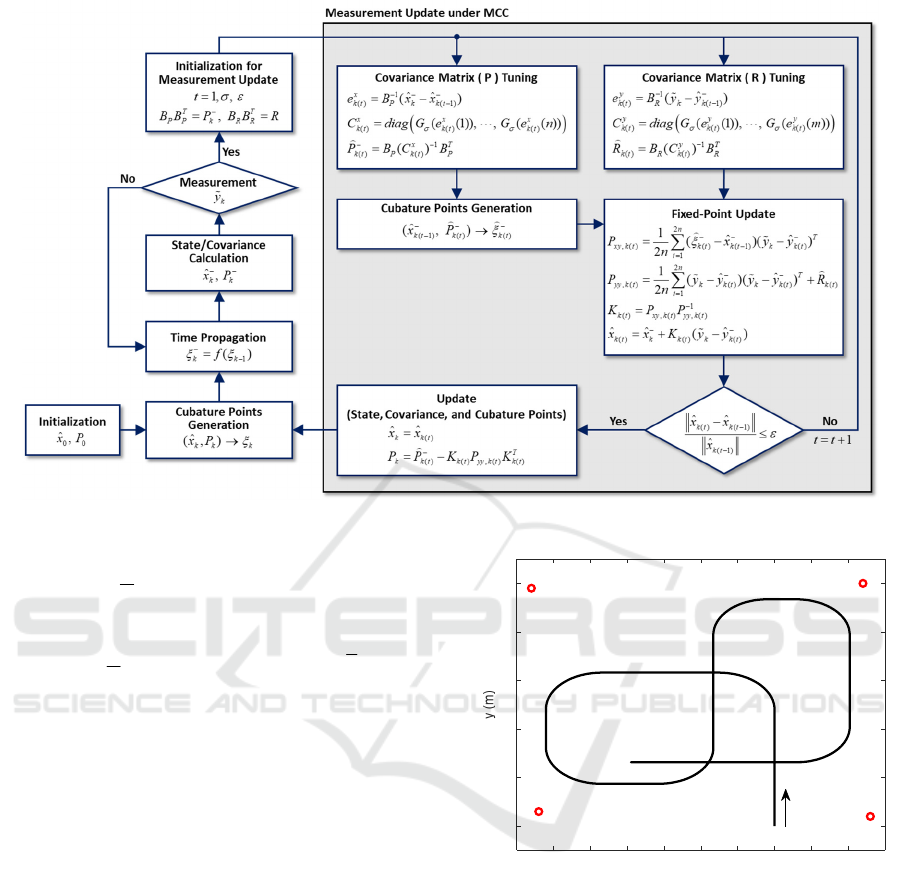
Figure 1: Flowchart of MC-CKF.
,() () ( 1) ()
1
1
ˆ
ˆ
ˆ
()()
n
T
xyki ki ki k ki
i
Pxyy
n
χ
−− −
−
=
=−−
(15)
,() () () ()
1
1
ˆˆ
()()
n
T
yyki k ki k ki ki
i
PyyyyR
n
−−
=
=−−+
(16)
where
n
is the number of the Cubature points.
The proposed filter can be summarized as shown
in Figure 1.
3 SIMULATION ANALYSIS
A simulation was conducted to analyse the
performance of an MC-CKF-based IMU/UWB
integrated pedestrian navigation system in an indoor
space. The pedestrian’s walking trajectory was set as
shown in Figure 2, with four anchor nodes.
The simulation assumes two scenarios: the first is
a LoS environment where only noise exists in the
measurements, and the second is an NLoS
environment where the measurements include biases,
impulse errors, and ramp errors (Cho, 2019).
Figure 2: Simulation trajectory.
Figure 3 shows the results performed in a LoS
environment, and Figure 4 shows the results
performed in an NLoS environment.
In the first simulation, only noise exists in the four
range measurements, so little adjustment of R matrix
is made. Additionally, the positioning results of CKF
and MC-CKF are almost the same, and the heading
estimation performance is slightly improved in MC-
CKF.
0 5 10 15 20 25 30 35 40 45 50
x (m)
0
10
20
30
40
50
AN-1
AN-2
AN-3
AN-4
Pedestrian Positioning Technology Combining IMU and Wireless Signals Based on MC-CKF
377

(a) measurement error
(b) square root of adjusted R matrix
(c) position error
(d) heading error
Figure 3: Simulation result in the LoS environment.
In the second simulation, the four range
measurements include not only noise but also impulse,
bias, and ramp errors. Consequently, the adjusted R
matrix of MC-CKF accurately reflects the error
characteristics of each measurement. As a result,
while CKF incurs large position and heading errors
due to the measurement errors, MC-CKF estimates
position and heading information with the same
accuracy as in a LoS environment.
(a) measurement error
Figure 4: Simulation result in the NLoS environment.
Rng-1 (m)Rng-2 (m)Rng-3 (m)Rng-4 (m)
(1, 1) (m)(2, 2) (m)(3, 3) (m)(4, 4) (m)
0 102030405060
time (sec)
0
0.5
1
1.5
2
2.5
CKF
MC-CKF
0 102030405060
time (sec)
-10
-8
-6
-4
-2
0
2
4
6
8
10
CKF
MC-CKF
0 102030405060
0
2
4
6
0 102030405060
0
2
4
6
0 102030405060
0
2
4
6
0 102030405060
time (sec)
0
2
4
6
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
378
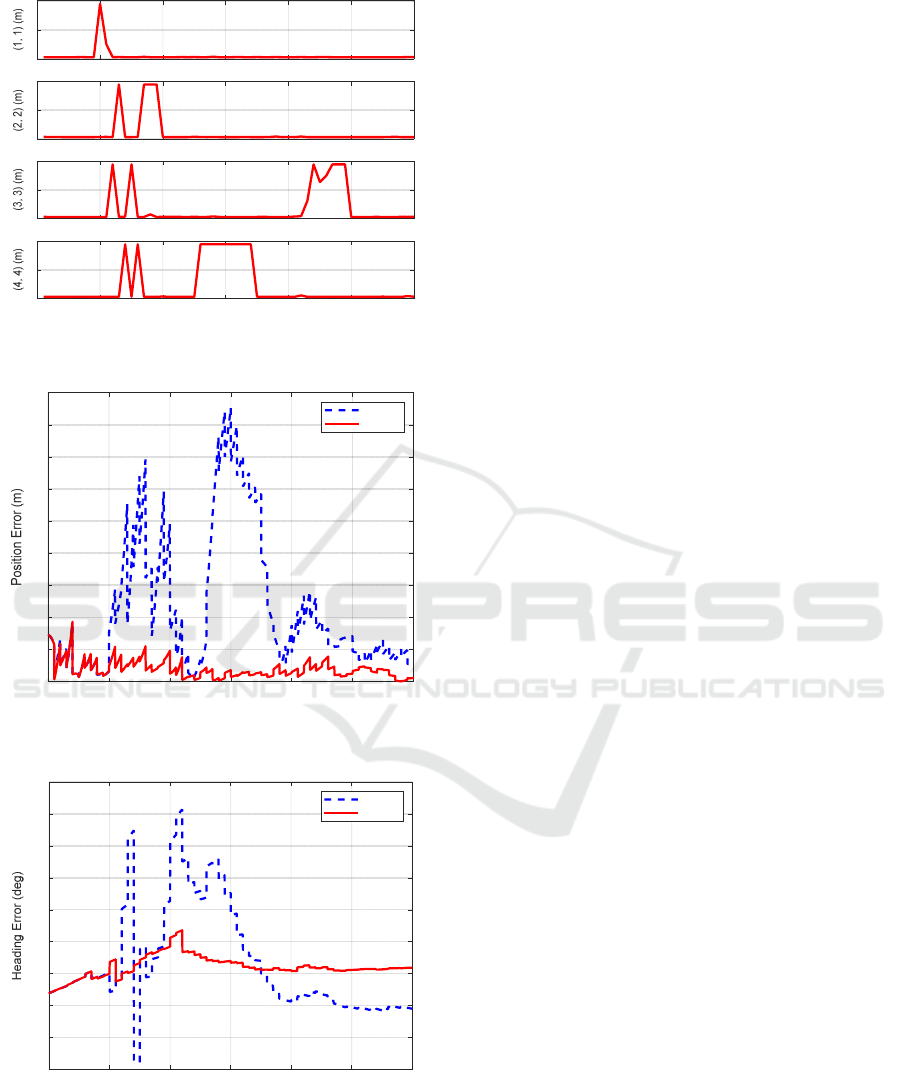
(b) square root of adjusted R matrix
(c) position error
(d) heading error
Figure 4: Simulation result in the NLoS environment
(cont.).
4 CONCLUSIONS
This paper discusses a navigation technology that
integrates an IMU and wireless signals for indoor
pedestrian positioning. UWB uses wireless signals to
measure range information. While range
measurements in LoS environments are only subject
to noise, NLoS environments include bias, impulse,
and ramp errors. In these environments, filters such
as EKF and CKF generate significant positioning
errors. To address this issue, we propose MC-CKF.
This filter recognizes measurement errors and adjusts
the R matrix for each channel. Simulation results
demonstrate that the same positioning accuracy is
maintained in NLoS environments as in LoS
environments.
ACKNOWLEDGEMENTS
This work was supported by Protection Technology
for Socially Vulnerable Individuals Program (www.
kipot.or.kr) funded by Korean National Police
Agency(KNPA, Korea) [Project Name: Development
of an Integrated Control Platform for Location
Tracking of Crime Victim based on Low-Power
Hybrid Positioning and
Proximity Search Technology
/ Project Number: RS-2023-00236101].
REFERENCES
Arasaratnam, I., Haykin, S. (2009). Cubature Kalman
filters, IEEE Trans. Automatic Control, vol. 54, pp.
1254-1269.
Banani, S. S., Najibi, M., Vaughan, R. G. (2013). Range-
based localization and tracking in non-line-of-sight
wireless channels with Gaussian scatterer distribution
model, IET Communications, vol. 7, pp. 2034-2043.
Brown, R. G., Hwang, P. Y. C. (2012). Introduction to
random signals and applied Kalman filtering, John
Wiley & Sons, NJ.
Chen, B., Liu, X., Zhao, H., Principe, J. C. (2017).
Maximum correntropy Kalman filter, Automatica, vol.
76, pp. 70-77.
Cho, S. Y. (2019). Two-step calibration for UWB-based
indoor positioning system and positioning filter
considering channel common bias, Measurement
Science and Technology, vol. 30, pp. 025003.
Farrell, J. A., Barth, M. (1999). The global positioning
system & inertial navigation, McGraw-Hill, New York.
Li, X., Guo, Y., Meng, Q. (2022). Variational vayesian-
based improved maximum mixture correntropy Kalman
filter for non-Gaussian noise, Entropy, vol. 24, pp. 117.
0 102030405060
0
5
10
sqrt(Tuned R matrix)
0 102030405060
0
5
10
0 102030405060
0
5
10
0 102030405060
time (sec)
0
5
10
0 102030405060
time (sec)
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
CKF
MC-CKF
0 102030405060
time (sec)
-15
-10
-5
0
5
10
15
20
25
30
CKF
MC-CKF
Pedestrian Positioning Technology Combining IMU and Wireless Signals Based on MC-CKF
379
