
Adaptive Fog Computing Architecture Based on IoT Device Mobility
and Location Awareness
Narek Naltakyan
Institute of Information and Telecommunication Technologies and Electronics,
National Polytechnic University of Armenia, Armenia
Keywords: Fog Computing, IoT Mobility, Location Awareness, Adaptive Architecture, Dynamic Orchestration,
Edge Computing.
Abstract: In the modern world, we are increasingly seeing the involvement of IoT devices in our daily lives, whether in
the form of sensors, smart homes, smart cars, or several other devices and equipment. Fog computing is a
concept that is intended to stimulate the development of such systems. However, a problem arises when the
operation of a given device or equipment depends on the location. This paper considers a new adaptive fog
computing architecture that dynamically manages IoT device mobility through intelligent location awareness
and geographic area orchestration. In the proposed system, devices are divided into two parts according to
location: static and dynamic, which allows optimizing resource allocation and service approach. The
architecture features include dynamic geographic area division, adaptive scaling of fog nodes, and the use of
a smart location service that can work both in the cloud and in the fog, depending on the number and density
of user requests. The system automatically scales infrastructure based on real-time demand and the geographic
distribution of devices, while maintaining quality of service.
1 INTRODUCTION
With the rapid development of technology, IoT
devices have become widespread in areas such as
smart homes and cities, autonomous vehicles,
factories, and health monitoring systems. Current
forecasts indicate that by the end of 2025, 75 billion
IoT devices will be connected, creating an
unprecedented volume of data that requires real-time
processing and context-aware responses. Traditional
cloud-centric architectures face serious challenges in
supporting this scale of distributed, mobile, and
latency-sensitive applications. Fog computing as a
paradigm was created to address these challenges by
bringing computing resources closer to data sources
and end-users. However, existing implementation
schemes assume network topologies and static device
locations, failing to adapt to the dynamic nature of
modern IoT device deployments, where device
locations are variable and cannot be considered
constant, changes in network conditions, and, in
addition, differences in service requirements over
time and geography.
1.1 Problem Statement
When using fog computing architectures, we face
several important issues when it comes to mobile IoT
devices:
Static Resource Allocation: Existing systems
pre-allocate resources based on patterns, rather
than dynamically adapting to the geographic
location of devices and changes in their
location.
Location Agnostic Service Management: In
existing architectural approaches, all devices
are considered static in terms of location, i.e.,
they do not change location over time.
Limited Scalability Mechanisms: Another
issue is the lack of mechanisms for dynamically
scaling the infrastructure based on real-time
demands and geographic service distribution.
Inefficient Mobile Device Handling: In
existing systems, there is no separate
distinction between static and dynamic IoT
devices in terms of location, which leads to
additional costs and insufficient support for
high mobility applications.
500
Naltakyan, N.
Adaptive Fog Computing Architecture Based on IoT Device Mobility and Location Awareness.
DOI: 10.5220/0013783900004000
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 17th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2025) - Volume 2: KEOD and KMIS, pages
500-505
ISBN: 978-989-758-769-6; ISSN: 2184-3228
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
1.2 Research Objectives
This research aims to develop an adaptive fog
computing architecture with the following primary
objectives:
Design an intelligent location-aware fog
orchestration system that dynamically manages
fog nodes based on real-time device
distribution and demand patterns.
Implement different strategies depending on
the type of IoT device deployment or location,
which will allow you to optimize resource
utilization while maintaining service quality
across diverse mobility scenarios.
Implement infrastructure scaling mechanisms,
which should be adaptive and adjust the
geographic coverage of fog nodes based on the
number of requests and the required resources.
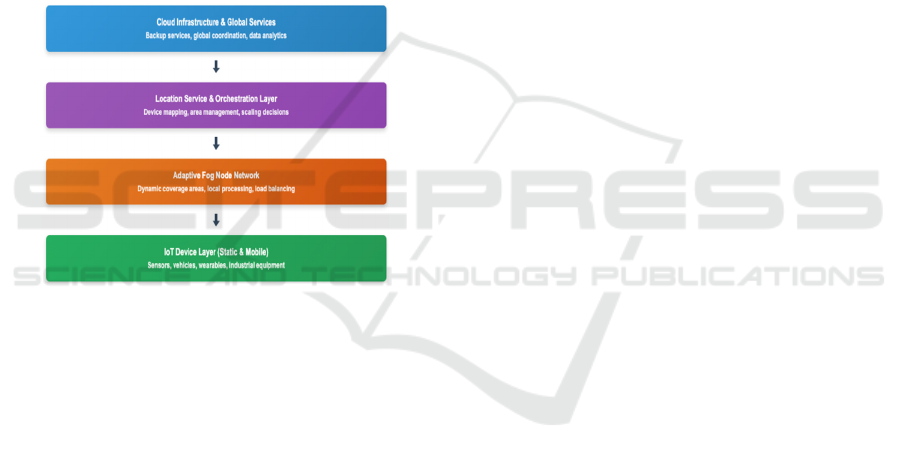
Figure 1: Hierarchical Adaptive Fog Computing
Architecture.
Cloud Layer: Provides global coordination
and backup services.
Location Service: Intelligent orchestration and
device mapping.
Fog Layer: Distributed processing nodes with
adaptive coverage.
IoT Layer: Heterogeneous devices with
varying mobility patterns.
1.3 Key Contributions
This scientific paper includes several significant
contributions to fog computing research and practice:
Novel Architectural Framework: The
architectural model discussed in this article is a
hierarchical location-aware fog computing
architecture that intelligently orchestrates resources
based on IoT device mobility patterns and geographic
services distribution.
Dynamic Area Management Algorithm: We have
developed an algorithm that adaptively changes the
geographical area under the responsibility of a fog
node based on real-time requirements. In this
architecture, 3 algorithms for distributing
responsibilities are proposed:
1. Using a load balancer and dividing requests
into two or more nodes.
2. Increasing the scope of responsibility if the
number of requests is less than X.
3. Adding a new fog node and dividing the
geographical area under the responsibility of
the nodes if the count of requests is greater
than X.
Differentiated Mobility Services: A service
differentiation strategy has been developed, where the
key argument is the type of IoT device location - static
or dynamic - that optimizes the system performance,
taking into account the specific requirements of the
devices.
Comprehensive Performance Validation: Results
of extensive tests are provided, which show a
significant performance improvement over existing
static fog computing approaches across multiple
evaluation metrics and deployment scenarios.
2 RELATED WORKS
2.1 Fog Computing Fundamentals
Fog computing builds on cloud computing by moving
it to the network's edge. This enables distributed
computing, meaning that data processing, storage,
and network services are performed closer to IoT
devices and end users, rather than just on centralized
cloud servers. Bonomi and his colleagues were the
first to introduce the idea of fog computing as an
approach aimed at solving common problems
associated with cloud systems: latency, network
bandwidth, and reliability. The OpenFog Consortium,
now part of the Industrial Internet Consortium, has
created standardized models that describe fog
computing as a system architecture that is distributed
across multiple layers of cloud, fog computing, and
IoT devices.
Recent progress in fog technologies has
emphasized optimizing how resources are used,
service deployment, and combining with new
technologies such as 5G networks and artificial
intelligence. However, much of the current research
is based on stable and immobile networks and doesn’t
Adaptive Fog Computing Architecture Based on IoT Device Mobility and Location Awareness
501

address the changing challenges posed by mobile IoT
devices.
2.2 Mobility-Aware Fog Computing
Limited research has addressed mobility
considerations in fog computing architectures.
Qayyum et al. proposed a mobility-aware hierarchical
fog framework for Industrial IoT that considers
device mobility in fog node placement decisions.
Their work focuses primarily on industrial
environments with predictable mobility patterns
rather than general-purpose mobile IoT scenarios.
Mahmud et al. developed a mobility-aware fog
computing framework that uses prediction algorithms
to anticipate device movement and proactively
allocate resources. While this approach shows
promise, it lacks comprehensive geographic area
management and does not address dynamic
infrastructure scaling based on mobility patterns.
Singh et al. conducted a comprehensive survey of
mobility-aware fog computing in dynamic networks,
identifying key challenges including mobile node
utilization, service continuity, and resource
optimization. Their analysis reveals significant gaps
in current approaches, particularly in adaptive
infrastructure management and location-aware
service orchestration.
2.3 Location-Aware Computing
Systems
In the world of information technology, location
awareness has been widely studied in the context of
mobile computing, from purely context-aware
applications to location-based services. But while
traditional location-aware systems rely on the
location of individual devices, they do not focus on
the systematic geographic optimization of distributed
resources.
Kalaria et al. have developed adaptive context-
aware access control systems that use location
information to make security decisions in IoT
environments. However, even in this case, there is no
consideration of resource management or dynamic
infrastructure scaling, which can be problematic
when there are a large number of users and/or data
flows.
The concept of Location-Aware Phase Frames,
studied by Ahmad et al., proposed a lightweight
Location-Aware Phase Frame (LAFF) for QoS
optimization. However, the work focuses on the
selection of phase nodes based on the user location,
but lacks dynamic area management and adaptive
scaling mechanisms.
2.4 Dynamic Resource Discovery vs.
Adaptive Geographic
Orchestration
There are significant differences between our
proposed architecture and existing dynamic resource
discovery (DRD) approaches in the field of fog
computing. Although both address resource
management challenges, they operate at
fundamentally different architectural levels and
address different problem domains.
Dynamic Resource Discovery Scope: Existing DRD
research focuses on runtime discovery and allocation
of computational resources within fixed
infrastructure topologies. Xu et al. developed DRAM
for load balancing through "static resource allocation
and dynamic service migration" to existing fog nodes.
Similarly, FogBus2 implements dynamic resource
discovery mechanisms to assist new entities in joining
established fog systems. These approaches work
reactively within predetermined infrastructure
boundaries.
Architectural Variation: Our research addresses
fundamental, broader problem areas. Our proposed
architecture addresses “How should I optimally
organize the geographical coverage” and “When
should I expand or contract the service areas”, while
DRD answers “Which fog nodes are available” and
“How should I distribute the load among the available
nodes”.
Complementary Technologies: Our proposed
architecture and DRD extensions can be used together
to enable DRD to identify existing fog nodes, while
our architecture can use dynamic resource discovery
as a component technology within a broader
geographic orchestration framework. Our location
service can use DRD mechanisms to identify existing
fog nodes, while our area management algorithms
determine optimal geographic boundaries and scaling
decisions.
Novel Geographic Intelligence: Our research
introduces geographic area management as a primary
optimization dimension, which existing DRD
approaches do not address. Current resource
discovery focuses on computational resource
allocation without considering the spatial
organization of fog infrastructure or the geographic
optimization of service coverage areas.
KMIS 2025 - 17th International Conference on Knowledge Management and Information Systems
502
3 SYSTEM ARCHITECTURE
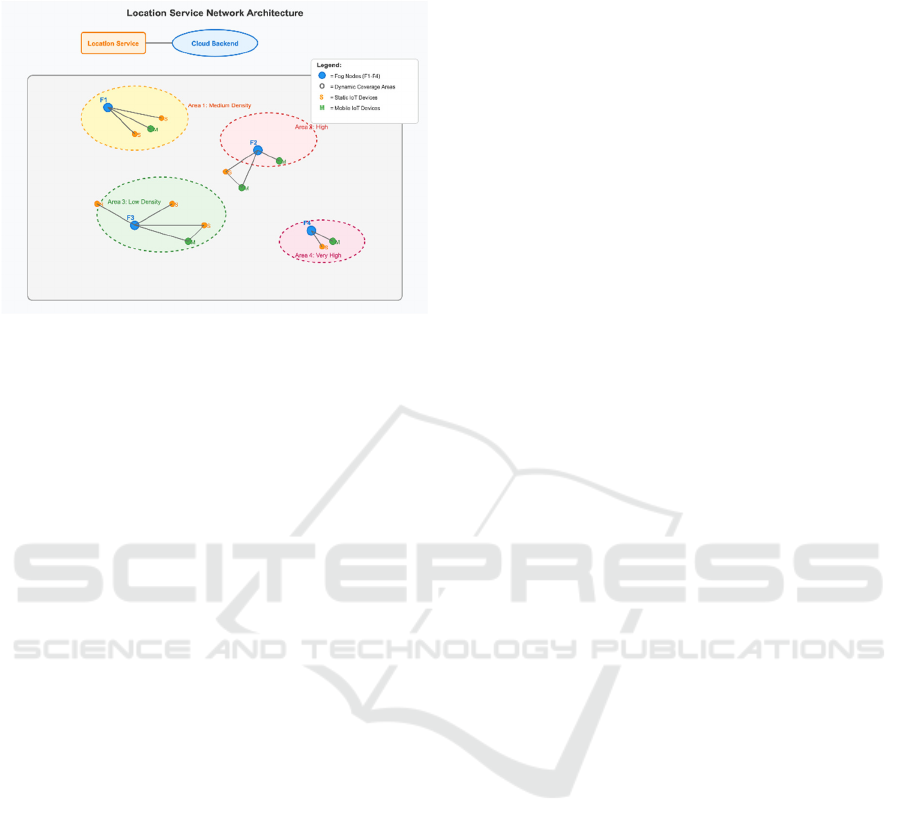
Figure 2: Dynamic Geographic Area Coverage with Fog
Nodes and IoT Devices.
Key Features:
• F1: Medium density area with balanced
static/mobile devices.
• F2: High-density area with contracted
coverage for efficiency.
• F3: Low-density area with extended
coverage for broad service.
• F4: Very high-density area with minimal
coverage, ready for scaling.
3.1 Architectural Overview
Our adaptive fog computing architecture implements
a three-tier system: IoT devices<=>fog
infrastructure<=>cloud resources. An orchestration is
performed through an intelligent location service that
provides load balancing, area assignment among fog
nodes, and dynamic resource management.
The main innovation of the architecture is the
dynamic allocation of responsibility areas across
geographic areas to fog nodes based on real-time
device distribution, demand patterns, and
infrastructure capacity. This enables a fog
environment that adapts to real-time requirements
while maintaining quality of service guarantees
across different IoT deployment scenarios.
Key Architectural Components:
1. Location Service Layer: Provides
centralized intelligence for device-to-fog
mapping, geographic area management, and
infrastructure scaling decisions
2. Fog Orchestration Layer: Manages
distributed fog nodes, handles service
placement, and coordinates resource
allocation across geographic areas
3. Device Management Layer: Implements
differentiated services for static and
dynamic IoT devices with optimized
communication protocols
4. Adaptive Scaling Controller: Monitors
system performance and triggers
infrastructure scaling events based on
demand patterns and service quality metrics
3.2 Location Service Architecture
The location service is the cornerstone of the above
architecture, enabling intelligent zoning and rezoning
over time. This service provides communication
between IoT devices and the fog infrastructure,
informing IoT devices over time whether their
responsible fog node has changed or not, while
continuously optimizing the zoning.
Adaptive Service Deployment: The location service
itself applies an adaptive deployment strategy based
on the number and density of requests. It is initially
deployed in the cloud and runs from the cloud for
low-density deployments, but migrates to distributed
fog nodes as requests grow.
Geolocation Management: The service maintains
real-time state information, including device
locations, fog node capabilities, current area
boundaries, and historical demand patterns. This
enables decisions to be made for area adjustments and
scaling events.
Query Optimization: For dynamic devices that
require frequent location updates, the service includes
a query optimization algorithm that attempts to
perform predictive caching based on historical data,
direction, and speed of movement.
3.3 Location Service Architecture
The dynamic area management system represents a
novel contribution that enables fog nodes to
automatically adjust their geographic coverage areas
based on real-time demand characteristics and service
quality requirements.
Area Sizing Algorithm: The coverage area of each
fog node is dynamically scaled. When there are few
requests, it is expanded to a specified maximum size
that is allowed for that fog node, and is reduced when
the number of requests exceeds the specified size.
This algorithm balances the load on the fog nodes and
optimizes resource utilization.
Adaptive Fog Computing Architecture Based on IoT Device Mobility and Location Awareness
503
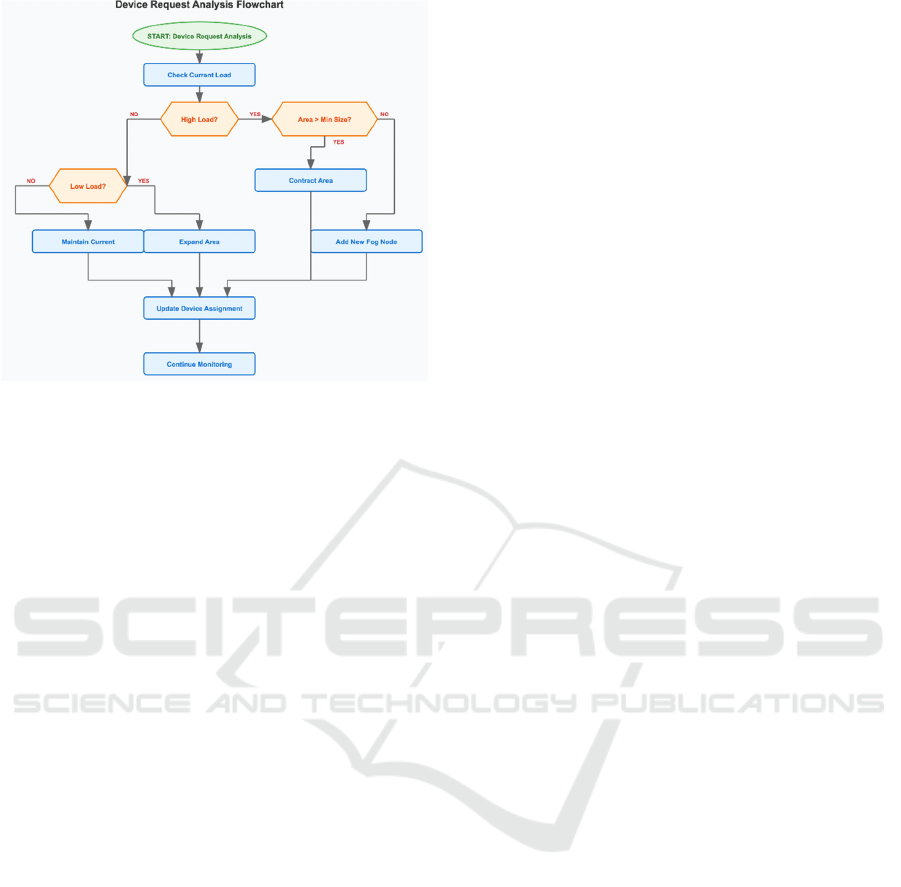
Figure 3: Area Adaptation Algorithm Flow.
Minimum Area Constraints: The system has a
minimum area size constraint, when the area of
responsibility of a given fog node shrinks to a defined
minimum, but the number of requests does not
decrease, then another fog node and load balancer are
added, added, and both fog nodes are responsible for
the given area.
Border Coordination: Neighboring fog nodes
coordinate area boundary adjustments to avoid gaps
in coverage and service continuity
3.4 Differentiated Device Management
The architecture is based on device classification and
management strategies that allow optimizing system
performance by segmenting devices according to
location characteristics.
Static Device Protocol: Devices that do not change
their location during operation will be called static in
our architecture, such as sensors, fixed infrastructure,
and permanent installations.
Dynamic Device Protocol: Devices that change their
location during operation will be called dynamic in
this architecture. These are: vehicles, wearable
devices, portable sensors. I also find it noteworthy to
note that the frequency of requests increases
depending on the speed of the device's movement,
since the device needs to "know" which node is
responsible for a given area.
Predictive Assignment: For devices with predictable
paths, such as public transit, delivery vehicles,
commuters, the system uses predictive fog node
assignment to minimize handover delay and improve
service continuity.
4 DYNAMIC ORCHESTRATION
ALGORITHMS
4.1 Geographic Area Optimization
Algorithm
The geographic area optimization algorithm
continuously modifies the coverage areas of fog
nodes to balance quality of service, efficient resource
use, and infrastructure efficiency. It operates in real
time based on metrics such as request rate, response
latency, and fog node load levels.
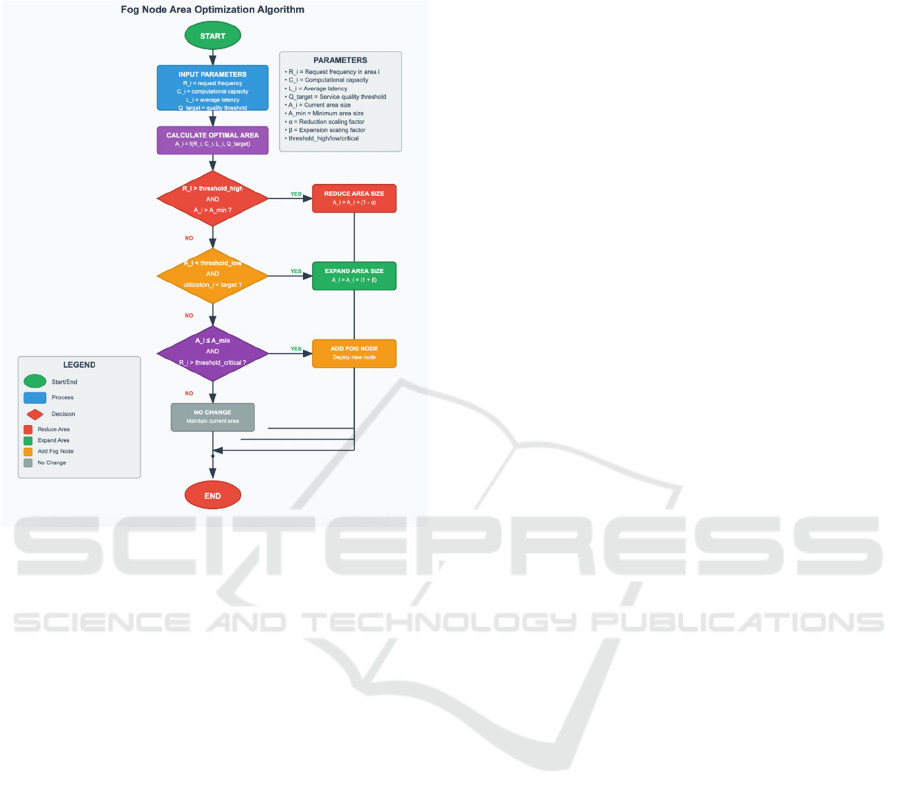
Mathematical Formulation:
For each fog node i, the optimal area size A_i is
determined by:
A_i = f(R_i, C_i, L_i, Q_target)
Where:
• R_i = request frequency in area i
• C_i = computational capacity of fog node i
• L_i = average latency from area boundary to
fog node i
• Q_target = target service quality threshold
Area Adjustment Decision Logic:
IF (R_i > threshold_high AND A_i > A_min):
REDUCE area size by scaling factor α
ELIF (R_i < threshold_low AND utilization_i
< utilization_target):
EXPAND area size by scaling factor β
ELIF (A_i ≤ A_min AND R_i >
threshold_critical):
TRIGGER fog node addition
4.2 Location Service Placement
Algorithm
The location service placement algorithm selects
where to deploy location service components based
on client distribution, request patterns, and network
topology characteristics.
Cloud vs. Fog Placement Decision:
IF (client_density < threshold_fog AND
query_frequency < threshold_freq):
DEPLOY location service in cloud
ELSE:
KMIS 2025 - 17th International Conference on Knowledge Management and Information Systems
504
DEPLOY location service in fog
infrastructure IMPLEMENT regional
service distribution
Figure 4: Area optimization algorithm.
4.3 Device Assignment Optimization
Static Device Assignment:
fog_node = SELECT fog_node_i WHERE:
device_location ∈ coverage_area_i AND
capacity_available_i > service_requirements
AND latency(device, fog_node_i) <
latency_threshold
Dynamic Device Assignment:
fog_node = SELECT fog_node_i WHERE:
predicted_location ∈ coverage_area_i AND
handoff_probability < handoff_threshold
AND service_continuity_score >
continuity_threshold
REFERENCES
Ahmad, N., Hussain, M., Riaz, N., Subhani, F., Haider, S.,
Alamri, K. S., & Alasmary, W. (2021). Enhancing SLA
compliance in Cloud computing through efficient
resource provisioning. Future Generation Computer
Systems, 118, 365-380.
Bonomi, F., Milito, R., Zhu, J., & Addepalli, S. (2012). Fog
computing and its role in the internet of things. In
Proceedings of the first edition of the MCC workshop
on Mobile cloud computing (pp. 13-16). ACM.
Kalaria, R., Gupta, A., Singh, R., & Sharma, P. (2020).
Adaptive context-aware access control framework for
IoT environments. IEEE Access, 8, 42462-42475.
Mahmud, R., Kotagiri, R., & Buyya, R. (2018). Fog
computing: A taxonomy, survey and future directions.
In Internet of everything (pp. 103-130). Springer.
Qayyum, T., Malik, A. W., Khattak, M. A. K., Khalid, O.,
& Khan, S. U. (2018). FogNetSim++: A toolkit for
modeling and simulation of distributed fog
environment. IEEE Access, 6, 63570-63583.
Singh, S., Sharma, P. K., Yoon, B., Shojafar, M., Cho, G.
H., & Ra, I. H. (2020). Convergence of blockchain and
artificial intelligence in IoT network for the sustainable
smart city. Sustainable Cities and Society, 63, 102364.
Xu, R., Wang, Y., Cheng, Y., Zhu, Y., Xie, Y., Sani, A. S.,
& Yuan, D. (2021). Improved particle swarm
optimization based workflow scheduling in cloud-fog
environment. In International Conference on Business
Process Management (pp. 337-347). Springer.
Adaptive Fog Computing Architecture Based on IoT Device Mobility and Location Awareness
505
