
Improving Industrial Interoperability and Scalability Through OPC-UA
and Smart Object-Based Architectures
Guilherme Coelho
1
, Liliana Ant
˜
ao
1 a
, Beatriz Coutinho
1 b
, Gil Gonc¸alves
1 c
,
Ant
´
onio Augusto
2
and Miguel Moura
2
1
SYSTEC ARISE, Faculdade de Engenharia, Universidade do Porto, Rua Dr. Roberto Frias, 4200-465 Porto, Portugal
2
Idepa - Ind
´
ustria de Passamanarias, Lda, Portugal
Keywords:
OPC-UA, Industry 4.0, Smart Object, Data Model.
Abstract:
This paper presents the development and implementation of a remote monitoring and control system for indus-
trial machines, aligned with the principles of Industry 4.0. The proposed solution builds under the Advanced4i
work package of the PRODUTECH R3 initiative, addressing key limitations in industrial digitalization scala-
bility, responsiveness, and usability. A redesigned architecture is introduced, build upon a previous data model
and architecture by Neto et al., featuring advanced communication protocols, a refactored LabVIEW-based in-
terface, and a middleware layer to enhance data flow and synchronization. A structured data model and an
optimized graphical user interface further enable real-time monitoring and remote configuration. The system
was validated in a real-world deployment at IDEPA, a real manufacturing company a leader in the labels,
tapes, and textile accessories markets , integrating over 30 sensors, and subsequently scaled to support up to
85 sensors with minimal data loss and high responsiveness under operational stress. The results demonstrate
capability of maintaining monitoring performance and scalability, offering a practical roadmap for the deploy-
ment of interoperable and modular Industry 4.0 solutions in manufacturing environments.
1 INTRODUCTION
Industry 4.0 has transformed manufacturing through
digitalization, real-time data exchange, and intelli-
gent automation. A core requirement of this shift is
the ability to remotely monitor and control machin-
ery to optimize processes, reduce costs, and improve
efficiency. However, many current solutions strug-
gle with scalability and usability in complex, hetero-
geneous environments (Pisching et al., 2018; Boyes
et al., 2018; Danys et al., 2022).
To address these challenges, the Reference Ar-
chitecture Model for Industry 4.0 (RAMI 4.0) pro-
vides a structured framework for designing and de-
ploying Industry 4.0 systems. By combining product
lifecycles, hierarchy levels, data types, and technol-
ogy layers into a multidimensional Service-Oriented
Architecture(SOA), RAMI 4.0 enables consistent
modeling and analysis of smart manufacturing sys-
tems (Pisching et al., 2018; Morgan et al., 2021).
a
https://orcid.org/0000-0002-2903-0989
b
https://orcid.org/0009-0000-9769-6726
c
https://orcid.org/0000-0001-7757-7308
Furthermore, the inclusion of the Asset Adminis-
tration Shell (AAS) within the RAMI 4.0 framework
significantly enhances its practical relevance. The
AAS serves as the ”digital twin” of physical assets,
enabling standardized data management and interop-
erability across diverse industrial platforms (Pisching
et al., 2018).
This paper presents a scalable and modular sys-
tem architecture aligned with RAMI 4.0 principles,
designed to enhance remote monitoring, configurabil-
ity, and real-time diagnostics in industrial automation.
The proposed solution emphasizes fault isolation, dy-
namic reconfiguration, and integration with existing
OPC Unified Architecture (OPC UA) infrastructures,
addressing key limitations of current monitoring sys-
tems. Furthermore, it contrasts the proposed design
with the architecture previously implemented in (Neto
et al., 2019), highlighting key differences such as the
introduction of a middleware layer and modifications
to the LabView environment.
Coelho, G., Antão, L., Coutinho, B., Gonçalves, G., Augusto, A. and Moura, M.
Improving Industrial Interoperability and Scalability Through OPC-UA and Smart Object-Based Architectures.
DOI: 10.5220/0013802900003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 457-468
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
457

1.1 Advanced 4I PRODUTECH-R3
Project
This work was carried out within the framework of an
existing work package known as Advanced4i, which
is a part of a larger project called PRODUTECH R3
– Recovery-Resilience-Reindustrialization, a Mobi-
lizing Agenda of Production Technologies for Rein-
dustrialization. Advance4i aims to strengthen the na-
tional industry’s ability to compete in an increasingly
demanding market in terms of sustainability while re-
ducing energy and operating costs. Given the Euro-
pean Union’s sustainability targets, it is necessary to
integrate solutions based on IoT (Internet of Things),
predictive maintenance, and energy efficiency tech-
nologies. Energy efficiency, which is often neglected
in poorly digitized industrial environments, suffers
from a lack of visibility of the associated costs. Ad-
vance4i aims to reverse this reality by providing trans-
parency on energy consumption at different levels,
from production lines to specific equipment and pro-
cesses. Specifically, this paper will focus on adapting
the basis of the digitalization architecture defined.
1.2 Smart Box
This work builds upon a foundational Industry 4.0
aligned project focused on digitalizing factory oper-
ations to improve monitoring, control, and efficiency.
The initial implementation at IDEPA a leading man-
ufacturer of labels, tapes, and textile accessories in-
volved the integration of approximately 30 sensors.
While successful, the current LabVIEW based solu-
tion faces challenges related to scalability, reliability
under load, and user accessibility. These limitations,
including data loss and system instability, highlight
the need for a more robust and user-friendly architec-
ture. This Section reviews the existing implementa-
tion, identifies its shortcomings, and outlines poten-
tial improvements.
The Smart Box and its related components, shown
in Fig. 1, integrates an OPC-UA server, a LabVIEW
application, and a Backoffice system, deployed on a
CompactRIO 9040 industrial computer. This archi-
tecture aimed to enable real-time data exchange and
control within a factory environment through Smart
Object Self Descriptor (SOSD) based configuration.
1.3 Smart Object
The Smart Object, also referred to as the Smart Ob-
ject Self Descriptor (SOSD), is a comprehensive data
model designed to encapsulate the complete set of
system-level information relevant to a given industrial
component. As a digital abstraction, the SOSD em-
bodies the essential characteristics of the Component
4.0 Paradigm, a foundational concept within the Ref-
erence Architectural Model for Industry 4.0 (RAMI
4.0) framework. This alignment ensures robust com-
pliance with key principles of Industry 4.0, particu-
larly those related to interoperability, modularity, and
decentralized control (Neto et al., 2020).
The Smart Object model is not merely a static de-
scriptor, but an active, semantically rich representa-
tion of both the internal configuration of a compo-
nent and its dynamic relationships with other entities
within the system. By explicitly modeling structural,
functional, and behavioral aspects, the SOSD enables
seamless integration into Industry 4.0-compliant en-
vironments.
In the context of this work, the SOSD serves as the
foundational construct for the proposed data model.
It facilitates a unified description of system compo-
nents, allowing for enhanced system-level orchestra-
tion and intelligent decision-making. The adoption of
this model is instrumental in achieving higher degrees
of automation, resilience, and scalability in industrial
production systems.
2 RELATED WORK
To address the identified problems, research was con-
ducted to evaluate existing industrial solutions and ex-
plore potential technologies that could complement or
replace the current system. The investigation began
with an analysis of the Industry 4.0 paradigm to un-
derstand its relevance and requirements. This was fol-
lowed by a study of alternative communication proto-
cols and a deeper examination of the advantages and
limitations of the OPC-UA protocol that is currently
under use.
The digital transformation of industrial sectors has
been an increasingly prominent topic of academic and
industrial discussion. Several works have explored
the intersection between industrialization and digital-
ization, highlighting the pervasive impact of emerging
technologies across different sectors.
In particular, the work in (Neto et al., 2019) em-
ploys the same data Modeling approach as this study,
this being the Smart Object Self Descriptor (SOSD).
Their research validates the relevance and applicabil-
ity of the chosen methods in analyzing digital trans-
formation trends. The reuse of these approaches,
along with their consistent findings, demonstrates that
this topic has already received considerable attention
in the literature.
Moreover, other studies such as (Neto et al., 2020)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
458
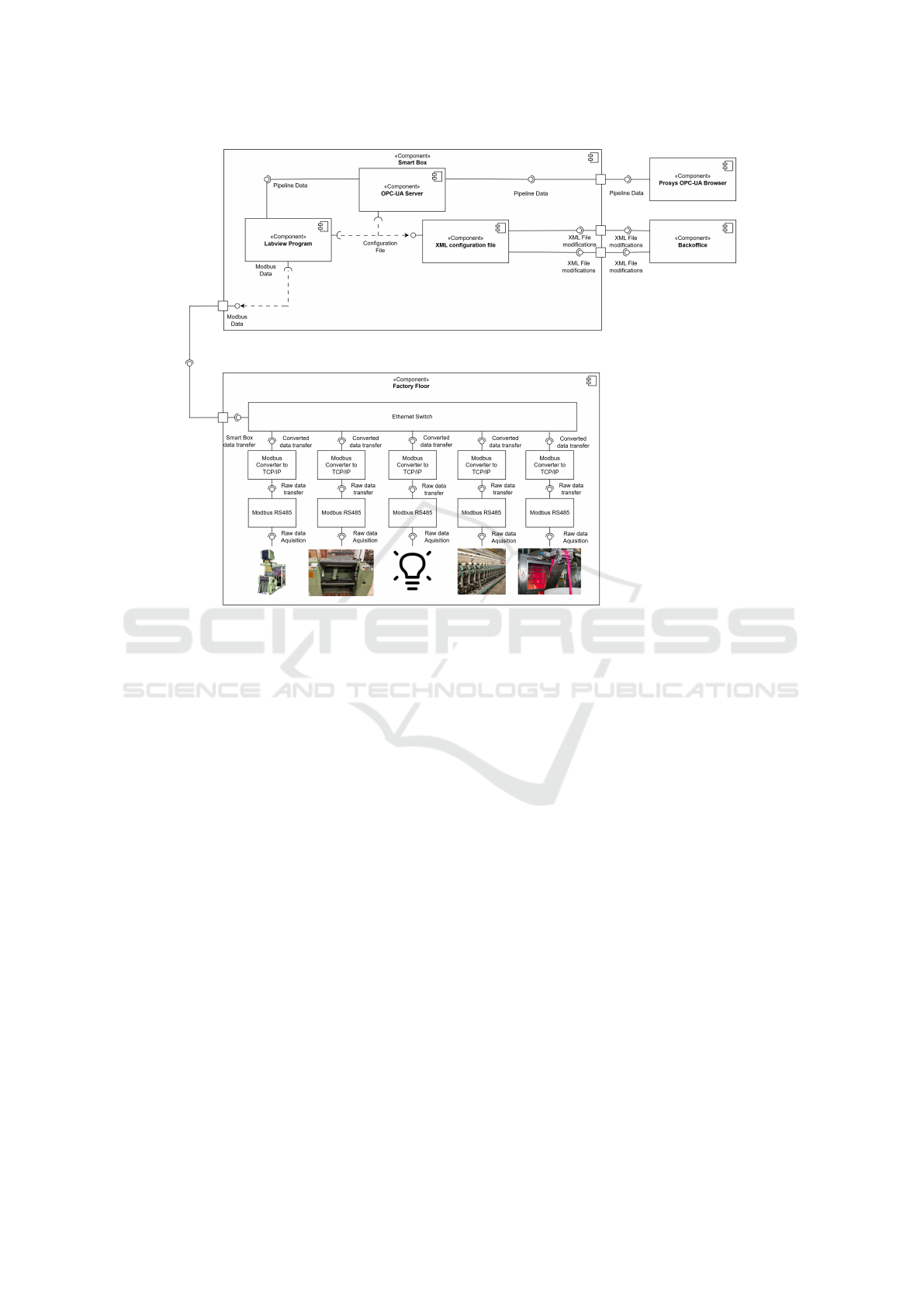
Figure 1: Smart Box and related components.
provide a broader perspective on the digitalization and
industrialization of various industries. These works
focus on the structural and operational shifts driven by
digital technologies, particularly in traditionally non-
digital sectors.
For instance, one paper specifically addresses the
food industry and its ongoing industrial transforma-
tion (Demartini et al., 2018). It highlights how digital
technologies are not confined to sectors such as tex-
tiles but are also being rapidly adopted in the food
sector. The paper also analyzes the number of publi-
cations over time, underscoring the growing academic
interest and the emergence of this topic in diverse sec-
tors of industry.
Another relevant contribution is the study focused
on industrialization within the broader economic sec-
tor (Zhang and Li, 2023). Similar to the aforemen-
tioned works, it discusses the rising imperative for
digitalization across all industrial domains. This work
reinforces the notion that digital transformation is not
an isolated phenomenon, but rather a global necessity
affecting all branches of the industrial economy.
A particularly comprehensive study is offered in
(Bauer et al., 2018), which evaluates over 385 In-
dustry 4.0 use cases across German industrial sec-
tors. This large-scale review categorizes applications
based on their technological maturity—namely, infor-
mation, interaction, and intelligence—and sheds light
on real-world deployment of digital solutions in do-
mains such as production, logistics, engineering, and
services. The findings show that while the majority
of applications are still in the “information” phase
(data availability and transparency), there is a sig-
nificant trend toward integrating interaction-level and
intelligence-level systems that support real-time re-
sponsiveness and autonomous decision-making. The
study also emphasizes human-centric approaches, un-
derlining the importance of Human-Technology Inter-
action and the evolving role of workers in digitalized
environments. These insights are crucial in framing
digital transformation not only as a technical upgrade
but also as a sociotechnical evolution that involves
new models of cooperation, substitution, and collab-
oration between humans and machines.
Together, these studies provide a comprehensive
overview of ongoing efforts to understand and support
digital transformation in industrial contexts. They
collectively emphasize the strategic importance of in-
tegrating digital technologies to enhance productiv-
ity, efficiency, and innovation across various indus-
trial sectors.
Improving Industrial Interoperability and Scalability Through OPC-UA and Smart Object-Based Architectures
459
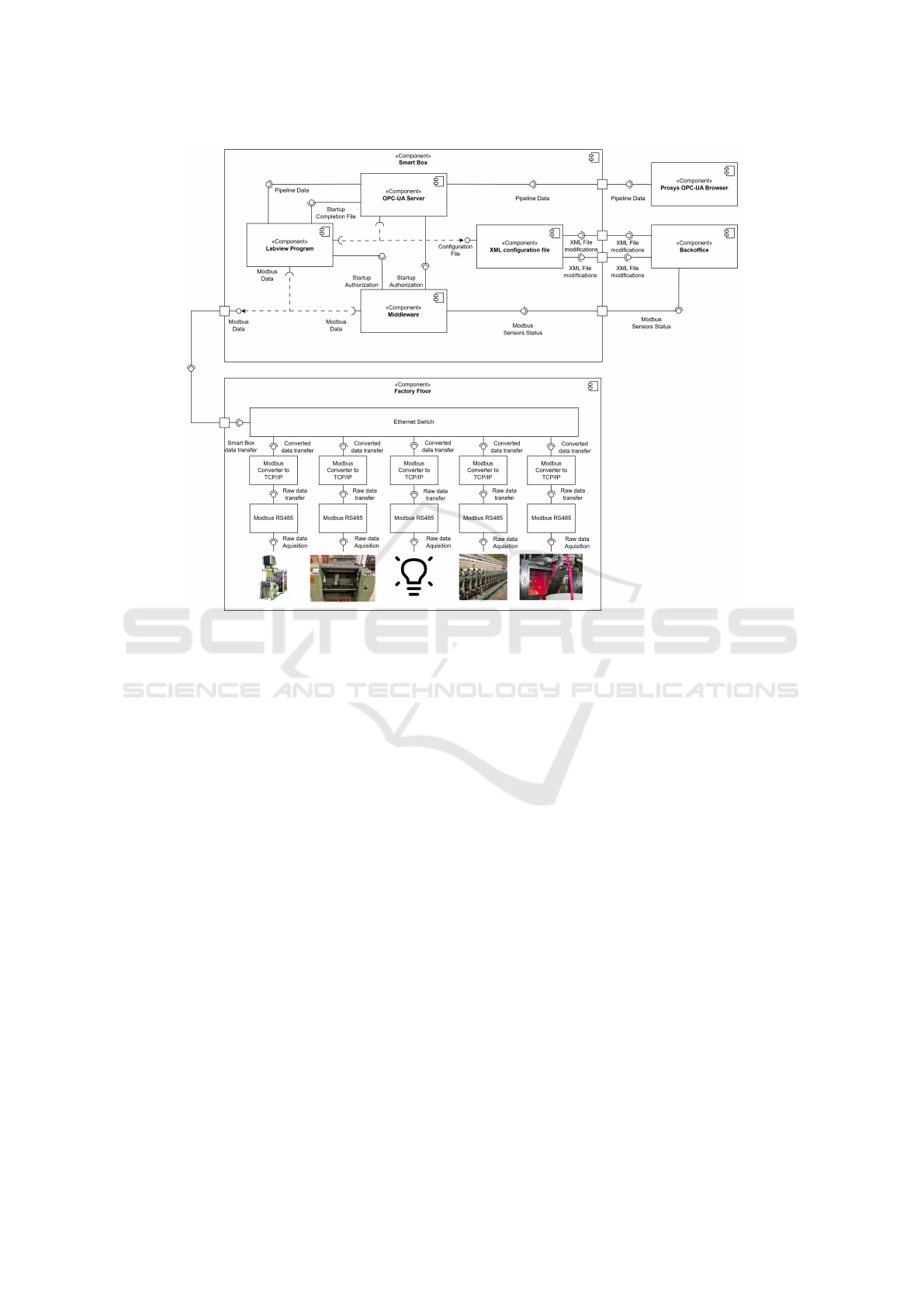
Figure 2: Proposed System architecture.
3 IMPLEMENTATION
In the proposed solution all the modules of the sys-
tem were subject to change, retaining core functional-
ity while improving system robustness and scalability.
The updated design is shown in Figure 2.
A major architectural improvement is the middle-
ware layer, which decouples system components and
mitigates previous instability issues. This facilitates
modularity, scalability, and easier maintenance. Con-
sequently, a custom middleware was implemented to
ensure efficient synchronization and information flow,
maintaining system coherence and reliability. The
middleware’s design and functional benefits are de-
tailed in the following sections.
A refined control and data acquisition system was
developed for the IDEPA factory floor using a Com-
pactRIO 9040, serving as a local industrial controller
interfacing directly with factory-floor machines and
sensors. This unit enables real-time monitoring and
control, hosts the LabVIEW-based logic, and inte-
grates an OPC-UA server that exposes sensor data
in accordance with the Industry 4.0 (I4.0) component
model for standardized communication.
3.1 Data Model
The SOSD model facilitates the transformation of
physical assets such as machines, sensors, and actu-
ators into digital entities that are accessible via the
OPC-UA network. As a digital representation of
Component 4.0, SOSD enables the modeling of com-
plex industrial environments by providing a flexible
and standardized framework to define attributes, be-
haviors, and interrelationships among various manu-
facturing components (Neto et al., 2020)(Torres et al.,
2022).
The SOSD Architecture can be seen in the follow-
ing Figure 3, where we can see all the components
and relationships that compose the model.
The device Set shown in the Figure 3 is composed
by equipments and Sensors, which represent 2 differ-
ent types of data. The Equipments have a descrip-
tion and a collection of Sensors equipments. The Sen-
sor type of data represents a digitalization of the fac-
tory floor Sensor, with all its variables and subscribed
equipment. This data model is written in modeled Ex-
tensible Markup Language (XML).
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
460
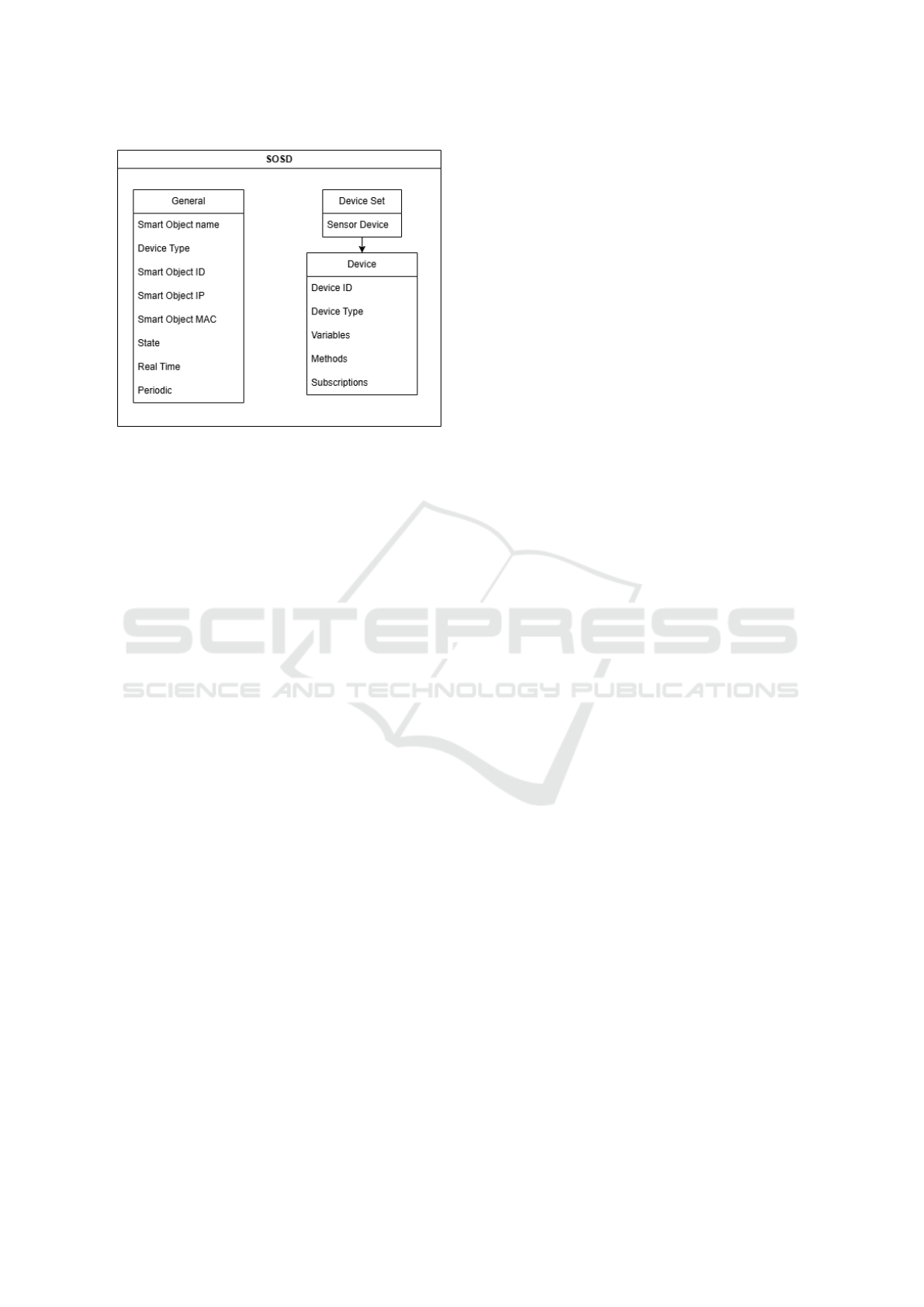
Figure 3: SOSD Architecture.
3.2 OPC-UA Server
The OPC-UA server exposes factory data through a
structured Smart Object Self Descriptor (SOSD) rep-
resented in XML format. This serves as the basis for
dynamically generating data pipelines and mapping
them to a dedicated namespace. The exposed data
is also accessible through standard tools such as the
Prosys OPC-UA Viewer, facilitating monitoring and
validation of system behavior.
Building upon the existing OPC-UA server infras-
tructure, several enhancements were introduced to ex-
tend its functionality and improve operational robust-
ness. The pipeline creation process was systemati-
cally restructured to streamline operations, reducing
initialization latency and improving overall startup ef-
ficiency. Additionally, a graceful shutdown mecha-
nism was implemented to enable autonomous and re-
liable termination of the server process without re-
quiring manual intervention, thereby supporting bet-
ter integration in automated environments.
To further enhance system interoperability, a file-
based handshake protocol was introduced to synchro-
nize the OPC-UA server with the LabVIEW interface
during startup. This coordination mechanism effec-
tively mitigates race conditions and ensures temporal
alignment between components
3.3 Data Acquisition Program
The LabVIEW program operates as the core data ac-
quisition and preprocessing service within the system
architecture. It interfaces with the Modbus communi-
cation bus to retrieve real-time sensor and equipment
data, processes the acquired values, and subsequently
transmits them through the data pipelines provisioned
by the OPC-UA server. During initialization, the Lab-
VIEW application parses the SOSD XML file to iden-
tify and configure the relevant Modbus registers and
associated IP addresses. This file is transformed into
a structured representation of devices, enabling sys-
tematic access to the underlying industrial assets.
To enhance the system’s modularity, scalability,
and performance, several architectural improvements
were introduced to the LabVIEW implementation.
The XML parsing logic was refactored to decouple
equipment and sensor definitions into two distinct
data structures. This abstraction promotes cleaner
code organization and facilitates future extensibility.
To ensure reliable coordination with the OPC-UA
server, a file-based synchronization protocol was im-
plemented. This mechanism enforces a startup depen-
dency, ensuring that LabVIEW initiates communica-
tion only after the OPC-UA server is fully operational,
thereby eliminating race conditions.
The most significant advancement lies in the re-
design of the data acquisition loop to support parallel
execution. Each equipment unit is managed within its
own dedicated thread, and sensor polling is handled
independently, allowing for concurrent Modbus in-
teractions. This multithreaded approach significantly
improves the system’s responsiveness and fault toler-
ance—ensuring that communication failures with in-
dividual sensors do not propagate through the acqui-
sition cycle. While the transition to parallelism in-
troduces higher CPU load, it also opens opportunities
for hardware-specific optimizations to balance perfor-
mance and resource utilization.
3.4 Middleware Component
A dedicated middleware was developed to coordinate
LabVIEW and the OPC-UA server. Beyond manag-
ing synchronization, it validates Modbus configura-
tions and logs channel availability. These diagnos-
tics are exposed to the Backoffice interface, provid-
ing operators with real-time feedback on sensor sta-
tus. The middleware also handles server lifecycle
management, including shutdown commands, ensur-
ing that system components remain decoupled and in-
dependently manageable.
3.5 Industrial Backoffice
Finally, an integral component of the system archi-
tecture is the Backoffice, a locally hosted web ap-
plication that provides a graphical interface for real-
time system interaction and oversight. Designed as
a lightweight yet extensible control layer, the Back-
office facilitates secure, remote access to the SOSD
Improving Industrial Interoperability and Scalability Through OPC-UA and Smart Object-Based Architectures
461
XML configuration file through a browser-based in-
terface. Authorized personnel can inspect, modify,
and manage system configurations without interrupt-
ing ongoing data acquisition, enabling continuous
system operation and reducing maintenance down-
time.
To extend its utility and align with the overall
goals of system modularity and observability, the
Backoffice interface underwent a series of enhance-
ments. The graphical user interface (GUI) was aug-
mented to support full visibility into system compo-
nents, including detailed information on Modbus con-
figurations, sensor to equipment mappings, and OPC-
UA pipeline statuses. This extended view provides
maintainers with granular insights necessary for sys-
tem diagnostics and performance tuning.
Built on a modern web stack, the updated Back-
office allows interactive manipulation of the XML-
based SOSD model. Equipment and sensor entities
can be added, removed, or edited through the inter-
face without requiring direct modification of the Lab-
VIEW application or server-side code. These updates
are retained persistently and applied during the next
system restart, during which the OPC-UA server re-
registers all updated elements based on the revised
configuration. Furthermore, in-place XML editing,
element reordering, and backup creation capabilities
have been added to improve usability and configura-
tion traceability.
To support runtime transparency, middleware-
generated diagnostics—such as sensor connectiv-
ity status, polling errors, and synchronization re-
ports—are now integrated into the Backoffice dash-
board. This provides operators with real-time feed-
back on system health and aids in rapid identification
of faults.
These advancements reflect a broader effort to el-
evate the system’s architectural maturity. Improve-
ments to the Backoffice were developed in conjunc-
tion with enhancements to other subsystems, includ-
ing the modularization of the LabVIEW interface, re-
structuring of the XML schema, increased OPC-UA
reliability, and the introduction of a middleware layer
to orchestrate inter-component synchronization. Col-
lectively, these improvements foster greater scalabil-
ity, resilience, and user-centric control within the In-
dustry 4.0-compliant system.
4 TESTING AND RESULTS
This section presents the evaluation outcomes of the
proposed industrial monitoring system, with empha-
sis on scalability, stability, efficiency, and practi-
cal deployment, particularly in environments like the
IDEPA factory floor.
To assess the scalability and effectiveness of the
proposed architecture, a comprehensive test suite was
designed to replicate a range of industrial scenarios
typical of the IDEPA factory floor. Each test was ex-
ecuted on both the previous and proposed system ar-
chitectures to allow direct performance comparison.
Five representative operational scenarios were de-
fined to emulate varying levels of system complexity:
• Low Complexity: 2 equipments with 2 sensors
each.
• Medium Complexity (Baseline): 3 equipments
with 5 sensors each.
• High Complexity: 3 equipments with 10 sensors
each.
• Stress Test: Maximum load using 6 equipments
with 10 sensors and high acquisition frequency.
• Centralized Deployment: All sensors connected
to a single equipment, compared against the dis-
tributed configuration.
Each scenario was run under multiple sampling
rates (2s, 1s, 0.5s) to measure responsiveness and re-
liability under dynamic conditions.
Tests were conducted using a CompactRIO 9040
with NI Linux Real-Time OS, replicating the de-
ployed environment at IDEPA. Sensors aggregate into
logical equipments, sending data via an Ethernet
switch to the Smart Box. Varying key system param-
eters helped simulate realistic operating conditions:
• Equipments: 2 to 6
• Sensors/Equipment: 2 to 10
• Acquisition Rate: 2s to 0.5s
The summary of all test configurations is shown
in Table 1.
Table 1: Summary of Test Cases and Configuration Param-
eters.
Test ID Complexity Level Equip. Sensors Rate (s)
1 Medium 3 5 2
1.1 Medium - centralized 3 5 2
2 Medium 3 5 1
3 Medium 3 5 0.5
4 Low 2 2 2
4.1 Low - centralized 2 2 2
5 Low 2 2 1
6 Low 2 2 0.5
7 High 3 10 2
7.1 High - centralized 3 10 2
8 High 3 10 1
9 High 3 10 0.5
10 Extreme 6 10 2
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
462
To objectively assess system performance and en-
sure comparability between the two architectures, a
set of quantitative metrics was defined:
• OPC UA Server Setup Time: Time to initialize
and expose the full server namespace, measured
via server stdout timestamps.
• CPU Utilization: Average and peak processor
load during runtime, indicating computational ef-
ficiency.
• RAM Usage: Memory footprint during opera-
tion, collected via a Python script for later anal-
ysis.
• System Stability: Frequency of runtime errors,
data loss, or crashes, assessed from test logs.
• Jitter: Variability between sensor acquisition and
OPC UA node updates, measured and analyzed by
data collection done with Python.
4.1 Baseline Evaluation: Tests 1–3
To establish a reliable foundation for subsequent eval-
uations, a baseline test was executed. This comprises
three distinct tests using a setup consisting of three
equipment units, each with five sensors, for a total of
fifteen sensor data streams. Each test scenario eval-
uated both the sequential and the proposed (multi-
threaded) data acquisition architectures under increas-
ing levels of data acquisition frequency. These tests
were designed to provide insight into system behav-
ior in terms of CPU and RAM utilization, data ac-
quisition latency (measured as jitter), and operational
responsiveness (startup time).
All test scenarios were run for a duration of ap-
proximately 10 minutes, during which relevant per-
formance data was captured for comparative analysis.
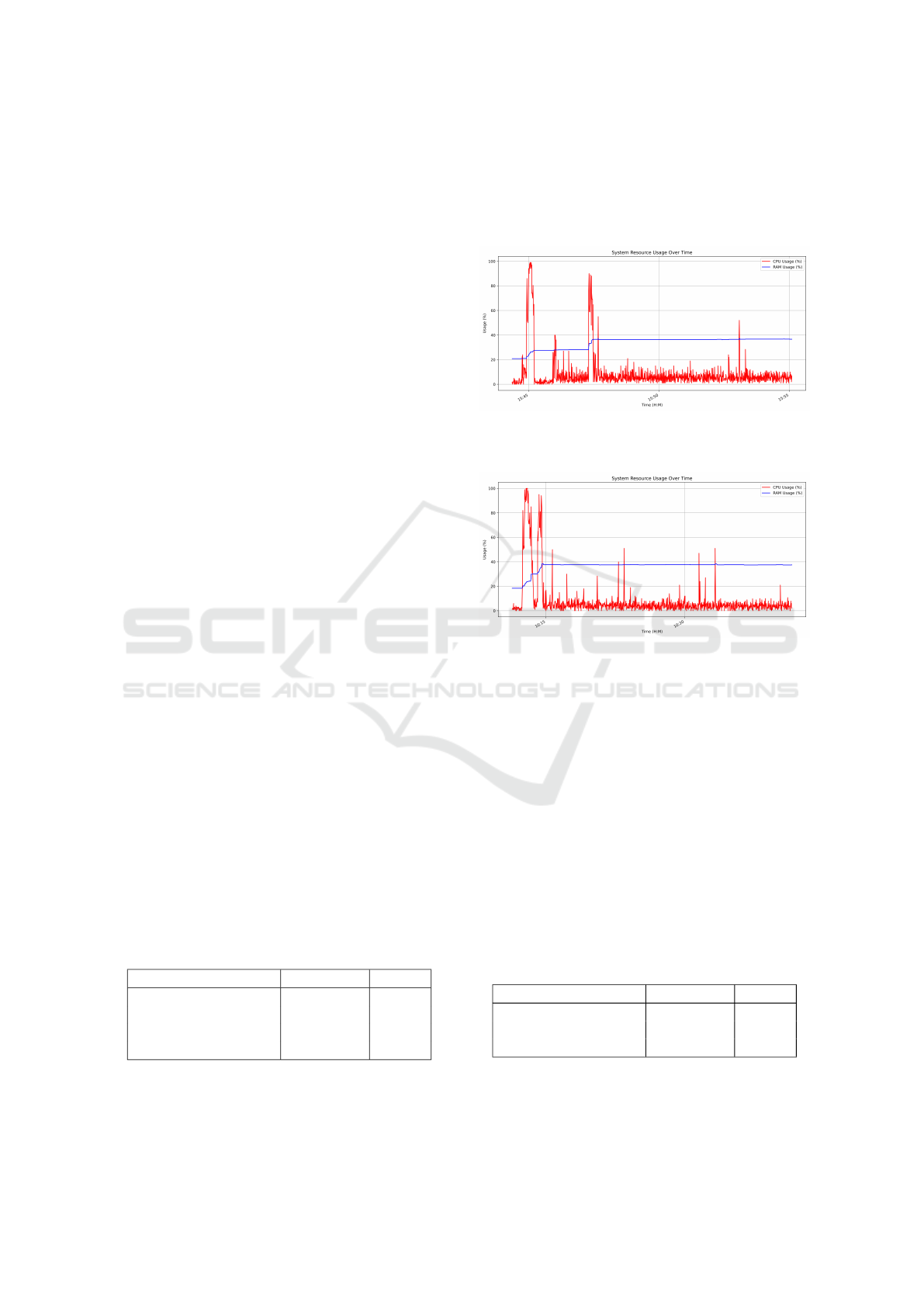
Test 1: Low-Frequency Acquisition (2 Seconds)
Test 1 evaluated system performance at a 2-second ac-
quisition interval, representing a low-stress baseline.
Table 2 summarizes CPU, RAM, and jitter metrics for
both architectures.
Table 2: Comparison of Test 1: 2s Acquisition Interval.
Metric Sequential New
CPU Usage Max (%) 99.00 100.00
CPU Usage Avg (%) 8.90 8.16
RAM Usage Avg (%) 33.64 36.20
Jitter Avg. (s) 0.1845 0.0759
The new architecture matches the sequential sys-
tem’s CPU and RAM usage despite its multithreaded
design, while achieving significantly lower jitter, in-
dicating improved timing consistency. Figures 4 and
5 illustrate resource usage over time, highlighting re-
duced initialization overhead and smoother operation
in the new solution.
Figure 4: CPU and RAM Usage Over Time — Sequential
Architecture (Test 1).
Figure 5: CPU and RAM Usage Over Time — New Archi-
tecture (Test 1).
Conclusions:
• Both architectures show similar resource usage.
• The new architecture significantly reduces jitter.
• System responsiveness improves with the new de-
sign.
Test 2: Medium-Frequency Acquisition (1
Second)
At a 1-second interval, both systems exhibited slightly
increased CPU and RAM usage (Table 3), with the
new architecture maintaining lower jitter.
Table 3: Performance Metrics for Test 2: 1s Acquisition
Interval.
Metric Sequential New
CPU Usage Avg (%) 10.76 9.94
RAM Usage Avg (%) 37.48 37.80
Jitter Avg. (s) 0.1663 0.0505
Resource usage trends are consistent with Test 1.
The new architecture sustains better timing precision,
Improving Industrial Interoperability and Scalability Through OPC-UA and Smart Object-Based Architectures
463
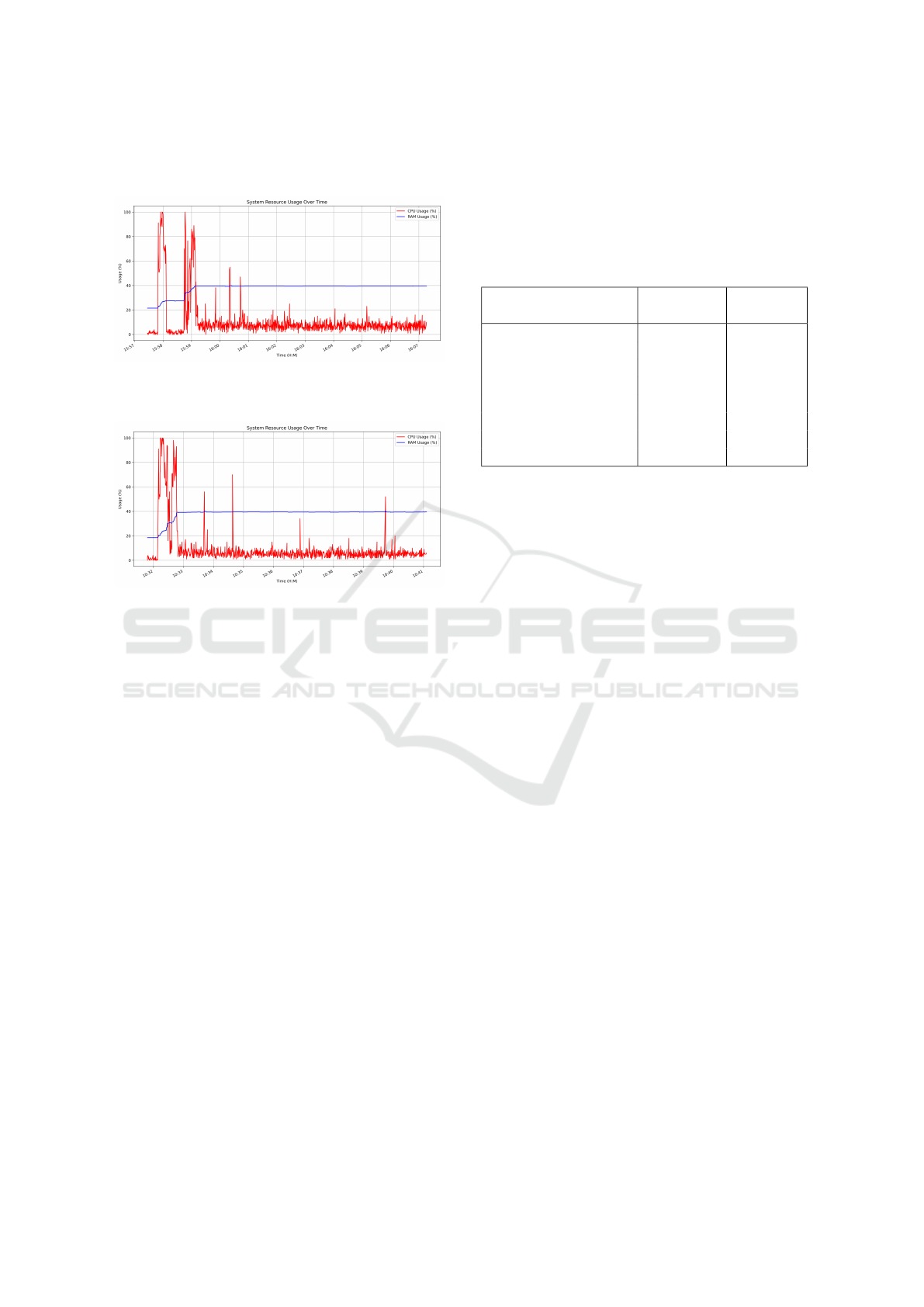
with over 50% jitter reduction. The behavior similar-
ity is evident in Figures 6 and 7.
Figure 6: CPU and RAM Usage Over Time — sequential
Architecture (Test 2).
Figure 7: CPU and RAM Usage Over Time — New Archi-
tecture (Test 2).
Test 3: High-Frequency Acquisition (0.5 Seconds)
At 0.5 seconds per sample, CPU usage nearly doubled
(averaging 16.04% sequential, 14.75% new), with
RAM usage stable. The new architecture maintained
superior jitter performance, demonstrating scalability
under high load (full results omitted for brevity).
Summary for Tests 1–3:
• The new architecture consistently reduces jitter,
enhancing timing accuracy.
• Multithreading did not increase resource con-
sumption significantly.
• Faster initialization and responsiveness favor the
new design.
4.2 Evaluation of Low Complexity
Scenarios: Tests 4–6
This subsection presents the results and analysis of
Tests 4, 5, and 6, which evaluate system behavior
under low-complexity configurations involving two
pieces of equipment, two sensors, and increasing data
acquisition frequencies. The tests were conducted, as
mentioned before, on a CompactRIO (cRIO) device.
Both the sequential and the newly proposed architec-
tures were assessed for comparison.
Performance Results for Test 4
Table 4: Comparison of Test 4: 2 Equipment, 2 Sensors, 2s
Acquisition Interval.
Metric
Sequential
Solution
Proposed
Solution
CPU Usage Max (%) 98.50 99.00
CPU Usage Avg (%) 12.74 10.48
CPU Usage Min (%) 1.50 2.00
RAM Usage Max (%) 32.30 32.90
RAM Usage Avg (%) 30.59 29.87
RAM Usage Min (%) 18.80 17.80
Jitter Equipment 1 (s) 0.2021 0.1892
Jitter Equipment 2 (s) 0.1530 0.1476
The results indicate that both architectures deliver
similar jitter performance, with the proposed solution
slightly outperforming the sequential system, as per
the baseline scenarios. This improvement is likely
due to the parallelization employed in the new ar-
chitecture, contrasting with the serialized approach of
the sequential implementation. RAM usage remains
comparable, and small differences are attributed to
background system processes and runtime variability.
Results for Tests 5 and 6
These tests confirm that both solutions scale effec-
tively with increased data acquisition frequencies in
low-complexity scenarios. CPU usage increases pro-
portionally, as expected, while RAM usage remains
stable across both implementations. The jitter re-
mains within acceptable limits, with the proposed ar-
chitecture again achieving slightly better performance
due to its parallel execution model.
Conclusions About Tests 4-6
Two primary conclusions can be drawn from these
tests:
• Both the sequential and proposed architectures
demonstrate similar performance in terms of av-
erage CPU and RAM usage, with consistent peak
activity.
• The proposed architecture offers a significant re-
duction in startup time for data acquisition, ap-
proximately 45 seconds faster, achieving im-
proved responsiveness without compromising re-
source efficiency.
These results validate the capability of both sys-
tems to handle low-complexity data acquisition sce-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
464

narios effectively. However, the proposed architec-
ture presents clear advantages in startup latency and
jitter optimization, thereby laying the groundwork for
superior scalability in more complex environments.
Test 7: Baseline High Complexity Configuration
In this test, both the previous and proposed architec-
tures were evaluated under the same configuration.
The proposed architecture demonstrated reliable per-
formance, successfully collecting and displaying data
from all 30 sensors with minimal network latency. In
contrast, the sequential solution encountered signifi-
cant limitations. Due to the absence of a handshake
mechanism between the OPC-UA server and the Lab-
VIEW interface, the system lacked the ability to op-
timize server setup. This resulted in system failure
during initialization, a previously mentioned limita-
tion where the solution could not handle more than
20 sensors.
Resource usage data for the proposed solution dur-
ing Test 7 is summarized below:
Table 5: Performance Metrics for Test 7.
Metric Value
CPU Usage Max (%) 100.00
CPU Usage Avg (%) 12.79
CPU Usage Min (%) 0.00
RAM Usage Max (%) 45.30
RAM Usage Avg (%) 42.87
RAM Usage Min (%) 20.70
Jitter analysis was also performed, with average
jitter values recorded as follows:
• Equipment 1: 0.071164 seconds
• Equipment 2: 0.094439 seconds
• Equipment 3: 0.082088 seconds
These results show that, although the resource
consumption was higher than in prior tests, the sys-
tem operated within acceptable thresholds. Jitter re-
mained stable, suggesting the network was not over-
loaded despite the increased sensor count.
Tests 8 and 9: Increased Acquisition Frequency
Tests 8 and 9 involved gradually increasing the data
acquisition frequency. At a 1-second interval, the
system remained stable and efficient, showing only
marginal increases in CPU, RAM usage, and decrease
in jitter. However, when the acquisition frequency
was increased to 0.5 seconds, the system encountered
a critical issue after approximately 7 minutes. Data
loss occurred due to Modbus server disconnections,
triggered by the excessive number of requests. The
LabVIEW logs confirmed that the Modbus program
could not handle the volume of concurrent threads,
which points to a potential bottleneck in the Lab-
VIEW Modbus layer rather than the overall system
architecture.
Conclusions About Test 7-9
After the conclusion of these tests the following con-
clusions were made:
• The previous solution is fundamentally limited to
handling up to 20 sensors.
• The proposed solution scales effectively to 30 sen-
sors with minor trade-offs in RAM and CPU us-
age.
• At acquisition frequencies below 1 second, the
Modbus Labview implementation becomes a lim-
iting factor, requiring optimization.
4.3 Stress Testing: Test 10
Test 10 was designed to push the architecture to its op-
erational limits. The test utilized a configuration file
specifying 60 sensors across 6 different equipment
modules, with a 2-second acquisition rate, doubling
the complexity of the previously mentioned tests.
Testbed Configuration and Results in the
Raspberry Pi 5
Since the IDEPA factory floor didn’t have 60 sensors
sending data to the Modbus Bus, the system was em-
ulated using three Raspberry Pi 4 units and one Rasp-
berry Pi 5. These devices hosted the Modbus servers
and clients, and a custom XML configuration was de-
ployed. The first deployment was carried out on a
Raspberry Pi 5, a more modern computing platform
than the CompactRIO, albeit not optimized for indus-
trial control. Despite this, the solution worked flaw-
lessly, with no interruption in data collection. CPU
and RAM usage were comparable to the CompactRIO
in absolute terms, but slightly lower in percentage due
to the more capable hardware. Attempts to scale be-
yond 60 sensors failed due to thread allocation limi-
tations, which was expected based on earlier architec-
tural analysis.
Test Results on CompactRIO
The second phase of Test 10 involved re-deploying
the architecture to the CompactRIO testbed present
in FEUP. This environment closely simulates the ac-
tual IDEPA factory floor. The results on the compact
Improving Industrial Interoperability and Scalability Through OPC-UA and Smart Object-Based Architectures
465

Rio were more successful, the system was capable of
capturing 85 sensors without any issues, in contrast
with the previously mentioned 60 on the Raspberry
Pi 5. This is the case because the CompactRio is built
for industrial setups and data processing, which the
Raspberry is not. Attempts to move to the 86th sensor
proved unsuccessful.
Conclusion About Test 10
The stress test confirmed the resilience and adaptabil-
ity of the proposed architecture. The main conclu-
sions are:
• The new system can manage 60 sensors across
multiple devices under moderate acquisition fre-
quency.
• It can operate reliably on both industrial-grade
and consumer-grade hardware.
• Thread allocation and Modbus handling are the
primary bottlenecks for further scalability, espe-
cially under high-frequency conditions.
4.4 Conclusion on Tests 1.1, 4.1 and 7.1
The results obtained from Test 4.1 confirmed the ex-
pected behavior: the system, configured with 4 sen-
sors and a single equipment unit, performed equiv-
alently to its distributed architecture counterpart. A
similar outcome was observed in Test 7.1, further
validating the solution’s consistency across different
configurations.
These results reinforce the conclusion that the pro-
posed architecture is both scalable and robust. It
demonstrates that the system can reliably perform its
intended functions without requiring changes to the
existing factory layout, thus supporting seamless de-
ployment in varied industrial setups.
5 CRITICAL ANALYSIS
This section presents and interprets the key findings
obtained through the comprehensive testing and eval-
uation of the proposed monitoring system. The results
are analyzed from an industrial deployment perspec-
tive, with a particular focus on scalability, operational
stability, system efficiency, and user experience. Em-
phasis is placed on the system’s practical readiness
for deployment in real-world manufacturing environ-
ments, such as the IDEPA factory floor.
5.1 Performance Evaluation
Testing confirmed that the proposed system offers sig-
nificant enhancements over the baseline implementa-
tion, particularly in terms of scalability, fault isola-
tion, and user operability, key requirements for mod-
ern industrial control systems.
A core architectural change was the transition
from a sequential to a multithreaded design. Contrary
to initial expectations, the multithreaded implementa-
tion did not incur excessive computational overhead.
The sequential system, operating sequentially, polled
sensors linearly, resulting in a single point of fail-
ure—where one unresponsive sensor could stall the
entire acquisition process. The newly implemented
parallel architecture isolates such failures, ensuring
uninterrupted data flow from remaining sensors, thus
improving system reliability and robustness.
Tests, as detailed in the previous section, were
conducted under varying loads, acquisition rates,
and sensor configurations using the CompactRIO
9040 hardware—the same controller deployed on the
IDEPA factory floor. These scenarios simulated con-
ditions commonly found in medium-sized industrial
environments. Performance metrics revealed that
both the sequential and new architectures exhibited
comparable CPU and memory footprints under most
operating conditions. However, the new architecture
significantly reduced acquisition jitter, thereby en-
hancing temporal precision and consistency of data
streams.
These results indicate that the proposed solution is
well-suited for deployment across industrial sites sim-
ilar in scope to IDEPA, especially where distributed
equipment layouts and real-time reliability are criti-
cal.
5.2 Scalability and Limitations
The system demonstrated reliable scalability in con-
trolled test environments, consistently supporting up
to 85 sensors during stress tests. This capability ex-
ceeds the sensor handling capacity of the previous so-
lution and positions the architecture for broader in-
dustrial applicability.
However, limitations emerged when scaling be-
yond this threshold. During system initialization with
over 85 sensors configured via the XML interface,
startup failures were observed. These issues were
traced to the excessive number of threads created,
which exceeded system resource limits. This behav-
ior highlights a practical ceiling on vertical scalability
when using the current threading model.
Additionally, during high-frequency acquisition
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
466

scenarios (0.5-second intervals) with 30 sensors,
data loss occurred after sustained operation (approx-
imately seven minutes). This suggests a throughput
ceiling beyond which the system cannot guarantee
consistent data integrity, signaling the need for further
optimization in high-load environments.
5.3 System Evaluation: Strengths and
Weaknesses
The proposed system architecture exhibits several no-
table strengths. One of its key advantages lies in its
fault isolation capabilities. By employing a multi-
threaded design, the system ensures that individual
sensor failures are contained within their respective
execution threads, thereby preventing fault propaga-
tion and maintaining operational continuity—an es-
sential requirement in real-time industrial monitoring
environments.
Another significant strength is the robust ini-
tialization mechanism achieved through a dedicated
handshake protocol between LabVIEW and the OPC
UA server. This protocol guarantees an orderly and
deterministic startup process, minimizing the likeli-
hood of boot-time errors and enhancing system relia-
bility.
Furthermore, the integration of a centralized con-
figuration management solution via the Backoffice
module contributes to streamlined deployment and
maintenance. Configuration data stored in XML for-
mat enables consistent system setup across multiple
factory installations, supporting scalability and ease
of maintenance.
The system also supports real-time monitoring by
interfacing with the OPC UA Prosys client. This inte-
gration provides immediate visualization and live sta-
tus updates, which are vital for plant-floor diagnos-
tics, control, and decision-making processes.
Despite these advantages, the system also presents
certain limitations. The reliance on legacy hardware
and software components introduces concerns regard-
ing long-term maintainability and may pose chal-
lenges to future upgrades or performance optimiza-
tion. Additionally, while the multithreaded architec-
ture improves fault tolerance, it also increases com-
putational overhead. This added processing load, al-
though acceptable under current operating conditions,
may limit the system’s deployability on resource-
constrained hardware platforms.
Overall, the system demonstrates a balanced de-
sign that favors reliability, configurability, and real-
time monitoring, albeit with trade-offs in terms of
hardware compatibility and computational efficiency.
6 CONCLUSIONS AND FUTURE
WORK
This work demonstrates the value of reengineering
legacy industrial systems to meet the demands of In-
dustry 4.0. By modernizing middleware, communi-
cation layers, and user interfaces, the proposed solu-
tion improves scalability, robustness, and operational
transparency. The integration of key principles dis-
cussed in this paper is critical for realizing Industry
4.0 objectives, enabling improved operational visi-
bility, reduced downtime, and data-driven decision-
making.
The system modernized at IDEPA enhances scal-
ability, usability, and synchronization through sev-
eral key improvements. Notably, the introduction
of a middleware layer resolves startup race condi-
tions and improves component synchronization. In
parallel, a modular Modbus acquisition approach en-
ables parallel polling and fault tolerance. While
OPC-UA remains the core protocol for standardized
data modeling, its limitations under high sensor loads
led to the exploration of a complementary Message
Queuing Telemetry Transport (MQTT) based archi-
tecture. Although full MQTT integration was beyond
the project’s scope, its advantages in decoupled, scal-
able messaging were validated and recognized for fu-
ture use.
The redesigned GUI significantly enhances user
interaction by improving error messaging, operational
transparency, and control intuitiveness, thereby em-
powering operators during maintenance and diagnos-
tics.
The system’s modular design ensures long-term
adaptability and positions it for future integration with
open standards and modern protocols. This platform
contributes directly to IDEPA’s digital transformation
goals and offers a scalable reference model for sim-
ilar industrial deployments. Continued evolution in
this direction aligns with the RAMI 4.0 architecture
and the broader Industry 4.0 vision.
Future work will focus on modernizing the sys-
tem architecture to enhance performance, flexibility,
and maintainability. A key objective is the migra-
tion from the current CompactRIO 9040 platform to
a contemporary industrial controller that offers su-
perior processing capabilities and broader hardware
openness. In parallel, the communication infrastruc-
ture will be restructured around the MQTT protocol
to facilitate improved scalability and reduce the over-
all architectural complexity. Furthermore, the exist-
ing LabVIEW-based data acquisition layer is intended
to be replaced with an open-source framework—such
as Python, Java, or C++ to eliminate licensing depen-
Improving Industrial Interoperability and Scalability Through OPC-UA and Smart Object-Based Architectures
467

dencies and increase development agility. Finally, the
software stack will undergo significant refactoring to
eliminate legacy XML-based logic, thereby stream-
lining data management and better supporting con-
tainerized deployment approaches aligned with mod-
ern development practices.
ACKNOWLEDGMENT
This work has been supported by the European Union
under the Next Generation EU, through a grant of
the Portuguese Republic’s Recovery and Resilience
Plan (RRP) Partnership Agreement, within the scope
of the project PRODUTECH R3 – “Agenda Mo-
bilizadora da Fileira das Tecnologias de Produc¸
˜
ao
para a Reindustrializac¸
˜
ao”, Total project investment:
166.988.013,71 Euros; Total Grant: 97.111.730,27
Euros. The authors acknowledge Fundac¸
˜
ao para a
Ci
ˆ
encia e a Tecnologia (FCT) for its financial sup-
port via the project UIDB/50022/2020 (LAETA Base
Funding)
REFERENCES
Bauer, W., Schlund, S., Hornung, T., and Schuler, S. (2018).
Digitalization of industrial value chains-a review and
evaluation of existing use cases of industry 4.0 in
germany logforum digitalization of industrial value
chains-a review and evaluation of existing use cases
of industry 4.0 in germany. LogForum, 14:331–340.
Boyes, H., Hallaq, B., Cunningham, J., and Watson, T.
(2018). The industrial internet of things (iiot): An
analysis framework. Computers in Industry, 101:1–
12.
Danys, L., Zolotova, I., Romero, D., Papcun, P., Kajati, E.,
Jaros, R., Koudelka, P., Koziorek, J., and Martinek,
R. (2022). Visible light communication and localiza-
tion: A study on tracking solutions for industry 4.0
and the operator 4.0. Journal of Manufacturing Sys-
tems, 64:535–545.
Demartini, M., Pinna, C., Tonelli, F., Terzi, S., Sansone,
C., and Testa, C. (2018). Food industry digitalization:
from challenges and trends to opportunities and solu-
tions. volume 51, pages 1371–1378. Elsevier B.V.
Morgan, J., Halton, M., Qiao, Y., and Breslin, J. G. (2021).
Industry 4.0 smart reconfigurable manufacturing ma-
chines.
Neto, L., Gonc¸alves, G., Torres, P., and Dion
´
ısio, R. (2020).
On the development of a component model for the re-
alization of industry 4.0. In 2020 IEEE Conference on
Industrial Cyberphysical Systems (ICPS), volume 1,
pages 481–486.
Neto, L., Torres, P., Dionisio, R., Malh
˜
ao, S., and
Gonc¸alves, G. (2019). An industry 4.0 self descrip-
tion information model for software components con-
tained in the administration shell.
Pisching, M. A., Pessoa, M. A., Junqueira, F., dos San-
tos Filho, D. J., and Miyagi, P. E. (2018). An architec-
ture based on rami 4.0 to discover equipment to pro-
cess operations required by products. Computers and
Industrial Engineering, 125:574–591.
Torres, P., Dion
´
ısio, R., Malh
˜
ao, S., Neto, L., and
Gonc¸alves, G. (2022). Machinery retrofiting for in-
dustry 4.0. Lecture Notes in Mechanical Engineering,
pages 213–220.
Zhang, T. and Li, N. (2023). Measuring digital economy:
From the perspective of digital industrialization and
industry digitalization. In Procedia Computer Sci-
ence, volume 221, pages 1006–1012. Elsevier B.V.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
468
