
Design Space Exploration and Performance Evaluation of a
Multi-Chamber, Multi-Curvature Soft Actuator for
Robotic Applications
Ansari Usama and Asokan Thondiyath
Department of Engineering Design, Indian Institute of Technology Madras, Chennai, 600 036, India
Keywords: Soft Actuator, Robotic Gripping, Parameter Identification, FEM.
Abstract: Soft actuators are finding wide applications in robotics due to the compliance they offer in handling delicate
objects. The design of soft actuators is challenging due to the fragile nature of the materials used and the
difficulty of fabricating them. Also, soft actuators must be designed to achieve the desired bending
performance that suits the application. This paper presents the design and analysis of a multi-chamber, multi-
curvature soft actuator for robotic gripping applications. This design combines two different configurations
to get the desired bending curvature of the actuator. Modeling of the actuator and analysis of the effect of
various design parameters on the bending angle and the tip force are presented. Prototype fabrication and
experimental results are also presented. The results confirm that it is possible to custom-design soft actuators
to meet specific performance requirements through design synthesis.
1 INTRODUCTION
Soft robots offer inherent compliance by using soft
materials and novel structures to adapt to the
surrounding environment, improving flexibility and
adaptability. They take inspiration from nature, such
as the octopus, starfish, and jellyfish. Soft robots aim
to provide safe and compliant interaction with
humans (Wu et al., 2019; Rogóż et al., 2016). Unlike
traditional robots made from rigid links, joints, or
inflexible components, soft robots are built using
flexible and stretchable materials such as silicone
rubbers, elastomers, and soft polymers, enabling them
to achieve nearly infinite degrees of freedom,
conform to various shapes and sizes, and manipulate
fragile or irregular objects (Navas et al., 2021).
Traditional robotic grippers, made from hard
materials like metal or plastic, are well suited for
high-precision, repetitive tasks in structured
environments due to their fast response, stability, and
higher payload capacity. However, their limitations
become evident in unstructured environments or tasks
requiring delicate handling, such as grasping soft,
fragile, or irregularly shaped objects (Zhang et al.,
2019; Zhang et al., 2017). In contrast, soft grippers
excel by utilizing compliant materials and bio-
inspired designs to offer safer, more adaptable
grasping solutions (Zaidi et al., 2021). The
performance of soft grippers depends strongly on the
design and bending behavior of soft actuators, which
is the focus of this paper.
Various actuation methods for soft robots have
been explored, including electroactive polymers,
cable-driven systems, shape memory alloys, material
jamming, magnetic actuation, and fluidics
(pneumatic and hydraulic) (Su et al., 2022). Among
these, pneumatic actuation is most widely adopted
due to its simplicity, low cost, light weight, high force
output, and ease of fabrication (Gariya et al., 2023).
The typical structure of a soft pneumatic actuator
(SPA) consists of an extensible top layer with
embedded air chambers and an inextensible bottom
layer. When pressurized, the chambers expand and
push against each other, causing the actuator to bend
toward the inextensible side. To guide this
deformation in a desired direction, the actuator is
designed with differing material thicknesses between
the chamber top wall and the inextensible bottom
layer (Polygerinos et al., 2015).
SPAs can be either single-chamber or multi-
chamber. Single-chamber actuators are easy to design
and fabricate but tend to show significant radial
expansion or ballooning effects under pressure,
reducing precise control and efficiency (Gariya et al.,
116
Usama, A. and Thondiyath, A.
Design Space Exploration and Performance Evaluation of a Multi-Chamber, Multi-Curvature Soft Actuator for Robotic Applications.
DOI: 10.5220/0013777000003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 116-127
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

2023; Ariyano et al., 2019). Fiber reinforcement was
introduced to overcome ballooning and enable
directional bending by constraining deformation
(Soft Robotics Toolkit, n.d.; Hu et al., 2018). Multi-
chamber designs were introduced to overcome the
difficulties with single-chamber actuators. A multi-
cavity soft pneumatic actuator was developed in (Lei
et al., 2022), and a theoretical model linking input
pressure to bending deformation was proposed.
Although the actuator demonstrated good flexibility,
it was limited to a fixed single-curvature
configuration. A structurally optimized multi-
chamber soft actuator was proposed in (Hu et al.,
2018), but it produces single-curvature bending.
There were multiple approaches in the design of
multi-chamber actuators through segmented control
(Yang et al., 2020), multi-composite structures
(Huang et al., 2021), and slow and fast pneumatic
networks (sPN/fPN) (Mosadegh et al., 2014). These
works demonstrate continued progress in improving
actuation performance and structural optimization,
yet most remain limited to single-curvature, single-
configuration outputs. Such actuators are unsuitable
for many robotic grasping applications because they
struggle to conform to irregular shapes or delicate
objects, point contact at the actuator tip, have limited
surface conformability, and the contact force
generated is less uniform (Tang et al., 2022). (Song et
al. 2021) achieved multi-curvature deformation by
dividing the multi-chamber actuator into several
chamber groups and actuating those selectively using
independent pressure channels. This enabled
programmable deformation patterns and improved
dexterity but required complex multi-channel
pneumatic control, increasing system-level
complexity.
Building on our earlier work (Ansari et al., 2025),
this paper proposes a multi-chamber, multi-curvature
bending profile soft actuator using a multi-curvature
design and a single pneumatic channel. The actuator
also integrates an adhesion mechanism to improve
further grasping stability and adaptability.
Performance metrics, including taper optimization,
contact uniformity, and object compatibility, are
evaluated through numerical simulations and
parametric studies, demonstrating advantages of this
approach over conventional single curvature designs.
The remainder of the paper is organised as
follows: Section 2 provides Methodology, Section 3
explains Parametric Study, Section 4 provides Bio-
mimicry in Soft Actuator Design with Suckers,
Section 5 provides Simulation Studies, Section 6
includes Prototyping and Testing, Section 7 Actuator
Testing for Grasping, and Section 8 provides
Conclusion and future work, followed by References.
2 METHODOLOGY
The design of the soft actuator is achieved by
combining design configurations of air chambers, as
shown in Figure 1. The series arrangement of
Configuration B–C–A is inspired by the work of
(Ansari et al. 2025), while Configurations A and B
are based on (Mosadegh et al. 2014), and
Configuration C draws inspiration from (Yang et al.
2020).
Figure 1: Sectional view of SPA for Configuration B, C, A.
Referring to Figure 1, Configuration A has no gap
between chambers, which leads to high stiffness and
limited bending. Configuration B has gaps present but
chambers are attached to the bottom plate, which
slows bending. In contrast, in Configuration C, the
chambers are detached from the bottom plate, leading
to fast, less restricted bending.
Therefore, the proposed design combines
Configurations B and C, with seven chambers for
Configuration B and five for Configuration C, as
shown in Figure 2. Figure 3 shows the cross-sectional
view of the actuator. Parameter identification and
performance analysis were done to identify the best
design parameters for the proposed design
configuration.
This process was done in two steps: first,
optimizing the taper angle by inclining the four lateral
faces of the rectangular cross-section inward, inspired
by tapering seen in octopus arms and elephant trunks,
which improves bending (Calisti et al. 2011), and
second, performing a parametric analysis of
geometric dimensions such as chamber gap, wall
thickness, and other structural parameters.
2.1 Design Variants for Taper
Optimization
A systematic design study was performed to identify
the best taper angle for the multi-chamber, multi-
curvature soft actuator. Several design variants were
defined by varying the inclination of the lateral faces
Design Space Exploration and Performance Evaluation of a Multi-Chamber, Multi-Curvature Soft Actuator for Robotic Applications
117
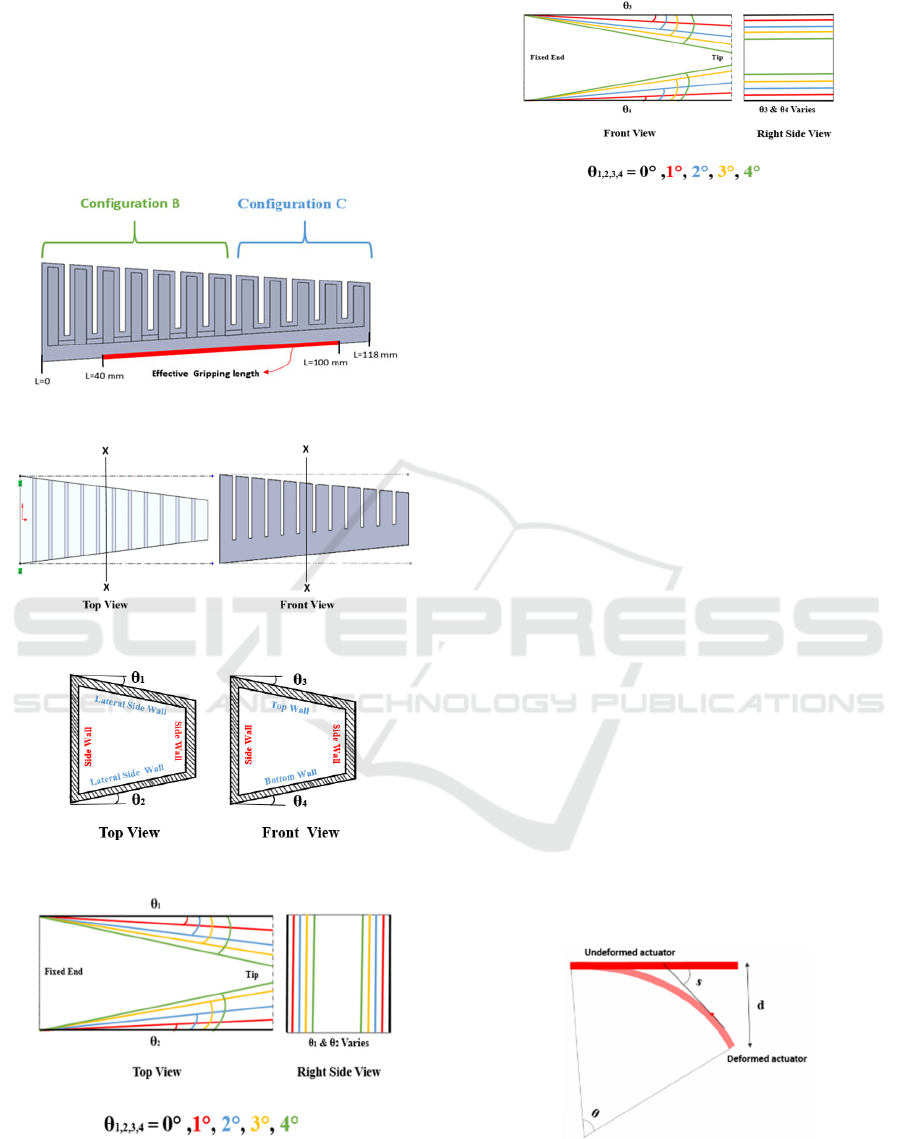
of the rectangular cross-section of the actuator
tapering on actuator performance, inspired by octopus
arms and elephant trunks. Figures 4(a) and (b) show
the taper angle variations proposed in this study.
Table 1 summarizes the different design variants,
their descriptions, and the sets considered to support
the selection of the optimal design variant for further
parametric analysis.
Figure 2(A): Sectional View with Configuration B & C.
Figure 2(B): CAD Model of SPA with Configuration B&C.
Figure 3: Sectional view of SPA at Section X-X.
Figure 4: (A) Taper Angle Variation for SPA (Top View).
Figure 4: (B) Taper Angle Variation for SPA (Front View).
2.1.1 Design Variant Simulation Study and
Ranking Methodology
A systematic simulation study was carried out to
evaluate the bending performance. Each design
variant was modelled with specific combinations of
taper angle. 64 variants were analyzed and labelled as
different “sets” (for example, Set B, Set C, Set D),
where each set denotes a taper condition for each
actuator variant, a finite element simulation was
conducted in Abaqus/CAE to evaluate the bending
deformation under applied internal pressure, where
the actuator was modelled using a hyperelastic
material model (Yeoh model) to capture its nonlinear
elastic behaviour, and the analysis was performed
using a nonlinear static step. Boundary conditions
were applied by fixing the base of the actuator, while
pressure loading was applied uniformly to the inner
chamber surfaces. Further details on the geometry,
meshing, material properties, and loading are
provided in Section 5.
The key parameters recorded along the effective
gripping length (from 40 mm to 100 mm) were:
• Bending angle (θ): the angular change between
the base and tip,
• Slope of the actuator (s): the average angular
gradient along the curved body,
• Tip deflection (d): the vertical displacement of
the actuator tip from its original position, as
shown in Figure 5.
Figure 5: Illustration of actuator deformation parameters.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
118
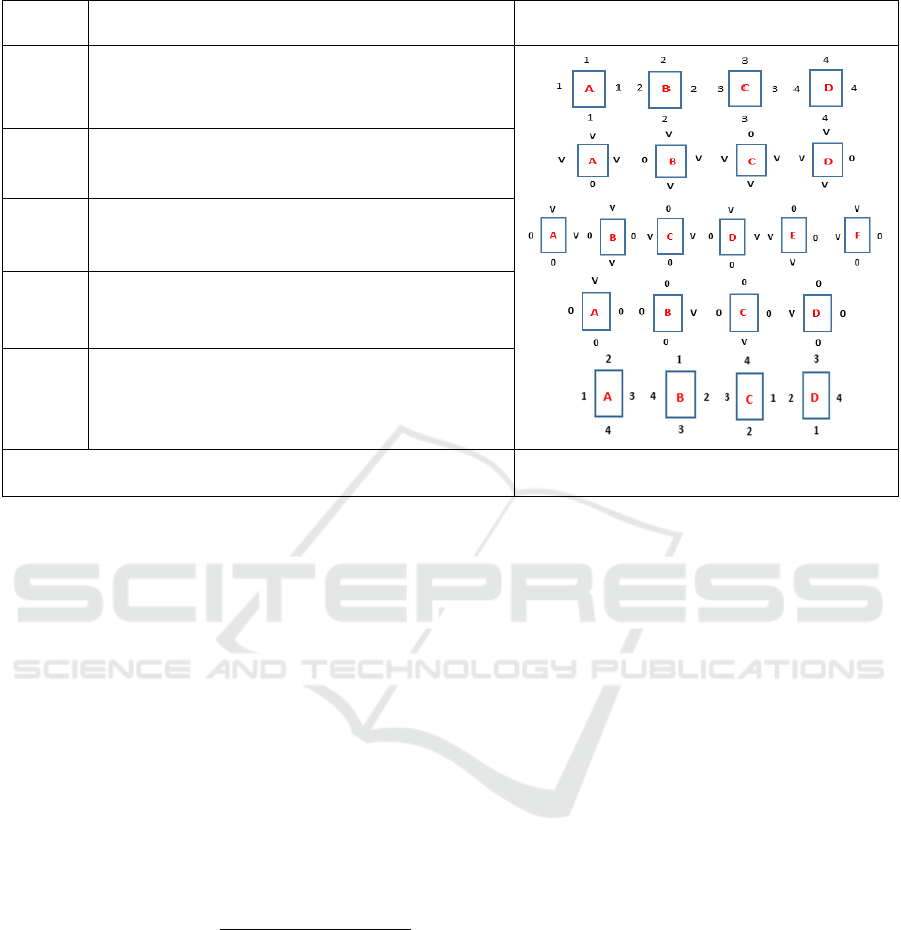
Table 1: Design variants considered for taper angle optimization in multi-chamber soft actuator.
Design
Varian
t
Description Set (At Section X-X)
1 All four faces varied from 1°– 4° taper, forming
sets A – D based on different taper assignments. 4
combinations formed. (1 variation per set).
2 One face fixed at 0°, other three faces varied from
1°–4° taper, forming sets A–D. 16 combinations
formed (4 sets × 4 taper variations in each set).
3 Two faces fixed at 0°, other two faces varied from
1°–4° taper, forming sets A–F. 24 combinations
formed (6 sets × 4 taper variations in each set).
4 Three faces fixed at 0°, one face varied from 1°–4°
taper, forming sets A–D. 16 combinations formed
(4 sets × 4 taper variations in each set).
5 All four faces tapered differently, with angles of 1°,
2°, 3°, and 4° assigned in permutations to form sets
A–D. 16 combinations formed (4 sets × 4
permutations).
V denotes a face with taper angle varied from 1° to 4°
in the stud
y
0 denotes a face with zero angle.
A multi-criteria ranking metric was developed to
objectively compare the variants, based on two
criteria: average performance and uniformity of
bending.
The scoring was calculated as follows:
Final Score = 0.5×Average Weighted Score +
0.5× (1−Average Normalized Variance) where, the
weighted score combines normalized values of
bending angle (0.4 weight), slope (0.3 weight), and
deflection (0.3 weight), this weight is assigned based
on the relative importance in grasping tasks.
Weighted Score=0.4× (Normalized Bending)
+0.3× (Normalized Slope) + 0.3×
(Normalized Deflection)
The normalization for bending, slope, and deflection
metrics was computed using min-max normalization,
i.e.
Normalized Value
=
where the min and max were computed across all
configurations over the effective gripping range (40
mm to 100 mm).
The Average Weighted Score is computed by
averaging the weighted scores across the seven
evaluation points in the gripping zone. The Average
Normalized Variance quantifies how consistently the
actuator performs along its length, by calculating the
variance of slope values normalized over the same
evaluation region.
Based on the final scores as in Table 2, Variant
4D with a 4° taper had the highest rank. However, its
asymmetric left-sided taper produced a diagonal or
inclined bending profile that was less suitable for
gripping. Therefore, Variant 3C with a 2° taper was
chosen, as both the side faces are tapered equally for
further experimental validation. This variant showed
a high bending angle, consistent slope distribution,
and a balanced deflection profile, making it better
suited for soft gripping applications where
predictable, symmetric bending is critical.
2.1.2 Taper Angle for Selected Design
Variants (3C2)
In this study, the actuator cross-section was
rectangular, and the tapering of the side faces was
varied to evaluate its effect on bending performance
Variants were categorized based on how many faces
were tapered and at what angle.
Design Space Exploration and Performance Evaluation of a Multi-Chamber, Multi-Curvature Soft Actuator for Robotic Applications
119
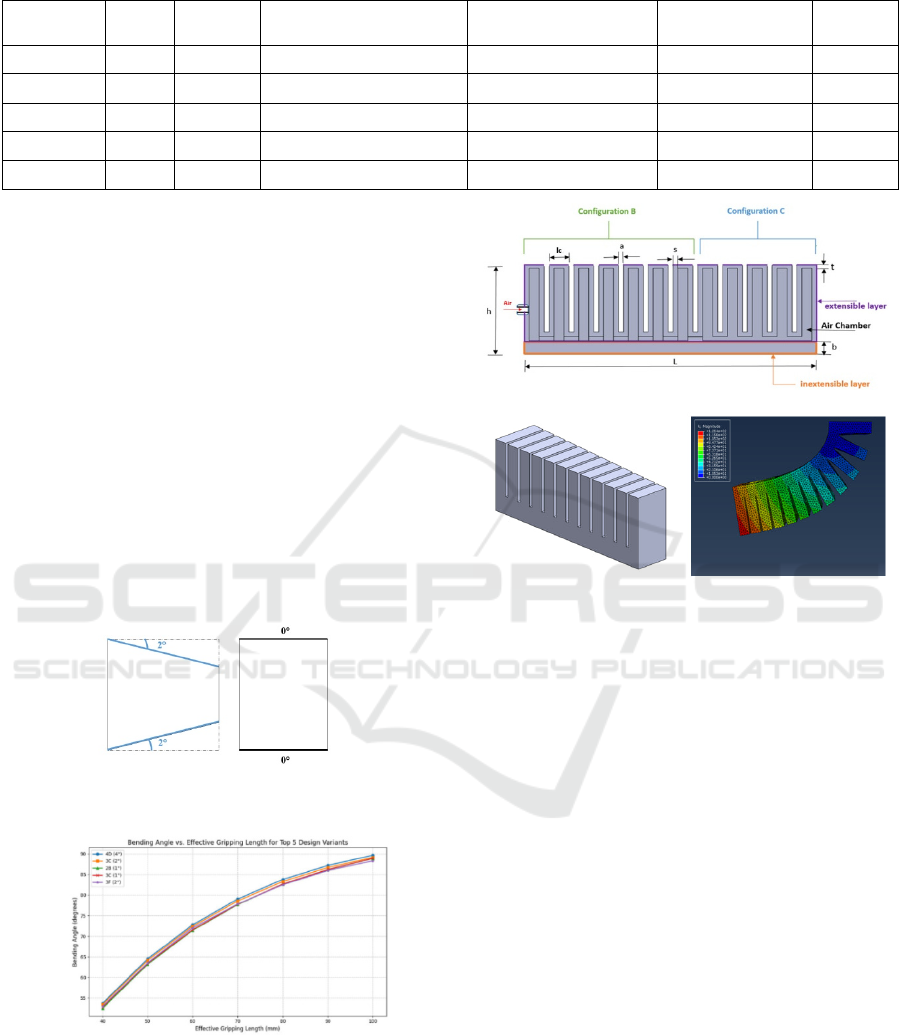
Table 2: Top 5 Ranked Design Variants Based on Weighted Performance Score and Normalized Slope Variance.
Design
Varian
t
Se
t
Tape
r
Angle
Avg Weighte
d
Score
Avg Normalize
d
Slope Variance
Final Score Ran
k
4 D 4° 0.648 0.269 0.6729 1
3 C 2° 0.637 0.264 0.6667 2
2 B 1° 0.632 0.266 0.6626 3
3 C 1° 0.632 0.266 0.6626 3
3 F 2° 0.624 0.275 0.6543 5
• Design Variant 3: Two faces were fixed at 0°
(no taper), while the other two were tapered
at equal angles ranging from 1° to 4°.
• Set C of Variant 3 (3C): Corresponds to a
specific face arrangement where the top and
bottom faces are fixed at 0°, and the left and
right faces are tapered.
• 3C2: In this configuration, the left and right
faces were tapered inward at 2°, while the top
and bottom faces remained at 0.
• This design variant helps bending of actuator
inwards, as the tapered sides make it easier
for the walls to bend in that direction.
• Figure 6 illustrates the rectangular cross-
section from right-side and top views,
indicating the fixed and tapered faces (θ₁ = 0°,
θ₂ = 0°, θ₃ = 2°, θ₄ = 2°).
Top View Front View
Figure 6: Sectional Diagram for Design Variant 3C2.
Figure 7: Bending Behaviour for top design variant.
The selected Design variant 3C2 sectional view,
CAD model and simulation is shown in Figure 8
(a)
(b) (c)
Figure 8: (a) Actuator Sectional View and (b) CAD Model
for 3C-2 degree (c) Simulation.
3 PARAMETRIC STUDY (3C2)
A parametric study systematically investigates how
changing individual geometric parameters affects the
actuator’s bending behaviour and overall
performance.
The objectives of the study are:
1. Understand the Sensitivity: Know which
parameters significantly influence the
performance (e.g., bending angle, force, and
displacement).
2. Optimize the Design: Identify the best
parameters for desired performance (e.g.,
maximum bending angle).
3. Improve Efficiency: Reduce material cost,
air consumption, and increase reliability.
4. Design Guidelines: Propose guidelines for
future designs or prototypes.
To assess performance changes, two metrics were
used: Sensitivity (°/kPa), which measures how much
the bending angle changes per unit pressure (higher
values mean faster bending but harder control), and
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
120
R², which measures how well pressure predicts
bending (values near 1 mean more consistent and
reliable control)
The parameters examined include: chamber gap,
sidewall thickness, gap shape, actuator width, top
wall thickness, and bottom wall thickness. The results
and analysis for each parameter are presented in the
following subsections.
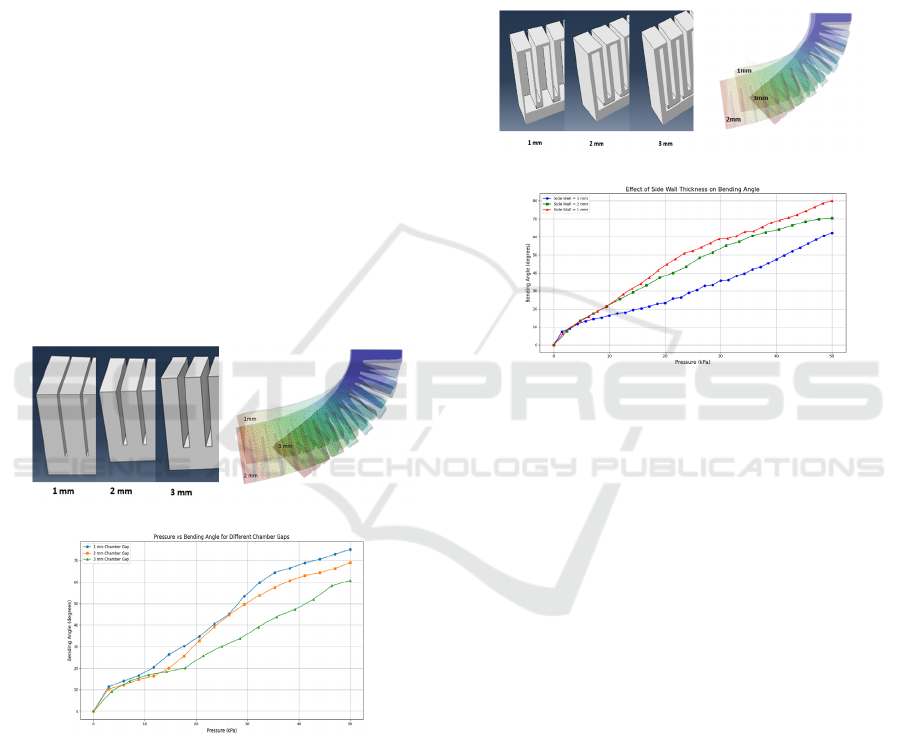
1. Chamber Gap
The chamber gap, i.e, spacing between adjacent
chambers, affects bending angle, sensitivity, and
control predictability. FEA results for 1 mm, 2 mm,
and 3 mm gaps (Figure 9) show that the bending angle
is inversely proportional to gap size. A 1 mm gap
yields the highest sensitivity (1.62°/kPa) due to strong
inter-chamber interaction, but lower predictability (R²
= 0.973) and complex fabrication. A 3 mm gap
minimizes interaction, giving the lowest sensitivity
(1.22°/kPa) but slightly better predictability (R² =
0.983). The 2 mm gap offers a balance with moderate
sensitivity (1.45°/kPa), highest predictability (R² =
0.987), and ease of manufacturing, thus selected as
optimal.
(a) (b)
(c)
Figure 9: (a) Chamber Gap (b) FEA Simulation (c) Pressure
and Bending Angle variation.
2. Side Wall Thickness
The side wall, i.e, the outer enclosure of each air
chamber, affects actuator flexibility, pressure
resistance, and deformation. FEA simulations for
thicknesses of 1 mm, 2 mm, and 3 mm (Figure 10)
show bending angle is inversely proportional to wall
thickness: thicker walls enhance pressure resistance
but reduce flexibility. At 1 mm, the actuator achieved
the highest bending sensitivity (1.718 °/kPa) but
slightly reduced predictability (R² = 0.997) and a
higher risk of ballooning. At 3 mm, stiffness limited
bending, yielding the lowest sensitivity (1.052 °/kPa)
and predictability (R² = 0.963). The 2 mm wall
provided an optimal balance with moderate
sensitivity (1.412 °/kPa), good predictability (R² =
0.973), and adequate structural stability, making it the
preferred choice.
(a) (b)
(c)
Figure 10: (a) Side Wall (b) FEA Simulation (c) Pressure
and Bending Angle variation.
3. Gap Shape
The gap shape, i.e the geometric profile of the space
between adjacent chambers influences deformation
and stress distribution. Four geometries were studied:
rectangular (conventional), trapezoidal, U-shaped, and
V-shaped (Figure 11). The rectangular gap delivered
the highest bending sensitivity (1.41°/kPa) and strong
predictability (R² = 0.973), ensuring consistent
deformation and mechanical efficiency. The U-shape
offered moderate sensitivity (1.08°/kPa, R² = 0.967)
with balanced stress distribution and ease of
fabrication. The V-shape showed slightly lower
sensitivity (1.05°/kPa, R² = 0.963) and risk of localized
stress. The trapezoidal shape minimized stress
concentration but had the lowest sensitivity (1.03°/kPa,
R² = 0.961) and slower actuation. The rectangular gap
was selected for the final design due to its superior
performance and manufacturing simplicity.
4. Width of Actuator (Tapered Profile)
The actuator width, i.e, total lateral dimension at the
base of chambers with a 2° taper based on 3C2
optimization,
affects bending capability, pressure
Design Space Exploration and Performance Evaluation of a Multi-Chamber, Multi-Curvature Soft Actuator for Robotic Applications
121
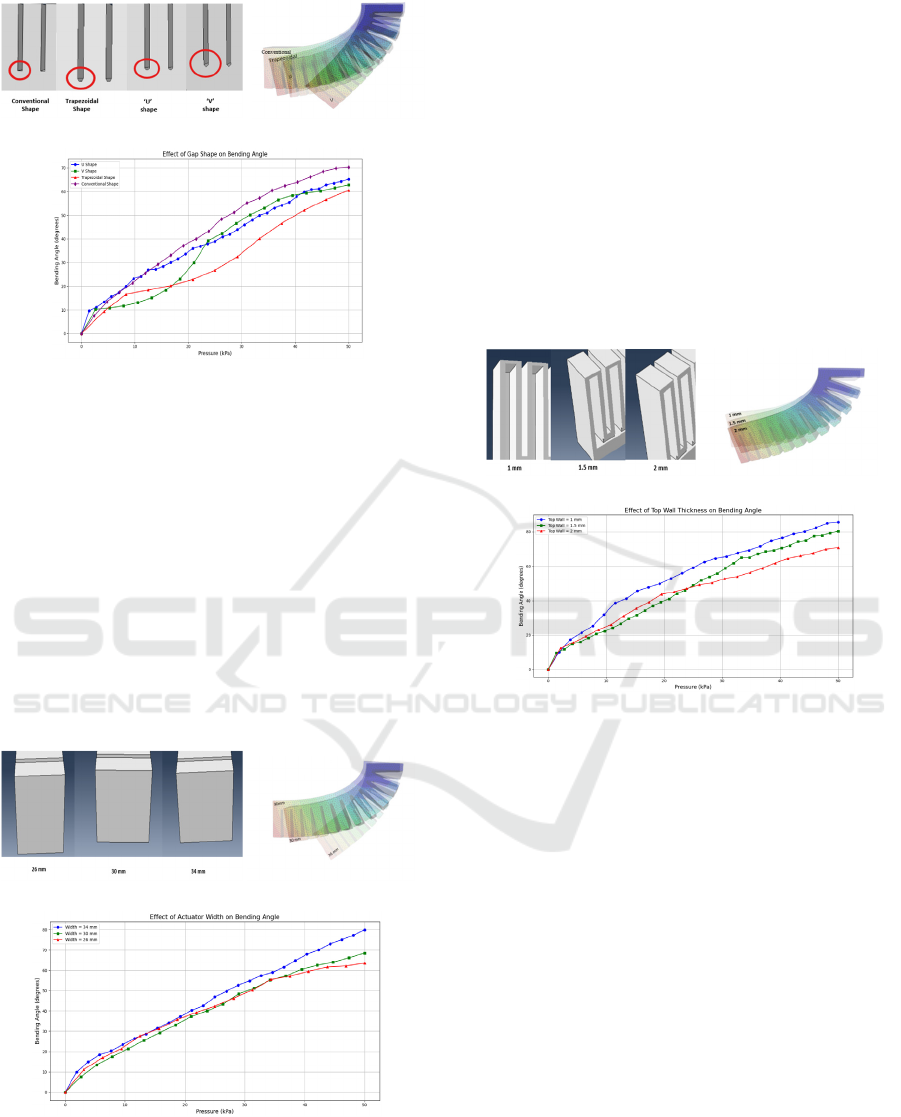
(a) (b)
(c)
Figure 11: (a) Gap Shape (b) FEA Simulation (c) Pressure
and Bending Angle variation.
response, and stability. Three widths: 26 mm, 30 mm,
and 34 mm, were tested (Figure 12). The 34 mm
width showed the highest bending sensitivity
(1.41°/kPa, R² = 0.973) but increased material use and
reduced stiffness. The 26 mm width offered higher
stiffness and faster response but slightly lower
sensitivity (1.05°/kPa, R² = 0.963). The 30 mm width
achieved balanced performance (1.08°/kPa, R² =
0.967), combining substantial bending, stability, and
ease of manufacturing. It was selected as optimal,
avoiding the over-deformation of wider profiles while
maintaining high controllability.
(a) (b)
(c)
Figure 12: (a) Width at fixed end (b) FEA Simulation (c)
Pressure and Bending Angle variation.
5. Top Wall Thickness
Top wall thickness i.e material layer sealing each
chamber from above, inversely proportional to
bending angle, influences pressure containment,
bending range, and deformation uniformity. FEA
tests on 1 mm, 1.5 mm, and 2 mm thicknesses (Figure
13) showed that 1 mm yielded the highest sensitivity
(1.52°/kPa, R² = 0.971) but reduced pressure
resistance and increased ballooning risk. The 2 mm
wall was stiffest (1.05°/kPa, R² = 0.963), limiting
bending but improving high-pressure durability. The
1.5 mm thickness provided balanced performance
(1.26°/kPa, R² = 0.969), offering substantial bending
with improved stability, and was selected as optimal.
(a) (b)
(c)
Figure 13: (a) Top wall (b) FEA Simulation (c) Pressure and
Bending Angle variation.
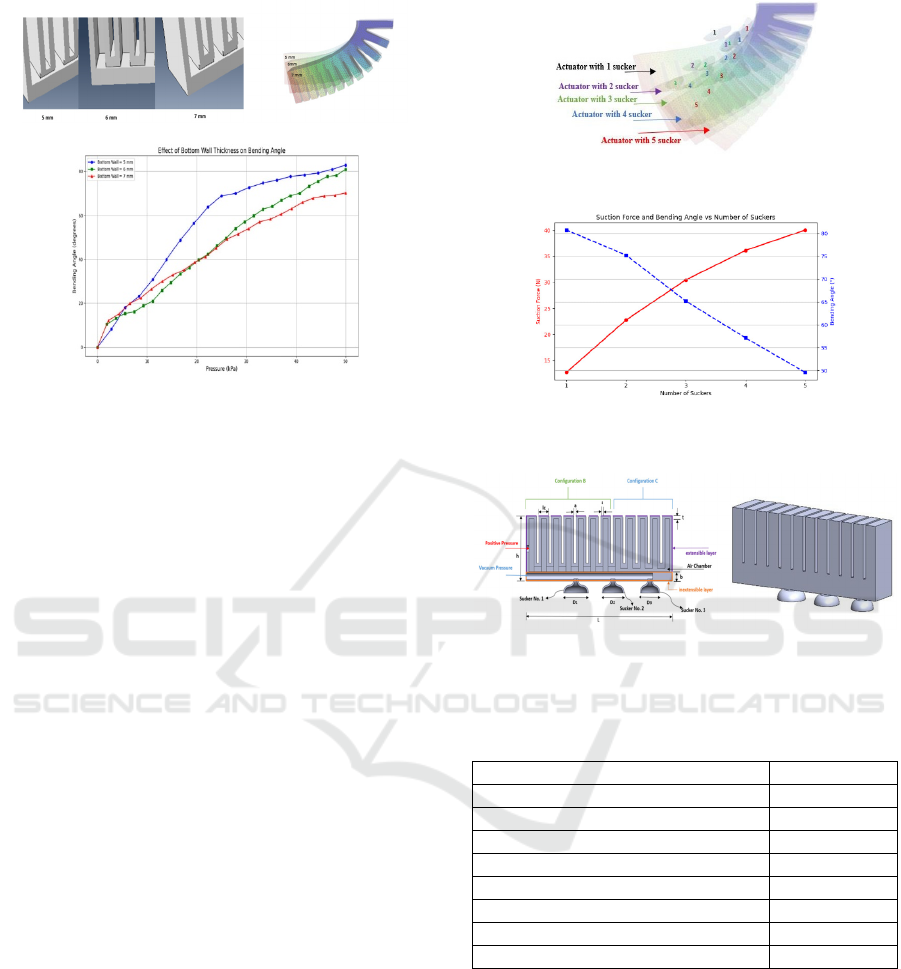
6. Bottom Wall Thickness
Bottom wall thickness defines the actuator’s ability to
resist vertical deformation under internal pressure,
influencing stability and bending performance. FEA
tests on 5 mm, 6 mm, and 7 mm thicknesses show an
inverse relation with bending angle, as in Figure 14.
The 5 mm wall had the highest sensitivity (1.48 °/kPa,
R² = 0.972) but higher bulging risk; the 7 mm wall
was most rigid (1.06 °/kPa, R² = 0.965) but limited
bending. The 6 mm wall offered balanced sensitivity
(1.25 °/kPa, R² = 0.970), good durability, and
manufacturability, making it optimal.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
122
(a) (b)
(c)
Figure 14: (a) Bottom wall (b) FEA Simulation (c) Pressure
and Bending Angle variation.
4 BIO-MIMICRY OF MODIFIED
SOFT ACTUATOR DESIGN
WITH SUCKERS
Biomimicry draws inspiration from nature’s forms,
processes, and systems to inspire engineering
solutions (Benyus 1997). The modified soft actuator
here takes inspiration from the octopus tentacle,
which is a flexible, tapered, boneless structure with
rows of suckers decreasing in size toward the tip. The
suction force generated by a suction cup is given by:
F=ΔP×A
where ΔP is the pressure difference (assumed vacuum
pressure: –50 kPa, atmospheric pressure: 101.3 kPa),
and A=πr
2
is the effective area. Five suckers were
considered with radii from 5 mm to 9 mm.
A simulation study in Figure 15 shows that adding
more suckers increases total suction force by
enlarging the contact area, but too many suckers
reduce the actuator’s bending angle due to increased
surface stiffness. To balance adhesion with flexible
bending, three suckers were selected, placed at
40 mm, 70 mm, and 100 mm along the actuator, with
diameters of 20 mm, 18 mm, and 16 mm,
respectively. This configuration optimizes surface
contact, sealing, and bending for effective gripping of
spherical or irregular objects as shown in Figure 16.
Figure 15: Simulation for number of suckers.
Figure 16: Suction Force vs Bending Angle vs Number of
Suckers.
(a) (b)
Figure 17: (a) Actuator Sectional View (b) CAD Model for
3C-2 degree with Sucker.
Table 3: Parameters of SPA.
Parameters Value (mm)
Side wall thickness (s) 2
Top wall thickness (t) 1.5
Chamber
g
ap (a) 2
Bottom la
y
er (b) 6
Width at base 30
Sucker Diameter (D1) 20
Sucker Diameter (D2) 18
Sucker Diameter (D3) 16
5 SIMULATION STUDIES
The soft actuator was simulated and analysed using
the standard explicit model in ABAQUS/CAE
6.14 (Dassault Systems, 2021) to study the bending
angle under different pressure conditions. The
material parameters used for 3D printing 50A resin
was used in the simulation. The material coefficients
C
10
= 0.25 MPa, C
20
= −0.05 MPa, C
30
= 0.005 MPa
(Sun et al., 2019), were used for Yeoh hyper elastic
Design Space Exploration and Performance Evaluation of a Multi-Chamber, Multi-Curvature Soft Actuator for Robotic Applications
123
mathematical model to characterize the nonlinear
stress-strain behaviour of the soft actuator.
Since the actuator undergoes large deformations
with nonlinear effects in simulation, Nlgeom was
activated ‘ON’. The selected mesh type was 3D
stress, 10-node quadratic tetrahedral hybrid elements
(C3D10H).
A mesh convergence study was performed with
varying global mesh sizes (ranging from 1.5 mm to
4.0 mm).
A mesh size of 2.5 mm was selected as it offered
a good balance between simulation accuracy and
computational efficiency, with negligible variation
observed in deformation behavior upon further
refinement as shown in Figure 18.
(a) (b) (c)
Figure 18: (a) Meshing (b) Gravity Load, Internal Pressure,
BC (c) Self Contact Interaction.
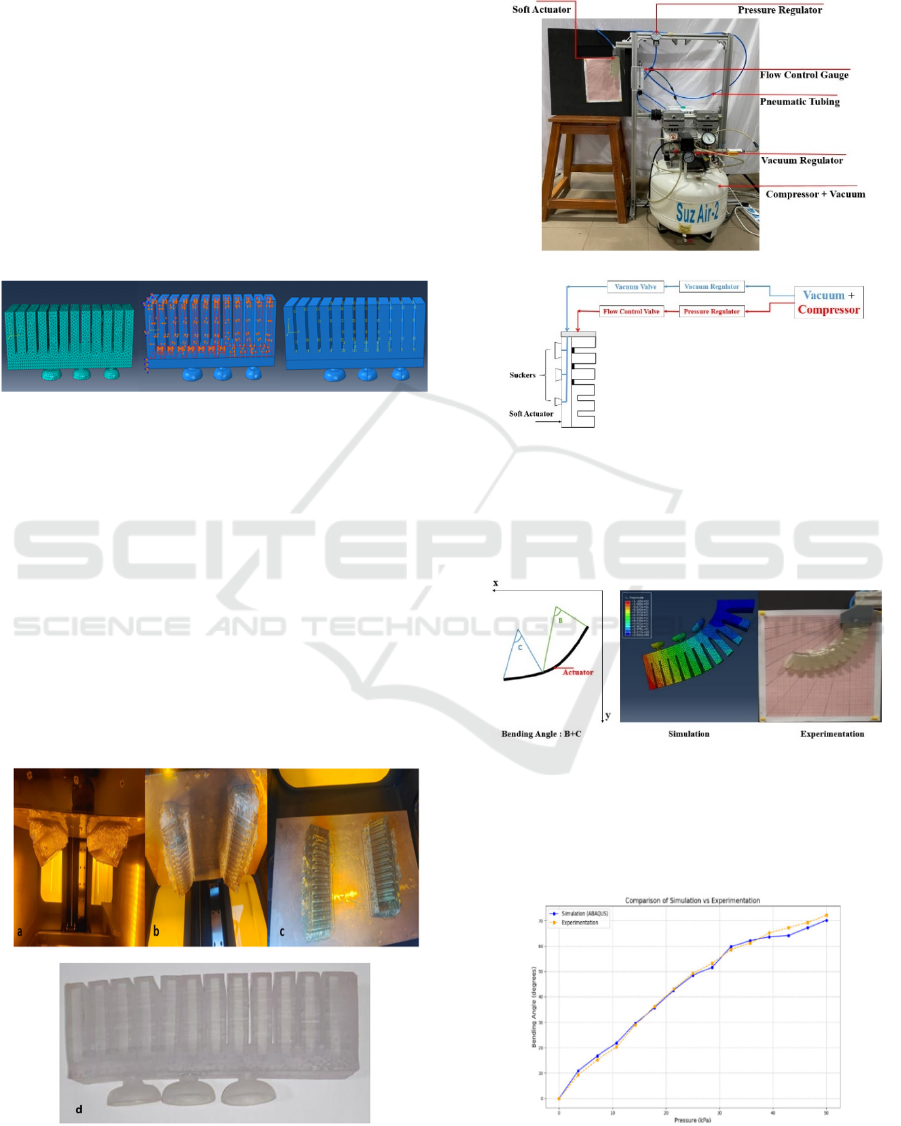
6 PROTOTYPING AND TESTING
The soft actuator was fabricated using SLA (Stereo
lithography) 3D printing on a Formlabs Form 3L
printer with Elastic 50A resin, a flexible material
suitable for pneumatic actuation. The process began
with cleaning the build plate, loading the resin tank
and cartridges, and preparing the print file using
PreForm software for optimal orientation and
support. The final prototype is shown in Figure 19.
Figure 19: (a-c) 3D Printing Steps, (d) Final prototype.
The experimental setup, along with a schematic
diagram of the experimental setup, is shown in Figure
20.
(a)
(b)
Figure 20: (a) Experimental Setup (b) Schematic Diagram
for SPA.
6.1 Bending Angle Measurement
Figure 21: Bending angle of the actuator.
Figure 21 explains the methodology adopted for the
bending angle measurement of the multi-chamber
actuator. Figure 22 shows a comparison of the
bending angle for simulation and experiment.
Figure 22: Bending angle wrt Pressure: Comparison of
Simulation and Experimental results.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
124
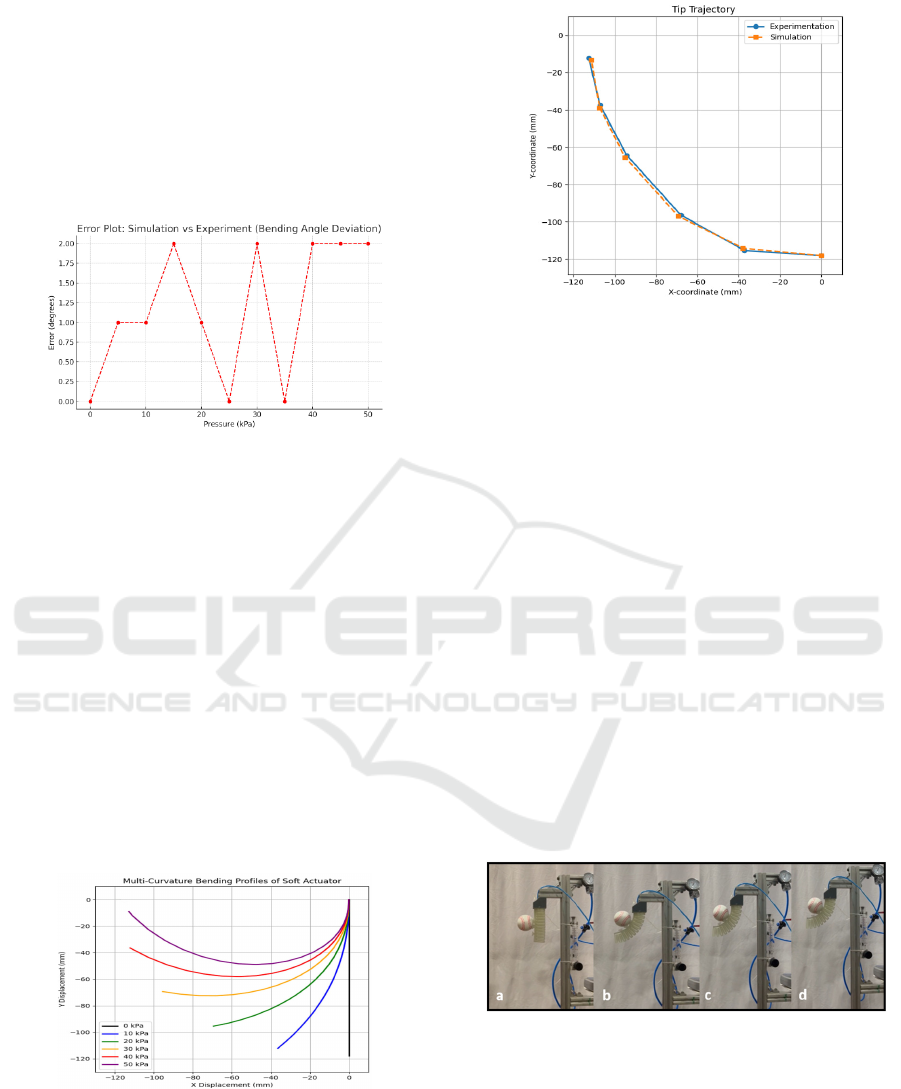
6.2 Error Analysis
To validate accuracy, an error plot of absolute
bending angle deviation between simulation and
experiments shows differences within 2° across the
pressure range, confirming strong agreement as
shown in Figure 23. Minor discrepancies may arise
from material nonlinearity, fabrication tolerances, or
experimental variability.
Figure 23: Bending Error Analysis.
6.3 Multi-Curvature Bending Shape
and Tip Trajectory Analysis
Two deformation analyses were conducted for the
multi-chamber, multi-curvature soft actuator.
Bending profiles were plotted at various pressures
by tracking midline points, revealing non-uniform,
multi-curvature bending shown in Figure 24. This
behavior enhances dexterity and spatial adaptability
in soft robotic tasks.
Tip trajectories were obtained from experimental
video tracking and Abaqus/CAE simulations by
recording X–Y displacements of the actuator tip
relative to the base. The curves show nonlinear tip
motion with pressure, reflecting multi-configuration
deformation shown in Figure 25.
Figure 24: Bending Curve Profiles.
Figure 25: Tip Trajectory.
6.4 Curvature Adaptability Index (CAI)
The CAI measures how effectively an actuator
changes curvature with pressure, which is critical for
adaptable grasping and shape conformity. For the 118
mm multi-chamber, multi-curvature actuator, the
CAI between 10 kPa and 50 kPa is 0.1886
rad·m⁻¹·kPa⁻¹, equivalent to a bending sensitivity of
1.275°/kPa, indicating high curvature responsiveness
and precise deformation control.
7 ACTUATOR GRASPING TEST
The Bending and Gripping capability of the Single
actuator was tested as discussed below.
(a) A small rubber ball was chosen to test the
actuator’s ability to handle compact and delicate
items. The actuator successfully demonstrated its
capability to conform to and grip this ball, as
illustrated in Figure 26.
Figure 26: Demonstration of grasping of a rubber ball.
(b) A smooth, soft plastic ball was used to test the
actuator’s ability to adapt to bigger, lightweight
spherical objects. The actuator reliably grasped
and held this object, as illustrated in Figure 27.
Design Space Exploration and Performance Evaluation of a Multi-Chamber, Multi-Curvature Soft Actuator for Robotic Applications
125
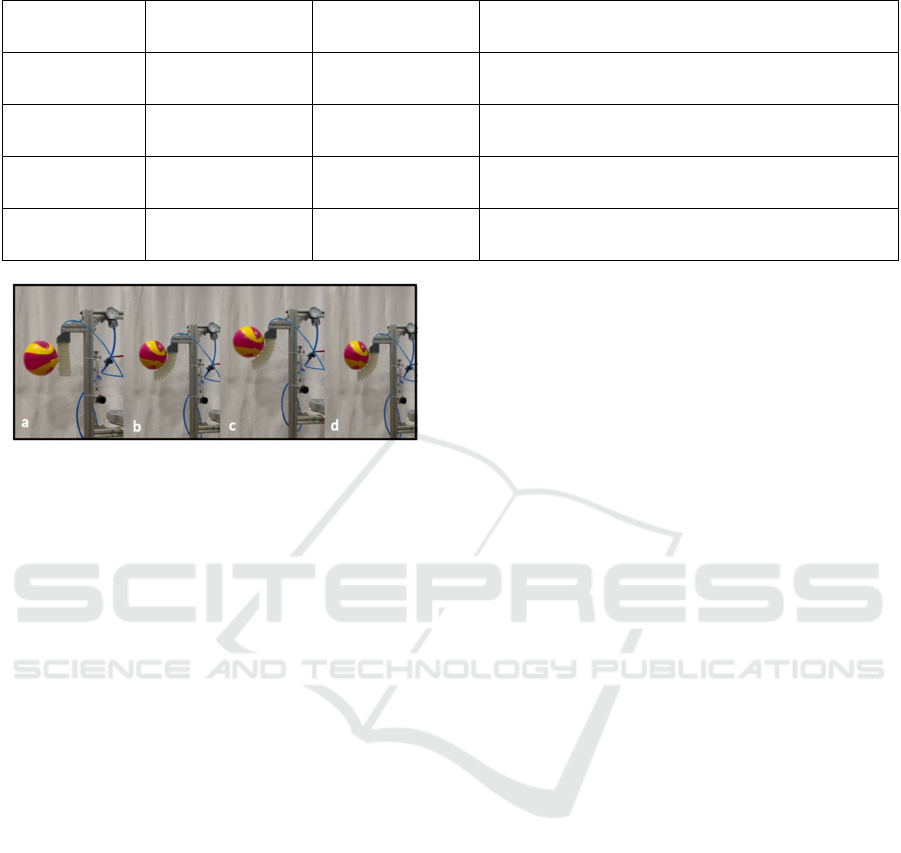
Table 4: Comparison of Proposed Actuator with Existing Designs from Literature.
Reference Type Curvature Profile Key Features
Gariya et al.,
2023
Single chamber Single Ballooning, limited control
Song et al.,
2021
Multi-chamber with
grouped
Multi
Programmable deformation, improved dexterity, Multi-
channel, Complex pneumatic system
Ansari et al.,
2025
Multi-chamber Multi Low output force, no adhesion
Ansari et al.,
2025 (Proposed)
Multi-chamber Multi
Improved curvature range, integrated adhesion i.e
suction for better grasps adaptability
Figure 27: Demonstration of grasping a plastic ball.
8 COMPARATIVE ANALYSIS
The proposed multi-chamber, multi-curvature soft
pneumatic actuator was compared with recent
literature and a previous in-house prototype (Ansari
et al., 2025), as summarized in Table 4. It shows that
the proposed actuator is superior to the available soft
actuators.
9 CONCLUSIONS AND FUTURE
SCOPE
This work presented a bioinspired multi-chamber,
multi-curvature soft pneumatic actuator with
integrated suction cups, designed for variable bending
curvature and adaptive grasping. Using Yeoh
hyperelastic model and FEA, the design space was
explored through parametric studies on chamber gap,
wall thickness, and taper angle. Tip trajectory and
Bending Curve profile confirms the multi-curvature
effects. The actuator achieved a Curvature
Adaptability Index (CAI) of 0.1886 rad·m⁻¹·kPa⁻¹
and bending sensitivity of 1.275°/kPa for a 118 mm
length, outperforming conventional single-curvature
designs in curvature adaptability and tip deflection.
Future work will address these through
asymmetry metrics for design evaluation, inverse
optimization for predictive modeling, multi-finger
gripper integration, exotic chamber geometries,
embedded sensing, and closed-loop control for
precision grasping, aiming to expand applicability in
industrial and service robotics.
REFERENCES
Ansari, U., Pramod, A. S., Varala, N., & Asokan, T. (2025,
July). Design and analysis of a multi-chamber, multi-
curvature soft pneumatic actuator for controlled
directional bending actuation. In AIR 2025 (to appear).
Ariyanto, M., Mulyanto, D., Munadi, M., Nugroho, T., &
Setiawan, J. D. (2019). Three-fingered soft robotic
gripper based on pneumatic network actuator. In 2019
6th International Conference on Information
Technology, Computer, and Electrical Engineering
(ICITACEE) (pp. 1–6). IEEE.
Benyus, J. M. (1997). Biomimicry: Innovation inspired by
nature. Harper Perennial.
Calisti, M., Giorelli, M., Levy, G., Mazzolai, B., Hochner,
B., Laschi, C., & Dario, P. (2011). An octopus-
bioinspired solution to movement and manipulation for
soft robots. Bioinspiration & Biomimetics, 6(3),
036002.
Dassault Systèmes. (2021). Abaqus/CAE User’s Guide
(Version 2021). Dassault Systèmes Simulia Corp.
Gariya, N., Asrani, A., Kumar, S., & Nautiyal, H. (2023).
Bending mechanics of the soft pneumatic single air
chamber bending actuator.
Gariya, N., Kumar, P., Prasad, B., & Singh, T. (2023). Soft
pneumatic actuator with an embedded flexible
polymeric piezoelectric membrane for sensing bending
deformation. Materials Today Communications, 35,
105910.
Hu, W., Mutlu, R., Li, W., & Alici, G. (2018). A structural
optimisation method for a soft pneumatic actuator.
Robotics, 7(2), 24.
Huang, W., Xiao, J., & Xu, Z. (2021). A variable structure
pneumatic soft robot. Scientific Reports, 11, 1–10.
Lei, J., Ge, Z., Fan, P., Zou, W., Jiang, T., & Dong, L.
(2022). Design and Manufacture of a Flexible
Pneumatic Soft Gripper. Applied Sciences, 12(13),
6306.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
126

Mosadegh, B., Polygerinos, P., Keplinger, C., Wennstedt,
S., Shepherd, R. F., Gupta, U., Shim, J., Bertoldi, K.,
Walsh, C. J., & Whitesides, G. M. (2014). Pneumatic
networks for soft robotics that actuate rapidly.
Advanced Functional Materials, 24(15), 2163–2170
Navas, E., Fernandez, R., Sepúlveda, D., Armada, M., &
Gonzalez-de Santos, P. (2021). Soft grippers for
automatic crop harvesting: A review. Sensors, 21(8),
2689.
Ogden, R. W. (1997). Nonlinear elastic deformations (2nd
ed.). Dover Publications.
Polygerinos, P., Wang, Z., Overvelde, J. T. B., Galloway,
K. C., Wood, R. J., Bertoldi, K., & Walsh, C. J. (2015).
Modeling of soft fiber-reinforced bending actuators.
IEEE Transactions on Robotics, 31(3), 778–789.
Qin, L., Peng, H., Huang, X., Liu, M., & Huang, W. (2023).
Modeling and simulation of dynamics in soft robotics:
A review of numerical approaches. Current Robotics
Reports, 5(1), 1–13.
Rogóż, M., Zeng, H., Xuan, C., Wiersma, D. S., &
Wasylczyk, P. (2016). Soft robotics: Light-driven soft
robot mimics caterpillar locomotion in natural scale.
Advanced Optical Materials, 4(11), 1902–1906.
Singh, K. S., & Asokan, T. (2019, October). Design and
analysis of a soft bidirectional bending actuator for
human-robot interaction applications. In 2019 28th
IEEE International Conference on Robot and Human
Interactive Communication (RO-MAN) (pp. 1–6).
IEEE.
Song, E. J., Lee, J. S., Moon, H., Choi, H. R., & Koo, J. C.
(2021). A multi-curvature, variable stiffness soft
gripper for enhanced grasping operations. Actuators,
10(12), 316.
Su, H., Hou, X., Zhang, X., Qi, W., Cai, S., Xiong, X., &
Guo, J. (2022). Pneumatic soft robots: Challenges and
benefits. Actuators, 11(3), 92.
Sun, Y., Zhang, Q., Chen, X., & Chen, H. (2019). An
optimum design method of Pneu-Net actuators for
trajectory matching utilizing a bending model and GA.
Journal of Robotics, 2019, 6721897.
Tang, X., Li, H., Ma, T., Yang, Y., Luo, J., Wang, H., &
Jiang, P. (2022). A review of soft actuator motion:
Actuation, design, manufacturing and applications.
Actuators, 11(11), 331.
Wu, Y., Yim, J. K., Liang, J., Shao, Z., Qi, M., Zhong, J.,
& Lin, L. (2019). Insect-scale fast-moving and
ultrarobust soft robot. Science Robotics, 4(32),
eaax1594.
Yang, F., Ruan, Q., Man, Y., Xie, Z., Yue, H., Li, B., & Liu,
R. (2020). Design and optimize of a novel segmented
soft pneumatic actuator. IEEE Access, 8, 3006865–
3006877.
Yeoh, O. H. (1993). Some forms of the strain energy
function for rubber. Rubber Chemistry and Technology,
66(5), 754–771.
Zhang, H., Kumar, S., Chen, F., Fuh, J. Y. H., & Wang, M.
Y. (2019). Topology optimized multimaterial soft
fingers for applications on grippers, rehabilitation, and
artificial hands. IEEE/ASME Transactions on
Mechatronics, 24(1), 120–131.
Zhang, J., Wang, T., & Hong, J. (2017). Review of soft-
bodied manipulator.
Journal of Mechanical
Engineering, 53(13), 19–28.
Zaidi, S., Maselli, M., Laschi, C., & Cianchetti, M. (2021).
Actuation technologies for soft robot grippers and
manipulators: A review. Current Robotics Reports,
2(3), 167–181.
Design Space Exploration and Performance Evaluation of a Multi-Chamber, Multi-Curvature Soft Actuator for Robotic Applications
127
