
Satellite Navigation Constellation Optimisation Problem Definition for
the Application of Genetic Algorithms
Paula Pi
˜
neiro Ramos
1 a
, Sebastian Bernhardt
1 b
, Helena Stegherr
2 c
and J
¨
org H
¨
ahner
2 d
1
DLR Galileo Competence Center, Oberpfaffenhofen, Germany
2
Universit
¨
at Augsburg, Augsburg, Germany
Keywords:
Constellation Optimisation, Evolutionary Algorithms, GNSS, LEO-PNT, Multi-Objective Optimisation,
Navigation, Problem Characterisation.
Abstract:
Global Navigation Satellite Systems (GNSS) are used on a daily basis, providing Positioning, Navigation and
Timing (PNT) services for various applications ranging from smartphones over the financial sector up to areas
such as aviation and space. Classical GNSS constellations positioned in Medium Earth Orbit (MEO) often
experience reduced performance in areas of low visibility like forests and cities. To rectify this, augmentation
constellations are deployed, improving the provided positioning accuracy. Recent proposals for augmentation
systems have often been based in Low Earth Orbit (LEO), which, for global coverage, require a large number
of satellites and are complex to design due to dependencies, coverage requirements and the large search space.
This makes the constellation design problem well-suited for applying Genetic Algorithms (GA) to find an
optimal solution. However, previous research has only addressed highly constrained versions of the problem.
This paper presents an approach for applying GAs to constellation designs with a large search space. In
particular, the focus is on the description of the multi-objective fitness function and the simulation necessary
for its evaluation, options for the solution encoding, and a discussion of algorithmic features applicable in this
scenario.
1 INTRODUCTION
Satellites have come a long way since the launch of
the first satellite, Sputnik, in 1957. In today’s world
satellites have become a backbone of modern civilisa-
tion and are used for military as well as civilian appli-
cations on a daily basis, spanning a wide range, e.g.
telecommunication, television, internet access, recon-
naissance, earth observation, deep space telescopes
and Position, Navigation and Timing (PNT).
The focus of this work are PNT constellations
and mostly augmentative constellations supporting
Global Navigation Satellite Systems (GNSS). Cur-
rently, there are four GNSS constellations: Global Po-
sitioning System (GPS - USA), Global’naya Navigat-
sionnaya Sputnikovaya Sistema (GLONASS - Rus-
sia), Baidou (China) and Galileo (Europa). These
systems are mostly positioned in Medium Earth Orbit
(MEO) at an altitude between 19000 km and 23000
a
https://orcid.org/0009-0003-4169-1805
b
https://orcid.org/0009-0002-7411-0870
c
https://orcid.org/0000-0001-7871-7309
d
https://orcid.org/0000-0003-0107-264X
km, the only exception to this being Baidou, as it in-
tegrates augmentation satellites in the system in addi-
tion to MEO at Low Earth Orbit (LEO), Geostation-
ary Earth Orbit (GEO) and Geo Synchronous Orbit
(GSO). These MEO constellations are stable in their
constellation design and improvements are more fo-
cused on the onboard technologies. However, in ad-
dition to these constellations there are augmentation
constellations which are more varying and adaptive
in their constellation design and therefore in constant
development. These constellations enhance GNSS
performance in specific regions, such as the Indian
system Navigation with Indian Constellation (NavIC)
and the Quasi Zenith Satellite System (QZSS) over
Japan. Besides these regional systems, there are also
plans for new global constellations in LEO, on gov-
ernmental side as well as from commercial compa-
nies. Constellations in LEO come with certain advan-
tages, for example satellites can use less expensive
components due to less radiation, the launch costs are
reduced due to the lower orbits (400-2000 km) and the
strength of the signal reaching Earth is a lot higher.
However, there are drawbacks as well, for global cov-
Ramos, P. P., Bernhardt, S., Stegherr, H. and Hähner, J.
Satellite Navigation Constellation Optimisation Problem Definition for the Application of Genetic Algorithms.
DOI: 10.5220/0013782000003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 329-339
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
329
erage the number of satellites needs to be higher than
for traditional GNSS constellations, also the satellites
need to correct their orbits more often due to atmo-
spheric drag at lower altitudes, causing them to have
a shorter lifetime than their MEO counterparts. (Li
et al., 2023)
These augmentative constellations are much more
suited for optimisation than classic GNSS constel-
lations, as either a specific region has to be im-
proved with a specific number of satellites or, on a
global scale for LEO, the same performance has to
be achieved with a minimal number of satellites. The
optimisation of constellations is important for multi-
ple reasons, while the primary objective for the end
user of a constellation would be improved perfor-
mance, for the operator it would be the reduction of
costs. Besides performance and costs another topic
that has become more important recently is sustain-
ability, one natural point is that a reduced number of
rocket launches will reduce the impact on the envi-
ronment. Furthermore satellites contain rare materials
and the long term effects of the residual materials of
them burning up in the atmosphere is currently barely
researched so until a better solution is found to retire
satellites it should be a goal to minimise their number.
In the following sections, the necessary back-
ground is provided to enable the understanding
of constellation design and performance indicators.
Then, an in-depth analysis of the optimisation prob-
lem is conducted before showing necessary prepara-
tions for the application of a Genetic Algorithm (GA).
2 BACKGROUND
Before describing the considerations necessary for the
application of GAs, the requirements and constella-
tion types for the optimisation approach are explained
in detail.
2.1 Need for Augmentation
There are some parameters that can be considered for
the optimisation of a constellation, but for navigation
constellations, the first parameter to look at is the Di-
lution of Precision (DOP) value of the constellation.
The quality of a positioning solution is in direct cor-
relation with the DOP value of the constellation, it ac-
counts for the user aspect with the receiver position,
as well as the system design based on the satellite ge-
ometry. DOP measures the combined impact of satel-
lite geometry on both 3D position and time accuracy,
while Position Dilution of Precision (PDOP) mea-
sures only the effect on 3D position accuracy. PDOP
is chosen because it isolates the spatial position qual-
ity, providing a clearer assessment of how satellite ge-
ometry affects positioning without mixing in timing
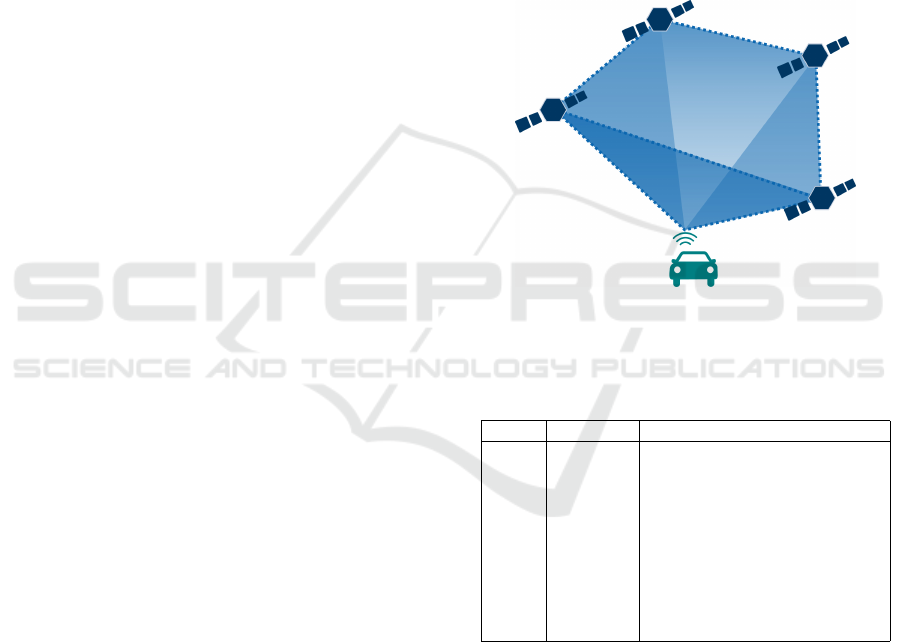
errors. The PDOP is based on the relationship be-
tween the locations of the satellites in Line of Sight
(LOS) to the receiver. Within these lines of sight, a
reversed squared pyramid can be built between four
satellites and the receiver , this is shown in Figure 1.
Depending on the volume of the resulting pyramid,
the PDOP will change, a larger volume leading to a
smaller PDOP and thereby to a better positioning so-
lution. DOP values can be categorised depending on
their usability for positioning applications as shown
in Table 1.
Figure 1: Visualisation of geometry for the PDOP between
receiver and satellites.
Table 1: DOP ratings and classification (Bernhardt et al.,
2024).
DOP Rating Classification
<1 Ideal High confidence for high preci-
sion
1-2 Excellent Appropriate for high precision
2-5 Good Minimum for accurate position-
ing
5-10 Moderate Minimum requirement for posi-
tioning
10-20 Fair Rough position estimation
>20 Poor Measurements should be dis-
carded
The global mean PDOP of Galileo is shown in
Figure 2. The data is analysed over one repeat orbit,
meaning that the ground tracks of the constellation
repeat themselves. For Galileo this happens every ten
days. This allows to make viable statements for the
behaviour of a constellation with a reduced data set.
The data in Figure 2 shows that the average PDOP
achieved by Galileo is around two, which is excellent
for positioning and, as most common receivers use
multi system GNSS, combining compatible systems
with each other, these values become even better.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
330

Figure 2: Visualisation of mean PDOP (values represented
by the colour bar) for Galileo. The stations were equally
distributed every 10° with a masking angle of 5°.
However, this only represents open field conditions
with no constraints to visibility and a large part of
navigation in daily life happens in cities and, with
this, in urban canyons. In urban canyons, the masking
angles, depending on building height and positioning
of the user, can be much higher, reaching up to 90°
and by this greatly reducing the satellites in LOS (Xu
et al., 2020). Additionally, as MEO satellites appear
to move relatively slowly from an observer’s perspec-
tive on Earth, the conditions in a given location often
remain consistent over a long period. With the reduc-
tion of visible satellites this can increase the DOP by
a large factor (More et al., 2022) or even prevent po-
sitioning when the number of visible satellites falls
below four. The introduction of augmentation con-
stellations is meant to increase the number of visible
satellites. In the case of GEO satellites, these are in
a relatively fixed position mostly at a very high angle
over the target region, while for LEO satellites, large
numbers combined with faster orbits lead to more fre-
quent changes in the geometry and a greater number
of visible satellites. Both approaches increase the per-
formance of GNSS in challenging environments.
Apart from the DOP, other optimisation objec-
tives that could be used for navigation constellations
or communication systems are, for example, visibil-
ity from a certain region for communication from a
ground station to a satellite, or the revisit time it takes
the satellite to come back to a certain location.
2.2 Constellation Types
Satellite constellation design is a complex problem,
as not only the individual orbits have to be chosen but
the different orbits have to be compatible as well. A
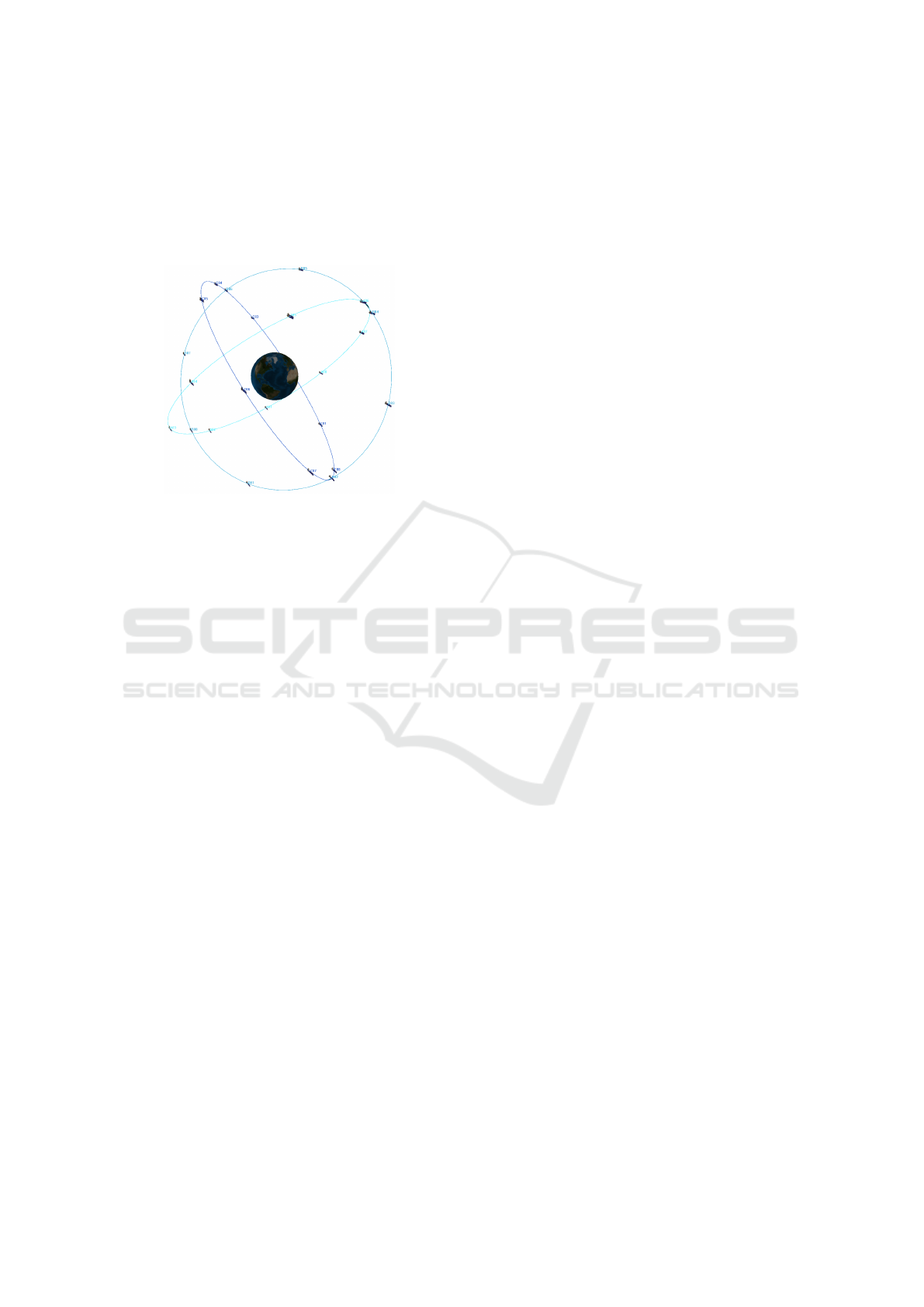
satellite’s orbit and its position on that orbit, is defined
through the six Keplerian elements (cf. Figure 3):
semi-major axis, half of the major axis of the ellipse,
orbit eccentricity, indicating the deviation from a cir-
cular orbit, inclination of the orbit with respect to the
equatorial plane, longitude of ascending node, spec-
ifying where the orbit passes through the reference
plane, argument of periapsis, defining the orientation
of the ellipse in the orbital plane and the true anomaly,
showing the current position of the satellite on the or-
bit.
Figure 3: Visualisation of Kepler Elements.
These elements offer an idealised representation
of the orbital plane of an object with respect to a refer-
ence plane and direction. Figure 3 describes an orbit
around an arbitrary body. Since the current satellite
constellations are focused on earth some further def-
initions can be made. The reference plane and direc-
tion are defined as the equatorial plane and the vernal
equinox respectively. Additionally, for earth centred
orbits the terms apogee and perigee are used, as well
as Right Ascension of the Ascending Node (RAAN)
for the longitude of ascending node.
Since the description of a satellite orbit requires
all elements of each individual satellite to be defined,
the number of variables quickly becomes impracti-
cal. To minimise the number of parameters required
to define a constellation, different design frameworks
have been developed to define relationships between
the satellites within a constellation. Some of the most
prominent constellation frameworks include Walker
(Delta/Star) constellations (Walker, 1970), Street-of-
Coverage (SOC) constellations (Beech and Dutruel-
Lecohier, 2013), and the newer Flower constella-
tions (Mortari et al., 2004).
J. G. Walker introduced two circular orbit constel-
lations in 1970, which set all orbital element apart
from the RAAN and true anomaly to the same value,
and have the orbital planes evenly distributed along
the equatorial line. The two constellation types dif-
fer in the plane distribution. The Walker Delta (cf.
Figure 4) has them distributed along the entire 360°,
while the Star pattern spreads them over 180°. In ad-
dition to the Keplerian elements of the first satellite,
three constellation structure parameters are needed to
Satellite Navigation Constellation Optimisation Problem Definition for the Application of Genetic Algorithms
331
define a Walker constellation: the total number of
satellites, the number of orbital planes and the phase-
shift between adjacent planes. The Walker framework
can be used to describe most constellations, such as
for example the Galileo constellation (Delta) and the
telecommunication constellation Iridium (Star).
Figure 4: Visualisation of Walker Delta orbits at MEO in an
Earth Centered Inertial view.
Streets of Coverage constellations are one of the
few asymmetric constellations, distribution the orbits
heterogeneously along the equatorial line. Adjacent
orbits and satellites in the same orbit are synchronised
to offer swaths of coverage. The width of the swath,
also called ’street’ has to be set, along with the orbital
elements of the first satellite. SOC constellations are
primarily used for communication.
The newer Flower constellations are designed to
have repeating ground tracks, meaning that after a
given time all satellites return to their initial posi-
tions. This property facilitates designing a constel-
lation for continuous coverage, since a complete con-
stellation analysis can be carried out in the time span
of one repetition (Nadoushan and Assadian, 2015).
To ensure repeating ground tracks, the framework sets
the orbital nodal period, the time needed for a satel-
lite to return to an orbital nodes, equal to the Green-
wich nodal period (24 hours). The Flower framework
creates very specific constellations and is therefore
mostly used for the derivation of more general rep-
resentations instead of directly in the design of a con-
stellation.
A derivation from the harmonic (symmetric) sub-
class of Flower constellation results in the Lattice
Flower frameworks, which seek to generalise mul-
tiple constellation types into one design framework.
The 2D Lattice theory combines Walker and Flower
constellations and requires the same parameters as the
Walker framework (Avenda
˜
no et al., 2013). Having
set the initial values for the longitude of ascending
node and the mean anomaly, the positions of all satel-
lites are defined by a two-dimensional system of equa-
tions. Expansion of the theory to higher dimensions
such as 3D and 4D is done to increase the degrees of
freedom of the design.
The 3D theory includes measures to counter the
effects of J
2
perturbations on the constellation orbits.
J
2
perturbation are the largest considered perturba-
tion effect caused by earths oblateness. These dis-
turbance in the gravity field create forces, affecting
satellite orbits and distorting them over time, espe-
cially non-circular orbits. Instead of planning main-
tenance manoeuvres to upkeep the repeating ground
track, counter measures are included in the constella-
tion design. In the 3D representation, a term is added
for varying arguments of perigee, which accounts for
the rotation caused by J
2
perturbations (Davis et al.,
2013). The argument of perigee rotation changes the
relative position of the satellites in one orbital plane to
those in another, jeopardising coverage criteria. The
constellation can now be described using six integer
and six continuous parameters. The 4D Lattice frame-
work introduces an additional variation of the semi-
major axis of each orbit (Arnas et al., 2021). Usually,
varying satellite altitudes are introduced through dif-
ferent constellation layers, instead of different planes.
However, for some regional coverage scenarios, this
representation could be of use.
3 RELATED WORK
Due to the relevance of the field, there have been
some past research efforts to develop an optimisation
method for satellite constellations (Choo et al., 2024).
Most literature focuses on the design of communica-
tion, navigation and earth observation constellations
with different types of coverage requirements: global,
regional or discontinuous regional coverage. Differ-
ent design approaches have been employed to iden-
tify optimal constellations, including simulation, ana-
lytical analysis and in recent years heuristic optimisa-
tion methods, such as GAs. Some of the objectives of
the optimisation are to minimise the number of satel-
lites as well as performance metrics such as the revisit
time and DOP values. In the following segment, lit-
erature designing navigation constellations based on
DOP values, as well and its limitations, will be re-
viewed. Some literature focuses on the minimisation
of the Geometric Dilution of Precision (GDOP), how-
ever for the reasons stated in Section 2.1 this paper
uses the PDOP.
Casanova (Casanova et al., 2014) attempts to re-
produce the Galileo constellation, using a basic GA,
a Particle Swarm Optimiser (PSO) and a coarse grid
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
332

enumeration and compares their results. While all
three algorithms produce promising results, they were
applied to a search space limited to eccentricity, incli-
nation, and argument of perigee alterations, and still
required a day and a half to reach convergence despite
the limitations.
Multi-objective constellation design is presented
in (Han et al., 2021) utilising a Multi-Objective Par-
ticle Swarm Optimiser (MOPSO) to minimise cost,
represented by the altitude, minimisation of the PDOP
and the maximisation of the number of visible satel-
lites. For the augmentative constellation, to be de-
signed, an altitude interval of 1000km is given and
only circular orbits are considered. The paper utilises
the 2D Lattice representation, fixing the number of
satellites, as well as all orbital parameters except the
altitude and inclination. The MOPSO produces a con-
stellation with an improved homogeneous coverage,
but neglects the advantages a larger altitude range
and eccentric orbits have for global coverage (Ballard,
1980).
An example of a more complete optimisation is
presented in (Hitomi and Selva, 2018), which adds the
constellation size as a variable. Here, no constellation
framework is used, such that each satellite is placed
independently. But similarly to other publications, the
variable intervals are kept small with the semi-major
axis having a range of 600km and the satellite num-
ber being limited to twenty. Until now, no optimisa-
tion of the complete search space with large constel-
lations has been carried out, warranting further devel-
opments.
4 PROPOSED APPROACH
Having discussed basics and previous work in the
field of constellation design, the following section
seeks to find a suitable formulation for an optimiser
to solve the complete design problem.
4.1 Methodology Discussion
In (Casanova et al., 2014), single-objective optimisa-
tion is explored using the GDOP as the quality met-
ric, comparing a Simulated Annealing (SA) approach
with a classic GA. Here, the GA performs better in re-
gard to the given constellation design problem. Since
the design problem does not necessarily have a sin-
gle optimum (uni-modal), single-solution algorithms
such as SA relying on exploitation can get stuck in
local optima very easily. The exploration proper-
ties provided by population-based approaches, such
as GAs, help to avoid this issue, making population-
based algorithms the preferred methodologies for
high complexity problems, such as the one described
here. In most literature the design problem is run as
a single objective optimisation. While some papers
focus on the GDOP minimisation (Casanova et al.,
2014), in (Paek et al., 2019) a weighted sum of objec-
tives is used as the fitness function, including constel-
lation cost and revisit time in addition to the GDOP.
Forming a weighted sum instead of using a multi-
objective algorithm simplifies the program structure
and reduces computation time. However, due to a
significant loss of solution quality the benefits of the
simpler formulation are negated. So, while a single-
objective formulation can be used for an initial analy-
sis of the problem formulation and constellation rep-
resentation, an expansion to multiple objectives must
be incorporated at a later stage. The topology pre-
sented in (Choo et al., 2024) shows that in the con-
text of constellation design the focus lies on optimi-
sation algorithms such as PSO (Han et al., 2021)
and GAs (Whittecar and Ferringer, 2014), with arti-
cles such as (Casanova et al., 2014) and (Casanova
et al., 2012) comparing their performance. Gener-
ally, PSO shows higher fitness results with faster con-
vergence, due to the deterministic nature of the up-
date mechanism compared to a generic GA (Casanova
et al., 2014). However, GAs are often preferred
for multi-objective optimisation, as extensive research
has gone into enabling simplified implementations
based on well-established base algorithms and pre-
defined operators (Konak et al., 2006). Addition-
ally, there are enough well documented GA formu-
lations available, such as the Non-dominated Sorting
Genetic Algorithm 2 (NSGA-II) (Deb et al., 2002),
that allow an easy recreation of the base algorithms,
which can then be expanded and adapted for the spe-
cific use case. The wide variety of operators available
for GAs enables the improvement of the algorithm
to match, if not surpass the performance of multi-
objective PSO (Konak et al., 2006). Some potential
expansions of the algorithm include the introduction
of dynamic operator selection, and the reformulation
of the problem encoding into a variable-length chro-
mosome representation. This method is based on a
theory called building block hypothesis, which sug-
gests that constellations of different sizes will have
geometrical similarities like building blocks, mean-
ing constellations with similar orbital parameters will
also be similar in quality, even with different amounts
of satellites. The use of this representation allows
the inclusion of constellation size as a variable to
be optimised, avoiding the redundancies caused by
running separate optimisations for different constel-
lation sizes. (Hitomi and Selva, 2018) presents an ap-
Satellite Navigation Constellation Optimisation Problem Definition for the Application of Genetic Algorithms
333

proach to using this method for constellation design,
introducing the necessary constellation representation
and operators to solve the problem. While the pa-
per demonstrates a significant reduction of redundan-
cies when optimising for a given range of constella-
tion sizes, and therefore a reduced computational ef-
fort and increased convergence rate, the novelty of the
method introduces a few concerns. Neither the oper-
ators nor the representation presented in (Hitomi and
Selva, 2018) can be directly applied to the problem
formulation chosen for this setting, making the cre-
ation of new operators necessary. While the advan-
tages warrant further research into the use of variable-
length chromosomes, particularly for a broad constel-
lation size search space, it will not be a part of the
initial algorithm.
4.2 Constellation Representation
As discussed in Section 2.2, using an existing constel-
lation framework simplifies optimisation immensely
due to the minimisation of the variables to be op-
timised. Ideally, the framework is formulated as
generic as possible to avoid exclusion of good per-
forming constellations. This is best done using the
Lattice Flower constellations, and since elliptical or-
bits should not be excluded, either the 3D or 4D for-
mulation has to be used. The 3D Lattice constellation
includes classical Walker, as well as elliptic Walker,
harmonic Flower and Draim constellations, only leav-
ing out non-symmetric constellations such as non-
harmonic Flower and SOC constellations. While 4D
provides the most generalised option, allowing differ-
ing semi-major axes, the complexity of the formula-
tion is not deemed worth it (Arnas et al., 2021). The
augmentation constellation to be designed is meant
as a single purpose constellation used for GNSS en-
hancement, and the variation of the semi-major axis
within a shell does not seem likely to provide higher
performance results for such a constellation, but in-
stead just an increase in launch cost and constellation
maintenance. A possible addition of further constel-
lation shells at different altitudes does not require a
4D representation. A representation including non-
symmetric constellations is presented in (Davis and
Mortari, 2012) but would need to undergo further re-
search to be used, therefore the non-symmetric con-
stellations have to be analysed separately. Since the
3D Lattice, while yielding good results (Xu et al.,
2022), is a new approach and requires more param-
eters, the 2D representation (Casanova et al., 2014;
Han et al., 2021) will be used initially to validate the
algorithm and fitness function formulation. The later
expansion of the algorithm to incorporate additional
variables for the 3D lattice poses no issues, and the
constellation creation module simplifies implement-
ing new constellation frameworks. An in-depth ex-
planation of the generation module is given in Sec-
tion 4.5. For the definition of a 2D Lattice Flower
constellation, three integer values and six continuous
orbital elements are needed. The integers to be de-
fined are the number of satellites per plane, the num-
ber of planes and the phasing parameter. These vari-
ables introduce some dependencies that complicate
the inclusion into the optimiser loop. Firstly the satel-
lites have to be evenly distributed between planes, so
the total number of satellites has to be a multiple of
the number of planes. While using the number of
satellites per plane as a parameter instead of the to-
tal number of satellites does avoid this dependency,
new issues pertaining the parameter bounds are intro-
duced. Instead of introducing these dynamic bounds,
a correction function is used to round to the closest
integer that is a multiple of the number of planes. Ad-
ditionally the phasing parameter, describing the rela-
tive phasing between satellites on different planes, has
to be an integer smaller than the number of planes.
To ensure this, a second fixing function introduced
in Section 4.3 is used. Since the Phasing parameter
influences the position of the satellites, it not only af-
fects coverage related metrics, such as the DOP and
number of visible satellites, but additionally has an
impact on the intra-constellation collision risk, deter-
mined by the distance between satellites. To minimise
the risk, (Liang et al., 2021) selects the phasing pa-
rameter to maximise the minimum distance between
satellites during the course of their simulations. Colli-
sions are unlikely to occur during the simulation peri-
ods, since they are mostly caused by small deviations
of the satellite positions over the long term operation
of a constellation. So, for the design of an operable
constellation, the collision risk should be taken into
account. This can be done by excluding the phas-
ing parameter from the optimisation and selecting it
as described in (Liang et al., 2021), or by including
the collision risk as an objective to be minimised. To
choose the adequate approach, the influence of the
phasing parameter on the remaining objectives needs
to be quantified, to see whether it is negligible or if
the phasing parameter needs to remain as an optimi-
sation variable. The necessary sensitivity study will
be carried out during later iterations of the approach
presented in this paper.
Excluding the phasing parameter from the opti-
misation would still leave the number of planes and
satellites as integer values. This introduces the ad-
ditional complexities of mixed integer programming.
To consider the desired data types of the different pa-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
334

rameters, they are written in, and read from an input
file. Since only continuous intervals are considered,
the values marked as integers are rounded after ap-
plication of the mutation operator. In addition to the
integer parameters, the six orbital elements of the first
satellite have to be optimised. With these parame-
ters a single layer constellation can be created. How-
ever, multi-layer or multiple shell constellations can
be advantageous for a lot of applications, since having
satellites at different altitudes can combine the higher
signal strength of LEO satellites and greater coverage
of, for example, MEO constellations. Adding another
shell encompasses the full optimisation of an addi-
tional constellation, which can be done by extend-
ing the parameter list with further sets of constella-
tion parameters. This, however, means each shell is
part of the optimisation instead of allowing the num-
ber of layers to be an optimisation parameter itself.
The variable length chromosome representation can
be applied in this scenario. (Hitomi and Selva, 2018)
present an approach to optimising a constellation by
defining each satellite individually. However, as dis-
cussed previously, an optimisation without the use of
a framework would cause enormous computational
costs as well as complications in the dynamic com-
patibility of the satellites, meaning this representation
cannot be seriously considered for the optimisation of
large constellations. Instead the satellite definitions
could be replaced by different constellations layers,
enabling the creation of multi-layer constellations.
4.3 Update Mechanism and
Termination
Choosing not to implement a variable-length chro-
mosome representation simplifies the operator choice
considerably, as existing, well researched operators
can be used in the algorithm, and it is possible to
rely on a program structure that has been tested for its
quality and convergence. (Hitomi and Selva, 2018)
present two operators specifically designed to deal
with the chromosome length, which can be further
analysed when considering the expansion to multi-
layer constellation design. The implementation of the
NSGA-II includes selection, mutation and crossover
operators that are written to allow external alteration
of their hyperparameters. Tournament selection is
carried out to sample the parent individuals to be al-
tered. For this a batch of parents is sampled and the
one with the highest rank and lowest crowding dis-
tance is chosen to create offspring. The batch size
can be adapted to make the algorithm more or less
elitist, with the default being set to binary tourna-
ment selection. Two-point crossover is used unless
there are fewer than four parameters, in which case
NSGA-II falls back to one-point crossover. Since in-
equality constraints can be set between parameters, a
correction function is used in the case that a viola-
tion is caused due to crossover results. The correc-
tion function chooses a new parameter value from a
normal distribution centred at the violated boundary.
Mutation of the parameters is carried out based on
a truncated normal distribution with the mean set at
the parameter of the parent. Sampling from the trun-
cated distribution avoids having to rely on a correction
function to fix parameters outside the allowed bounds.
The standard deviation can be adjusted to favour ex-
ploration or exploitation.
The main focus of (Hitomi and Selva, 2018) lies
on the variable-length chromosome representation,
but it additionally proposes a tool for Adaptive Oper-
ator Selection (AOS). The selection process consists
of a credit assignment and operator selection strategy,
meaning the performance of each operator is moni-
tored over a given amount of generations and given
a score. The operator performance is measured by
the quality of solutions produced, as well as the oper-
ator’s exploration ability, this is important to escape
local optima (Wei et al., 2023). Based on the as-
signed score the algorithm prioritises the use of high-
performance operators, while allowing some explo-
ration for possible improvement of lower scored oper-
ators (Fialho, 2010). Consistently adapting active op-
erators can lead to an improved convergence and qual-
ity of the optimisation. In recent years, approaches
to utilise reinforcement learning for the design of a
selection strategy have been proposed (Aydin et al.,
2023). The implementation of AOS requires further
investigation.
Due to the large variety of constellation applica-
tions, no universal number of generations can be set
for termination. A value for the number of genera-
tions can be determined on a case by case basis, based
on a target fitness value and the given search space.
Adapting these hyperparameters to the problem, can
help avoid unnecessary computational effort, while
also allowing the discovery of above threshold solu-
tions. Computational cost can be further reduced by
not only terminating after a fixed number of genera-
tions, but in addition tracking the improvement per-
centage between generations and setting a minimum
for it. When the improvement ends up at a plateau,
and sufficient convergence is assumed the optimiser
can terminate without having reached the maximum
number of generations.
Satellite Navigation Constellation Optimisation Problem Definition for the Application of Genetic Algorithms
335

4.4 Fitness Function
While the optimiser formulation presented in this pa-
per can be used for any type of constellation, the focus
lies on augmentative constellations for GNSS. There-
fore, the fitness function formulation and evaluation
will be based on the corresponding requirements. As
introduced in Section 2.1, the PDOP is used as the
initial objective metric, with the number of satellites
as an additional objective. For the design of an aug-
mentation constellation, the constellation to be opti-
mised would be analysed as an overlay to an exist-
ing GNSS constellation. The PDOP is a value ob-
tained for defined ground stations on Earth’s surface
and measured periodically over the simulation period.
Therefore, the fitness function needs to be formulated
to combine the obtained values in a way, that allows
to optimise for the coverage and improvement goals
set. In (Casanova et al., 2014), the GDOP is mea-
sured on 30 000 globally distributed ground stations
over a sixty second propagation period. The fitness
function is then chosen so that the maximal GDOP
found is minimised. Taking the example of Galileo
seen in Figure 2, the above-mentioned fitness formu-
lation could lead to improvements in the lower per-
formance areas, such as the poles, but would only be
slightly better in other areas of interest. A more re-
liable formulation to ensure the wanted results would
be to choose the mean PDOP as the fitness. This al-
lows to optimise for a global improvement by evenly
distributing the measurements, but also makes refor-
mulation for regional improvements very straightfor-
ward; the prioritisation could simply be represented
by the ground station distribution without needing ad-
ditional objectives for the same metric. Once the cho-
sen constellation is propagated, the PDOP is calcu-
lated by an analysis module (cf. Figure 5).
Satellite constellations, however, are analysed
based on more than one metric, so an expansion to
multiple objectives as in (Han et al., 2021) is reason-
able. Having decided against a weighted sum of ob-
jectives, a different fitness function has to be formu-
lated for each objective. Some of the objectives that
will be considered after the initial testing of algorithm
and problem formulation include revisit time and cost
of the constellation. The minimisation of revisit time
and improved visibility from specific locations are vi-
tal factors for effective communication with ground
stations. Both can be calculated and analysed with
the propagated orbits of the constellation.
The calculation of the constellation cost is a more
complex problem, as numerous factors have to be
considered for a complete representation. The main
part of the cost is made up of the individual satellites,
which can be considered by minimising the number of
satellites. Additionally, LEO satellites tend to be less
expensive when compared to satellites for higher or-
bits, both due to the launch cost as well as the satellite
cost itself. Another expenditure that is highly depen-
dent on the optimisation parameters is the cost of the
launch, as it is affected by the specific orbits as well
as the number of planes and satellites. (Han et al.,
2021) seeks to minimise the orbit altitude to avoid the
cost of launching to higher orbits, but a more com-
plete representation is given in (Huang et al., 2021).
They include the effects of the orbital inclination with
respect to the latitude of the launch site, finding that
for high inclinations the advantages gained from the
Earth’s rotation are negated. This means a minimal
difference between orbital inclination and latitude of
launch site is preferred. The maintenance costs occur-
ring throughout the life time of the constellation can
be taken into account as well. These consist of cal-
culating the manoeuvres needed to counter the orbit
degradation caused by atmospheric drag and J
2
per-
turbations. (Han et al., 2021) proposes a formula for
the cost of altitude maintenance for LEO satellites,
since for lower orbits the drag effects have to be con-
sidered. A formulation for the J
2
effects is not given
since only circular constellations are considered in the
article and a standalone constellation is analysed for
which only the relative position of the satellites within
the constellation is relevant, as the J
2
effects are taken
as uniform over the whole constellation. However,
the algorithm presented in this paper, is meant to be
able to optimise non-circular orbits as well, making
the perturbations non-negligible. The use of the 3D
Lattice representation should allow for minimal main-
tenance cost, but its effectiveness and the long-term
propagation with respect to the main GNSS constella-
tions will have to be further analysed. While the cost
factors already require a trade-off, combining them
into a single fitness function would avoid the com-
plexities of adding further objectives.
The complete formulation of the constellation de-
sign problem is made to allow exploration of aug-
mentation constellations outside of LEO constella-
tions. LEO augmentation constellations have recently
gained prominence due to their potential to improve
positioning accuracy, particularly in urban canyons.
Tall buildings and narrow streets in urban canyons of-
ten degrade signals, cause disruptions due to blockage
and attenuation, and obstruct satellite visibility (More
et al., 2022; Xu et al., 2020), causing positioning inac-
curacies and outages. However, due to the disadvan-
tages of LEO constellations detailed in Section 1 an
analysis of other augmentation constellations is also
deemed necessary.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
336

4.5 Implementation
The optimisation will be implemented inside the Sys-
tem and Service Volume Simulation Environment
(S²VSE) (Bernhardt et al., 2024) developed at the
Galileo Competence Center. S²VSE is a modular
and flexible simulation and performance analysis tool,
it enables the reproduction, analysis and study of
current and future PNT systems and services. For
evaluations different parameter can be adjusted to
meet conditions like changes in constellation, impact
of new technologies or external factors like space
weather, overall this allows the assessment and pre-
diction of Key Performance Indicators (KPIs) like ac-
curacy, availability, continuity and integrity. S²VSE
is based on individual modules, which are mainly im-
plemented in Python and are connected via RCE (Re-
mote Component Environment).
The workflow, as depicted in Figure 5, starts with
the provision of a baseline constellation for the opti-
miser, which can either already be a multi-layer sys-
tem or a single layer constellation. Each layer of the
system is described in its own input file, based on the
characteristic of the layer like number of planes and
satellites per plane, these are then forwarded to the
constellation generator. This module will take the pa-
rameters from each file and sets up the complete con-
stellation for propagation. Currently, the propagation
is done via a third-party software the General Mis-
sion Analysis Tool (GMAT) provided by the National
Aeronautics and Space Administration (NASA). In
order to circumvent some constraints of the software
there are ongoing efforts to transition to an alterna-
tive solution that is being developed internally. The
duration of the propagation is dependent on the cre-
ated constellation and has to cover a complete repeat
orbit. After the propagation finishes, the data will be
parsed in a format to be compatible with the subse-
quent modules. At this point, visualisations can be
created, showing the resulting ground tracks or the
orbits. The next step is the calculation of the DOP
values. For this, in addition to the orbit data, the po-
sition of the receiver is necessary. The receiver can
be either a real location, an arbitrary number of re-
ceivers split over an area or a multitude of receivers
purposefully placed to create a certain scenario. Af-
ter the values have been calculated, the results can be
shown either as a plot of a region or as line charts for
each single receiver. The DOP values are also used
as input data for the optimiser to start the next itera-
tion of the loop with the goal to achieve an optimal
solution. Aside from the visualisation mentioned, the
data of each module can also be saved as a data file
and then used for additional analysis.
5 EXPERIMENT
5.1 Experimental Setup
The validation of the problem definition and workflow
set-up was carried out using the NSGA-II (Deb et al.,
2002) on a simple scenario. A Walker Delta constella-
tion is to be optimised for minimal PDOP achievable
with the minimum number of satellites.
Table 2: Constellation parameters. LB and UB describe the
upper and lower bounds, respectively.
Parameter LB UB
Number of Planes 4 20
Number of Satellites 32 400
Phasing Parameter 1 -
Semi-major axis 6771 km -
Argument of periapsis 0° -
Eccentricity 0 -
Inclination 45° 135°
Right Ascension 0° -
True Anomaly 0° -
All but three parameters were initially fixed and
a limited search space was given for the parameters
to be optimised. The NSGA-II based optimiser was
set to have a population size of 30 constellations and
to terminate after 20 generations. To cover one re-
peat orbit, as explained in Section 2.1, the simulations
were set up to cover a time span of three days. Since
the time to repeat an orbit is dependent upon both alti-
tude and inclination, the maximum time interval was
selected to accommodate the chosen parameters. The
satellites were propagated with time steps of two min-
utes to reduce the time needed for simulations, while
still having multiple epochs during each overflight per
satellite. Even with reduced propagation time and the
coarse step size simulation time is around 30 min-
utes for each constellation. Relying on parallelisation
to run all constellations of a generation at the same
time it takes 30 minutes per generation and around 10
hours for one optimisation run, this will also change
depending on how many receiver are considered dur-
ing the PDOP analysis. For the initial scenario a sin-
gle station was simulated without any regard to Non-
Line of Sight (NLOS) situations, which will be cov-
ered in more detailed follow up scenarios. The fit-
ness of a constellation is calculated by averaging the
PDOP values obtained at each time step and penal-
ising the constellations with discontinuous coverage.
The penalisation consists in setting the average PDOP
to 10000 and the number of satellites to the maximum
allowed, essentially disabling the constellation.
Satellite Navigation Constellation Optimisation Problem Definition for the Application of Genetic Algorithms
337
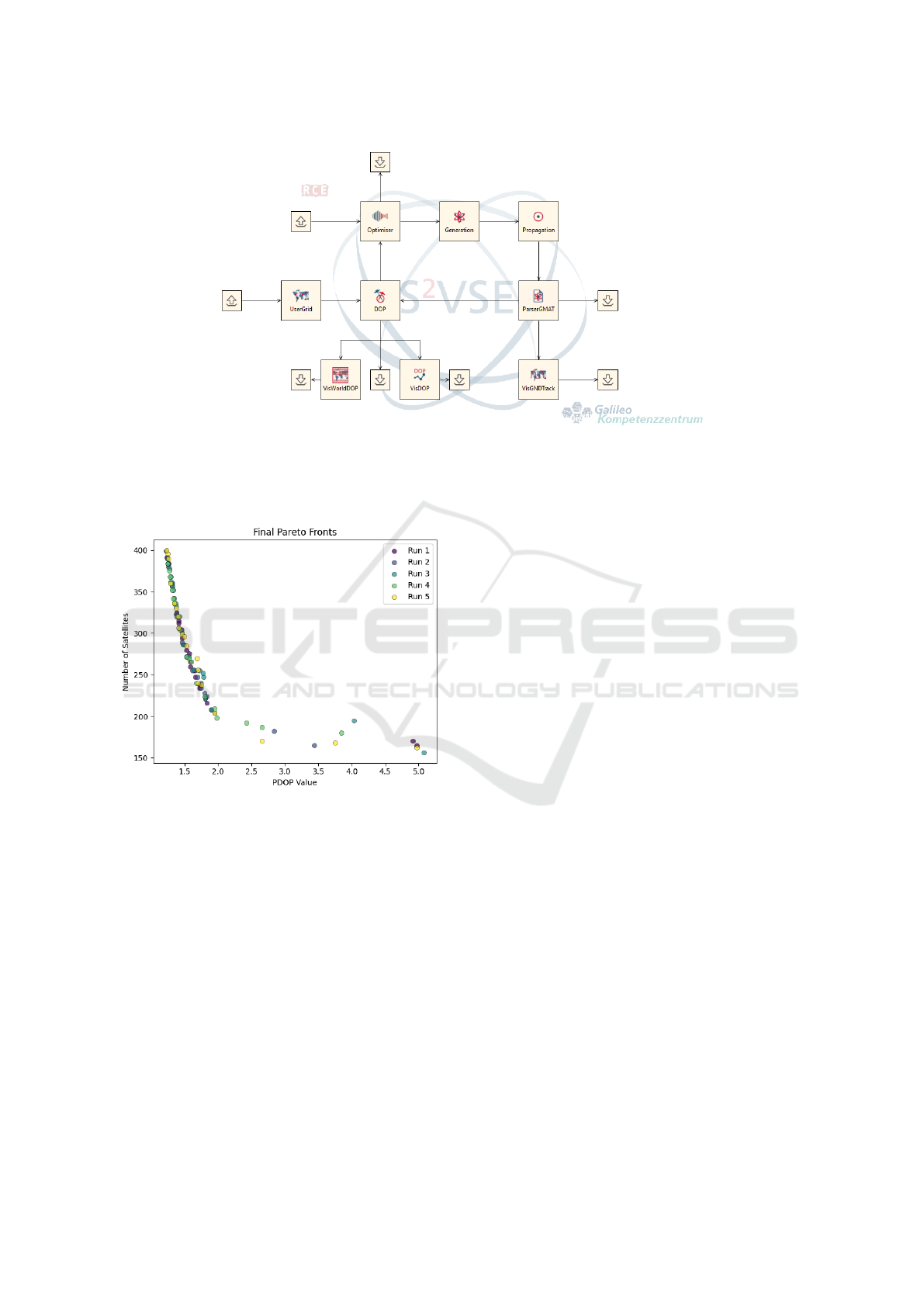
Figure 5: Workflow for the optimisation of constellations in regards to DOP values.
5.2 Simulation Results
Figure 6: Final Pareto front based on the results of five sim-
ulation workflows.
Figure 6 shows the Pareto fronts for the problem
described in Section 5.1, generated by running the
NSGA-II five times. The algorithm gives consistent
and plausible results, as visible in the front created
by the different runs and the fact that the PDOP fol-
lows the expected outcome for different numbers of
satellites. However, an ideal constellation can not be
chosen with the given set up, since more application
specific information has to be known to pick from the
front. This would include for example, more precise
data on constellation cost and budget, as well as the
required PDOP values.
6 DISCUSSION
The long simulation times, especially when consider-
ing global coverage and large receiver grids, required
constraints for initial testing, as shown in Section 5, to
provide justification for more computationally expen-
sive optimisations. The provided results encourage
expanding the simulation scenarios to be able to cover
a broader range of use cases. This expansion should
also include a switch to a more general constellation
framework and the optimisation of more parameters
with larger intervals. Additionally, more objectives
should be introduced to consider more factors impact-
ing constellation design. Since more than three objec-
tives will be relevant, implementations of additional
GAs, such as NSGA-III and Strength Pareto Evolu-
tionary Algorithm II (SPEA-II) will be compared to
the current Algorithm. Due to the complexity of the
problem, the used algorithms need to be expanded to
improve the operators and their use. A static, gen-
eration dependent hyperparameter adjustment will be
used and later expanded to adaptive operator selec-
tion. As mentioned in Section 4.2, an implementation
of the 2D Lattice Flower representation and subse-
quently the 3D representation for perturbation con-
siderations will be used. However, the continuous
coefficient representation (Davis and Mortari, 2012)
should also be considered, as it includes non-uniform
representations, in addition to the uniform constella-
tions included in the 3D Lattice representation. For
the optimisation of multi-layer constellations the vari-
able length chromosome representation will be inves-
tigated. This paper shows that the utilisation of GAs
could give insights into future possibilities in the field
of augmentative PNT constellations and aid the com-
plex constellation design process.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
338

ACKNOWLEDGEMENTS
This work was partially funded by the Deutsche
Forschungsgemeinschaft DFG (HA 5480/10-1).
REFERENCES
Arnas, D., Casanova, D., and Tresaco, E. (2021). 4d lattice
flower constellations. Advances in Space Research,
67:3683–3695.
Avenda
˜
no, M., Davis, J., and Mortari, D. (2013). The 2-
D lattice theory of Flower Constellations. Celestial
Mechanics and Dynamical Astronomy, 116:325–337.
Aydin, M. E., Durgut, R., and Rakib, A. (2023). Adaptive
operator selection utilising generalised experience.
Ballard, A. H. (1980). Rosette constellations of earth satel-
lites. IEEE Transactions on Aerospace and Electronic
Systems.
Beech, T. and Dutruel-Lecohier, G. (2013). A study of three
satellite constellation design algorithms.
Bernhardt, S., Eiselbrecher, F., and Schmidt, A. (2024).
System and service volume simulation environment
s²vse. In Proceedings of the 37th International Tech-
nical Meeting of the Satellite Division of The Institute
of Navigation (ION GNSS+ 2024), pages 855–866.
Casanova, D., Avendano, M., and Mortari, D. (2012). Op-
timizing Flower Constellations for Global Coverage.
In AIAA/AAS Astrodynamics Specialist Conference
2012.
Casanova, D., Avenda
˜
no, M., and Mortari, D. (2014). Seek-
ing GDOP-optimal Flower Constellations for global
coverage problems through evolutionary algorithms.
Aerospace Science and Technology, 39:331–337.
Choo, N., Ahner, D., and Little, B. (2024). A Survey of Or-
bit Design and Selection Methodologies. The Journal
of the Astronautical Sciences, 71.
Davis, J., Avenda
˜
no, M., and Mortari, D. (2013). The 3-
D lattice theory of Flower Constellations. Celestial
Mechanics and Dynamical Astronomy, 116:339–356.
Davis, J. and Mortari, D. (2012). Reducing walker, flower,
and streets-of-coverage constellations to a single con-
stellation design framework. Advances in the Astro-
nautical Sciences, 143:697–712.
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T. (2002).
A fast and elitist multiobjective genetic algorithm:
NSGA-II. IEEE Transactions on Evolutionary Com-
putation, 6(2):182–197.
Fialho, A. (2010). Adaptive Operator Selection for Opti-
mization. PhD thesis, Universite Paris-Sud.
Han, Y., Wang, L., Fu, W., Zhou, H., Li, T., Xu, B., and
Chen, R. (2021). Leo navigation augmentation con-
stellation design with the multi-objective optimiza-
tion approaches. Chinese Journal of Aeronautics,
34(4):265–278.
Hitomi, N. and Selva, D. (2018). Constellation optimization
using an evolutionary algorithm with a variable-length
chromosome representation. In 2018 IEEE Aerospace
Conference, pages 1–12.
Huang, S., Colombo, C., and Bernelli-Zazzera, F. (2021).
Multi-criteria design of continuous global coverage
walker and street-of-coverage constellations through
property assessment. Acta Astronautica, 188:151–
170.
Konak, A., Coit, D., and Smith, A. (2006). Multi-objective
optimization using genetic algorithms: A tutorial. Re-
liability Engineering & System Safety, 91:992–1007.
Li, X., Jiang, K., and Li, P. (2023). Analysis of naviga-
tion augmentation performance based on leo satellite
communication constellation. In China Satellite Nav-
igation Conference (CSNC 2024) Proceedings.
Liang, J., Chaudhry, A. U., and Yanikomeroglu, H.
(2021). Phasing parameter analysis for satellite col-
lision avoidance in starlink and kuiper constellations.
In 5G World Forum Workshop on Satellite and Non-
Terrestrial Networks.
More, H., Cianca, E., and Sanctis, M. D. (2022). Position-
ing performance of leo mega constellations in deep ur-
ban canyon environments. In 25th International Sym-
posium on Wireless Personal Multimedia Communi-
cations (WPMC).
Mortari, D., Wilkins, M., and Bruccoleri, C. (2004). The
flower constellations. The Journal of the Astronautical
Sciences, 52.
Nadoushan, M. J. and Assadian, N. (2015). Repeat ground
track orbit design with desired revisit time and optimal
tilt. Aerospace Science and Technology, 40:200–208.
Paek, S. W., Kim, S., and de Weck, O. (2019). Opti-
mization of reconfigurable satellite constellations us-
ing simulated annealing and genetic algorithm. Sen-
sors, 19(4):765.
Walker, J. G. (1970). Circular Orbit Patterns Providing
Continuous Whole Earth Coverage. Technical report,
Royal Aircraft Establishment Farnborough.
Wei, W., Xuan, M., Li, L., Lin, Q., Ming, Z., and Coello
Coello, C. A. (2023). Multiobjective optimization al-
gorithm with dynamic operator selection for feature
selection in high-dimensional classification. Applied
Soft Computing, 143:110360.
Whittecar, W. and Ferringer, M. (2014). Global Coverage
Constellation Design Exploration Using Evolutionary
Algorithms. In AIAA/AAS Astrodynamics Specialist
Conference 2014.
Xu, H., Hsu, L., Lu, D., and Cai, B. (2020). Sky visibil-
ity estimation based on gnss satellite visibility: an ap-
proach of gnss-based context awareness. GPS Solu-
tions, 24.
Xu, X., Ju, Z., and Luo, J. (2022). Design of constellations
for gnss reflectometry mission using the multiobjec-
tive evolutionary algorithms. IEEE Transactions on
Geoscience and Remote Sensing, 60.
Satellite Navigation Constellation Optimisation Problem Definition for the Application of Genetic Algorithms
339
