
Leveraging Edge and Fog Resources While Complying with EU’s GDPR
Matilde Silva, Pedro C. Diniz
a
and Gil Gonc¸alves
b
SYSTEC, Faculdade de Engenharia, Universidade do Porto, 4200-465 Porto, Portugal
Keywords:
Edge Computing, Fog Computing, Industrial Internet of Things (IIoT), Industry 4.0, Fault Tolerance, IEC
61499, Real-Time Data Processing.
Abstract:
In Industry 4.0 environments, video-based monitoring systems must now reconcile performance demands with
the privacy mandates of the European Union’s (EU) General Data Protection Regulation (GDPR). This paper
presents a fault-tolerant edge/fog architecture designed to anonymize visual data at the point of capture, mini-
mizing personal data exposure while maintaining low-latency analytics. Built on the IEC 61499 standard, the
system uses DINASORE to run Function Blocks directly on edge devices, and T-Sync as an orchestrator that
dynamically reallocates tasks in response to topology changes. Empirical evaluations demonstrate that the ar-
chitecture reliably recovers from node loss and stays within resource limits even on modest hardware. Despite
bottlenecks under heavy vision workloads, the results show the viability of deploying GDPR-compliant IIoT
pipelines without offloading sensitive data to the cloud.
1 INTRODUCTION
Internet of Things is an ubiquitous tool in the realm of
industry and is identified as the Industrial Internet of
Things (IIoT), with broad and diverse application ar-
eas in sectors such as agriculture, environmental mon-
itoring, security surveillance, and others (Xu et al.,
2014).
The vast amounts of data generated by IIoT sen-
sors can be used to analyse, and even optimize, the
system’s performance, i.e. by using the information
to train Artificial Intelligence and Machine Learning
algorithms (Murugesan, 2016).
In the long run, IIoT data analytics can im-
prove performance and reduce spending costs, both
of which greatly benefit a company (Jeschke et al.,
2017). As such, industrial manufacturers are increas-
ingly interested in research that helps in efficient re-
source usage.
Although these efficiency gains are attractive, the
same sensor networks now gather large volumes of
personal data, especially video streams that capture
employees and visitors on the industrial floor. In the
EU, such data are protected by the General Data Pro-
tection Regulation (European Parliament and Council
of the European Union, 2025), which forces data con-
trollers to minimize the amount of personally identi-
a
https://orcid.org/0000-0003-3131-9367
b
https://orcid.org/0000-0001-7757-7308
fiable information they collect.
A concrete example of this comes from Bosch
Ovar. Warehouse cameras that track stock move-
ments inevitably record workers passing through the
scene. To avoid the administrative burden of obtain-
ing individual consent for every employee, it is re-
quired that raw frames be anonymized before any
footage is stored or forwarded upstream.
Current architectures that rely on edge and fog
computing are not equipped to handle large amounts
of video data and to be part of a system that is
highly volatile and needs to tolerate and accommo-
date spontaneous changes, without needing manual
re-deployment.
To overcome these limitations, we propose an
edge and fog architecture in which lightweight IEC
61499 Function Blocks run on DINASORE-enabled
edge devices, while a T-Sync orchestrator automati-
cally redeploys changes of workload as the physical
topology evolves.
This article thus makes the following contribu-
tions:
• It describes the development of a fault-tolerant
Edges/Fog IEC 61499-based system, centred
around function blocks and modular software
components.
• It presents experimental results that show the ef-
fectiveness of a dynamic task orchestrator in re-
sponse to topology changes while maintaining ad-
518
Silva, M., Diniz, P. C. and Gonçalves, G.
Leveraging Edge and Fog Resources While Complying with EU’s GDPR.
DOI: 10.5220/0013781300003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 518-525
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

equate Quality of Service (QoS) regarding a video
stream and the anonymization of video images.
• Its shows that it is possible to build a fault-tolerant
Edges/Fog image acquisition system while com-
plying with the EU’s stringent GDPR require-
ments.
The pervasiveness of IIoT and in particular the use
of video processing capabilities coupled with reliable
video capture analysis for security and enhanced per-
formance in factory settings is a growing need. To
be effective, these systems need to be both reliable
and support the EU’s GDPR. This article shows that
it is possible to develop Edge/Fog systems that can
meet all functional and quality requirements, with an
architecture that is both flexible and reliable.
The remainder of this paper is structured as fol-
lows. In the next section 2, we describe the methodol-
ogy of the literature review, highlighting related work,
as well as technologies. Section 3 describes the IEC
61499 edge/fog architecture and its implementation.
In Section 4, we present empirical results from a fault,
stress and topology evaluation methodology and we
conclude in Section 5 with key takeaways and av-
enues for future research.
2 RELATED WORK
2.1 Systematic Literature Review
The systematic review began with defining core con-
cepts such as Industrial IoT, edge- and fog-based
computing, and decentralised orchestration. Using
these terms, searches were run across four databases:
(1) IEEE Xplore, (2) ACM Digital Library, (3) Sco-
pus and (4) ScienceDirect.
A series of filters were then applied, i.e. En-
glish language, peer-reviewed status, and a publica-
tion window from 2019 onwards.
2.2 State of the Art
The current body of work shows a shift from cloud-
only pipelines toward edge- and fog-centred IIoT
architectures (Bonomi and Milito, 2012; Mahmud
et al., 2018). Researchers point to network-saturation
risks, the heterogeneity of devices and the need for
millisecond-scale feedback as key drivers for this
change (Murugesan, 2016). Microservice designs
have also become popular because they break mono-
liths into independently deployable bits, yet they
also introduce heavier inter-service coordination and
higher management overhead once dozens of cam-
eras or sensors join the network (Torvekar and Game,
2019; Vural et al., 2017; Dinh-Tuan et al., 2019).
At the same time, real-time constraints and the push
for event-driven behaviour keep solutions drifting
away from traditional Service Oriented Architectures
(SOA) stacks toward lighter, decentralised runtimes.
Despite that progress, two blind spots remain.
First, privacy is still treated almost exclusively as a
transport problem, while the GDPR principle of data
minimisation is not taken into account (Liu et al.,
2020). Second, most orchestrators assume a static
inventory of edge nodes, which forces engineers to
step in and re-deploy services by hand when neces-
sary (Hu et al., 2024; Etemadi et al., 2020). These
manual touchpoints undo the resilience and scalabil-
ity promised by edge computing and leave factories
with a more rigid infrastructure. Bridging these gaps
calls for an architecture that anonymises data at the
point of capture and re-allocates workloads automat-
ically as the topology shifts, without sacrificing the
deterministic behaviour demanded by industrial con-
trol.
2.3 Enabling Technologies
Among the frameworks already recognised by the
community, the IEC 61499 standard stands out as
the most mature option for event-driven automation.
Its Function-Block model cleanly separates behaviour
from deployment, letting the same logic migrate be-
tween devices without altering timing semantics; a
property that aligns well with the low-latency, recon-
figurable needs surfaced in the previous section (Vy-
atkin, 2016). Because the standard also mandates ex-
plicit data-and-event interfaces, it naturally supports
fine-grained placement decisions at run time while
preserving the determinism expected on a safety-
critical line.
Complementing the standard, the Eclipse 4Diac
tool provides a graphical IDE for composing Func-
tion Block (FB) networks(Eclipse Foundation, 2024).
Together, IEC 61499 and 4Diac form an off-the-shelf
foundation on which more adaptive, privacy-aware ar-
chitectures can be built.
Extending this foundation, DINASORE offers a
lightweight Python runtime that executes IEC 61499
networks directly on the edge devices, allowing ac-
cess to modern Python libraries without breaking the
event-driven semantics of the standard (Pereira et al.,
2020). Each FB becomes a self-contained Python
module, fully customizable and editable.
Dynamic placement of those blocks is handled by
T-Sync, a minimalist orchestrator written in Python
Leveraging Edge and Fog Resources While Complying with EU’s GDPR
519
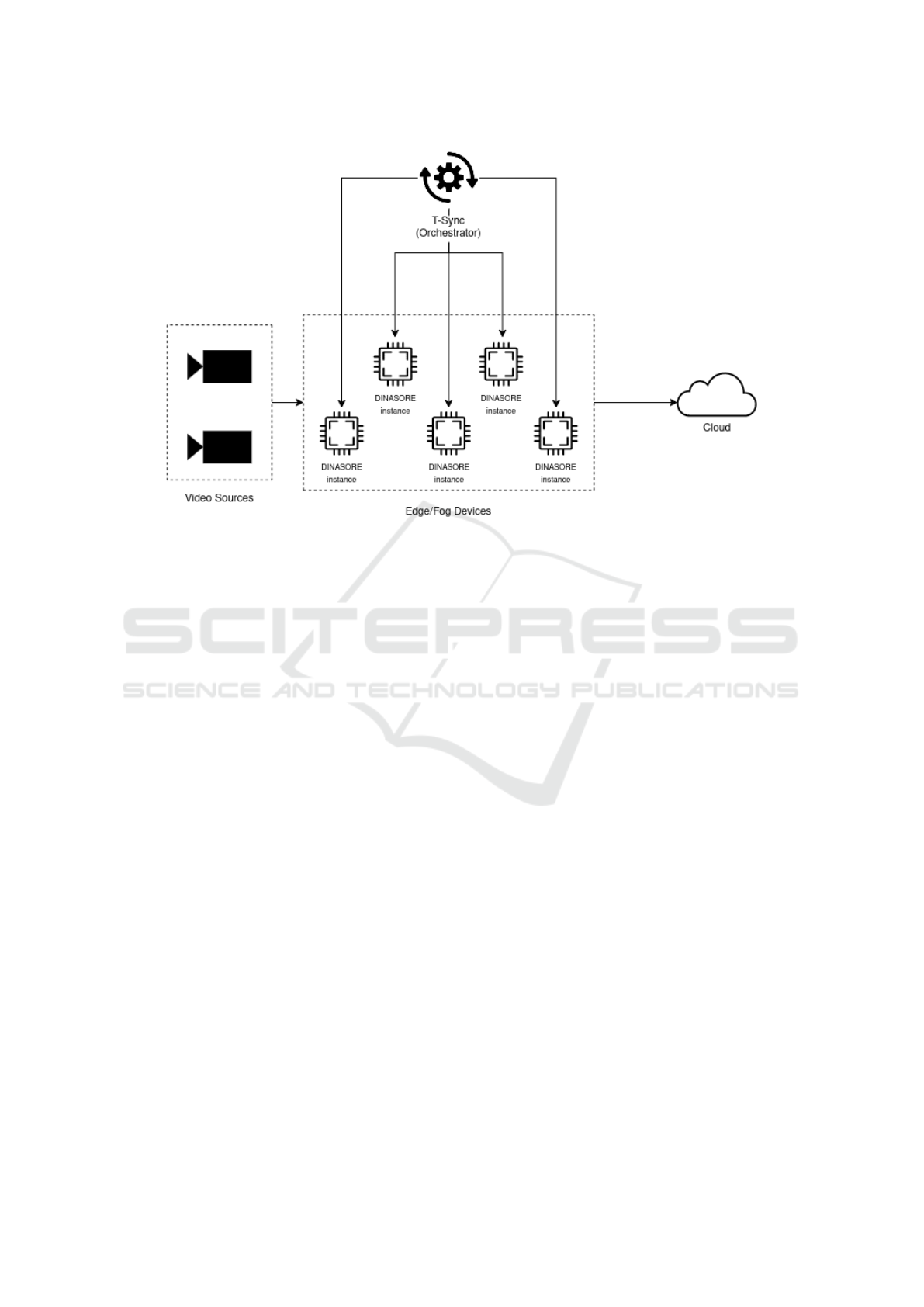
Figure 1: High-level diagram of system architecture.
(Pereira and Gonc¸alves, 2025). It integrates with DI-
NASORE to facilitate dynamic reconfiguration of Cy-
ber Physical Production Systems (CPPS) by imple-
menting a resource optimization algorithm that per-
forms optimal FB assignment across available de-
vices. T-Sync continuously monitors system per-
formance through metrics collection, and uses the
TREAO genetic algorithm to determine optimal task
placement, and automatically deploys new configura-
tions when improvements are identified (Pereira et al.,
2024).
Together with DINASORE, T-Sync addresses the
challenge of efficient resource utilization and system
reconfiguration by providing automated, optimized
distribution of computational tasks across networked
devices while maintaining compliance with industrial
standards.
3 IMPLEMENTATION
Continuing with the previous Bosch Ovar example,
we assume a scenario in which cameras capture im-
ages of the factory floor, and edge devices that belong
to the system perform the pre-processing to remove
sensitive, personal information.
To mitigate the raised issues we propose an ar-
chitecture that is based on the IEC 61499 industrial
standard. This standard focuses on function blocks
and their importance in outlining industrial processes,
while also being centred around an event-driven exe-
cution model.
The proposed architecture would be triggered by
events, e.g. the detection of a person, the addition
of a new processing device or camera to the system,
or removal/failure of other nodes and cameras. The
infrastructure is assumed to be observable, in other
words, when a change in topology occurs, there will
be an event notifying such behaviour. As a conse-
quence, the proposed architecture will have an orches-
trator logic, performed by T-Sync, which will receive
the updates and delegate tasks accordingly.
3.1 Architecture Design
The initial requirements for the design on the archi-
tecture is that it be decentralized, adaptable, event-
driven, fault tolerant and scalable.
Figure 1 illustrates the high-level diagram for the
proposed architecture. In it, there are four main com-
ponents, i.e. the video sources, the edge/fog devices,
the orchestrator and the cloud. The video sources gen-
erate and transmit the images via Real-Time Stream-
ing Protocol (RTSP).
The cameras communicate directly with the
edge/fog devices and, in turn, these devices commu-
nicate with the cloud; however, there is no communi-
cation between each device within the edge and fog
layer. Instead, the orchestrator tells which device
what to do. This design choice avoids the complex-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
520
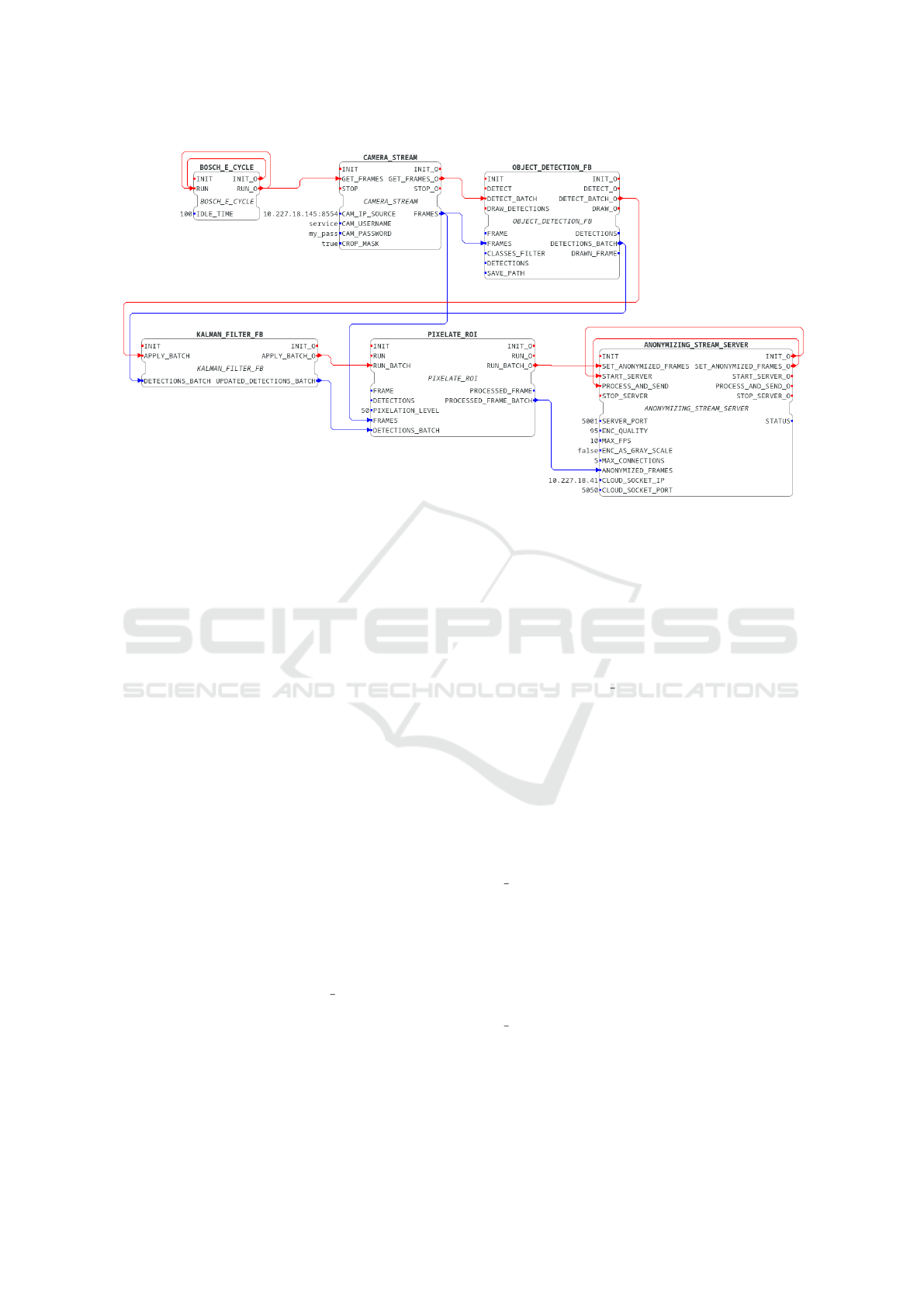
Figure 2: Complete Function Block Anonymization Pipeline.
ity of peer-to-peer communication and simplifies fault
detection and task reassignment.
Furthermore, it is assumed that the orchestrator is
aware of any topology changes within the network.
Since the primary focus of this research is on the ar-
chitectural design, the mechanisms for network dis-
covery and monitoring are considered out of scope.
3.2 Development
The architecture centres on the IEC 61499 standard,
using the Function Block (FB) as basis. As a result,
the development starts by creating the function blocks
most relevant to the problem at hand.
In order to anonymize images, for each frame, the
following sequence must occur: (1) capture the video
frame, (2) identify and locate any humans, (3) apply
a filter for detection stability, (4) pixelate regions of
interest and, lastly, (5) transmit the frame through a
server socket accessible to the cloud. With this pro-
cess limited to the edge and fog boundaries, it’s guar-
anteed that personal information never reaches cen-
tralized storages.
For each stage of the sequence, a function block
was created, in addition to an E CYCLE function
block, which polls the cameras for frames every N
seconds. The creation of function blocks means the
creation of a XML file with the specified input/output
variables and events, and a Python file in containing
the logic to be executed for each event. This format
is required because of integration with 4Diac and DI-
NASORE.
With each function block created, the whole pro-
cess must be plotted out in 4Diac, attaching each
function block to each other. This is illustrated in Fig-
ure 2.
Once the anonymisation pipeline is modelled in
4Diac, the XML description is handed off to T-Sync,
which keeps a static record of the available process-
ing devices, the dev specs.json file. On start-up,
T-Sync parses this file and, together with the 4Diac
application XML, produces a single placement plan,
pushing it to the processing devices which should be
running DINASORE. The task allocation is handled
by TREAO, as previously mentioned.
From that moment onward, the orchestrator would
redeploy the task configuration if a timeout was
reached (an option offered by T-Sync). If a pro-
cessing device failed or a new camera was installed,
there had to be a manual intervention to change the
dev specs.json, followed by a T-Sync restart to
bring the change into effect.
As the intent is to make this architecture adap-
tive, this was a flaw that needed to be addressed.
To achieve this, a Python script was added to the
execution of T-Sync. The Python script receives
changes from the network, which are always as-
sumed to be truthful and correct, and changes the
dev specs.json file accordingly, updating it during
the T-Sync runtime. In addition, a flag is raised when-
ever this file is altered, then when T-Sync sees the flag
change, it re-runs the task allocation algorithm, with
the new device details, and re-deploys the new tasks.
Taken together, these design and implementation
Leveraging Edge and Fog Resources While Complying with EU’s GDPR
521
steps tackle the original aims of the project. Process-
ing remains close to the cameras, and the system re-
organises itself whenever devices appear, fail, or are
upgraded.
4 EVALUATION
To assess the architecture’s robustness and perfor-
mance, we evaluated the following metrics, as defined
more precisely below: (1) MTTR (Mean Time To Re-
cover), (2) Data Loss Rate, (3) End-to-end latency, (4)
Frame processing rate, (5) CPU usage and (6) Mem-
ory usage. This set of criteria will give us a robust
insight as to the performance of the developed archi-
tecture in the face of different challenges and situa-
tions.
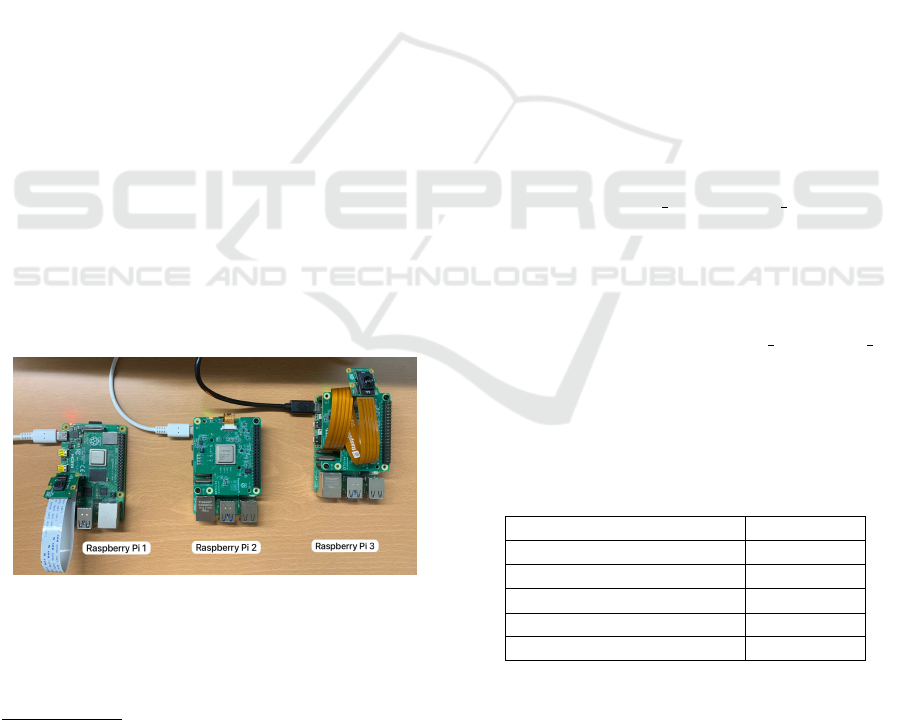
4.1 Experimental Setup
For this evaluation a testbed with the following com-
puting platforms and cameras was setup, as shown on
Figure 3, thus including a total of three processing de-
vices and two cameras.
1. Raspberry Pi 4 Model B (2 GB RAM)
1
with Rasp-
berry Pi Camera Module 2
2
2. Raspberry Pi 5 (16 GB RAM)
3
with Raspberry Pi
AI HAT+ (26 TOPS)
4
3. Raspberry Pi 5 (16 GB RAM)
3
with Raspberry Pi
AI HAT+ (13 TOPS)
4
and Raspberry Pi AI Cam-
era
5
Figure 3: Raspberry Pi evaluation testbed.
1
Raspberry Pi 4 Model B product page
2
Raspberry Pi Camera Module 2 product page
3
Raspberry Pi 5 product page
4
Raspberry Pi AI HAT+ product page
5
Raspberry Pi AI Camera product page
4.2 Empirical Evaluation
To evaluate the performance of the proposed approach
4 different types of experiments were conducted. All
experiments share the same hardware pipeline, yet the
relevance of each metric differs with the goal of the
test.
4.2.1 Baseline Performance Test
For this test we conducted a controlled experiment
with no disruptions, which aims to capture the sys-
tem’s default behaviour under standard operation con-
ditions. This will serve as the benchmark for later
comparisons. The experiment used the 3 Raspberry
Pis and 2 cameras (each at 10 FPS) all throughout,
operating uninterrupted for four minutes.
Four metrics stand out for this test: (1) End-to-
end latency provides the reference QoS level under
typical load; (2) Frame processing rate determines
the rate at which the system operates; (3) Data loss
rate gives insight as to the baseline losses for fur-
ther comparison; (4) CPU/Memory usage captures
the steady-state resource footprint, used to determine
computing overloads.
Table 1 details the acquired metrics for the base-
line test. The measured end-to-end latency of 3.4
seconds, with OBJECT DETECTION FB dominates
the computation budget, requiring on average 3.124 ±
2.629 seconds to analyse one frame. The system pro-
cesses only 0.62 frames per second while both cam-
eras supply the video feed at 10 FPS. Accordingly,
about 94% of frames are discarded. The bottleneck
is unequivocally caused by OBJECT DETECTION FB,
which accounts for almost all the computational bud-
get. The standard deviation highlights the discrepancy
between devices with hardware accelerators (Rasp-
berry Pi 2 and 3) and those without (Raspberry Pi 1).
Table 1: Average captured metrics for baseline test across
all devices.
Metric Value
Frames captured 2 728
Frames streamed 156
Frame processing rate (s
-1
) 0.62
Data loss rate (%) 94.3
End-to-end latency ±σ (s) 3.42 ± 0.30
Despite the backlog, processor utilisation re-
mained below 0.2% on all devices, an indication that
the workload is overwhelmingly I/O-bounded rather
than CPU-bounded.
As a whole, the baseline experiments revealed a
system whose latency is constrained by the processing
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
522
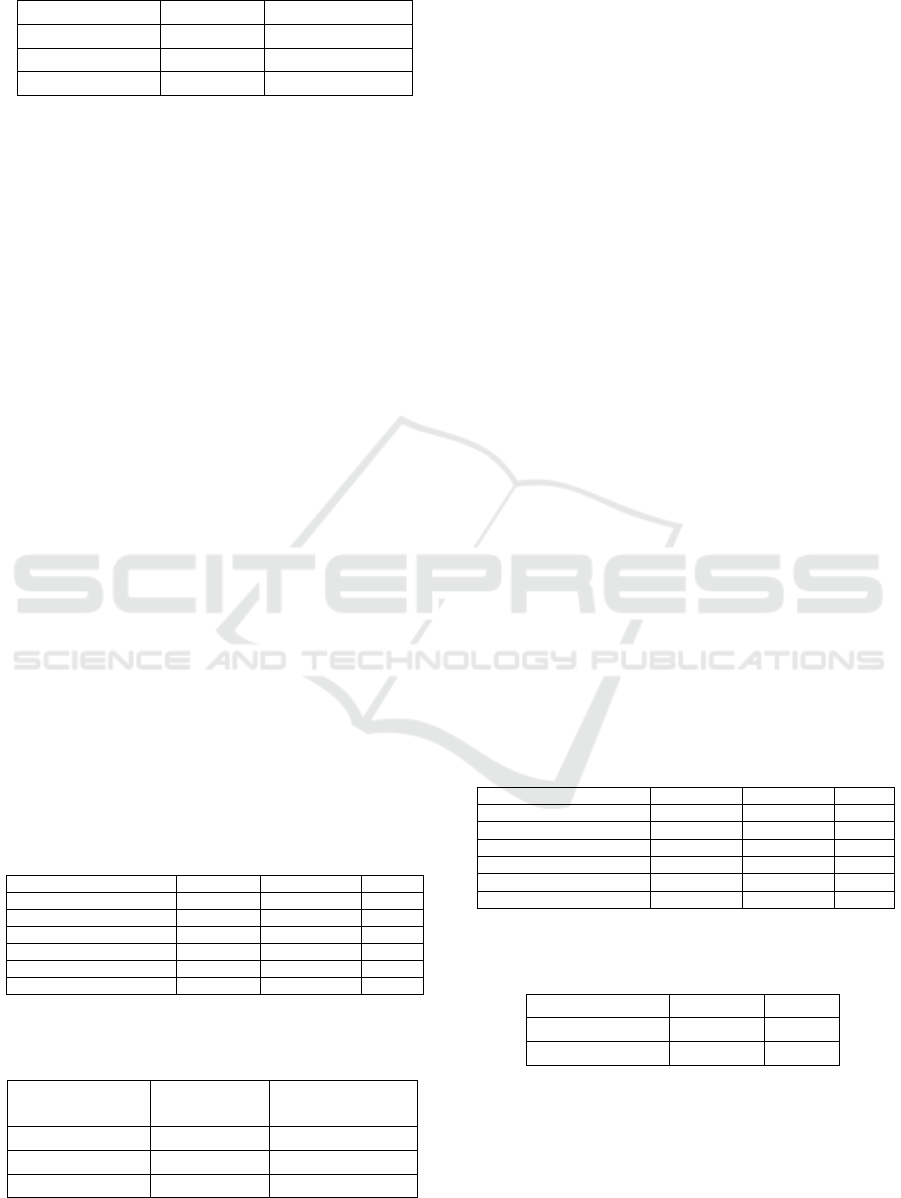
Table 2: Average CPU and memory usage per device for
baseline test.
Device CPU (%) Memory (MB)
Raspberry Pi 1 0.105 % 114
Raspberry Pi 2 0.047 % 72
Raspberry Pi 3 0.020 % 147
rate of the miscellaneous devices, even when some are
equipped with hardware accelerators.
4.2.2 Failure Tests
Regarding the failure tests, the setup is identical to
the set up used for the baseline test. In this case, the
system starts with the 3 Raspberry Pis and 2 cameras,
after which 2 devices and 1 camera were disconnected
from the system, leaving a single Raspberry Pi and
camera. In this case, Raspberry Pi #2 and the camera
attached to Raspberry Pi #3 were the sole survivors.
For this test, the relevant metrics are: (1) MTTR
which measures the speed at which the system can
recover to gauge behaviour in the face of failures;
(2) End-to-end latency which analyzes latency un-
der failures to determine possible behaviour changes;
(3) Data loss rate to understand the amount of data
lost, compared to the baseline, during a failure; (4)
CPU/Memory usage to verify if during failures de-
vices become overwhelmed.
For analysis, the logs were partitioned into two
segments, pre-fault and post-recovery. Each stage
lasted about a minute, not including recovery time.
The results are shown on table 3. The first deployment
starts at 0.00 seconds, the topology-change event is
recorded at 56.82 seconds, and normal service re-
sumes with a second deployment at 99.86 seconds.
The difference between the latter two timestamps is
43 seconds, which is the MTTR for this run.
Table 3: System performance before and after recovery dur-
ing failure test.
Pre-fault Post-recovery ∆
Duration (s) 56.82 55.85 -
Frames captured 648 448 -30.9%
Frames streamed 46 77 +67.4%
Processing rate 0.81 1.38 +70.3%
Data-loss rate (%) 92.9 82.8 -10.1%
End-to-end latency ±σ (s) 5.27± 2.22 0.80 ± 0.07 -84.8%
Table 4: Average CPU and memory usage during failure
test.
CPU (%) Memory (MB)
Device Pre Post Pre Post
Raspberry Pi 1 0.62 - 112 -
Raspberry Pi 2 0.03 0.05 69 155
Raspberry Pi 3 0.01 - 146 -
After recovery, the system seems to improve.
Throughput rises by 70 %, losses shrink by 10%, and
the end-to-end latency drops from 5.3 to 0.8 seconds.
This accentuated drop could be credited to the pro-
cessing capacity of the device Raspberry Pi 2, which
benefits from hardware acceleration. CPU usage re-
mains below 1 % in all periods.
This test shows that the system can recover from
drops in operation, returning to a healthy state, with-
out needing manual intervention. Nonetheless, during
the recovery period, at most 430 frames were lost (43
seconds × 10 FPS), which is a period long enough to
miss critical footage.
4.2.3 Stress and Load Test
The stress test looks to put high pressure on the sys-
tem, to understand its limitations. In this scenario,
a single processing device (Raspberry Pi #3) collects
and processes frames from both cameras while they
run at their maximum FPS, 50 and 60, respectively,
for Raspberry Pi Camera Module 3 and Raspberry Pi
AI Camera. The trace covers 2 minutes of continuous
operation without topology changes.
For this test, the focus is on the following metrics:
(1) Frame processing rate evaluates frame process-
ing rate when system has an overflow of incoming
data; (2) End-to-end latency tests latency variation
under stressful scenarios; (3) Data-loss ratio, a high
loss under stress indicates frames are being dropped
because of the saturation; (4) CPU/Memory usage
highlight whether an inflow of information overloads
processing.
Table 5: Average captured metrics for baseline and stress
tests.
Baseline Stress ∆
Duration ±σ (s) 252.0 ± 1.11 120.9± 1.19 –
Frames captured 2 728 1 359 –
Frames streamed 156 70 –
Frame processing rate 0.62 0.58 –6.2%
Data-loss ratio (%) 94.3 94.8 +0.5%
End-to-end latency ±σ (s) 3.42 ± 0.30 6.93± 0.42 +103%
Table 6: Average CPU and memory usage on Raspberry Pi
3 during stress test.
Baseline Stress
CPU (%) 0.020 0.035
Memory (MB) 147 183
As per the statistics shown on Table 5, compared
to the baseline test, the end-to-end latency is much
higher, and the frame processing rate also lowers. The
data loss ratio is a bit higher, at 95 %. Object detec-
tion remains the dominant compute stage, but its av-
Leveraging Edge and Fog Resources While Complying with EU’s GDPR
523
erage time rises slightly under stress. The pure com-
pute budget under stress conditions increases slightly.
CPU usage on Raspberry Pi 3 rises marginally from
0.02 % to 0.04 %, confirming that the workload is
heavily I/O-bound.
The stress test demonstrates that simply increas-
ing camera frame-rates cannot improve analytic fresh-
ness. Higher ingress only inflates latency and main-
tains the same loss ratio.
4.2.4 Dynamic Topology Test
The topology test runs over twelve minutes and pro-
duces a sequence of seven fault-recovery cycles. Each
cycle consists of a topology change (addition or re-
moval of cameras/devices) followed by a new deploy-
ment. The following timeline of events was repro-
duced: (1) Begin with 1 Raspberry Pi (RPi 1; 0 cam-
eras); (2) Add 1 camera (RPi 1; 1 camera); (3) Add 1
Raspberry Pi (RPi 1 + RPi 3; 1 camera); (4) Remove
1 Raspberry Pi (RPi 3; 1 camera); (5) Add 1 cam-
era (RPi 3; 2 cameras); (6) Add 1 Raspberry Pi (RPi
2 + RPi 3; 2 cameras); (7) Remove 1 camera (RPi
2 + RPi 3; 1 camera); (8) Add 1 Raspberry Pi and 1
camera (RPi 1 + RPi 2 + RPi 3; 2 cameras).
As the focus for this test is the tolerance and adapt-
ability of the system, only two metrics are analysed:
(1) MTTR measures how quickly redeployments oc-
cur and how topology changes affect these values; (2)
CPU/Memory usage ensures recovery actions do not
overload nodes.
Table 7: MTTR for each cycle during topology test.
Cycle MTTR (s)
1 41.49
2 44.56
3 41.22
4 41.72
5 73.29
6 71.84
7 43.88
Mean 51.1
Table 8: Mean CPU and memory usage during topology
test.
Device CPU (%) Memory (MB)
Raspberry Pi 1 1.52 126
Raspberry Pi 2 0.04 218
Raspberry Pi 3 0.02 167
As Table 7 shows, recovery time remains almost
constant across the seven fault-recovery cycles, with
an average of 51 seconds. The orchestrator runs on
an independent, separate machine, and these mea-
surements confirm that deployment overhead does not
balloon as the system grows. Most of the compute
time is taken up by the task optimization (TREAO)
algorithm.
Despite enduring seven rapid-fire topology
changes, the system never fails to return to a steady
operating state. No cascade of errors, resource
exhaustion, or dead-letter queues appears in the
logs, and CPU utilisation never spikes above 2%,
indicating that tasks remain well within the system’s
capabilities.
4.3 System Analysis
Test results show the architecture keeps images
anonymised at the edge, successfully recovers from
node or camera loss, and stays within CPU, memory,
and network capacity constraints.
Under baseline conditions, the system demon-
strated stable behaviour, while resource usage re-
mained within the constraints of the deployed hard-
ware. The failure, stress and topology tests further
confirmed the system’s reliability and consistency.
The ability to sustain acceptable performance levels
even in partial failure scenarios strengthens the claim
that decentralization can increase resilience in real-
world industrial systems.
The solution, however, lacks when using hardware
that has a lower processing capacity, especially dur-
ing heavy computational tasks, i.e. human detection.
The architecture, although successful, should utilize
more robust devices with better capabilities, if there
is a high concern for fast anonymization and low data
loss rate.
5 CONCLUSION AND FUTURE
WORK
This paper described a privacy-first edge/fog architec-
ture, built on IEC 61499 Function Blocks, that can
support high-resolution video streaming while being
GDPR-compliant. Experimental results under nom-
inal, failure, burst-load and dynamic-topology con-
ditions reveal that the processing pipelines exhibit a
latency below real-time thresholds requirements and
can re-deploy in under a minute after device loss,
while staying within the CPU and memory budgets
of single-board computers. This proves that moving
computation closer to the factory floor, through the
utilization of edge and fog computing, helps protect
personal data and reduces the amount of traffic sent
over the network.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
524

Nevertheless, the experimental results also reveal
some limitations as heavy computer-vision workloads
can overwhelm the Raspberry Pis if no AI accelerator
is available, raising data-loss ratios. Furthermore, de-
ployments that demand higher frame rates or faster
recovery should thus pair the architecture with more
capable edge hardware.
In addition, the approach described here could still
benefit from future research. For example, integrat-
ing native network-discovery and priority-aware re-
deployment would let the orchestrator distinguish ur-
gent failures (which risk privacy or data complete-
ness) from benign additions that can be scheduled
during quieter periods.
In summary, we have shown that it is possible to
develop an edge/fog architecture that is fault-tolerant
and prioritizes GDPR data-minimisation. It is sup-
ported by tools already familiar to industrial con-
trol engineers, while still allowing for future perfor-
mance/feature enhancement, thus providing a solid
foundation for privacy-aware, real-time analytics in
future Industry 4.0 deployments.
ACKNOWLEDGEMENTS
This work was partially funded by the project “Sen-
sitive Industry”, nr. 182852, co-financed by Op-
erational Programme for Competitiveness and Inter-
nationalization (COMPETE 2020), through national
funds.
REFERENCES
Bonomi, F. and Milito, R. (2012). Fog Computing and its
Role in the Internet of Things. Proceedings of the
MCC workshop on Mobile Cloud Computing.
Dinh-Tuan, H., Beierle, F., and Garzon, S. R. (2019).
MAIA: A Microservices-based Architecture for In-
dustrial Data Analytics. In 2019 IEEE Interna-
tional Conference on Industrial Cyber Physical Sys-
tems (ICPS), pages 23–30.
Eclipse Foundation (2024). Eclipse 4diac IDE. https:
//eclipse.dev/4diac/4diac ide/. Accessed: 2025-06-02.
Etemadi, M., Ghobaei-Arani, M., and Shahidinejad, A.
(2020). Resource provisioning for IoT services in the
fog computing environment: An autonomic approach.
Computer Communications, 161:109–131.
European Parliament and Council of the European Union
(2025). Regulation (EU) 2016/679 of the European
Parliament and of the Council.
Hu, M., Guo, Z., Wen, H., Wang, Z., Xu, B., Xu, J.,
and Peng, K. (2024). Collaborative Deployment and
Routing of Industrial Microservices in Smart Fac-
tories. IEEE Transactions on Industrial Informat-
ics, 20(11):12758–12770. Conference Name: IEEE
Transactions on Industrial Informatics.
Jeschke, S., Brecher, C., Song, H., and Rawat, D. B. (2017).
Industrial Internet of Things. Springer, First edition.
Liu, W., Huang, G., Zheng, A., and Liu, J. (2020). Research
on the optimization of IIoT data processing latency.
Computer Communications, 151:290–298.
Mahmud, R., Kotagiri, R., and Buyya, R. (2018). Fog Com-
puting: A Taxonomy, Survey and Future Directions.
In Di Martino, B., Li, K.-C., Yang, L. T., and Espos-
ito, A., editors, Internet of Everything: Algorithms,
Methodologies, Technologies and Perspectives, pages
103–130. Springer, Singapore.
Murugesan, S. (2016). Fog computing: Helping the internet
of things realize its potential. Computer, pages 112–
116.
Pereira, E. and Gonc¸alves, G. (2025). Online task as-
signment optimization in reconfigurable iec 61499-
based cyber-physical production systems. TechRxiv.
Preprint.
Pereira, E., Reis, J., and Gonc¸alves, G. (2020). Dinasore:
A dynamic intelligent reconfiguration tool for cyber-
physical production systems. In Eclipse Conference
on Security, Artificial Intelligence, and Modeling for
the Next Generation Internet of Things (Eclipse SAM
IoT), pages 63–71.
Pereira, E., Reis, J., Rossetti, R. J. F., and Gonc¸alves, G.
(2024). A zero-shot learning approach for task allo-
cation optimization in cyber-physical systems. IEEE
Transactions on Industrial Cyber-Physical Systems,
2:90–97.
Torvekar, N. and Game, P. S. (2019). Microservices and its
applications: An overview. International Journal of
Computer Sciences and Engineering, 7(4):803–809.
Accessed: 2024-12-13.
Vural, H., Koyuncu, M., and Guney, S. (2017). A system-
atic literature review on microservices. In Interna-
tional Conference on Computational Science and Its
Applications (ICCSA 2017), volume 10409 of Lecture
Notes in Computer Science, pages 203–217. Springer,
Cham. Accessed: 2024-12-13.
Vyatkin, V. (2016). IEC 61499 Function Blocks for Embed-
ded and Distributed Control Systems Design. Interna-
tional Society of Automation, Research Triangle Park,
NC, USA, 3 edition.
Xu, L. D., He, W., and Li, S. (2014). Internet of things
in industries: A survey. IEEE TRANSACTIONS ON
INDUSTRIAL INFORMATICS, VOL. 10, NO. 4, pages
2233–2243.
Leveraging Edge and Fog Resources While Complying with EU’s GDPR
525
