
Adaptive Output Control with a Guarantee of the Specified Control
Quality
Nikita Kolesnik
a
Institute for Problems in Mechanical Engineering of the Russian Academy of Sciences (IPME RAS),
Saint-Petersburg, Russia
Keywords: Dynamic System, Adaptive Control, Tube Method, Coordinate Replacement, Arbitrary Degree.
Abstract: The paper presents a modification of the classical algorithm of adaptive output control in order to guarantee
that the signal is found in the set specified by the developer at any moment of time. The paper extends the
algorithm to systems with arbitrary relative degree. The aim of current research is to design a control law that
will ensure that the error between the output and the reference signal will be in the following set. The
effectiveness of the proposed method is illustrated with mathematical modelling.
1 INTRODUCTION
Adaptive control is widely used in control with
parametric uncertainty of plant and external bounded
disturbances. Often, the goal of adaptive control is to
stabilise the output of plant in a limited set for a finite
time (Anderson,1985), (Annaswamy, 2021). To date,
new adaptive algorithms have been developed to
improve the quality of transients and reduce
computational costs (Narendra, 2012
),
(Ioannou,
2012).
Plants with unit relative degree are often studied
in the literature and can describe the process of liquid
filling in tanks (Arslan, 2001), transmission dynamics
in a mechanical gearbox (Farza, 2009), dynamics of
oscillating systems (
Khalil, 2001)
, etc. It is important
that the same structure of the adaptive control law can
be obtained for such objects by different control
methods (direct compensation method, velocity
gradient method (Chopra, 2008), (Campion, 1989)
etc.), (Gnucci, 2021).
Nonlinear control methods (
Furtat, 2021)
have
been proposed earlier with the guarantee of finding
the output variables in the given sets. However, these
methods are applicable under the conditions of known
parameters of the plant, the model of which has unit
relative degree.
The paper is organized as follows. Section 2
formulates the problem of adaptive tracking with
a
https://orcid.org/0000-0002-8630-4202
constraints on the output variable. In Section 3, a
control law is first synthesized under the assumption
that the derivatives of the plant's output signal are
available for measurement. This solution is then
generalized to the case when these derivatives are
unmeasurable. Section 4 presents a numerical
simulation that demonstrates the effectiveness of the
proposed solution.
2 PROBLEM STATEMENT
Consider the dynamical system
()() ()() (),Qpyt kRput ft=+
(1)
where 𝑡≥0, 𝑢(𝑡) ∈ ℝ is the control signal, 𝑦(𝑡) ∈
ℝ is the measurable output signal, 𝑓(𝑡) ∈ ℝ is a
bounded disturbance, 𝑄(𝑝) and 𝑅(𝑝) are linear
differential operators with constant coefficients and
orders 𝑛 and m respectively, the coefficients of 𝑄(𝑝)
and 𝑅(𝑝) are unknown, 𝑘>0 is a known high-
frequency gain, 𝑝=𝑑/𝑑𝑡, and the plant (1) is
minimum-phase.
Consider the reference model:
() () ()
,
mmr
Tpy t kg t=
502
Kolesnik, N.
Adaptive Output Control with a Guarantee of the Specified Control Quality.
DOI: 10.5220/0013823900003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 502-508
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
where 𝑇(𝑝) is a known normalized Hurwitz
polynomial with real coefficients, 𝑔
(
𝑡
)
is a
piecewise continuous, bounded reference signal,
𝑦
(
𝑡
)
is the output of the reference model, 𝑘
>0
The aim of the research is to design a control law
that will ensure that the output error signal 𝑒
(
𝑡
)
=
𝑦
(
𝑡
)
−𝑦
(𝑡) is found in the following set of
{
}
() () () for any 0,Egtetgt t=<< ≥
(2)
where
g(t)
and
g
(
t
)
are bounded functions with their
first time derivatives. These functions are chosen by
the designer based on the requirements of the system
operation.
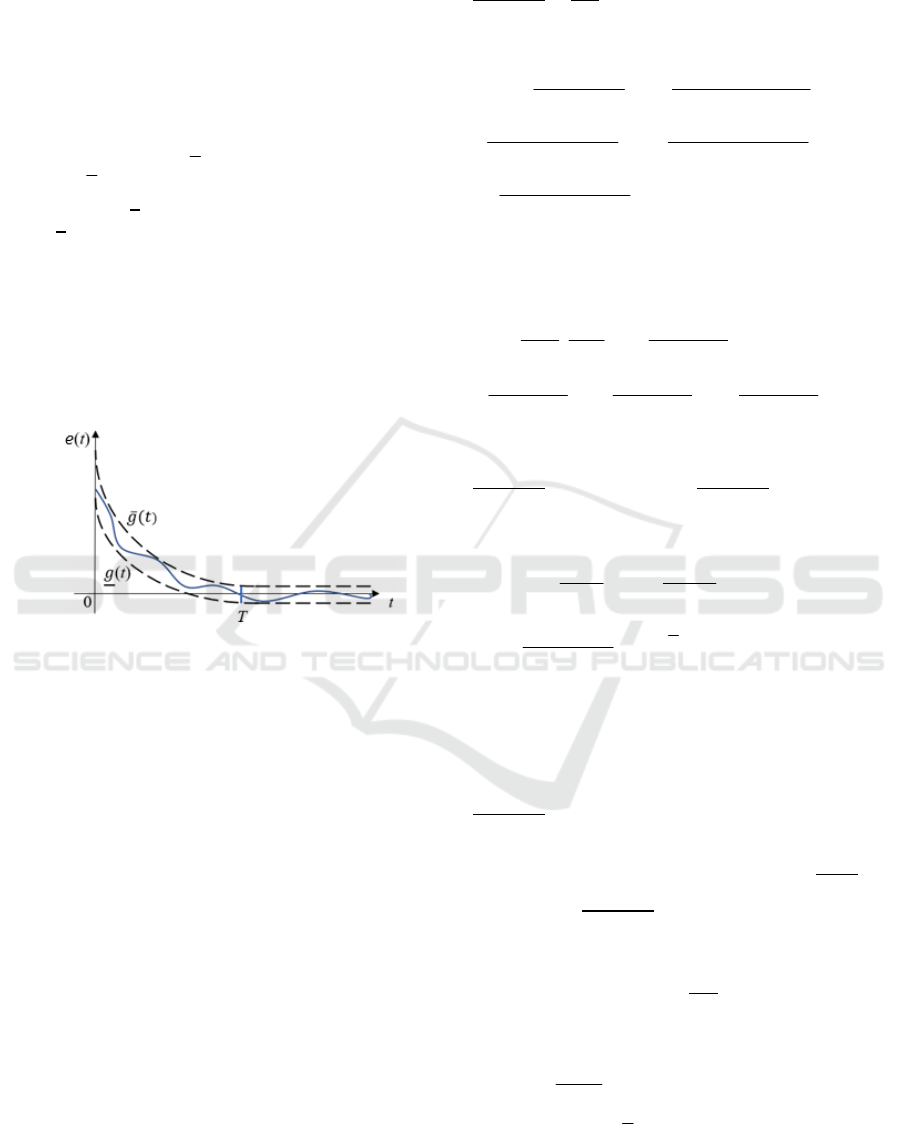
For example (see Figure 1), one can guarantee
transients in a given tube whose boundaries
monotonically converge to the neighbourhood of zero
in a given time 𝑇. The description will be clearly
demonstrated in the appendix at the end of the paper.
Figure 1: An illustration of output error.
3 SOLUTION
Let us represent the operators in (1) as the following
sums:
(), ()() () ,
mm
Rp Q QpR pQ
p
R =+ =+ΔΔ
(3)
where 𝑅
(𝑝) and 𝑄
(𝑝) are known differential
operators of orders m and n, respectively, and 𝑅
(𝜆)
and 𝑄
(𝜆) are Hurwitz operators, 𝛥𝑄
(
𝑝
)
and 𝛥𝑅
(
𝑝
)
are polynomials of orders not exceeding 𝑛−
1 and 𝑚 − 1, respectively.
For plant (1), we define a reference model of the
form
( ) () ( ) (),
mm mmr
Qpyt kRpgt=
(4)
Let the control law be
() ( ) (),ut T p t
υ
=
(5)
where T(p) is chosen so that the transfer function
()()
()
=
has unit relative degree. Considering
(3), (5), let us rewrite (1) as
()() ()() ()
() ()
()() () ()()
()() ()() ()
() ()
() ()() () ()()
()()
(),
() ()
)
()
(
mm
mmm
mm
mm mm
m
mm
kR p T p kR p T p R p
tt
QpTp QpRpTp
kR p T p kR p T p Q p
f
tyt
QpRpTp QpRpTp
kR p T p
t
QpRpTp
yt
υ
∈
υ
Δ
++
Δ
−+
+
=
(6)
where
(𝑡)
is the exponentially decaying function
due to nonzero initial conditions.
Substituting (5) into (6), we obtain
1()
() ()
() ()(
(
)
() 1 1
() () () .
()() ()() ()()
)
m
mm m
kp
tt
p aTp R pTp
p
yt f t t
RpTp RpTp R
R
pT
t
Q
p
y
υυ
∈
Δ
+−
+
+
Δ
−
=
+
(7)
Having isolated the integer part in the summand
(
)
(
)
(
)
𝑦
(
𝑡
)
=с
𝑦
(
𝑡
)
+
(
)
(
)
(
)
𝑦
(
𝑡
)
, we
transform (7) to the form of
01
()
() () ()
()
()
(
()
)()(),
()()
m
m
kp
ttyt
pa Rp
p
yt f t t
Rp
R
yt с
Q
Tp
υυ
∈
+−
Δ
−
+
−+
=
Δ
+
(8)
where 𝑐
is the integer part remaining when dividing
Δ𝑄
(
𝑝
)
to 𝑅
(
𝑝
)
𝑇
(
𝑝
)
,𝑐
are coefficients of the
polynomial 𝛥𝑄
(
𝑝
)
, 𝑐
are coefficients of the
polynomial 𝛥𝑅(𝑝) taken with opposite sign. 𝑓
̅
(𝑡) =
(
)
()
𝑓(𝑡) is a new bounded disturbance due to
the boundedness of the original function 𝑓(𝑡) and
Hurwitz polynomial 𝑅
(
𝜆
)
𝑇
(
𝜆
)
. 𝜁
(
𝑡
)
=
(
)
𝑣(𝑡)
and 𝜁
(
𝑡
)
=
(
)
(
)
𝑦(𝑡) represent the filtered
signals at the output of the respective systems. When
dealing with the tracking problem, we additionally
consider the filter 𝜁
(
𝑡
)
=
(
)
𝑔
(
𝑡
)
.
Given (7), let us rewrite (8) as
01 02
03
() () ()
() () () .
T
T
y
k
ссytytt
pa
tf tс t
υ
υζ
ζ∈
=−−−
+
−++
(9)
Let us introduce the notations
Adaptive Output Control with a Guarantee of the Specified Control Quality
503

0010203
,
,
,,,
() () () (), (),,
() () (),
TTT
m
m
T
yr
tt
k
cccc
k
yt g tt
et yt y t
υ
ζζω
=
=−
=−
(10)
where 𝑐
is the vector of constant unknown
parameters, 𝜔(𝑡) is the regression vector.
Taking into account (9) and (10), let us write the
dynamics of the error 𝑒(𝑡) as follows
0
() () () () ())(.
T
et aet k f tcttt
υω ∈
=− + − +
+
(11)
According to (Annaswamy, 1998) and (Furtat,
2021) to solve the control problem with given
constraints, we introduce a replacement of the output
variable 𝑦 in the form of
() ()
() ( (),)
1
,
g
te gt
et t t
e
ε
ε
ε
+
=Φ =
+
(12)
where 𝜀(𝑡) ∈ ℝ is a continuous-differentiable
function with respect to 𝑡,Φ(𝜀,𝑡) satisfies the
following conditions:
(a)
g
(
𝑡
)
<Φ𝜀
(
𝑡
)
<
g
(𝑡) for any 𝑡≥0 and
𝜀(𝑡) ∈ ℝ;
(b) there exists an inverse mapping 𝜀(𝑡) =
Φ
(𝑒,𝑡) for any 𝑒∈𝐸 and 𝑡≥0;
(c) the function Φ(𝜀,𝑡) is continuous-
differentiable with respect to 𝜀 and 𝑡 and
(,)
≠0
for any 𝑒∈𝐸 and 𝑡≥0;
(d) the function
(,)
is bounded at 𝑡≥0 for any
𝜀
(
𝑡
)
∈ℝ. In that case
(,)
=
(
g
g
)
(
)
according to
(12).
Now let us determine the dynamics on the variable
𝜀 to investigate the stability of the closed-loop system.
For this purpose, we find the full time derivative of
(12) as
(,) (,)
() .
tt
et
t
εε
ε
ε
∂Φ ∂Φ
=+
∂∂
Since
(,)
≠0, taking into account (12), let us
rewrite the last equality as
(
1
0
(,)
()() ()
(,)
() () .
T
t
ae t t t
t
t
c
ft
t
ε
ευω
ε
ε
∈
−
∂Φ
=−+−
∂
∂Φ
+
++ −
∂
(13)
That is, by using the coordinate transformation
(13), the original problem with constraints is reduced
to a problem without constraints. Now it is necessary
to synthesise a control law 𝑢 that provides input-state
stability of the system (11).
Suppose that the derivatives of 𝑒(𝑡) are available
for measurement. Let us define an estimation of
axillary control signal 𝑣
(
𝑡
)
. Then consider the control
law in the form of
() ( ) ()
() () ()
()
,
1(,)
() ,
T
ut T p t
t
tttaet t
kt
c
υ
ε
υω αε
=
∂Φ
=+−
∂
+
(14)
where 𝑐(𝑡) is bounded vector of adjustable
parameters, 𝑎>0.
Substituting (14) into (13), we obtain
()
1
0
(,)
() () () .()()
T
t
ttftcc t
ε
εαεω∈
ε
−
∂Φ
=−+ +
∂
−+
(15)
Let us formulate a theorem, the result of which
will be valid with the assumption that the derivatives
of 𝑦(𝑡) are measurable.
Theorem 1: Let the conditions (a)-(d) be satisfied,
Ф
(
,
)
for any 𝜀 and 𝑡, and 𝑠𝑢𝑝
Ф
(
,
)
<∞ and the
derivatives of 𝑒(𝑡) are measurable for the
transformation (12) and bounded. Then for any 𝛼 >
0,𝛽 > 0,𝛾 > 0, the control law (14) together with
the adaptation algorithm
1
(,)
() () () ()
t
ct t t с t
ε
βεωγ
ε
−
∂Φ
=− −
∂
(16)
guarantees that the output error signal 𝑒(𝑡) belongs to
the set (2).
Let us rewrite the control law (14) taking into
account that the derivatives of 𝑒(𝑡) are not
measurable:
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
504

() ( ) ()
()
() () ()
() () ()
()
00
2
0
1
12
0
21
,
()
() ( )
1(,)
() .
0
,
00
, , ..., ,
T
T
ut T p t
tLt
tGtD t t
t
tttaet t
kt
I
G
d
d
D
c
d
γ
γ
γ
υ
υξ
ξξ υυ
ε
υω αε
μ
μμ
−
−
−
=
=
=+ −
∂Φ
=+−
∂
=
=− − −
+
(17)
where the numbers 𝑑
,…,𝑑
are chosen so that the
matrix 𝐺=𝐺
−𝐷𝐿 is Hurwitz, 𝐷
=
𝑑
,…,𝑑
,𝜇 > 0 is a sufficiently small number.
Let us introduce vectors
𝜃
(𝑡)=𝑣(𝑡),...,𝑣
()
(𝑡) and 𝜂
(
𝑡
)
=𝛤
𝜉
(
𝑡
)
−
𝜃
(
𝑡
)
, 𝛤 = 𝑑𝑖𝑎𝑔
𝜇
,...,𝜇,1
.
Finding the derivative of 𝜂
(
𝑡
)
, we obtain
2
()
(), (
1
)()(() () ().)tGtb Lttttt
γ
γ
ηη μηυ
μ
υυυ
−
Δ=−==−
(18)
Let us rewrite the equation with respect to the output
𝛥𝜐(𝑡):
2
(), ()
1
() () ().ttG Lttb t
γ
ηη υ
μ
υμη
−
Δ==−
(19)
Here
(1)
2
11
1
() () , 2,..., 1,
( ) ( ), [1 / ,0,...,0]
()/
.
i
i
ii
T
tt i
tb
t
t
γ
γ
ηη μ γ
ηη
υ
μ
−
−
−
−
=− = −
==
Then, based on the control law (17), we reduce the
error equation (16) to the form
0
2
() () () ()
())() (.
T
et aе tk t t
ft t
c
kL t
γ
μ
υ
∈η
ω
−
+
=− + −
++ +
(20)
Theorem 2: Let the conditions (a)-(d) be satisfied
for the transformation (17),
(
,
)
>0 for any 𝜀 and
𝑡, and 𝑠𝑢𝑝
Ф
(
,
)
<∞ and the derivatives of 𝑒(𝑡)
are not measurable. Then there exists such 𝜇<𝜇
that for any 𝛼>0,𝛽>0,𝛾>0, the control law (17)
together with the adaptation algorithm (16)
guarantees that the output error signal e(𝑡) belongs to
set (2).
4 EXAMPLES
Consider the plant (1) with Q(p) and R(p) given in the
form of
() ( ) ()
2
1 и 3,Qp p Rp=− =
The disturbance is represented as 𝑓(𝑡) = 7+
5𝑠𝑖𝑛(3𝑡)+4𝑐𝑜𝑠(2𝑡)+𝑑(𝑡), where 𝑑
(
𝑡
)
=
𝑠𝑎𝑡𝑑
(
𝑡
)
, 𝑠𝑎𝑡
⋅
is the saturation function, 𝑑
(𝑡) is
white noise modelled in Matlab Simulink using the
‘Band-Limited White Noise’ block with a noise
power of 1 and a sampling period of 0.2. The
disturbance is passed through a first order aperiodic
filter for smoothing. The graph of the disturbance is
shown in Figure 2a.
The reference model is given in the form
2
1
(), () 5cos(1.7 3)sin(0.5).
(1)
()
rrm
g
tgt t t
p
yt =
+
=+
We choose 𝑇
(
𝑝
)
=𝑝+1. Hence the number 𝑎 in
(17) is 1, and the filters 𝜁(𝑡) take the form:
11
() , () .
11
yg
tt
pp
ζζ
==
++
One filter is eliminated since
deg 𝑅
(𝑝) = 0.
The regression vector is then equal to
,,() () () (), () ,
T
yr
ttttygt
υ
ζζω
=
Let's form the control action (17) as
() () ()
() () ()
()
()
1
() ( )
0.01
1(,)
() ,
1.
T
tt tt
t
tttaet t
kt
ut
c
ξξ ξυ
ε
υω αε
ξ
=− −
∂Φ
=+−
∂
=+
+
In (2) we define
𝑔̄(𝑡) = 5𝑒
.
+0.3, 𝑔
̱
(𝑡) =
0.2𝑒
.
−0.3. In the control law we set 𝑎=1,𝛼=
10
and 𝑘=1. In the adaptation algorithm (16), we
choose
𝛽=10 and 𝛾=10. The initial conditions
𝑦
(
0
)
=𝑦
(
0
)
=3
. We take all other initial
conditions in the closed-loop system as zero.
Figure 2 shows the graphs:
disturbances (a), control
signal (b), output signal (c), control error
𝑒(𝑡)
transient with limiting functions (d).
Adaptive Output Control with a Guarantee of the Specified Control Quality
505

a) b)
c
)
d
)
Figure 2: Plant 1 - a) graph of disturbances; b) graph of
control signal; c) graph of output signal; d) graph of output
signal error with limiting functions
𝑔
(
𝑡
)
and 𝑔
(
𝑡
)
, defining
the quality of transient.
The advantage of the proposed algorithm, in
contrast to (Chopra, 2008), (Campion, 1989),
(Gerasimov, 2015) and other classical algorithms is
obvious: the transients are always contained in the
tube (2), the boundaries of which can define the
quality of the transients. Thus, the obtained processes
almost exponentially decay to the limit set (-0.1; 0.1)
in time 1.5 s., while the algorithms mentioned above
are not controllable in terms of transient process and
transient process time, as well as it is impossible to
determine a priori the quality of the output variable in
steady state.
As an example, consider the plant (1) with other
parameters:
() ()
() ()
32
32
4 +2 1 and 2,
+6 8 6 and 1.5 0.5.
Qp p p p Rp
Qp p p p Rp p
=− − =
=−+ =+
The error of the systems are shown in Figure 3 (a)
and (b) respectively.
a
)
b)
Figure 3: Graphs of the output signal error with limiting
functions
𝑔
(
𝑡
)
and 𝑔
(
𝑡
)
: a) plant 2; b) plant 3.
5 CONCLUSIONS
In this paper, the methods of classical adaptive
control (Fradkov, 1999) and the method of nonlinear
control (Annaswamy, 2021) are applied, which
allowed us to create a new method of adaptive control
that guarantees a given quality of transient throughout
the whole process. At first, the new method is used to
transform the problem with constraints to a problem
without constraints. Then the classical method of
adaptive control is applied.
The simulation results confirmed the theoretical
conclusions and showed that in classical adaptive
control schemes at different parameters of the plant,
significantly different uncontrolled transient are
observed, while in the new control scheme at the
same parameters, the almost given quality of
transients is guaranteed.
ACKNOWLEDGEMENTS
The research was carried out with support of the grant
of the Russian Science Foundation № 25-19-20075,
https://rscf.ru/project/25-19-20075/ in IPME RAS.
REFERENCES
Annaswamy, A. M., Fradkov. A.L, (2021). A Historical
Perspective of Adaptive Control and Learning.
Annual
Reviews in Control, 52
, 18–41.
Arslan, G., Basar, T. (2001). Disturbance attenuating
controller design for strict-feedback systems with
structurally unknown dynamics.
Automatica, 37(8),
1175–1188.
Brusin, V.A. (1994) On a class of singularly disturbed
adaptive systems.
Avtomat. i Telemekh., 1995, no. 4,
119–129; Autom. Remote Control,
56:4 (1995), 552–
559.
Campion, G., Bastin, G. (1989). Analysis of an adaptive
controller for manipulators: Robustness versus
flexibility.
Systems & Control Letters, 12(3), 251–258.
Chopra, N., Spong, M. W. (2008). Output synchronisation
of nonlinear systems with relative degree one. In
Recent
advances in learning and control
(Vol. 371, pp. 51–64).
Springer. https://doi.org/10.1007/978-1-84800-155-8_4
Farza, M., M'saad, M., Maatoug, T., & Kamoun, M. (2009).
Adaptive observers for nonlinearly parameterised class
of nonlinear systems.
Automatica, 45(10), 2292–2299.
Fradkov, A. L., Miroshnik, I. V., & Nikiforov, V. O. (1999).
Nonlinear and adaptive control of complex systems.
Nauka.
Furtat, I. B. (2013). Robust synchronisation of the structural
uncertainty nonlinear network with delays and
disturbances.
IFAC Proceedings Volumes, 46(11), 227–
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
506

232. https://doi.org/10.3182/20130703-3-FR-4038.000
60
Furtat I., Gushchin P. (2021) Nonlinear feedback control
providing plant output in given set.
International
Journal of Control
. https://doi.org/10.1080/002071
79.2020.18613
Furtat, I., Gushchin, P., Nguen B. (2024) Nonlinear control
providing the plant inputs and outputs in given sets.
European Journal of Control 76(9)
10.1016/j.ejcon.2023.100944
Gerasimov, D. N., Lyzlova, M. V., & Nikiforov, V. O.
(2015). Simple adaptive control of linear systems with
arbitrary relative degree.
2015 IEEE Conference on
Control Applications (CCA)
, 1668–1673.
https://doi.org/10.1109/CCA.2015.7320849
Gnucci, M., & Marino, R. (2021). Adaptive tracking control
for underactuated mechanical systems with relative
degree two.
Automatica, 129, 109633.
https://doi.org/10.1016/j.automatica.2021.109633
Ioannou, P. A., Sun, J. (2012).
Robust adaptive control.
Courier Corporation.
Khalil, H. K. (2002).
Nonlinear systems (3rd ed.). Prentice
Hall.
Narendra, K. S., Annaswamy, A. M. (2012).
Stable
adaptive systems
. Courier Corporation.
Tsykunov, A. M. (2015). Robust control of a plant with
distributed delay.
Control Sciences, 76, 721–731.
APPENDIX
Proof of Theorem 1. Let us define a Lyapunov
function of the form
()()
()
2
1
00
2
1
22
((),)
,
()
T
m
t
k
V
ss
Hs
c
ds
s
ccc
ε
β
ε
∈
ε
−
∞
=+ − −+
∂Φ
+
∂
(A1)
where
𝐻 > 0. Let us find the full time derivative of
(A1) using expressions (13) and (15). As a result, we
obtain
()
1
1
2
0
(,)
() () ()
(,)
().
mm
T
m
t
Vtkftkt
t
kcccH t
ε
εαε ∈
ε
γε
∈
βε
−
−
∂Φ
=++−
∂
∂Φ
−−−
∂
−
(A2)
Let us use the following estimates from above and the
relation:
() ()()
0
22
0
2
00
2
0
1
() () 0,5 () () ,
1
() () 0,5 () () ,
0.5 .
T
TTT
tft t f t
tt t
cc c
t
сссccc cc
εεν
ν
ε∈ ε ν∈
ν
≤+
≤+
−= − −+−
(A3)
Given (A3), let us evaluate (A2) in the form
{}
()()
1
2
22
22
00
2
00
(,) 1
() 0,5 () sup
1
0,5 ( ) ( ) ( )
.
22
m
m
T
TT
m
t
Vtktf
kttHt
k сс сс сс сс
ε
αε ε ν
εν
εν∈ ∈
ν
γγ
ββ
−
∂Φ
≤−+ ++
∂
++−−
−−−++
It follows from the previous equation that if the
conditions are fulfilled
{}
()
()
2
2
00
Ф,
0,5 sup 0,5 sup
2
,
,
0,5
T
mm
m
m
m
t
kf kHс c
k
k
Hk
ε
γ
ν∈ν
βε
ε
α
ν
α
ν
ν
∂
+−+
∂
>
−
<
<
the derivative of the Lyapunov function will be
negative. Thus, it is clear from the equation that there
always exist α and H that ensure this condition. It
follows from condition (b) that the transformation
(15) guarantees the fulfilment of condition (2). As a
result, function
𝑉 is bounded and therefore C is
bounded. Theorem 1 is proved.
Proof of Theorem 2. Let us rewrite equations (19),
(20) in the form:
1
2
12
() () () ()
(),
(,
() (),
()
)
() ()
(
((
)
)),
T
с ket aе tLt
tG
ktftt
t
t
ct t t
t
с t
b
γ
μη
μη η
ω∈
υ
ε
βεωγ
ε
μ
−
−
=− + + +
∂Φ
=− −
+
∂
=−
(A4)
where
𝜇
=𝜇
=𝜇. Let us use the lemma (Brusin,
1994).
Lemma (Brusin, 1994). If a system is described by
equation
𝑥 =𝑓
(
𝑥,𝜇
,𝜇
)
,𝑥∈𝑅,
where 𝑓
(
𝑥,𝜇
,𝜇
)
is a continuous function that is Lipschitz on
𝑥, and at
𝜇
=0 has a bounded closed dissipativity area 𝛺
=
𝑥
|
𝐹
(
𝑥
)
<𝐶
,
where 𝐹
(
𝑥
)
is a positively defined,
continuous piecewise smooth function, then there
exists such
𝜇
>0 that at 𝜇
<𝜇
the original
system has the same dissipativity area
𝛺
if for some
Adaptive Output Control with a Guarantee of the Specified Control Quality
507

numbers 𝐶
and 𝜇̅
with 𝜇
=0 the following
condition is fulfilled
11
11
()
sup ( , ,0) ,
T
Fx
f
xC
x
μμ
μ
≤
∂
≤−
∂
(A5)
when 𝐹
(
𝑥
)
=𝐶.
Let us take the Lyapunov function
V
=
η
(
t
)
H
η
(
t
)
,H
=H
>0 is determined from the
solution of the equation
H
G+G
H
=−Q
, where
Q
=Q
>0, then considering (A.4) we obtain 𝑉
=
−
η
(
t
)
Q
(
t
)
with μ
=0. It means that at 𝜇
=0
we obtain the original equations (11), (16) to which
we add the independent equation
𝜇
𝜂̅
(
𝑡
)
=𝐺𝜂̅
(
𝑡
)
with asymptotically stable variable
𝜂̅
(
𝑡
)
. Hence, for
the initial system we have a dissipativity region
𝛺
with an attraction region
𝛺
.
Let us take the Lyapunov function as a function
𝐹(𝑥)
2
13
42
() () () () ()
() () () (),
TT
yy
TT
k
Fhet ctct tH t
tH t tH t
υυ
ζζ
ρ
ζζηη
=+ + +
++
(A6)
where ℎ
>0, 𝐻
,𝐻
,𝐻
are positively defined
symmetric matrices.
Let us set the number C such that the surface
𝐹
(
𝑥
)
=𝐶, where 𝑥
(
𝑡
)
=𝑐,𝜂̅
,𝜁
,𝜁
is boundedly
closed, is in the area
𝛺 on the variables 𝑥
(
𝑡
)
, and
since the set
𝛺
lies in the open area 𝑉
(
𝑥
)
<𝐶 and
the system is dissipative, the variables
𝑥
(
𝑡
)
will tend
to attraction area
𝛺
, and hence there exists a number
𝐶
for which (A5) is satisfied. The rate of
convergence of the variables
𝜂̅
(
𝑡
)
to zero will depend
on the choice of
𝜇
. Therefore, according to the
lemma (Brusin, 1994), there exists
𝜇
>0 such that
at
𝜇<𝜇
the dissipativity area of the system (17),
(19), (20) remains the area
𝛺. Theorem 2 is proved.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
508
