
Digital Transformation of the Nuclear Industry:
Leveraging Robotics, AI, and Digital Twins for Standardised,
Safe, and Efficient Operations
Abdenour Benkrid
a
, Omar Zahra
b
, Réka Szőke
c
, Ankur Shukla
d
and István Szőke
e
Institute for Energy Technology, OS alle 5, 1777 Halden, Norway
Keywords: Digital Transformation, Nuclear Back-end, Robotics, Artificial Intelligence (AI), Digital Twins (DT), Safety,
Building Information Modelling (BIM), Decommissioning, Waste Management, Security, Cybersecurity.
Abstract: The nuclear back-end is experiencing a pivotal digital transformation driven by the integration of robotics,
artificial intelligence (AI), and digital twin (DT) technologies. These innovations hold strategic potential to
enhance safety, efficiency, and standardisation across decommissioning, waste management, and site
remediation. Using the Technical, Economic, Commercial, Organisational, and Political framework (TECOP)
and Five Case Models, this paper critically assesses the value, deployment readiness, and integration barriers
of these digital tools across technical, organisational, and regulatory domains. Emphasis is placed on robotics
in 5D contexts, the nuclearization challenge, and the role of DT and Building Information Modelling (BIM)
in scenario planning and compliance. Persistent obstacles, including fragmented certification, cybersecurity
vulnerabilities, limited interoperability, and resistance to change, are analysed using data from expert surveys
and project experience. Targeted strategies are proposed to address these issues and accelerate technology
readiness and regulatory harmonisation. The contributions of EU-funded initiatives such as HARPERS,
DORADO, and XS-Ability are highlighted as catalysts for safe and scalable digital innovation. By providing
actionable recommendations, this paper supports policymakers, industry leaders, and technology developers
in advancing the digital evolution of the nuclear back-end.
1 INTRODUCTION
The nuclear back-end encompassing decommissioning,
radioactive waste management, and site remediation
represents some of the most technically demanding,
hazardous, and stringently regulated domains within
the energy sector (IAEA, 1992). Traditional
operational approaches frequently fall short in
delivering the scalability, efficiency, and
transparency required to address contemporary safety
and sustainability objectives, particularly in the
context of aging infrastructure and increasing
regulatory oversight (Bogue, 2011). In response,
industry stakeholders are progressively embracing
digital transformation strategies, including the
a
https://orcid.org/0000-0001-7217-4040
b
https://orcid.org/0000-0003-1644-6480
c
https://orcid.org/0009-0000-8992-5031
d
https://orcid.org/0000-0002-6737-2031
e
https://orcid.org/0000-0001-5438-7552
deployment of robotics, artificial intelligence (AI),
and digital twin (DT) technologies (Smith et al.,
2020; Benkrid et al., 2025).
These advanced tools are reshaping the landscape
of monitoring, maintenance, and dismantling
activities in nuclear facilities. Robotic systems
facilitate remote interventions in high-radiation or
structurally compromised environments (Michel et
al., 2025), AI-driven analytics support predictive
maintenance and complex decision-making (Arhouni
et al., 2025; Selvam et al., 2025), while DT and
Building Information Modelling (BIM) enable
advanced scenario simulation, regulatory
compliance, and enhanced stakeholder engagement
(Virando et al., 2024; Oti et al., 2022). Despite their
potential, the integration of these technologies
526
Benkrid, A., Zahra, O., Szõke, R., Shukla, A. and Szõke, I.
Digital Transformation of the Nuclear Industry: Leveraging Robotics, AI, and Digital Twins for Standardised, Safe, and Efficient Operations.
DOI: 10.5220/0013820700003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 526-535
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

remains hampered by persistent technical,
organisational, and regulatory challenges, including
the “nuclearization” of commercial solutions,
cybersecurity vulnerabilities, interoperability
limitations, and fragmented certification pathways
(Skilton et al., 2023; Wong et al., 2024).
This paper critically examines the implementation
and integration of robotics, AI, and digital solutions
in the nuclear back-end. Leveraging the TECOP and
Five Case Models, it analyses their strategic value,
maturity levels, and principal barriers to adoption.
Drawing on insights from recent EU-funded
initiatives, such as HARPERS, DORADO, and XS-
Ability, the study offers evidence-based
recommendations to support policymakers and
industry stakeholders in advancing safe,
standardized, and future-proof digital innovation.
2 ROBOTIC TECHNOLOGIES IN
THE NUCLEAR BACK-END
This section examines the role of robotics in the
nuclear back-end, focusing on their operational value
in hazardous and restricted-access environments.
Applying the TECOP framework, it analyses both the
strategic benefits and the persistent integration
challenges facing robotic technologies in
decommissioning and waste management.
Key barriers include the absence of harmonised
certification schemes, insufficient testing
infrastructure, and uncertainty surrounding first-of-a-
kind (FOAK) systems. Robotics are particularly
relevant for “5D” tasks Dirty, Dangerous, Difficult,
Dull, and Dear, where they enhance safety and
efficiency. However, broader deployment is
constrained by infrastructural gaps, organisational
risk aversion, fragmented knowledge sharing, and
complex regulatory pathways. These factors continue
to shape the pace and scale of robotics adoption
across the sector.
2.1 Strategic Importance and
Advancing Robotic Capabilities
Over recent decades, robotic systems have progressed
from basic manipulators to advanced robotic systems
have evolved from basic manipulators to advanced
platforms capable of executing complex tasks in
hazardous nuclear back-end environments (Bogue,
2011; Szőke et al., 2023). In decommissioning
scenarios marked by intense radiation and limited
access, robotics improve safety by reducing worker
exposure (IAEA, 1992) and enhance operational
efficiency through remote inspection, sampling, and
dismantling (Kazemi et al., 2025; Shin et al., 2018).
Recent advances in AI, computer vision, and
sensor technologies enable semi-autonomous
navigation and perception. Mobile robots can now
map radiation zones and adapt in real time,
minimising human intervention and operational
delays (Benkrid et al., 2025; Fauquet-Alekhine &
Bleuze., 2023).
(
a
)
(
b
)
(
c
)
(
d
)
Figure 1: Representative Mobile Rovers and Manipulator
Arms Demonstrating Remote Robotic Operations in
Nuclear Decommissioning; Manipulator arms (a, b) and
mobile rovers (c, d) developed by Toshiba (a, d) and CEA
France (b, c) for nuclear remote operations.
2.2 Applications in 5D Environments
The adoption of robotic systems in nuclear operations
is fundamentally motivated by the so-called “5D”
criteria: Dirty, Dangerous, Difficult, Dull, and Dear.
These categories correspond to conditions where
direct human intervention is impractical, unsafe, or
economically prohibitive (IAEA, 1992). In the
nuclear back-end, such as decommissioning, waste
management, and contaminated facility inspection,
robotics have become indispensable. Routine
applications now include inspection, environmental
sampling, precision cutting, decontamination, and
waste segregation (Bogue, 2011).
These demands have led to diverse robotic
solutions, from standard ROVs for underwater
inspections to custom manipulators for hazardous hot
cells, such as those developed for Fukushima or by
CEA France (see Figure 1). Deploying such systems
requires multidisciplinary expertise and strict
adherence to nuclear qualification standards.
Digital Transformation of the Nuclear Industry: Leveraging Robotics, AI, and Digital Twins for Standardised, Safe, and Efficient Operations
527

Nevertheless, major technical and regulatory
hurdles remain, particularly around radiation
tolerance, remote operability, and system reliability
in complex nuclear environments.
2.3 Deployment Gaps and
Nuclearisation Challenges
While robotics are mature in aerospace and
manufacturing (Szőke et al., 2023; Smith et al., 2023),
their deployment in nuclear contexts is hindered by
the need for radiation-hardening and compliance with
strict safety standards (Bogue, 2011; IAEA, 1992).
Many components degrade under radiation and
require redesign, lowering their Technology
Readiness Level (TRL) when adapted for nuclear use
(Tugal et al., 2023; Swaminathan et al., 2025).
Additionally, nuclear sites pose complex
communication and control challenges (Fauquet-
Alekhine & Bleuze, 2023). The absence of
standardised procedures and diverse site conditions
further limit technology transfer and industrial uptake
(Benkrid et al., 2025; Michel & Amoyal, 2025).
2.4 Infrastructure for TRL
Advancement
Advancing robotic technologies from early concept to
operational deployment in the nuclear sector requires
dedicated infrastructures and systematic evaluation
frameworks (Michel & Amoyal., 2025). The NASA
Technology Readiness Level (TRL) scale
(Swaminathan et al., 2025) is commonly used to
assess maturity:
• TRLs 1–3: early research and proof of
concept,
• TRLs 4–6: validation in lab or relevant
environments,
• TRLs 7–8: prototype demonstration and
integration,
• TRL 9: proven systems in operational
conditions.
Notably, even mature technologies (TRL 8–9)
from other fields often require requalification and are
assigned lower TRLs for nuclear applications due to
strict safety and radiation requirements, a process
called “nuclearization” (Tugal et al., 2023).
Facilities like the UK National Nuclear User
Facility for Hot Robotics (NNUF-HR) enable
realistic testing, validation, and demonstration of
systems, facilitating technology advancement and
lowering barriers for SMEs (Bogue, 2011).
Surveys by groups such as the Expert Group on
Robotics in the Nuclear Back-end (EGRRS) (NEA-
EGRRS) indicate that challenges persist across
design, development, and integration phases,
particularly adapting to legacy infrastructure and
meeting certification standards.
Expanding dedicated testing infrastructures
across Europe is vital to accelerate technology
maturation and support widespread deployment
(Szőke et al., 2023).
2.5 Barriers Identified by Expert
Surveys
Recent expert surveys (Benkrid et al. 2025; Michel &
Amoyal, 2025; Szőke et al., 2023) have highlighted
that, despite improvements in technical
infrastructures and validation frameworks,
organizational and regulatory barriers persistently
impede the uptake of robotics in the nuclear sector.
The main challenges identified include:
• Risk aversion and reluctance to adopt
first-of-a-kind systems, often due to the
sector’s strong safety culture and strict
regulatory scrutiny.
• Limited cross-sector communication and
knowledge sharing, which restricts
awareness of available solutions and best
practices.
• Unclear or fragmented regulatory
requirements, making it difficult for
developers to navigate certification and
approval processes.
• Lack of sustained funding and
institutional support, especially for low-
and mid-TRL systems that require additional
demonstrations before deployment.
• Insufficient training and
expertise bridging robotics and nuclear
safety domains.
These non-technical barriers result in prolonged
pilot phases, slow market entry for emerging
solutions, and underutilization of available robotic
technologies.
Addressing these issues will require harmonized
regulatory approaches, dedicated funding and
demonstration programs, and stronger collaboration
between operators, industry, regulators, and research
organizations.
2.6 Regulatory and Organisational
Bottlenecks
Despite advances in robotics for the nuclear sector,
adoption remains limited by regulatory and
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
528

organisational challenges (Michel & Amoyal, 2025;
Swaminathan et al., 2025). Complex and fragmented
certification processes, coupled with inconsistent
regulatory frameworks, create significant hurdles for
developers, especially those new to nuclear
requirements (IAEA, 1992; Szőke et al., 2023).
Institutional risk aversion, rooted in the sector’s
strong safety culture, often leads to reluctance in
deploying novel or highly autonomous systems
without extensive validation, resulting in prolonged
pilot phases and slow operational uptake.
The integration of AI further complicates
certification due to issues around explainability, fail-
safes, and cybersecurity, which are not yet fully
addressed by existing regulations (Tugal et al., 2023).
Harmonisation of standards and regulatory processes
across Europe remains limited, increasing
development costs and barriers for SMEs.
Overcoming these bottlenecks requires regulatory
innovation, greater cross-sector collaboration, and
cultural shifts within organisations to embrace digital
and autonomous technologies. Initiatives such as the
European Expert Group on Robotics and projects like
CLEANDEM (Michel, M., et al. 2023) highlight the
need for coordinated efforts to facilitate robotics
deployment in the nuclear industry.
3 DIGITAL TECHNOLOGIES IN
NUCLEAR BACK END
Digital technologies such as Digital Twins (DT) and
Building Information Modelling (BIM) are
increasingly seen as strategic enablers for nuclear
back-end operations, particularly in
decommissioning and waste management (Szőke et
al., 2023). These tools support improved planning,
safety, and regulatory compliance through advanced
virtualisation and real-time data integration (Amin et
al., 2021).
This section applies the TECOP framework to
evaluate the deployment status of DT and BIM across
technical, economic, commercial, organisational, and
political dimensions. It outlines their core benefits,
identifies key barriers to adoption, presents
stakeholder insights, and concludes with targeted
recommendations to accelerate implementation and
digital innovation across the sector.
3.1 Strategic and Operational Benefits
DT and BIM technologies offer key advantages for
nuclear decommissioning and waste management. By
simulating dismantling scenarios, they enable
advanced planning, workflow optimisation, and early
anomaly detection, reducing safety risks and
enhancing decision-making. These tools also support
accurate waste estimation, material tracking, and
resource allocation throughout the decommissioning
lifecycle.
DT and BIM further improve remote and robotic
operations to limit human exposure in hazardous
zones (Szőke et al., 2023). Real-time data integration
enables condition monitoring and predictive safety
management, while simulations enhance emergency
preparedness (Amin et al., 2021).
From a regulatory standpoint, they streamline
compliance by facilitating data reporting and
supporting phased technology integration. DT/BIM
platforms also strengthen knowledge management,
training, and external communication by visualising
complex operations.
3.2 Barriers to Adoption and Emerging
Risks
Despite their advantages, DT and BIM face
cybersecurity vulnerabilities, sensor and data
limitations, and integration difficulties with legacy
systems. Many organisations lack adequate
infrastructure for secure data handling, and legacy
records remain largely non-digitised.
Financial uncertainty and organisational
resistance also constrain adoption, driven in part by
rapid technological change and insufficient
regulatory alignment. Without clear ROI and
consistent certification, decision-makers remain
hesitant to invest.
3.3 Stakeholder Insights and Priorities
According to the survey conducted in the context of
this analysis, stakeholders identified dismantling
scenario simulation as the highest-priority application
of DT and BIM. This was followed by their use in
regulatory review, project scheduling, site
monitoring, and strategy development. There was
also strong consensus around the usefulness of
DT/BIM for environmental risk modelling and waste
minimisation (Szőke et al., 2023).
However, these priorities are tempered by
persistent concerns around cybersecurity, lack of
interoperability, limited availability of commercial
off-the-shelf solutions, and insufficient regulatory
clarity (Szőke et al., 2023). These challenges were
echoed across responses from both internal and
external stakeholders .
Digital Transformation of the Nuclear Industry: Leveraging Robotics, AI, and Digital Twins for Standardised, Safe, and Efficient Operations
529
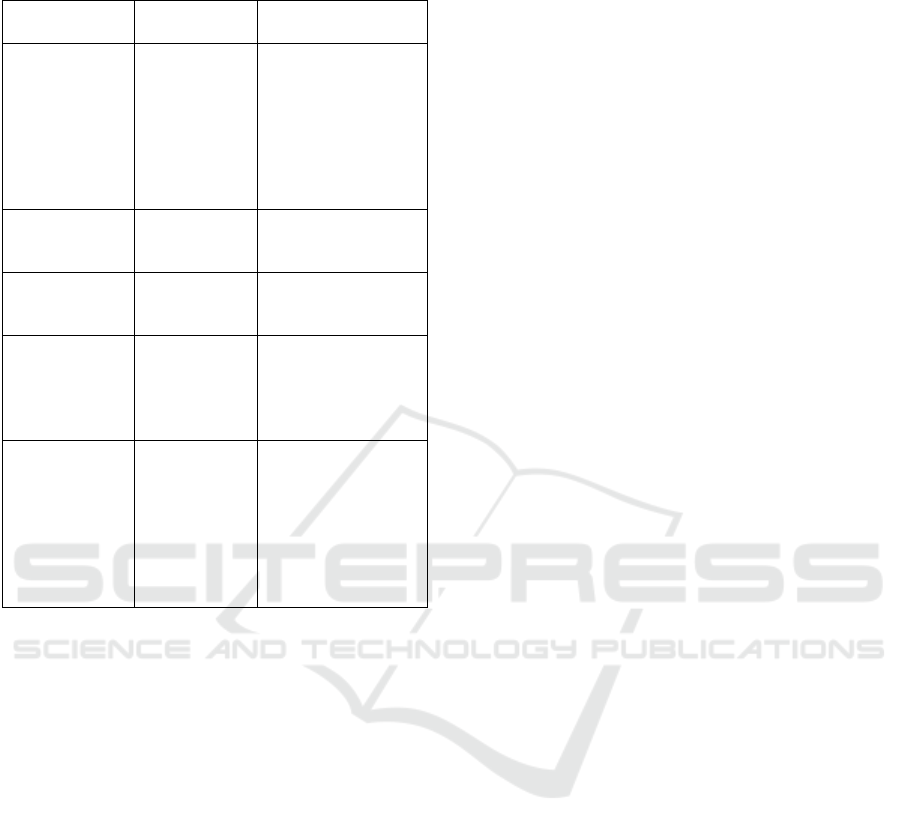
Table 1: Mapping of identified enablers and blockers for
DT/BIM implementation across TECOP dimensions.
TECOP
Dimension
Enablers /
O
pp
ortunities
Blockers /
Challen
g
es
Technical
Scenario
simulation,
safety
monitoring,
real-time data
integration,
robotics
support
Sensor limitations,
Legacy data, Low
interoperability,
Cybersecurity
vulnerabilities
Economical
Lifecycle cost
reduction
High initial
investment, Lack of
ROI evidence
Commercial
Technology-
provider
collaboration
Limited COTS
solutions, Unclear
b
usiness models
Organisational
Training and
knowledge
management,
Change
leadershi
p
Skills gaps,
Organisational
resistance
Socio-Political
Improved
transparency,
public
engagement,
Modern
image for
young
p
rofessionals
Public trust deficit,
Regulatory
misalignment, Lack
of global standards
Table 1 summarises the key enablers and barriers
to DT and BIM adoption in nuclear decommissioning
using the TECOP framework. It highlights the most
frequently cited opportunities, such as scenario
simulation, enhanced safety monitoring, and
improved public engagement, as well as major
challenges including cybersecurity risks, high initial
costs, limited interoperability, and regulatory
misalignment. This structured overview supports the
targeted recommendations provided in the following
section by clarifying the interplay between
technological promise and real-world constraints.
3.4 Recommendations for Effective
Implementation
To unlock the full potential of DT and BIM
technologies in nuclear decommissioning, several
measures are recommended: (i) Invest in enabling
infrastructure: Develop site-specific sensor systems
and secure data platforms tailored to the nuclear
context. (ii) Launch targeted pilot projects: Focus
on use cases with high strategic relevance, such as
dismantling scenario analysis and operator training to
generate early value and build internal support.
(iii) Develop integration standards: Promote
interoperability through shared data formats,
cybersecurity protocols, and implementation
frameworks. (iv) Promote cross-sector
collaboration: Strengthen ties between nuclear
stakeholders, technology providers, and regulatory
agencies to accelerate knowledge exchange and
regulatory harmonisation. (v) Build workforce
capacity: Offer continuous training and establish
change management strategies to reduce resistance
and foster digital culture.
4 REGULATORY CHALLENGES
AND STRATEGIES FOR
ENABLING INNOVATION
The integration of advanced technologies such as
autonomous robotics and artificial intelligence (AI)
into nuclear decommissioning and waste
management introduces not only technical but also
profound regulatory challenges. Unlike incremental
innovations, these emerging technologies often do not
align with existing regulatory assumptions or
categories (Szőke et al., 2023; Skilton et al., 2023).
Their disruptive nature, combined with the high-risk
profile of nuclear operations, demands regulatory
frameworks that are adaptable, harmonized, and
forward-looking.
4.1 Disruption of Established
Regulatory Paradigms
The nuclear sector is governed by conservative
regulatory regimes prioritising deterministic models
and validated practices (Szőke et al., 2023). Emerging
technologies especially AI and autonomous robotics,
often fall outside existing validation frameworks,
leading to uncertainty and delayed deployment.
Projects like SHARE and HARPERS call for
adaptive, risk-informed regulations to match the pace
of innovation while maintaining public trust (Michel
et al., 2023).
4.2 Fragmentation and Lack of
Harmonized Standards
One of the most significant barriers to adoption lies
in the absence of internationally harmonized
standards for the certification and deployment of
robotics and AI technologies in sensitive sectors
(Benkrid et al., 2025; Szőke et al., 2023). Regulatory
requirements vary considerably across jurisdictions,
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
530

leading to fragmented certification pathways and
increased complexity for multinational projects
(Michel & Amoyal, 2025; Tugal et al., 2023).
Technologies may require redundant testing and
approval in each country, resulting in higher costs,
procedural delays, and ultimately deterring
investment and cross-border collaboration.
Moreover, this regulatory fragmentation hinders
interoperability and slows down the development of
common safety protocols. For developers and
operators, navigating this patchwork of national
requirements imposes a substantial administrative
and financial burden that inhibits innovation.
4.3 Knowledge Gaps and Regulatory
Grey Zones
Many tech developers lack familiarity with nuclear
regulatory frameworks, leading to under- or over-
designed solutions and unpredictable review
processes (Smith et al., 2020; Szőke et al., 2023).
FOAK systems face long approval timelines due to
the absence of established categories and evaluation
criteria (Michel & Amoyal, 2025).
Clarifying certification requirements and building
cross-sector expertise are essential to de-risk
innovation and reduce development costs.
4.4 Validation and Emerging Solutions
Validation of robotics and AI systems intended for
hazardous environments is a complex, yet essential,
step toward acceptance (Smith et al., 2020). Unlike
conventional industrial tools, these systems must
demonstrate robustness, reliability, and safety across
a wide range of operational scenarios, including
exposure to high radiation, limited accessibility, or
degraded sensing environments. Current validation
protocols, however, often fall short of addressing
these extreme-use conditions (IAEA, 1992).
In response, innovative regulatory tools such as
regulatory sandboxes are gaining attention (Michel
& Amoyal, 2025). These controlled environments
allow early collaboration between technology
developers and regulators, enabling real-world testing
of novel systems under limited scope and risk. By
facilitating iterative feedback, sandboxes help refine
both technology design and regulatory expectations
(Smith et al., 2020). They offer a pragmatic path
toward the development of realistic, risk-informed
standards that can accelerate the safe deployment of
advanced technologies.
4.5 Continuous Validation, Post-
Market Surveillance, and Trust
Building
Beyond initial certification, the long-term safety and
reliability of deployed robotic and AI systems must
be ensured through continuous validation and post-
market surveillance mechanisms (Szőke et al.,
2023). These mechanisms are critical in a high-risk
sector such as nuclear decommissioning, where even
minor system failures can have severe consequences.
Real-time performance monitoring, incident
reporting, and software updates must be integrated
into regulatory expectations, allowing technologies to
evolve while remaining within a validated operational
envelope (IAEA, 1992).
These feedback loops not only enhance safety but
also contribute to building regulatory trust. When
regulators, operators, and technology providers share
data and lessons learned from real-world use, future
assessments become faster and more robust.
Importantly, such processes help address the
limitations of initial FOAK (first-of-a-kind)
validations, enabling dynamic improvement of both
technologies and regulatory practices over time.
4.6 Capacity Building and
Collaborative Governance
The complexity and novelty of digital and
autonomous technologies require regulatory bodies
themselves to evolve (IAEA, 1992). Traditional
expertise may no longer suffice to assess the nuanced
behaviour of AI systems, the cybersecurity
vulnerabilities of connected platforms, or the
functional resilience of autonomous robots in
radioactive environments. As such, capacity
building within regulatory authorities is essential.
Dedicated training programmes, collaborative
working groups, and participation in international
standardisation efforts are all necessary to enhance
regulators' ability to keep pace with innovation.
Initiatives such as the OECD Working Group on new
technologies demonstrate the value of cross-border
dialogue and harmonised policy development.
Collaboration across sectors between nuclear
operators, research institutions, digital technology
providers, and regulators is another key enabler.
Shared pilot projects, co-developed testing protocols,
and transparent communication channels support
mutual understanding and accelerate the co-creation
of practical, innovation-friendly regulatory
frameworks.
Digital Transformation of the Nuclear Industry: Leveraging Robotics, AI, and Digital Twins for Standardised, Safe, and Efficient Operations
531

4.7 Clarifying Regulatory
Requirements vs.
Misinterpretations
In many cases, the perceived rigidity of regulatory
frameworks stems not from actual legal constraints,
but from misinterpretation of requirements (Smith
et al., 2020). Differentiating clearly between what is
truly mandated by regulation, what is a technical
necessity, and what is an organisational habit is
critical. This clarity can prevent overengineering,
reduce unnecessary costs, and avoid project delays
caused by conservative overcompliance.
Efforts should therefore include guidance
documents, case studies, and knowledge exchange
platforms to clarify how existing regulations apply
to new technologies (2021 Szőke et al., 2023). These
tools will help both developers and operators focus
their efforts on genuine compliance priorities and
avoid wasting resources on irrelevant or
misunderstood constraints.
5 VALUE PROPOSITION OF
ADVANCED TECHNOLOGIES
The integration of advanced technologies AI,
robotics, and digitalisation is increasingly shaping
nuclear back-end activities such as decommissioning,
waste management, and site remediation (IAEA,
1992). These tools offer the potential to enhance
safety, improve efficiency, and reduce long-term
costs (Wong et al., 2024). Digital twins, autonomous
systems, and analytics support smarter decision-
making and risk mitigation.
However, adoption requires more than a cost-
saving argument. A robust business case must address
strategic alignment, operational feasibility, and long-
term sustainability (Swaminathan et al., 2025). The
Five Case Model provides a structured framework
across five dimensions:
Strategic alignment, particularly with goals
such as enhanced safety and modernization.
Economic value, emphasizing public
benefits and cost-effectiveness.
Commercial viability, ensuring market
readiness and industrial uptake.
Financial assessment, balancing initial
investment against expected returns.
Managerial readiness, focusing on
regulatory compliance, project governance,
and workforce capacity.
Despite growing interest, deployment remains
constrained by fragmented regulation, limited
standardisation, and integration gaps (Wong et al.,
2024). The HARPERS project proposes a structured
methodology combining the Five Case Model with
the TECOP framework to assess not only financial
outcomes but also technical feasibility, regulatory
alignment, and socio-political impact.
5.1 The Need for Change
Current decommissioning and waste handling
practices rely heavily on outdated, manual methods
that are not only cost-intensive but also pose health
and environmental risks. Inconsistent technology
qualification processes, especially across
jurisdictions, result in delayed innovation uptake and
inefficiencies in waste processing. Robotics and
automation remain underutilized, with challenges in
reliability, cost justification, and regulatory
acceptance hindering wider deployment (Michel &
Amoyal, 2025).
Similarly, digital twin and BIM technologies,
despite their planning and simulation benefits-face
barriers such as poor interoperability, cybersecurity
concerns, and lack of certification standards.
These systemic limitations underscore the urgent
need for harmonization and international cooperation
to standardize practices, accelerate innovation
adoption, and improve operational outcomes.
5.2 Building the Economic Case
The HARPERS framework guides the development
of a robust economic case through four key steps:
identifying evaluation criteria (TECOP attributes),
analysing impacts and risks, comparing change
scenarios, and making informed go/no-go decisions
(Szőke et al., 2023). The evaluation spans safety
improvements, cost reductions, time efficiencies, and
sustainability considerations.
Each technological area, waste management,
robotics, and digital twins, has been assessed via
high-level TECOP analyses. These reveal that:
• Technical: Standardization enhances
reliability and scalability but requires robust
integration with legacy systems and
advanced safety features (IAEA, 1992).
• Economic: While upfront costs can be high,
lifecycle savings from improved efficiency
and reduced waste volumes justify
investment (Michel & Amoyal, 2025).
• Commercial: Unified standards can
stimulate market growth and reduce
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
532
investment risks through predictable
qualification pathways (Wong et al., 2024).
• Organizational: Success depends on
workforce training, internal acceptance, and
change management strategies (Oti et al.,
2022).
• Socio-Political: Public trust and regulatory
alignment are critical; these can be improved
through stakeholder engagement and
transparency (Kolditz et al., 2023).
5.3 Insights from Practical
Applications
The framework was applied to real-world use cases
(e.g., Centraco Melting Unit, Studsvik inDRUM,
NNL’s EASD, Magnox DT, and Fukushima
robotics). Across all, benefits such as enhanced
worker safety, cost savings, and improved timelines
were observed (Michel & Amoyal, 2025). However,
challenges persist around capital costs, workforce
resistance, and regulatory complexity.
Interactive discussions at DigiDECOM 2024
further highlighted the need to adopt a broader view
of return on investment (ROI), considering not only
direct cost savings but also long-term strategic gains
such as risk reduction, regulatory resilience, and skill
development (Szőke et al., 2023).
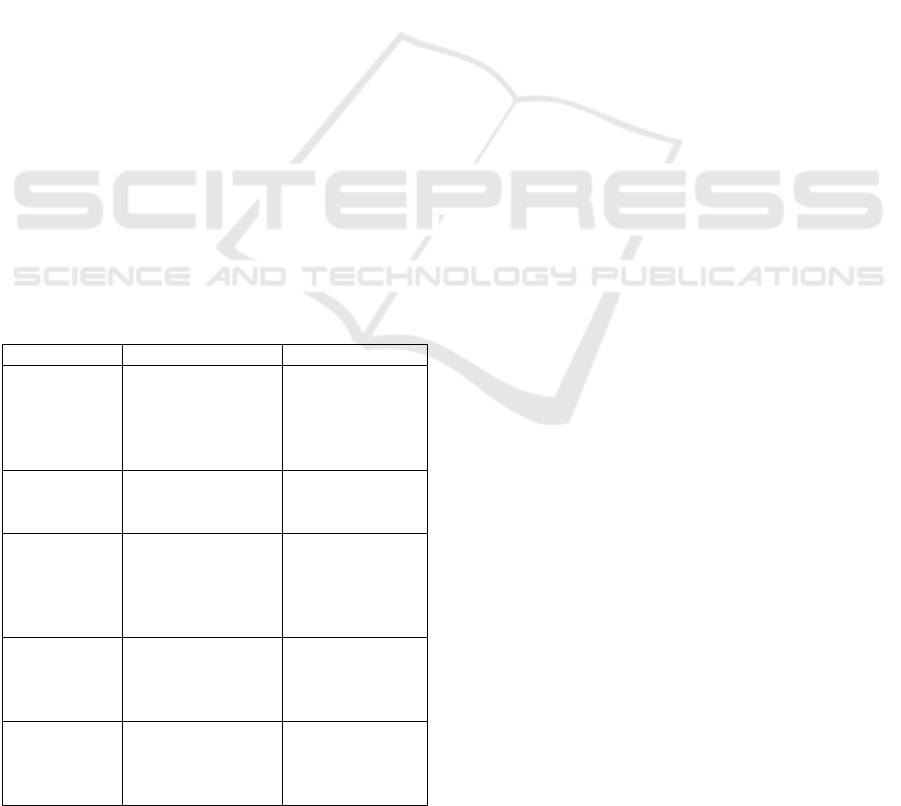
Table 2: Summary of key challenges and levers identified
in the HARPERS project for successful adoption of
robotics, digital tools, and advanced decontamination
technologies in the nuclear back-end.
Dimensions Barriers Enablers
Technical
Fragmented
qualification
protocols,
interoperability
g
a
p
s
Standardized
frameworks,
digital
integration
Economic
High upfront costs,
uncertain ROI
Lifecycle
savings, pooled
R&D fundin
g
Commercial
Market hesitation,
lack of certified
products
Cross-sector
partnerships,
shared
procurement
mechanisms
Organizational
Workforce
resistance, limited
skills
Training
programs,
leadership
en
g
a
g
ement
Socio-
Political
Regulatory
fragmentation,
public scepticism
International
harmonization,
early stakeholder
involvement
5.4 Recommendation for Policy
Markers
The findings present a compelling case for policy-led
harmonization in three critical domains:
• Waste treatment and decontamination
technologies
• Robotics and automation in dismantling and
waste operations
• Digital twin and advanced BIM integration
Policymakers are urged to lead the establishment
of international standards, develop collaborative
regulatory testing environments, and promote data
interoperability (IAEA, 1992). Addressing societal
concerns, such as job displacement or data privacy
requires transparency, community engagement, and
inclusive governance mechanisms.
By adopting a standardized and collaborative
approach, the nuclear sector can overcome systemic
barriers and unlock the full value of advanced
technologies, ensuring a safer, more efficient, and
sustainable future for nuclear back-end operations.
6 SAFETY AND SECURITY IN
DIGITAL NUCLEAR
OPERATIONS
Digital transformation, driven by the integration of
robotics, artificial intelligence (AI), and digital twins
(DT), presents major opportunities to strengthen
safety and security in the nuclear operation while
enhancing operational efficiency (Smith et al., 2020;
Virando et al., 2024). Safety requirements in this
domain are exceptionally stringent, not only due to
radiological hazards but also the persistent threats of
malicious attacks and cyber intrusions.
Robotics significantly reduces operator exposure
by performing hazardous tasks such as inspection,
maintenance, and decontamination, thereby
contributing substantially to on-site physical safety
(Smith et al., 2020; Wong et al., 2024). Autonomous
robots further bolster physical protection through
surveillance and intrusion detection.
AI plays a critical role in nuclear back-end safety,
enabling predictive maintenance by identifying
failures early through sensor data analysis, and
enhancing cybersecurity via anomaly detection and
the protection of information networks (IAEA, 1992).
Digital twins are essential for real-time
monitoring and risk assessment. They facilitate the
simulation of incidents, cyber-physical attacks, and
Digital Transformation of the Nuclear Industry: Leveraging Robotics, AI, and Digital Twins for Standardised, Safe, and Efficient Operations
533

technical failures, supporting the continual testing
and refinement of safety and security protocols
(Virando et al., 2024; Eckhart & Ekelhart, 2019).
However, the adoption of these technologies also
introduces new risks, such as cybersecurity
vulnerabilities, software/ hardware failures, and
human–machine interface challenges. Robotic
systems must therefore be designed with redundancy,
fail-safe mechanisms, and subjected to rigorous
validation protocols (Smith et al., 2020; Wong et al.,
2024). Robust cybersecurity measures are vital for
both AI and networked robotics, including
encryption, access controls, behavioral monitoring,
and compliance with relevant standards (Wen et al.,
2025).
For digital twins, the reliability and accuracy of
models and data are critical; any compromise may
result in improper responses to incidents.
Consequently, these systems require continuous
updates, real-world validation, and architectures that
are resilient to intrusions (Holmes et al., 2021).
Ultimately, the success of this transformation also
depends on human expertise, continuous operator
training, compliance with regulatory frameworks
(such as ISO 27001, ISO 42001, GDPR, and the EU
AI Act), and a proactive approach to emerging safety
and cybersecurity challenges throughout the lifecycle
of digital solutions (Wen et al., 2025; Holmes et al.,
2021).
7 EU-FUNDED SOLUTIONS:
DORADO AND XS-ABILITY
Two EU-funded projects, XS-Ability and DORADO,
are addressing major technical and organisational
barriers that hinder the deployment of robotics and
digital solutions in nuclear decommissioning.
The XS-Ability project (Michel & Amoyal,
2025), funded by EURATOM, focuses on the
development of modular, autonomous robotic
systems for in-situ characterisation in hard-to-access,
highly radioactive nuclear environments. XS-Ability
platforms are designed to operate with minimal
human intervention in environments that present
radiological, spatial, and logistical constraints. The
robotic systems incorporate radiation-tolerant sensors
(e.g., gamma spectrometers, LiDAR, structured light
scanners), onboard AI for data fusion and
autonomous decision-making, and wireless
communication for remote supervision. The project
also emphasises modular payload architecture to
allow rapid adaptation to mission-specific needs.
Technical validation is carried out through lab-based
mock-ups and real-world testing campaigns in
partnership with end users (e.g., EDF, CEA). XS-
Ability directly targets Technology Readiness Level
(TRL) progression by embedding safety and
nuclearization requirements from the design phase
onward.
The DORADO project (Benkrid et al. 2025)
focuses on enabling the integration of digital tools,
especially digital twins, into robotic
decommissioning workflows through semantic
interoperability and regulatory traceability. At its
core, DORADO is developing a digital framework
based on ontologies to formally structure knowledge
across tools, actors, and assets involved in
dismantling operations. This includes: (i) BIM-based
mission control; (ii) linkage between digital twins and
robotic mission planning systems; and (iii)
standardised data models for knowledge transfer
across decommissioning stages. The framework is
designed to support explainable AI for safety-critical
decisions and provide visual dashboards that enhance
operator understanding and oversight.
8 CONCLUSIONS
Digital transformation is fundamentally reshaping the
nuclear back-end, offering unprecedented
opportunities to enhance safety, operational
efficiency, and regulatory compliance through the
integration of robotics, artificial intelligence (AI), and
digital twin (DT) technologies. This paper has
examined the strategic relevance of these innovations
within the decommissioning and waste management
domains, using the TECOP and Five Case Models to
provide a structured analysis of their benefits and
barriers.
While robotics extend operational reach in
hazardous 5D environments, and DT/BIM systems
improve simulation, training, and regulatory
traceability, their deployment remains constrained by
nuclearization requirements, fragmented certification
processes, cybersecurity risks, and institutional
inertia. These challenges must be systematically
addressed to ensure scalable and sustainable
adoption.
EU-funded initiatives such as XS-Ability and
DORADO demonstrate the critical role of
coordinated research in bridging the gap between
technological development, field deployment, and
regulatory integration. By targeting TRL
advancement, semantic interoperability, and safety-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
534

oriented design, these projects provide blueprints for
future digital innovation in the nuclear sector.
Looking ahead, the successful digital
transformation of the nuclear back-end will depend
on sustained cross-sector collaboration, adaptive
regulatory frameworks, and investments in digital
infrastructure. Such efforts are essential to ensure the
long-term safety, efficiency, and resilience of nuclear
operations across Europe and beyond.
REFERENCES
Arhouni, F. E., Abdo, M. A. S., Ouakkas, S., Bouhssa, M.
L., & Boukhair, A. (2025). Artificial intelligence-
driven advances in nuclear technology: Exploring
innovations, applications, and future prospects. Annals
of Nuclear Energy, 213, 111151.
Benkrid, A., Zahra, O., & Szőke, I. (2025). Digital Twin-
Enabled Multi-Robot Systems for Safe and Efficient
Nuclear Decommissioning.
Bogue, R. (2011). Robots in the nuclear industry: a review
of technologies and applications. Industrial Robot: An
International Journal, 38(2), 113-118.
Eckhart, M., & Ekelhart, A. (2019). Digital twins for cyber-
physical systems security: State of the art and outlook.
Security and Quality in Cyber-Physical Systems
Engineering: With Forewords by Robert M. Lee and
Tom Gilb, 383-412.
Fauquet-Alekhine, P., & Bleuze, J. (2023, July). Robot-
Assisted Nuclear Disaster Response: determinants of
performance. In 2023 3rd International Conference on
Electrical, Computer, Communications and
Mechatronics Engineering (ICECCME) (pp. 1-12).
IEEE.
Holmes, D., Papathanasaki, M., Maglaras, L., Ferrag, M.
A., Nepal, S., & Janicke, H. (2021, September). Digital
twins and cyber security–solution or challenge?. In
2021 6th South-East Europe Design Automation,
Computer Engineering, Computer Networks and Social
Media Conference (SEEDA-CECNSM) (pp. 1-8).
IEEE.
Nuclear Energy Agency (NEA) - Expert Group on the
Application of Robotics and Remote Systems in the
Nuclear Back-end (EGRRS)
International Atomic Energy Agency, Safety Aspects of
Nuclear Power Plant Automation and Robotics, IAEA-
TECDOC-672, IAEA, Vienna (1992)
Kazemi, S. (2025). Robotic Automation for Nuclear
Decommissioning: Development of a Tool Carrier
System with Milling and Clearance Measurement
Capabilities. Sensors & Transducers, 268(1), 28-36.
Kolditz, O., Jacques, D., Claret, F., Bertrand, J., Churakov,
S. V., Debayle, C., ... & Wendling, J. (2023).
Digitalisation for nuclear waste management:
predisposal and disposal. Environmental Earth
Sciences, 82(1), 42.
Kundavaram, R. R., Onteddu, A. R., Devarapu, K., &
Nizamuddin, M. (2025). Advances in autonomous
robotics for environmental cleanup and hazardous
waste management. Asia Pacific Journal of Energy and
Environment, 12(1), 1-16.
Michel, M., & Amoyal, G. (2025). From robots to drones,
the future of decommissioning operations–The
CLEANDEM and XS-ABILITY projects. EPJ Nuclear
Sciences & Technologies, 11, 15.
Michel, M., Amoyal, G., & Schoepff, V. (2023).
CLEANDEM, a cyber physical equipment for
unmanned nuclear decommissioning measurements. In
EPJ Web of Conferences (Vol. 288, p. 07004). EDP
Sciences.
Oti, A. H., Farrell, P., Abanda, F. H., McMahon, P.,
Mahamadu, A. M., Mzyece, D., ... & Prinja, N. (2022).
A BIM-driven framework for integrating rules and
regulations in the decommissioning of nuclear power
plants. Construction Innovation, 22(4), 809-830.
Selvam, D. C., Devarajan, Y., & Raja, T. (2025). Exploring
the potential of artificial intelligence in nuclear waste
management: Applications, challenges, and future
directions. Nuclear Engineering and Design, 431,
113719.
Smith, R., Cucco, E., & Fairbairn, C. (2020). Robotic
development for the nuclear environment: challenges
and strategy. Robotics, 9(4), 94.
Swaminathan, S., Wishart, J., Zhao, J., Russo, B., &
Rahimi, S. (2025). Adapting the Technology Readiness
Level (TRL) Framework to Automated Vehicle
Development (No. 2025-01-8671). SAE Technical
Paper.
Szőke, I., Hartmann, C., Szőke, R., Stephane, L., Zahra, O.,
& Benkrid, A. (2023, October). A holistic approach to
digitalisation and robotics in the nuclear back-end. In
International Conference on Radioactive Waste
Management and Environmental Remediation (Vol.
87530, p. V001T01A001). American Society of
Mechanical Engineers.
Tugal, H., Abe, F., Caliskanelli, I., Cryer, A., Hope, C.,
Kelly, R., ... & Skilton, R. (2023, June). The impact of
a haptic digital twin in the nuclear industry and
potential applications. In 2023 IEEE international
conference on advanced robotics and its social impacts
(ARSO) (pp. 134-139). IEEE.
Virando, G. E., Lee, B., Kee, S. H., & Yee, J. J. (2024).
Digital Twin Simulation and Implementation in Safety
Risk Management Process. IEEE Access.
Wen, S. F., Shukla, A., & Katt, B. (2025). Artificial
intelligence for system security assurance: A systematic
literature review. International Journal of Information
Security, 24(1), 43.
Wong, C., Chapman, H., Lawton, S., Szulik, M., Tuck, O.,
& Richardson, J. P. (2024). A Proposed Pathway to
Improve Reliability Claims for Robotic Systems in
Nuclear Decommissioning Safety Cases. ATW-
International Journal For Nuclear Power, 69(4), 38-44.
Digital Transformation of the Nuclear Industry: Leveraging Robotics, AI, and Digital Twins for Standardised, Safe, and Efficient Operations
535
