
Balancing Speed and Accuracy: A Comparative Analysis of Segment
Anything-Based Models for Robotic Indoor Semantic Mapping
Bruno Georgevich Ferreira
1,2,3,4 a
, Armando Jorge Sousa
1,2 b
and Luis Paulo Reis
1,3 c
1
FEUP - Faculty of Engineering of the University of Porto, Porto, Portugal
2
INESC TEC - INESC Technology and Science, Porto, Portugal
3
LIACC - Artificial Intelligence and Computer Science Laboratory, Porto, Portugal
4
Edge Innovation Center, Federal University of Alagoas, Macei
´
o, Brazil
Keywords:
Semantic Segmentation, Robotic Indoor Mapping, Semantic Mapping, Segment Anything Model (SAM),
Performance Evaluation, Computer Vision, FastSAM, SAM2, MobileSAM.
Abstract:
Semantic segmentation is a relevant process for creating the rich semantic maps required for indoor navigation
by autonomous robots. While foundation models like Segment Anything Model (SAM) have significantly
advanced the field by enabling object segmentation without prior references, selecting an efficient variant for
real-time robotics applications remains a challenge due to the trade-off between performance and accuracy.
This paper evaluates three such variants — FastSAM, MobileSAM, and SAM 2 — comparing their speed
and accuracy to determine their suitability for semantic mapping tasks. The models were assessed within the
Robot@VirtualHome dataset across 30 distinct scenes, with performance quantified using Frames Per Second
(FPS), Precision, Recall, and an Over-Segmentation metric, which quantifies the fragmentation of an object
into multiple masks, preventing high quality semantic segmentation. The results reveal distinct performance
profiles: FastSAM achieves the highest speed but exhibits poor precision and significant mask fragmentation.
Conversely, SAM 2 provides the highest precision but is computationally intensive for real-time applications.
MobileSAM emerges as the most balanced model, delivering high recall, good precision, and viable processing
speed, with minimal over-segmentation. We conclude that MobileSAM offers the most effective trade-off
between segmentation quality and efficiency, making it a good candidate for indoor semantic mapping in
robotics.
1 INTRODUCTION
Semantic segmentation is the process of labelling
each pixel in an image with a class. It is a funda-
mental problem in computer vision that provides a
detailed, pixel-level understanding of a scene (Guo
et al., 2018), which is critical for a wide range of ap-
plications, from medical image analysis (Syam et al.,
2023; Osei et al., 2023) and autonomous driving (Lian
et al., 2025) to agriculture (Luo et al., 2024), re-
mote sensing (Huang et al., 2024), and infrastruc-
ture inspection (Wang et al., 2022). In the domain of
robotics and autonomous systems, semantic segmen-
tation is particularly crucial as it enables the creation
of rich, machine-readable representations of the en-
a
https://orcid.org/0000-0003-1345-5103
b
https://orcid.org/0000-0002-0317-4714
c
https://orcid.org/0000-0002-4709-1718
vironment, commonly known as semantic maps (Liu
et al., 2025). These maps enhance a robot’s ability to
navigate, interact with its surroundings, and perform
complex tasks.
The field has seen rapid evolution, moving from
traditional methods to deep learning architectures,
which have become the state-of-the-art (Guo et al.,
2018; Sohail et al., 2022). The landscape of deep
learning models for semantic segmentation is diverse,
encompassing architectures based on Convolutional
Neural Networks (CNNs) and more recently, Vision
Transformers (ViTs) and their variants (Sohail et al.,
2022; Thisanke et al., 2023). The choice of a spe-
cific model involves a critical trade-off between detec-
tion quality, computational efficiency, and suitability
for a given application domain (Broni-Bediako et al.,
2023). While numerous studies have compared these
models, they often focus on specific domains such as
remote sensing (Dahal et al., 2025) or medical imag-
Ferreira, B. G., Sousa, A. J. and Reis, L. P.
Balancing Speed and Accuracy: A Comparative Analysis of Segment Anything-Based Models for Robotic Indoor Semantic Mapping.
DOI: 10.5220/0013778500003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 321-328
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
321

ing (Pak et al., 2024). A comparative analysis within a
controlled, simulated robotic environment is essential
for evaluating model performance for indoor semantic
mapping tasks.
Recent advancements have been marked by the
rise of important foundation models, most notably
the Segment Anything Model (SAM), which offers
remarkable zero-shot generalization (Kirillov et al.,
2023; Zhao et al., 2023). These models, pretrained
on massive datasets, can segment objects and scenes
without task-specific training, presenting a new ap-
proach. Modern approaches now focus on leveraging
these capabilities for semantic mapping by adapting
them for specific domains (Cheng et al., 2025), in-
tegrating them into multimodel systems for real-time
tracking in dynamic environments (Khajarian et al.,
2025), and using them to power semi-automated an-
notation pipelines that dramatically accelerate the cre-
ation of high-quality datasets (He et al., 2025; Lian
et al., 2025). Efforts are also underway to make these
large models more efficient for real-world deploy-
ment on edge devices, leading to lightweight variants
like FastSAM and MobileSAM (Zhao et al., 2023;
Zhang et al., 2023), and to extend their capabilities
to new modalities like video with the introduction of
SAM 2 (Ravi et al., 2024).
For instance, while ViTs may excel in some do-
mains, CNNs have been shown to be more effec-
tive or efficient in others, such as in specific surgical
tasks (Pak et al., 2024). Similarly, in the context of
medical imaging, CNNs have also demonstrated su-
perior performance (Osei et al., 2023). This high-
lights an interesting gap, where the performance of a
given model is deeply related with the specific charac-
teristics of the application domain and by the dataset
used for evaluation. Therefore, direct empirical eval-
uation is necessary to determine the most suitable
model for a specific use case.
This paper addresses this gap by presenting a
comparative analysis of the performance and de-
tection quality of three distinct semantic segmenta-
tion models: FastSAM (Zhao et al., 2023), Mo-
bileSAM (Zhang et al., 2023), and SAM 2 (Ravi
et al., 2024). The evaluation is conducted specif-
ically within the context of semantic mapping for
robotics, using the Robot@VirtualHome (Fernandez-
Chaves et al., 2022) database to ensure the findings
are relevant for indoor autonomous systems. Our con-
tribution is to provide a clear comparison between
these models that can guide the selection of semantic
segmentation models in the context of semantic map-
ping.
2 RELATED WORKS
The advent of deep learning has driven rapid evolu-
tion in the field of semantic segmentation. This sec-
tion reviews the resulting literature, focusing on ar-
chitectural paradigms, the rise of foundation models,
comparative studies, advanced methodologies, and
the application of segmentation to extract relevant in-
formation to create semantic maps.
2.1 Architectural Paradigms in
Semantic Segmentation
The progression of segmentation models began with
methods like Fully Convolutional Networks (FCNs)
and weakly supervised approaches (Guo et al., 2018;
Mo et al., 2022). For a significant period, CNNs were
predominant. Encoder-decoder architectures, such as
U-Net, excelled at generating dense, pixel-wise pre-
dictions while preserving spatial information (Zhang
et al., 2021). Other prominent CNNs, including PSP-
Net and DeepLabV3+, utilize spatial pyramid pooling
to aggregate multi-scale context (Sohail et al., 2022),
with systematic comparisons evaluating their perfor-
mance across various domains (Wang et al., 2022).
More recently, ViTs like SegFormer, Swin Trans-
former, and Mask2Former have emerged as powerful
alternatives (Thisanke et al., 2023). The self-attention
mechanism in ViTs allows for more effective model-
ing of long-range spatial dependencies compared to
the localized receptive fields of CNNs, a develop-
ment closely tracked in fields such as remote sens-
ing (Huang et al., 2024).
2.2 Comparative Analyses: CNNs
versus Transformers
The advent of ViTs prompted direct performance
comparisons with CNNs. Transformer-based models
often demonstrate superior accuracy, achieving higher
mean Intersection over Union (mIoU) scores in ap-
plications like remote sensing (Dahal et al., 2025),
medical imaging (Syam et al., 2023), watershed clas-
sification (He et al., 2025), and natural disaster as-
sessment (Asad et al., 2023). However, this supe-
riority is not universal. In specific contexts, such
as 3D brain tumor segmentation (Osei et al., 2023)
and complex robotic surgery environments (Pak et al.,
2024), established CNNs have been shown to outper-
form Transformers. These conflicting findings un-
derscore that architectural performance is highly de-
pendent on the domain, dataset, and task. A fre-
quently noted trade-off is the superior computational
efficiency (e.g., FLOPS, inference time) of CNNs for
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
322

comparable accuracy, highlighting that ViTs’ accu-
racy gains can come at a significant computational
cost (Dahal et al., 2025; Broni-Bediako et al., 2023).
2.3 Foundation Models and Advanced
Methodologies
A new paradigm has emerged with large-scale, pre-
trained foundation models like the SAM, known for
its zero-shot segmentation capabilities. Current re-
search focuses on adapting these computationally in-
tensive models for practical use. This includes creat-
ing lightweight versions like FastSAM and Mobile-
SAM for edge devices (Zhao et al., 2023; Zhang
et al., 2023), and extending capabilities to video
with models like SAM 2 (Ravi et al., 2024). These
models are being integrated into advanced frame-
works for semi-automated annotation (He et al., 2025;
Lian et al., 2025), semi-supervised learning in data-
scarce domains via pseudo-labeling (Xu et al., 2025),
and specialized tasks such as remote sensing, using
automated prompt generation (Cheng et al., 2025).
For real-time applications like AR-guided surgery,
multi-model systems are being developed that com-
bine foundation models with other specialized net-
works to balance accuracy and speed (Khajarian et al.,
2025). Other advanced methods include creating hy-
brid CNN-Transformer architectures (e.g., LETNet)
to leverage the strengths of both (Xu et al., 2022).
Concurrently, there is a growing emphasis on fair
and holistic benchmarking, moving beyond isolated
metrics to evaluate the entire pipeline’s trade-offs
between quality (mIoU) and efficiency (FPS, power
consumption) for real-world deployment (Lee et al.,
2022; Mo et al., 2022; Broni-Bediako et al., 2023).
2.4 Application in Semantic Mapping
In robotics, semantic segmentation is fundamental for
constructing detailed environmental models. For in-
stance, systems now use models like YOLOv8s-seg
to build object-level semantic maps of forests for
SLAM (Liu et al., 2025), or create vectorized maps
of traffic signs for low-cost autonomous vehicle lo-
calization (Lian et al., 2025). The development of
realistic simulators with ground-truth data, such as
Robot@VirtualHome, is critical for training and val-
idating these systems before deployment (Fernandez-
Chaves et al., 2022). This highlights that the utility
of the final semantic map is directly dependent on the
accuracy and efficiency of the underlying segmenta-
tion model, positioning our work to evaluate models
for this specific application.
3 METHODOLOGY
This section describes the experimental methodol-
ogy used to assess the performance of three semantic
segmentation models — FastSAM, MobileSAM, and
SAM 2 — within the Robot@VirtualHome dataset’s
simulated real-world environment. The methodology
includes the experimental setup, dataset details, seg-
mentation model specifications, evaluation metrics,
and hardware specifications.
3.1 Experimental Setup
To assess the efficacy of three semantic segmenta-
tion models—SAM2, FastSAM, and MobileSAM—
in realistic scenarios, they were first adapted to op-
erate within the Robot@VirtualHome simulation en-
vironment. Subsequently, the models were executed
across all 30 distinct homes available in the simulator.
The predefined ”Wandering” trajectory was selected
for model validation because it provides a sufficient
and representative path for comprehensive analysis.
This trajectory initializes a robot at a random loca-
tion, which then navigates the environment while col-
lecting data.
3.2 Dataset
The study utilizes the Robot@VirtualHome dataset,
which features 30 simulated homes designed from
real-world layouts to ensure realistic object place-
ments. For each of the approximately 16,400 data
points, the dataset provides an RGB image, a depth
image, and a ground truth segmentation mask. The
RGB images serve as the input for the models, with
the provided masks used for evaluation. Data on the
robot’s pose and from a simulated LiDAR sensor are
also included.
3.3 Semantic Segmentation Models
The research focused on efficient models to balance
performance and computational cost. The selected
models include FastSAM S (based on YOLOv8s,
68M parameters) using half-precision, MobileSAM
(9.66M parameters), and SAM2 (Hiera Tiny v2.1,
38.9M parameters).
3.4 Evaluation Metrics
Model performance was assessed using four met-
rics: Precision, Recall, Frames Per Second (FPS), and
Over-Segmentation.
Balancing Speed and Accuracy: A Comparative Analysis of Segment Anything-Based Models for Robotic Indoor Semantic Mapping
323

3.4.1 Precision
Measures the accuracy of the segmentation, penaliz-
ing false positives and fragmented masks. A higher
score is better.
Precision =
TP
TP + FP
3.4.2 Recall
Assesses the model’s ability to identify all ground
truth objects in a scene. A higher score is better.
Recall =
TP
TP + FN
3.4.3 Frames per Second (FPS)
Quantifies processing speed across the entire pipeline.
A higher value indicates better efficiency.
FPS =
Total Frames
∑
T
processing
3.4.4 Over-Segmentation
Evaluates mask fragmentation by comparing the num-
ber of predicted masks to the number of ground truth
masks. A lower value is desirable.
Over-Segmentation =
Nº Pred. Masks
Nº GT Masks
3.5 Segmentation Mapping Process
To compute the evaluation metrics, a greedy algo-
rithm was implemented to establish a one-to-one
correspondence between predicted and ground truth
masks. The matching process, illustrated in Figure 1,
is based on spatial proximity and overlap.
The procedure is as follows:
1. Centroid Calculation: The geometric centroid of
each ground truth and predicted mask is computed
to serve as a spatial reference point.
2. Distance Threshold Definition: A maximum
search radius (d
max
) is dynamically set to 30% of
the smaller image dimension (height or width) to
filter potential matches based on centroid proxim-
ity.
3. Greedy Mapping Algorithm: The core of the
process is an algorithm that iterates through each
ground truth mask to find its best match among the
available (unmapped) predicted masks. For each
ground truth mask, the following criteria are ap-
plied:
(a) Distance Filter: Only predicted masks whose
centroids are within the d
max
are considered
candidates.
(b) Intersection over Union (IoU) Filter: For the
candidates that pass the distance filter, the IoU
is calculated. Only predictions with an IoU
greater than 10% are considered, ensuring a
minimal degree of actual overlap.
(c) Combined Score Selection: For candidates that
satisfy both filters, a hybrid score is computed
to determine the best match. The score is de-
fined as:
combined score = IoU −
d
d
max
× IoU
min
where d is the distance between the centroids,
d
max
is the maximum distance threshold and
IoU
min
is the minimum overlap necessary to be
considered a candidate. The predicted mask
with the highest combined score is selected as
the best match.
This approach is considered “greedy” as it makes
the locally optimal choice for each ground truth
mask without guaranteeing a globally optimal set
of pairings.
4. Final Mapping Generation: The output of this
process is a map that links the identifier of each
ground truth mask to the identifier of its corre-
sponding predicted mask. This ensures a one-
to-one mapping, where each predicted mask can
be assigned to at most one ground truth mask.
Ground truth masks with no valid match are clas-
sified as FN, while predicted masks left unmapped
are classified as FP.
3.6 Hardware Specifications
All experiments were conducted on a dedicated sys-
tem to ensure consistency and reproducibility. The
hardware configuration consisted of an Intel Core i7-
13700K CPU, an NVIDIA GeForce RTX 4090 GPU,
and 64 GB of DDR5 RAM (5200 MT/s).
4 RESULTS AND DISCUSSION
The performance of the FastSAM, MobileSAM,
and SAM 2 models was benchmarked using the
Robot@VirtualHome dataset, focusing on relevant
metrics for real-time robotic applications. This sec-
tion presents a detailed analysis of the results, exam-
ining each metric in a dedicated subsection to under-
stand the specific strengths and weaknesses of each
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
324
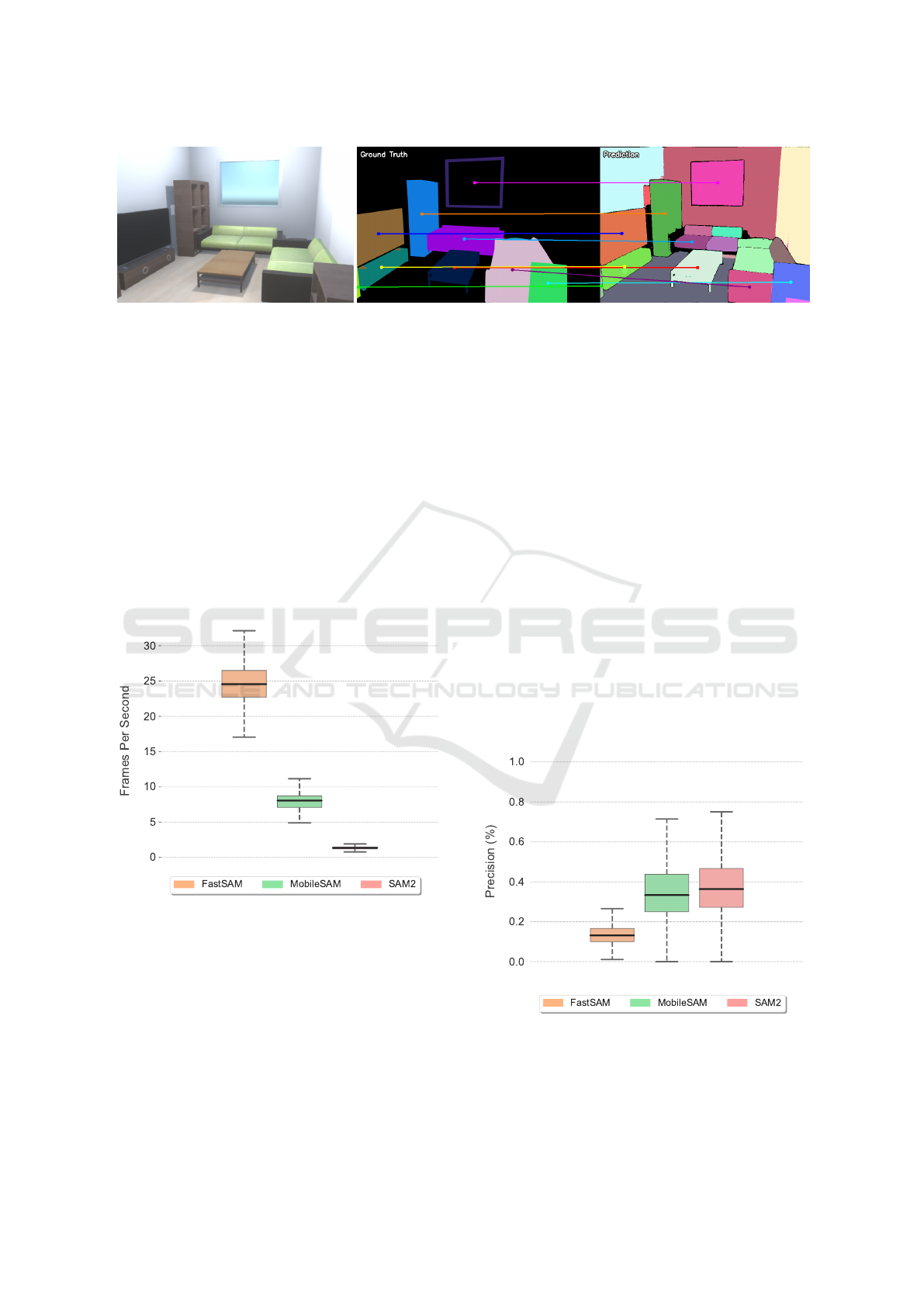
Figure 1: Comparison of ground truth segmentation with masks predicted by the SAM2 model for the Home04 scene from the
Robot@VirtualHome environment. The figure displays the original input image (left), the ground truth segmentation masks
(center), and the predicted masks (right). Colored lines connect the centroids of ground truth objects to their corresponding
predicted segments. The results demonstrate a notable instance of over-segmentation, where the model divides single ground
truth objects, such as the sofa and the wall, into multiple distinct segments.
model. The findings reveal critical trade-offs between
processing speed, detection accuracy, and mask qual-
ity.
4.1 Processing Speed (FPS)
Processing speed, measured in FPS, is paramount for
any model intended for real-time deployment on a
robotic platform. As shown in Figure 2, there are
vast differences in computational efficiency among
the evaluated models.
Figure 2: The chart illustrates the computational perfor-
mance of three models, measured in FPS. There are sig-
nificant differences in processing speed among the models.
FastSAM demonstrates the highest throughput, while Mo-
bileSAM shows a more moderate performance. In contrast,
SAM2 is considerably slower, making it less practical for
real-time applications.
FastSAM demonstrates exceptional performance,
achieving a median speed of approximately 25 FPS,
establishing it as the most computationally efficient
model by a large margin. This high throughput can
be partially attributed to its architecture and support
for half-precision processing. Following it is Mo-
bileSAM, with a more moderate but still viable me-
dian speed of around 8-9 FPS. At the opposite end
of the spectrum, SAM 2 is exceedingly slow, with
a median performance of only 1.5 FPS. This result
renders SAM 2 impractical for applications requir-
ing rapid perception of dynamic environments, while
FastSAM’s speed makes it an attractive candidate
from a purely computational standpoint.
4.2 Precision
Precision evaluates a model’s ability to generate accu-
rate segmentations without producing false positives.
This metric is critical for creating a reliable semantic
map, as low precision introduces non-existent or in-
correctly classified objects into the robot’s world rep-
resentation. The results are presented in Figure 3.
Figure 3: The box plots illustrate the distribution of pre-
cision scores, where a higher value indicates a lower rate
of false positive segmentations. SAM2 achieves the high-
est median precision, followed closely by MobileSAM. In
contrast, FastSAM shows significantly lower performance,
indicating consistently low precision.
Balancing Speed and Accuracy: A Comparative Analysis of Segment Anything-Based Models for Robotic Indoor Semantic Mapping
325
SAM 2 stands out with the highest median pre-
cision (≈ 0.37), indicating its predictions are the
most reliable among the three. MobileSAM follows
with respectable precision, showing a median in the
0.32–0.33 range. This suggests it produces relatively
clean segmentations with a low rate of false posi-
tives and over-segmentation. In the opposite direc-
tion, FastSAM exhibits a poor precision, with a me-
dian score of just 0.13. This low score is a direct
consequence of its tendency to segment large, unan-
notated areas of the scene, such as walls and floors,
and by frequently over-segment the objects which are
counted as false positives according to our evaluation
protocol.
4.3 Recall
Recall, or sensitivity, measures a model’s ability to
segment all the ground truth objects present in a
scene. High recall is essential to ensure the seman-
tic map is complete and does not miss important envi-
ronmental features. However, this metric does not ac-
count for noise and false positives. The performance
of the models on this metric is shown in Figure 4.
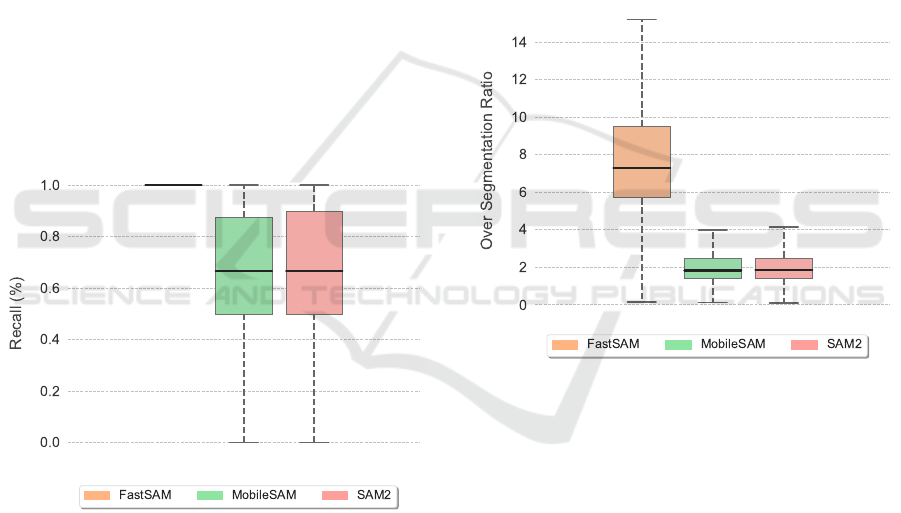
Figure 4: Recall measures a model’s ability to identify all
ground truth objects in an image. MobileSAM and SAM2
show similar performance. The wide range of scores for
these two models indicates variability in their performance
across different scenes. FastSAM achieves the highest me-
dian recall, but this high score is a consequence of the
model’s tendency to over-segment, detecting all true objects
but also generating a high number of false positives.
MobileSAM and SAM 2 achieved a similar per-
formance, sharing a median recall of approximately
0.67. This indicates a good capability to segment the
majority of objects in a given frame, which is impor-
tant for building a comprehensive map. Interestingly,
the FastSAM box plot shows a median recall of 1.0.
This seemingly perfect score is not an indicator of su-
perior performance but rather an artifact of its operat-
ing principle; by segmenting almost everything in the
image indiscriminately, it invariably covers all ground
truth objects, but at the direct and severe cost of the
low precision discussed previously.
4.4 Over-Segmentation Analysis
The over-segmentation ratio quantifies the average
number of fragments the segmentation model splits a
single real-world object mask into multiple predicted
masks. A lower ratio is highly desirable, as high frag-
mentation complicates the process of creating a co-
herent and object-centric semantic map, requiring sig-
nificant post-processing to merge segments. The re-
sults are detailed in Figure 5.
Figure 5: The over-segmentation ratio measures the aver-
age number of predicted segments generated for a single
ground-truth object, where lower values indicate better per-
formance. FastSAM shows a significantly higher median
over-segmentation ratio, indicating that it tends to exces-
sively fragment single objects into multiple segments. In
contrast, MobileSAM and SAM2 demonstrate a more stable
performance. This suggests that MobileSAM and SAM2
produce more coherent and usable segmentations with min-
imal fragmentation.
This metric reveals the most dramatic difference
between the models. FastSAM is a severe outlier,
with a median over-segmentation ratio of over 7. This
implies that for every object in the scene, FastSAM
generates, on average, more than seven distinct seg-
ments, making its output almost unusable for direct
semantic mapping without complex post-processing.
In contrast, MobileSAM and SAM 2 demonstrate
well-controlled performance, with median ratios clus-
tered around a much more manageable value of 2.
This indicates a consistent and predictable behavior
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
326

where they occasionally split an object into two seg-
ments — a far more tractable issue for any down-
stream processing pipeline.
In summary, the detailed analysis of each metric
reveals a clear trade-off. FastSAM, while extremely
fast, suffers from quality issues, particularly in preci-
sion and over-segmentation coherence. SAM 2, while
highly precise, is slow for real-time use. Mobile-
SAM consistently performs at or near the top for qual-
ity metrics (Precision and Recall) while maintaining
a moderate speed and a low over-segmentation ra-
tio, positioning it as the most balanced and pragmatic
choice for the target application.
5 CONCLUSION
This paper presented a comparative analysis of three
modern, efficient variants of the SAM — specifi-
cally FastSAM (initial reference dated 2023), Mo-
bileSAM (initial reference dated 2021), and SAM 2
(initial reference dated 2024) — for the task of in-
door semantic mapping. By leveraging the realis-
tic Robot@VirtualHome simulation environment, we
evaluated the models on key metrics of speed (FPS),
accuracy (Precision and Recall), and mask quality
(Over-Segmentation Ratio) to determine their suit-
ability for deployment on autonomous systems.
Our findings reveal a distinct trade-off profile
for each model. FastSAM operates at a remarkable
speed, making it attractive for applications with strin-
gent latency requirements. However, this velocity
comes at the cost of a low precision and a high de-
gree of mask fragmentation, rendering it unsuitable
for tasks that demand accurate and coherent object
identification. In direct contrast, SAM 2 delivers the
highest precision and a good recall, producing high-
fidelity segmentations that would be ideal for offline
map creation. Unfortunately, its low frame rate makes
it impractical for real-time scenarios where the envi-
ronment is dynamic, or the robot is in motion.
The most compelling performance for the target
application of real-time indoor semantic mapping was
delivered by MobileSAM. It strikes an effective and
pragmatic balance, providing high recall and good
precision while maintaining a processing speed that
is viable for on-the-fly robotic operations. Its low and
predictable over-segmentation ratio further solidifies
its position as a practical and reliable choice for gen-
erating semantic maps that are both comprehensive
and accurate.
1
https://github.com/CASIA-IVA-Lab/FastSAM
2
https://github.com/ChaoningZhang/MobileSAM
3
https://github.com/facebookresearch/sam2
This work contributes a clear, data-driven guide
for researchers, engineers and practitioners in select-
ing a segmentation model for robotics. We conclude
that for indoor semantic mapping, where both the ac-
curacy of the environmental representation and the
timeliness of its updates are crucial, MobileSAM cur-
rently offers the best trade-off between detection qual-
ity and computational efficiency.
Future work should aim to validate these findings
on a physical robotic platform to account for real-
world complexities not present in simulation. Fur-
ther research could also explore the development of
post-processing algorithms to merge over-segmented
regions, potentially improving the usability of faster
models like TinySAM. Finally, an analysis incorpo-
rating power consumption would provide an even
more comprehensive understanding of model effi-
ciency for deployment on battery-powered mobile
robots.
ACKNOWLEDGEMENTS
This work was partially financially supported by:
Base Funding - UIDB/00027/2020 of the Artifi-
cial Intelligence and Computer Science Laboratory
– LIACC - funded by national funds through the
FCT/MCTES (PIDDAC). This work is partially fi-
nanced by National Funds through the Portuguese
funding agency, FCT - Fundac¸
˜
ao para a Ci
ˆ
encia e
a Tecnologia, within project LA/P/0063/2020. DOI
10.54499/LA/P/0063/2020.
REFERENCES
Asad, M. H., Asim, M. M., Awan, M. N. M., and Yousaf,
M. H. (2023). Natural Disaster Damage Assessment
using Semantic Segmentation of UAV Imagery. 2023
International Conference on Robotics and Automation
in Industry, ICRAI 2023.
Broni-Bediako, C., Xia, J., and Yokoya, N. (2023). Real-
Time Semantic Segmentation: A brief survey and
comparative study in remote sensing. IEEE Geo-
science and Remote Sensing Magazine, 11:94–124.
Cheng, G., Zhao, Q., Lyu, S., Rizeei, H. M., Zhang, J., Li,
Y., Yang, X., Jiang, R., and Zhang, L. (2025). RSAM-
Seg: A SAM-Based Model with Prior Knowledge In-
tegration for Remote Sensing Image Semantic Seg-
mentation. Remote Sensing 2025, Vol. 17, Page 590,
17:590.
Dahal, A., Murad, S. A., and Rahimi, N. (2025). Heuristical
Comparison of Vision Transformers Against Convo-
lutional Neural Networks for Semantic Segmentation
on Remote Sensing Imagery. IEEE Sensors Journal,
25:17364–17373.
Balancing Speed and Accuracy: A Comparative Analysis of Segment Anything-Based Models for Robotic Indoor Semantic Mapping
327

Fernandez-Chaves, D., Ruiz-Sarmiento, J. R., Jaenal,
A., Petkov, N., and Gonzalez-Jimenez, J. (2022).
RobotVirtualHome, an ecosystem of virtual environ-
ments and tools for realistic indoor robotic simulation.
Expert Systems with Applications, 208:117970.
Guo, Y., Liu, Y., Georgiou, T., and Lew, M. S. (2018). A re-
view of semantic segmentation using deep neural net-
works. International Journal of Multimedia Informa-
tion Retrieval, 7:87–93.
He, P., Shen, T., Wang, Y., Zhu, D., Hu, Q., Li, H., Yin,
W., Zhang, Y., and Yang, A. (2025). A study on auto-
matic annotation methods for watershed environmen-
tal elements based on semantic segmentation models.
European Journal of Remote Sensing, 58.
Huang, L., Jiang, B., Lv, S., Liu, Y., and Fu, Y. (2024).
Deep-Learning-Based Semantic Segmentation of Re-
mote Sensing Images: A Survey. IEEE Journal of Se-
lected Topics in Applied Earth Observations and Re-
mote Sensing, 17:8370–8396.
Khajarian, S., Schwimmbeck, M., Holzapfel, K., Schmidt,
J., Auer, C., Remmele, S., and Amft, O. (2025). Au-
tomated multimodel segmentation and tracking for
AR-guided open liver surgery using scene-aware self-
prompting. International Journal of Computer As-
sisted Radiology and Surgery .
Kirillov, A., Mintun, E., Ravi, N., Mao, H., Rolland, C.,
Gustafson, L., Xiao, T., Whitehead, S., Berg, A. C.,
Lo, W. Y., Doll
´
ar, P., and Girshick, R. (2023). Seg-
ment Anything. Proceedings of the IEEE Interna-
tional Conference on Computer Vision, pages 3992–
4003.
Lee, M. S., Kim, M., and Jeong, C. Y. (2022). Real-time se-
mantic segmentation on edge devices: A performance
comparison of segmentation models. International
Conference on ICT Convergence, 2022-October:383–
388.
Lian, J., Chen, S., Guo, G., Sui, D., Zhao, J., and Li, L.
(2025). Lightweight semantic visual mapping and lo-
calization based on ground traffic signs. Displays, 90.
Liu, H., Xu, G., Liu, B., Li, Y., Yang, S., Tang, J., Pan,
K., and Xing, Y. (2025). A real time LiDAR-Visual-
Inertial object level semantic SLAM for forest envi-
ronments. ISPRS Journal of Photogrammetry and Re-
mote Sensing, 219:71–90.
Luo, Z., Yang, W., Yuan, Y., Gou, R., and Li, X. (2024). Se-
mantic segmentation of agricultural images: A survey.
Information Processing in Agriculture, 11:172–186.
Mo, Y., Wu, Y., Yang, X., Liu, F., and Liao, Y. (2022). Re-
view the state-of-the-art technologies of semantic seg-
mentation based on deep learning. Neurocomputing,
493:626–646.
Osei, I., Appiah-Kubi, B., Frimpong, B. K., Hayfron-
Acquah, J. B., Owusu-Agyemang, K., Ofori-Addo,
S., Turkson, R. E., and Mawuli, C. B. (2023). Multi-
modal Brain Tumor Segmentation Using Transformer
and UNET. 2023 20th International Computer Con-
ference on Wavelet Active Media Technology and In-
formation Processing, ICCWAMTIP 2023.
Pak, S., Park, S. G., Park, J., Choi, H. R., Lee, J. H., Lee,
W., Cho, S. T., Lee, Y. G., and Ahn, H. (2024). Appli-
cation of deep learning for semantic segmentation in
robotic prostatectomy: Comparison of convolutional
neural networks and visual transformers. Investigative
and clinical urology, 65:551–558.
Ravi, N., Gabeur, V., Hu, Y.-T., Hu, R., Ryali, C., Ma,
T., Khedr, H., R
¨
adle, R., Rolland, C., Gustafson, L.,
Mintun, E., Pan, J., Alwala, K. V., Carion, N., Wu,
C.-Y., Girshick, R., Doll
´
ar, P., Feichtenhofer, C., and
Fair, M. (2024). SAM 2: Segment Anything in Images
and Videos.
Sohail, A., Nawaz, N. A., Shah, A. A., Rasheed, S., Ilyas,
S., and Ehsan, M. K. (2022). A Systematic Litera-
ture Review on Machine Learning and Deep Learning
Methods for Semantic Segmentation. IEEE Access,
10:134557–134570.
Syam, R. F. K., Rachmawati, E., and Sulistiyo, M. D.
(2023). Whole-Body Bone Scan Segmentation Us-
ing SegFormer. 2023 10th International Conference
on Information Technology, Computer, and Electrical
Engineering, ICITACEE 2023, pages 419–424.
Thisanke, H., Deshan, C., Chamith, K., Seneviratne, S.,
Vidanaarachchi, R., and Herath, D. (2023). Seman-
tic segmentation using Vision Transformers: A sur-
vey. Engineering Applications of Artificial Intelli-
gence, 126.
Wang, J. J., Liu, Y. F., Nie, X., and Mo, Y. L. (2022). Deep
convolutional neural networks for semantic segmenta-
tion of cracks. Structural Control and Health Moni-
toring, 29.
Xu, G., Qian, X., Shao, H. C., Luo, J., Lu, W., and Zhang, Y.
(2025). A segment anything model-guided and match-
based semi-supervised segmentation framework for
medical imaging. Medical Physics.
Xu, Z., Guan, H., Kang, J., Lei, X., Ma, L., Yu, Y., Chen,
Y., and Li, J. (2022). Pavement crack detection from
CCD images with a locally enhanced transformer net-
work. International Journal of Applied Earth Obser-
vation and Geoinformation, 110.
Zhang, C., Han, D., Qiao, Y., Kim, J. U., Bae, S.-H., Lee,
S., and Hong, C. S. (2023). Faster Segment Anything:
Towards Lightweight SAM for Mobile Applications.
Zhang, W., Tang, P., and Zhao, L. (2021). Fast and accurate
land cover classification on medium resolution remote
sensing images using segmentation models. Interna-
tional Journal of Remote Sensing, 42:3277–3301.
Zhao, X., Ding, W., An, Y., Du, Y., Yu, T., Li, M., Tang, M.,
and Wang, J. (2023). Fast Segment Anything.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
328
