
Context-Aware Warning Systems: Leveraging Driving Environment
Data for Improved Driver and Road User Warnings
Alexander Stocker
a
, Tahir Emre Kalayci
b
, Michael Spitzer
c
and Gerald Musser
d
Virtual Vehicle Research GmbH, Inffeldgasse 21a, 8010 Graz, Austria
Keywords: Software-Defined Vehicles, Connected Vehicles, Driver Warning, Driver Monitoring, Data Sharing, Data
Ecosystems.
Abstract: Web technologies, Internet of Things (IoT) frameworks, and modern communication standards are
increasingly transforming the automotive sector, giving rise to software-defined vehicles. These vehicles
operate as connected entities within a broader digital ecosystem, enabling real-time data exchange with
infrastructure, cloud services, and other road users. This ongoing digitalization opens new opportunities to
improve road safety through intelligent, context-aware driver assistance systems. Our paper introduces a novel
context-aware driver warning system to be developed as part of the ROADGUARD project. The system will
fuse data from in-cabin driver monitoring with data about the external driving environment to enhance the
accuracy and contextual relevance of safety alerts. Conventional Driver Monitoring Systems (DMS) often
rely solely on gaze-based heuristics, which can lead to false positives when environmental context is not
considered. Our approach will overcome this limitation by integrating multimodal sensing, AI-driven edge
inference, secure data sharing, and adaptive, multi-target warning delivery. Our proposed system architecture
is structured around three interconnected subsystems—Sensing, Sharing, and Acting. It will not only enable
more precise, real-time alerts for drivers but also cooperative warnings for vulnerable road users such as
pedestrians and cyclists. By embedding situational awareness and supporting data-driven improvement via
mobility data spaces, our system supports the Vision Zero objective of eliminating traffic fatalities.
1 INTRODUCTION AND
MOTIVATION
Web technologies, Internet of Things (IoT)
frameworks, and modern communication standards
are increasingly permeating the automotive domain
(Sterk et al. 2023; Kaiser et al., 2021). This
technological convergence is transforming vehicles
into connected entities within a broader digital
ecosystem, enabling real-time data exchange with
cloud services, roadside infrastructure, and other
vehicles (Stocker et al., 2017). Simultaneously,
vehicles are evolving into software-defined platforms
(Liu et al. 2022), moving beyond traditional
hardware-centric architectures. This shift toward the
software-defined vehicle (Otto et al. 2025) offers
greater flexibility, supports over-the-air (OTA)
a
https://orcid.org/0000-0002-3758-1617
b
https://orcid.org/0000-0001-6228-1221
c
https://orcid.org/0000-0003-2173-9317
d
https://orcid.org/0009-0005-6006-588X
updates, and facilitates the integration of advanced
functionalities such as driving automation, context-
aware driver assistance, continuous system
optimization, and intelligent decision-making.
Moreover, vehicles are now enabled to leverage a
wide range of external data sources (Kaiser et al.
2017), such as real-time traffic information, weather
reports, and transportation infrastructure data, to
further enhance both safety and driver comfort. By
integrating these heterogeneous inputs, vehicles
become capable of making context-sensitive
decisions (Matalonga et al., 2025), anticipating
potential hazards, tailoring warnings to situational
risks, and delivering more accurate and timely
assistance to drivers (Ebinger et al., 2024).
From a digitalization standpoint, product
architectures are undergoing a fundamental
Stocker, A., Kalayci, T. E., Spitzer, M. and Musser, G.
Context-Aware Warning Systems: Leveraging Driving Environment Data for Improved Driver and Road User Warnings.
DOI: 10.5220/0013820600003985
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 21st International Conference on Web Information Systems and Technologies (WEBIST 2025), pages 573-581
ISBN: 978-989-758-772-6; ISSN: 2184-3252
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
573

transformation (Yoo et al., 2024). Traditional vehicle
development, which focused primarily on mechanical
systems and static design paradigms, is giving way to
flexible, modular, and software-centric architectures
and services (Otto et al. 2025). In this new paradigm,
digital innovation, service-oriented design, and
platform-based thinking are becoming central (Sterk
et al., 2024). As vehicles grow increasingly connected
and data-driven (Stocker et al., 2017), value creation
is shifting from physical products to digital
services—such as real-time diagnostics, predictive
maintenance, personalized driver assistance, and
subscription-based feature upgrades (Stocker et al.
2021). This evolution not only transforms how
vehicles are designed and maintained but also
redefines how users interact with and experience
mobility.
This digital transformation of the mobility
automotive sectors (Stocker et al., 2024; Piccini et al.
2015) holds significant potential to improve one of
the most critical aspects of mobility, driving and road
safety. By harnessing connected technologies, real-
time data, and intelligent systems, vehicles can for
instance better detect, predict, and respond to
hazardous situations—ultimately reducing the risk of
accidents and enhancing protection for both drivers
and vulnerable road users.
Inattentiveness and distraction remain among the
leading contributors to road accidents globally
(Regan et al. 2011). In response, and to move closer
to the European Union’s Vision Zero objective
(European Commission, 2022), aiming to eliminate
all traffic-related fatalities, modern vehicles are
increasingly equipped with driver assistance and
warning systems (Li et al. 2024) designed to detect
and mitigate risks in real-time. However, despite
these advancements, the persistent rate of road
fatalities—especially among pedestrians, cyclists,
and motorcyclists (Silla et al. ,2017)—highlights the
urgent need for more effective and intelligent safety
interventions. Consequently, Physical AI is
recognized as a pivotal enabler of digital innovation
(Stocker, 2025).
One key limitation of many current driver
assistance, warning systems and driver warning apps
(Trager et al. 2021) is their tendency to generate false
positives (Large et al. 2017), alerts triggered in non-
critical situations. These frequent, often unnecessary
warnings can lead to driver desensitization, reduced
trust in the system, and diminished overall safety
benefits (Navarro et al. 2016).
To increase the relevance and effectiveness of in-
vehicle driver warning systems, we propose the
integration of data and information from both the
external driving environment and in-cabin sources,
such as driver state and behaviour. By fusing
environmental context—such as road conditions,
traffic dynamics, and weather—with insights from
driver monitoring systems (e.g., gaze tracking,
drowsiness detection, and cognitive load estimation),
warning systems can become more adaptive, timely,
and personalized. Our multimodal fusion approach
has the potential to significantly reduce false
positives, increase contextual relevance, and improve
driver trust and responsiveness to safety-critical
alerts.
Based on the introduction and motivation, Section
2 presents our proposed context-aware warning
system for drivers and other road users, situated
within the current state of the art in driver warning
systems. This section provides a detailed overview of
the motivating scenario and the rationale behind our
solution concept. Section 3 outlines the solution
architecture and its technical foundation, organized
around the three core subsystems: Sensing, Sharing,
and Acting. Section 4 discusses our approach along
with key insights from technological considerations.
Finally, Section 5 concludes the paper with a
summary and an outlook on future research directions
and potential applications.
2 STATE OF THE ART
AND ADVANCEMENTS
2.1 Driver Monitoring and Warning
Systems
Current Driver Monitoring Systems (DMS) primarily
focus on observing the driver within the cabin
(Michelaraki et al., 2023), often neglecting the
broader external driving context. Moreover, existing
digital warning strategies are typically designed to
alert the driver alone, overlooking the potential
benefit of also communicating risks to nearby road
users—especially when the vehicle is operated by a
distracted or inattentive driver.
A key limitation of many current inattention and
distraction detection approaches is their susceptibility
to false positives (cf. Large et al., 2017). These
systems may flag off-road gaze behaviour as
distraction, even when such behaviour is contextually
appropriate, for instance, when a driver is monitoring
a child pedestrian near the roadway. Such
misclassifications not only reduce the relevance of
warnings but can also frustrate drivers, eroding trust
in the system. As a result, drivers may choose to
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
574
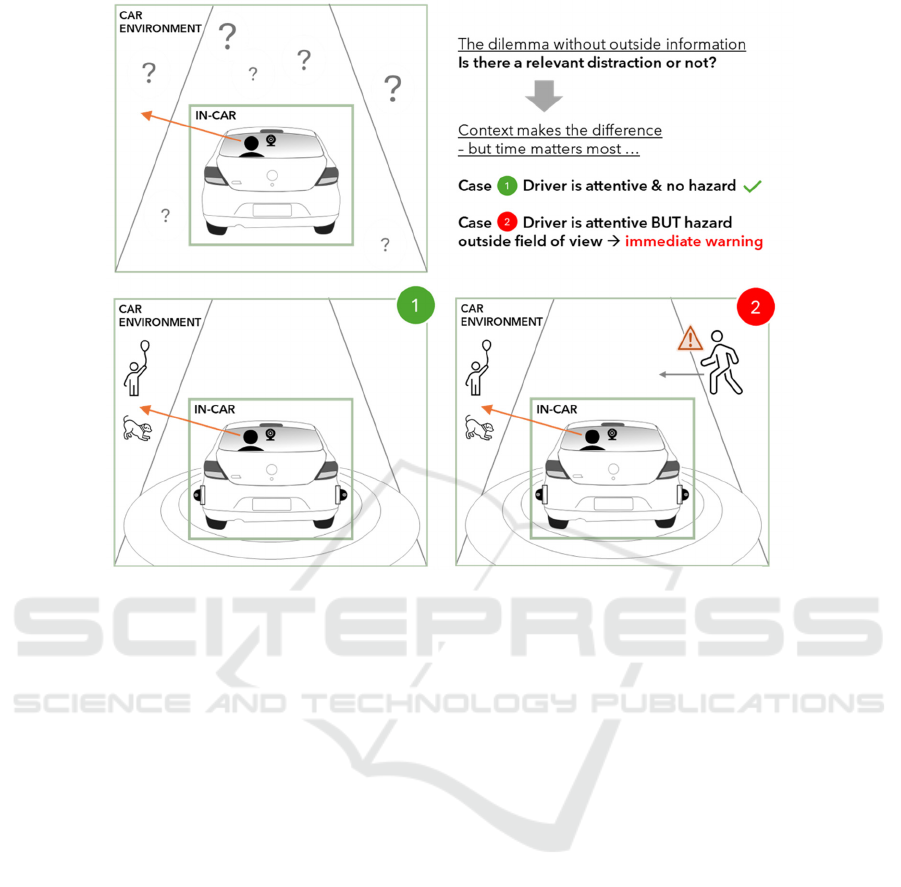
Figure 1: An example scenario that highlights the limitations of conventional systems.
disable these safety features altogether, ultimately
compromising their effectiveness.
Furthermore, most DMS architectures treat
inattention and distraction as an isolated, driver-
centric problem. They rarely consider how driver
inattention and distraction might impact other road
users in the surrounding environment, nor do they
issue proactive alerts to other road users and
especially to vulnerable road users who may be at risk
due to an inattentive driver. This lack of context-
awareness and bidirectional warning mechanisms
limits the broader safety potential of current driver
monitoring and warning systems.
2.2 Scenario: Context Aware Driver
Monitoring
Before outlining our proposed approach, we begin
with a user scenario that highlights the limitations of
conventional camera-based driver monitor warning
systems (Figure 1). These systems often struggle to
integrate the detected driver state with a dynamic,
contextual understanding of the external
environment, which can lead to delayed,
inappropriate, or misleading responses.
Imagine a vehicle navigating an urban
environment. A camera-based Driver Monitoring
System (DMS) tracks the driver's gaze and eye
movements, issuing warnings based on simple
heuristics—for example, triggering an alert if the
driver looks away from the road for an extended
period (see Figure 1, upper box).
As an example, the China NCAP safety rating for
driver attention monitoring systems mandates issuing
escalation alerts if the driver’s eyes are off the road
for more than 3 to 5 seconds (Medium, 2025). For
Europe, Euro NCAP defines a long distraction as a
single instance of the driver’s gaze away from the
forward road lasting between 3 and 4 seconds (Euro
NCAP, 2025).
Now consider the following situation: A driver
turns the gaze to the left and keeps watching a dog
and a child playing near the curb. The driver is
rightfully cautious and remains prepared to brake, as
this is an exceptional case where the general trust
principle does not apply. Although the driver is acting
safely and attentively, the system may still trigger a
distraction warning because it lacks awareness of the
context—specifically, that the off-road gaze is
purposeful and safety-motivated (Figure 1, lower left
box). Such false positives can frustrate the driver and
lead to disengagement or deactivation of the warning
system.
Now imagine that, simultaneously, a pedestrian
Context-Aware Warning Systems: Leveraging Driving Environment Data for Improved Driver and Road User Warnings
575
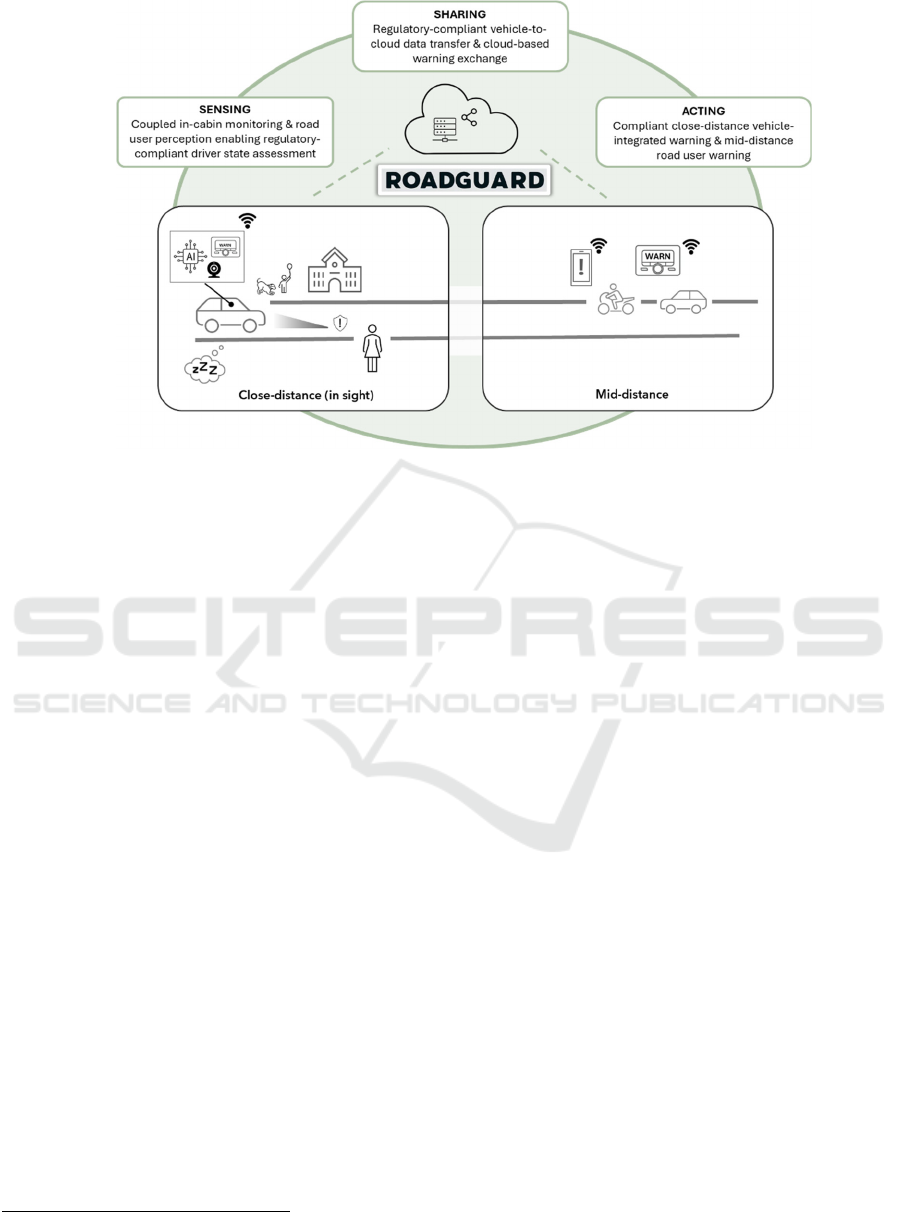
Figure 2:
The proposed
context-aware driver monitoring and warning
solution.
begins crossing the street from the right—outside
the driver’s current field of view, as their attention
remains focused on the child and dog. The driver fails
to notice the pedestrian, significantly increasing the
risk of a potentially fatal collision. Crucially, the
current Driver Monitoring System (DMS) would not
issue any alert in this situation because it lacks
situational awareness of the external environment and
the evolving traffic scenario (Figure 1, lower right
box). Additionally, the pedestrian is not warned that
the driver’s attention is elsewhere, leaving them
vulnerable. Finally, other road users remain unaware,
too, when a driver’s attention is diverted away from
the road.
3 SOLUTION APPROACH
Our proposed solution to be developed in the
roadguard project
5
is structured around three core
subsystems essential for context-aware driver
monitoring and warning: Sensing, Sharing, and
Acting (Figure 2). Together, these components form
an integrated framework for comprehensive safety
monitoring that addresses both the driver and
surrounding road users. At the heart of this
architecture are AI-enabled edge devices, which
enable real-time analysis and decision-making
directly within the vehicle.
5
Roadguard project description: https://projekte.ffg.at/
projekt/5126443
The Sensing subsystem captures data from both
inside and outside the vehicle, including driver state,
environmental context, and potential hazards, thereby
handling manifold data integration challenges on the
vehicle edge computer (cf. Kalayci et. al. 2021). The
Sharing subsystem manages the secure transmission
of relevant data across vehicles and infrastructure,
with a strong emphasis on data privacy and regulatory
compliance. The Acting subsystem plays a pivotal
role in delivering context-sensitive warnings, not only
to the driver but also to nearby vulnerable road users,
thereby enhancing situational awareness for all
parties.
Our tripartite framework aims to address the
shortcomings of current driver warning systems by
ensuring that relevant information is captured,
securely exchanged, and acted upon in a timely and
context-aware manner. The ongoing digitalization of
the automotive sector—coupled with advancements
in web technologies, IoT frameworks, and
standardized communication protocols—provides a
robust foundation for implementing such an
integrated system.
3.1 Sensing System: Contextual Data
Acquisition and Processing
The sensing system at the core of our approach
consists of two complementary subsystems designed
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
576
to monitor both the driver’s state and the external
driving environment. This dual-sensing strategy
provides a comprehensive and context-aware
understanding of risk, which is crucial for delivering
effective and timely warnings to drivers and other
road users.
The in-cabin sensing unit focuses on assessing the
driver’s attention and cognitive state. It incorporates
dual near-infrared (NIR) stereo cameras positioned to
unobtrusively monitor the driver’s head and eye
movements. Computer vision algorithms process the
stereo video streams to perform gaze estimation,
blink detection, head pose tracking, and fatigue
analysis. Driver state classification algorithms then
generate outputs such as attentive versus inattentive,
drowsy versus alert, and gaze-on-road versus gaze-
off-road indicators.
An external sensing unit captures the driving
context and detects potential hazards. This subsystem
includes RGB cameras and utilizes object detection
(cf. Kalayci et al. 2022) and tracking models to
identify vulnerable road users (VRUs), other
vehicles, and static obstacles in real time.
Additionally, trajectory prediction models forecast
the likely motion of detected road users, enabling the
system to anticipate emerging threats.
All sensor data, both internal and external, are
processed and fused on a dedicated in-vehicle edge
device equipped with AI inference capabilities. This
local processing unit enables real-time decision-
making under strict latency constraints. It evaluates
whether the driver’s current behaviour is safe within
the given environmental context and determines
whether a warning should be issued to the driver, to
nearby or mid-distance road users, or if data should
be securely shared externally with connected
infrastructure or vehicles, in full compliance with
data privacy standards.
3.2 Sharing System: Secure Data
Exchange and Ecosystem
Integration
Selected data, such as instances of critical driver
states or high-risk scenarios, are transmitted by the
Sharing subsystem through secure communication
channels to a centralized server infrastructure. This
transmission process adheres to data protection
regulations and ensures both the confidentiality and
integrity of sensitive information.
Once received, the data on the driver state follows
two primary pathways: integration into a training data
repository and contribution to other data spaces. A
subset of the collected data is anonymized and stored
in a dedicated training dataset to support the ongoing
enhancement of machine learning models for driver
state monitoring as well as environmental perception
and prediction. By incorporating real-world examples
into the training pipeline, the system enables adaptive
learning and continuous performance refinement.
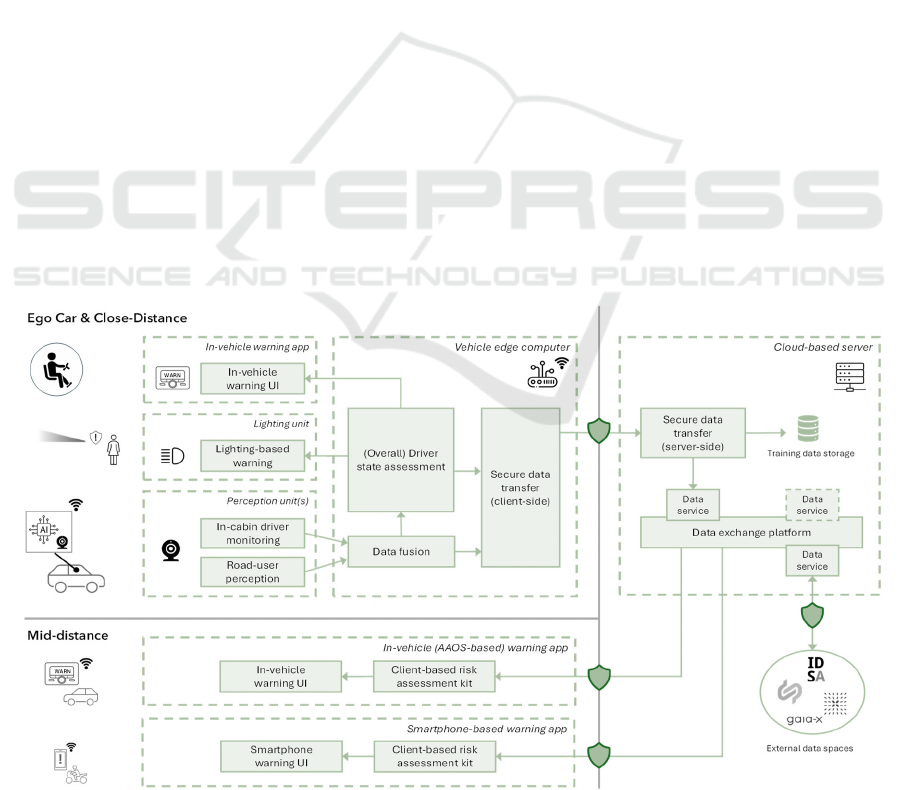
Figure 3:
The proposed high-level
architecture
of the solution.
Context-Aware Warning Systems: Leveraging Driving Environment Data for Improved Driver and Road User Warnings
577

In parallel, relevant portions of the data are shared
with broader mobility data ecosystems using
standardized protocols and interoperable connectors
(e.g., GAIA-X, IDSA). This facilitates data exchange
with external stakeholders such as traffic
management authorities, urban planners, and fleet
operators—enabling coordinated intelligence and the
development of advanced mobility services.
This dual-purpose data sharing approach
simultaneously supports real-time safety
interventions and long-term system advancement
through collaborative learning and ecosystem-wide
integration.
3.3 Acting System: Context-Aware
Warning Presentation
The Acting subsystem is responsible for issuing
context-sensitive warnings based on the combined
analysis of driver state and external environmental
data. It differentiates between warnings intended for
the ego vehicle—namely the driver and in-vehicle
systems—and those aimed at external road users in
close or mid-range proximity.
Warnings for the driver are delivered through a
dedicated user interface implemented as an
application running on the Android Automotive
Operating System (AAOS) (cf. Sterk et al., 2023).
This interface receives warning signals from the
sensing subsystem and provides real-time alerts using
visual cues such as screen overlays, ambient lighting,
or flashing icons, and auditory feedback such as tones
or voice prompts. This configuration ensures that the
driver receives immediate and relevant notifications
in situations involving distraction, inattention, or
emerging hazards.
For vulnerable road users in the immediate
vicinity of the vehicle, the system uses lighting-based
external warning signals. These can include flashing
headlights or taillights, projection-based indicators,
or dynamic lighting effects that visually communicate
a distracted driver state or imminent danger. These
warnings are designed to increase the situational
awareness of pedestrians and cyclists, particularly
when the driver is not fully attentive.
For road users at mid-range distances—such as
nearby vehicles or motorcycles—cooperative
warnings are issued via connected applications. In
vehicles equipped with AAOS, a connected warning
app receives relevant driver state information from
the sharing subsystem and displays appropriate alerts.
For motorcycles and other vehicles not equipped with
AAOS, a standalone Android mobile application is
under development to receive and visualize warnings.
If the data-sharing mechanism supports sufficiently
low-latency communication, both in-vehicle and
environmental perceptions - such as distractions
caused by other road users - can be shared in near
real-time to provide warnings to approaching drivers.
This approach extends the system’s safety reach
beyond the immediate surroundings of the vehicle
and supports broader cooperative awareness, which is
especially valuable in urban and mixed-traffic
environments.
4 TECHNICAL
CONSIDERATIONS
This position paper proposes a context-aware driver
monitoring system that integrates in-cabin data with
environmental information to deliver more effective
and relevant driver warnings. Unlike conventional
driver monitoring systems, which often suffer from
false-positive rates due to focusing on in-cabin
information only and neglecting external context, the
proposed approach fuses multiple data sources and
leverages AI-driven edge computing to enhance
decision-making. By combining insights from driver
behavior with real-time environmental perception,
the system not only improves the accuracy and
timeliness of driver alerts but also extends safety
benefits to vulnerable road users through cooperative
warnings. This context-aware design shows strong
potential to advance road safety, reduce distractions
from unnecessary alerts, and create a more proactive
and adaptive warning frmework.
However, several challenges remain. Ensuring
robust and reliable sensing under diverse real-world
conditions—such as adverse weather or complex
urban environments—requires ongoing refinement of
perception algorithms and models. Advanced AI
frameworks play a crucial role in this process by
enabling adaptive learning, sensor fusion, and
context-aware interpretation of multimodal data.
Leveraging techniques such as deep learning and
transfer learning allows the system to improve over
time by incorporating new data and handling edge
cases more effectively. Moreover, implementing AI
models on resource-constrained edge devices
demands efficient architectures and optimization
strategies to balance accuracy with real-time
performance and power consumption. Addressing
these challenges is essential to maintain high
detection accuracy, reduce false positives, and ensure
the system’s resilience in diverse driving scenarios.
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
578

In our sharing subsystem, choosing between
streaming services and simple REST interfaces
involves important trade-offs related to data
processing and fusion capabilities. Streaming
services typically require significant preprocessing
and formatting of data before transmission. This
upfront processing can limit flexibility downstream,
as the data arrives in a more fixed, aggregated form,
reducing the ability to perform on-the-fly merging or
complex fusion with other data sources at the
receiver’s end. On the other hand, REST interfaces,
where data is requested and received in discrete
chunks, allow for more dynamic handling. Since data
arrives in smaller, more raw pieces, it enables real-
time or on-demand computations and merging at the
receiver. This approach preserves the flexibility to
adapt processing strategies based on current context,
system state, or additional inputs, improving the
overall responsiveness and accuracy of fused
information. Therefore, while streaming services can
be beneficial for continuous high-throughput data
flows, they may constrain adaptability due to early-
stage preprocessing. RESTful approaches offer
greater flexibility for on-the-fly calculations and data
fusion but may introduce some latency due to the
request-response nature. Selecting the appropriate
method depends on the specific requirements for
latency, processing load, and fusion complexity in the
sharing subsystem.
As a first step and proof of concept, a simple
REST-based approach will be implemented. In this
setup, compressed messages containing basic
information—such as hazard type, time and
position—will be transmitted to the sharing
component. Receivers can retrieve these messages
based on a self-defined area of interest, allowing for
flexible control over update frequency and the
volume of data processed at once. Additionally, the
sharing backend will automatically filter out outdated
information, reducing both data transfer and
computational load on the receiver side. In a
production-grade system, a hybrid approach
combining streaming, on-demand requests, and
potentially locally cached historical data on the
receiver side could offer an effective solution. This
setup would minimize data transfer, enable fast
message processing, and maintain flexibility in
selecting the type of data and update frequency
according to the receiver’s needs.
The Acting subsystem connects the system’s
insights to real-world safety actions by delivering
context-aware warnings to drivers and nearby road
users. Leveraging IoT principles and web
technologies, it enables seamless communication and
interaction across vehicles and devices. Integration
with Android Automotive OS (AAOS) allows the
system to deploy flexible, app-based warnings inside
the vehicle using native features like visual alerts and
sounds. Externally, the subsystem uses connected
lighting systems and projection-based signals to warn
vulnerable road users such as pedestrians and cyclists
in real time. Additionally, via secure web-based APIs
and standardized data-sharing protocols, mid-range
warnings are pushed to other vehicles or mobile
apps—extending situational awareness through
cooperative communication within an IoT-enabled
mobility ecosystem. This combination of modern
web standards, edge computing, and IoT connectivity
ensures adaptive, reliable, and comprehensive
warning delivery that enhances safety both inside and
beyond the vehicle.
Privacy and data security are critical
considerations, especially given the sensitive nature
of driver state data and the need for secure data
sharing across vehicles and infrastructure. User
acceptance and trust also hinge on minimizing
intrusive or excessive warnings, necessitating careful
calibration of system sensitivity and thoughtful
human-machine interface design.
A central aspect of our system design is strict
compliance with data protection and privacy
regulations, reflecting the dual nature of sensing both
inside and outside the vehicle. In-cabin driver
monitoring involves sensitive personal data, such as
driver images, which require explicit user consent and
stringent handling procedures. To address this,
driver-related data is processed locally on the
vehicle’s edge device and remains within the vehicle
unless lawful data sharing with explicit consent
occurs as managed by the secure data transfer
module, thus minimizing data exposure.
Conversely, external environmental monitoring
captures anonymized, non-identifiable information
about road users and hazards in public spaces, which
generally does not require individual consent but
follows privacy-by-design principles. The overall
architecture enforces stringent data governance,
ensuring personal data does not leave the vehicle
without proper safeguards, while external sensing
enhances safety without infringing on individual
privacy rights.
5 CONCLUSION
Our concept of a context-aware driver warning
system demonstrates how integrating in-cabin
monitoring with environmental sensing, enabled by
Context-Aware Warning Systems: Leveraging Driving Environment Data for Improved Driver and Road User Warnings
579

IoT and Web technologies, can significantly enhance
road safety. By leveraging edge AI and secure data
sharing, our system will deliver timely, relevant alerts
to drivers and other road users alike. Our tripartite
framework—Sensing, Sharing, and Acting—
addresses key limitations of conventional approaches,
reducing false positives and expanding cooperative
awareness.
ACKNOWLEDGEMENTS
The research presented in this paper was funded by
the Österreichische Forschungsförderungs-
gesellschaft mbH (FFG) under the “Digital Road User
Safeguarding: A Regulatory-Compliant, Contextual
Driver State Assessment & Road User Warning
System (ROADGUARD)” project.
REFERENCES
Ebinger, N., Neuhuber, N., Moser, J., Trösterer, S., &
Stocker, A. (2024). Which partially automated driving
function do drivers prefer? Results from two field
studies on public highways. Transportation
Engineering, 17, 100236.
European Commission (2022). EU Road Safety: Towards
"Vision Zero". https://cinea.ec.europa.eu/publications/
digital-publications/eu-road-safety-towards-vision-
zero_en
Euro NCAP, 2025. Safe Driving. Driver Engagement.
Protocol.
https://www.euroncap.com/media/85854/euro-ncap-
protocol-safe-driving-driver-engagement-v10.pdf
Kaiser, C., Festl, A., Pucher, G., Fellmann, M., & Stocker,
A. (2019). The Vehicle Data Value Chain as a
Lightweight Model to Describe Digital Vehicle
Services. In WEBIST (pp. 68-79).
Kaiser, C., Stocker, A., Viscusi, G., Fellmann, M., &
Richter, A. (2021). Conceptualising value creation in
data-driven services: The case of vehicle data.
International Journal of Information Management, 59,
102335.
Kalayci, T. E., Kalayci, E. G., Lechner, G., Neuhuber, N.,
Spitzer, M., Westermeier, E., & Stocker, A. (2021).
Triangulated investigation of trust in automated
driving: Challenges and solution approaches for data
integration. Journal of Industrial Information
Integration, 21, 100186.
Kalayci, T. E., Ozegovic, G., Bricelj, B., Lah, M., &
Stocker, A. (2022). Object detection in driving datasets
using a high-performance computing platform: A
benchmark study. IEEE Access, 10, 61666-61677.
Large, D. R., Harvey, C., Burnett, G., Merenda, C., Leong,
S., & Gabbard, J. (2017). Exploring the relationship
between false alarms and driver acceptance of a
pedestrian alert system during simulated driving.
Liu, Z., Zhang, W., & Zhao, F. (2022). Impact, challenges
and prospect of software-defined vehicles. Automotive
Innovation, 5(2), 180-194.
Li, C., Xu, A., Sachdeva, E., Misu, T., & Dariush, B. (2024,
May). Optimal Driver Warning Generation in Dynamic
Driving Environment. In 2024 IEEE International
Conference on Robotics and Automation (ICRA) (pp.
14184-14190). IEEE.
Matalonga, S., Amalfitano, D., Solari, M., Hauck, J. C. R.,
& Travassos, G. H. (2025). Testing Context-Aware
Software Systems From the Voices of the Automotive
Industry. IEEE Transactions on Industrial Informatics.
Medium (2025), China NCAP Explained: New Safety
Ratings for Driver Monitoring and In-Cabin Systems,
May 14, 2025.
Michelaraki, E., Katrakazas, C., Kaiser, S., Brijs, T., &
Yannis, G. (2023). Real-time monitoring of driver
distraction: State-of-the-art and future insights.
Accident Analysis & Prevention, 192, 107241.
Navarro, J., Yousfi, E., Deniel, J., Jallais, C., Bueno, M., &
Fort, A. (2016). The impact of false warnings on partial
and full lane departure warnings effectiveness and
acceptance in car driving. Ergonomics, 59(12), 1553-
1564.
Otto, S., Wlcek, M., & Wortmann, F. (2025). Towards
Conceptualizing Software-Defined Vehicles: A
Systematic Review and Future Research Avenues.
Piccinini, E., Hanelt, A., Gregory, R., & Kolbe, L. (2015).
Transforming industrial business: The impact of digital
transformation on automotive organizations.
International Conference on Information Systems
(ICIS).
Regan, M. A., Hallett, C., & Gordon, C. P. (2011). Driver
distraction and driver inattention: Definition,
relationship and taxonomy. Accident Analysis &
Prevention, 43(5), 1771-1781.
Silla, A., Rämä, P., Leden, L., Van Noort, M., de Kruijff,
J., Bell, D., Morris, A., Hancox, G., and Scholliers, J.
(2017). Quantifying the effectiveness of ITS in
improving safety of VRUs. IET Intelligent Transport
Systems, 11(3), 164-172.
Sterk, F., Stocker, A., Heinz, D., & Weinhardt, C. (2024).
Unlocking the value from car data: A taxonomy and
archetypes of connected car business models.
Electronic Markets, 34(1), 13.
Sterk, F., Heinz, D., Hengstler, P., & Weinhardt, C. (2023).
Reallocating uncertainty in incumbent firms through
digital platforms: The case of Google’s automotive
ecosystem involvement. ICIS 2023 Proceedings, 1, 16.
Stocker, A., Kaiser, C., & Fellmann, M. (2017). Quantified
vehicles: Novel services for vehicle lifecycle data.
Business & information systems engineering, 59, 125-
130.
Stocker, A., Lechner, G., Kaiser, C., & Fellmann, M.
(2021). Digitalized Mobility. In Americas Conference
on Information Systems (AMCIS).
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
580

Stocker, A., Kaiser, C., Lechner, G., & Fellmann, M.
(2024). A conceptual framework for mobility data
science. IEEE Access.
Stocker, A. (2025). User Archetypes of Physical AI
Systems: Insights from an Automated Driving Field
Study, European Conference on Information Systems -
ECIS.
Trager, J., Kalová, L., Pagany, R., & Dorner, W. (2021).
Warning apps for road safety: A technological and
economical perspective for autonomous driving–the
warning task in the transition from human driver to
automated driving. International Journal of Human–
Computer Interaction, 37(4), 363-377.
Yoo, Y., Henfridsson, O., Kallinikos, J., Gregory, R.,
Burtch, G., Chatterjee, S., & Sarker, S. (2024). The next
frontiers of digital innovation research. Information
Systems Research, 35(4), 1507-1523.
Context-Aware Warning Systems: Leveraging Driving Environment Data for Improved Driver and Road User Warnings
581
