
A Digital Twin Enabled Runtime Analysis and Mitigation for
Autonomous Robots Under Uncertainties
Jalil Boudjadar and Mirgita Frasheri
Department of Electrical and Computer Engineering, Aarhus University, Denmark
Keywords:
Autonomous Mobile Robots, Digital Twins, Runtime Monitoring, Performance Analysis, Uncertainty
Mitigation, Validation.
Abstract:
Autonomous mobile robots are increasingly deployed in various application domains, often operating in envi-
ronments with uncertain conditions. Such robots rely on the state and performance assessments at runtime to
autonomously control the robot functionality. However, uncertainty can significantly impact the robot sensors
and actuators making it challenging to assess the robot state and quantify its performance reliably. This paper
proposes a digital twin (DT) asset for the runtime estimation and validation of state and performance for a mo-
bile autonomous robot "Turtlebot3" (TB3) operating under uncertainties, namely Lidar sensor obstruction and
unknown floor friction and density. The proposed DT setup enables real-time state synthesis post-uncertainty,
so that to estimate the performance and validate it using TeSSLa monitors, and compute mitigation actions.
To maintain the robot autonomy, our DT intervenes only when an uncertainty is identified. The experimental
results demonstrate that our DT enables to eliminate 70% of the related uncertainty while it mostly maintains
the real-time synchronization with the physical TB3 robot operating a frequency of 0.2s.
1 INTRODUCTION
Autonomous mobile robots are increasingly being
adopted in various application domains, including
manufacturing, housekeeping services, and trans-
portation (Abbadi and Matousek, 2018; Zhao and
Chidambareswaran, 2023; Malik et al., 2023). These
robots are designed to monitor their internal state,
analyze performance metrics, reason about their sur-
roundings, and execute actions autonomously to carry
out a given mission (Lewis and Ge, 2018). A crit-
ical aspect of autonomous robots operation is the
decision-making process, often referred to as “control
loop”, which relies on essential runtime inputs such as
state estimation and performance assessment.
Uncertainty in deployment environments presents
a significant challenge to state estimation, perfor-
mance assessment and overall functionality, such as
sensors noise, localization errors, and unexpected
floor density & friction (Ramesh et al., 2022; Zhang
et al., 2024). In such dynamic and unpredictable envi-
ronments, sensor obstruction can result in incomplete
state information while environment conditions, such
as muddy floor affecting traction, can lead to unreli-
able speed estimation. Addressing these uncertainties
and mitigating their impact are crucial to ensure reli-
able autonomous operation, timely and efficient cor-
rective actions (Fontanelli et al., 2021).
Various techniques have been proposed to mit-
igate the aforementioned uncertainty-related chal-
lenges (Filippone et al., 2024; Stephens et al., 2024;
Kok and Soh, 2020; Lee et al., 2022; Fontanelli
et al., 2021), among which digital twins (DTs) have
emerged as a promising solution (Kaigom and Roß-
mann, 2020). Further elaboration on the state of the
art for uncertianty mitigation in autonomous robots is
provided in Section 2.
Recently, DTs are used in autonomous robots for
different purposes such as runtime monitoring (Feng
et al., 2021; Boudjadar and Tomko, 2022), uncer-
tainty mitigation (Rivera et al., 2021; Betzer et al.,
2024), performance assessment (Loquercio et al.,
2020), runtime control (Andalibi et al., 2021), and
self-adaptation (Allamaa et al., 2022), as DTs enable
to synthesize a complete state of the robot and its en-
vironment from partial state data under different con-
ditions.
However, deploying a DT to operate on-board the
robot at runtime presents significant computational
challenges. In fact, the limited computational re-
sources available on autonomous robots, mostly de-
ployed using resources-constrained platforms such as
96
Boudjadar, J. and Frasheri, M.
A Digital Twin Enabled Runtime Analysis and Mitigation for Autonomous Robots Under Uncertainties.
DOI: 10.5220/0013772600003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 96-104
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

micro-control and RaspBerry Pi boards, can hinder
the real-time execution of a DT, potentially leading to
desynchronization between the DT and the physical
robot. Moreover, some of the performance indicators
might not be computable simply by incorporating sen-
sor data, for which additional models and simulations
are needed.
In this paper, we develop a framework for lever-
aging DTs in autonomous robotics, operating under
uncertainty, while addressing the challenges posed
by computational constraints without compromising
real-time decision-making. We use the MQTT proto-
col to livestream the data and commands between the
TB3 robot and its cloud-located DT. By enabling real-
time estimation of state and performance possible, our
DT framework contributes to mitigate different un-
certainty cases (Lidar obstruction, unexpected floor
density-friction level, extreme path slope and steep-
ness) via a set of runtime correction actions, mainly
overriding the lidar readings and control actuations.
To increase robot reliability, we use TeSSLa runtime
monitors (Kallwies et al., 2022) to analyze and vali-
date the functionality, performance deviation, and un-
certainty mitigation in DT before integrating it into
the decision making of TB3.
The rest of the paper is structured as follows: Sec-
tion 2 reviews the state of the art. In Section 3,
we present the proposed methodology and require-
ments for runtime performance assessment and val-
idation. Section 4 describes the DT asset, includ-
ing the state estimation, performance assessment pro-
cesses and validation. Experimental results regard-
ing the performance assessment, validation and un-
certainty mitigation are presented in Section 5. Fi-
nally, Section 6 concludes the paper.
2 UNCERTAINTY AND RUNTIME
PERFORMANCE
MONITORING
Different strategies on estimating and validating
robots runtime performance under uncertainty have
been explored, using, e.g., statistical models instead
of deriving first principles dynamics models (Xu
et al., 2022), probabilistic models and Bayesian fil-
ters (Kim et al., 2021), groups of robots to estimate
their joint positions in a known map through coopera-
tion (Schmitt et al., 2002), or extended Kalman filters
for pose estimation (Hartley et al., 2020). In addi-
tion, reinforcement learning (RL) techniques (Singh
et al., 2022), as well as DT-based approaches that
enable run-time reconfiguration (Feng et al., 2021)
have been investigated as well. RL techniques have
been adopted in robotics to deal with tasks related
to manipulators, trajectory tracking and path plan-
ning (Zhang and Mo, 2021). However, while sim-
ulation results show great promise, their real world
application remains a challenge (Dulac-Arnold et al.,
2019; Smyrnakis et al., 2020), mainly due to lim-
ited uncertainty samples needed for learning (Ahmadi
and Fateh, 2016; Zhang and Mo, 2021). Further-
more, providing real-time inference is not trivial, as
the system is simultaneously being subject to delays
in sensory input and actuation (Dulac-Arnold et al.,
2019), as well as limited memory and computational
resources. Loquercio et. al on the other hand con-
sider the uncertainty coming from the neural networks
themselves, and use a combination of Bayesian be-
lief networks and Monte Carlo simulations for uncer-
tainty estimation (Loquercio et al., 2020).
On the other hand, DT-based approaches can be
deployed in the cloud, where the restrictions on com-
putational capacity do not apply. Dobaj et al. pro-
posed a DevOps approach (Dobaj et al., 2022), where
before replacing a service A with another service B,
the latter is subjected to runtime verification to ensure
B will generate reasonable output. Another approach
consists in deploying control parameters estimated in
simulation to the real system, such as an ECU, while
considering noise and possible edge cases (Allamaa
et al., 2022). DTs can also be used to monitor produc-
tion systems and processes, thereby generating and
deploying new strategies in order to optimize system
performance (Kang et al., 2019). These strategies are
to be verified and validated such that the correct actu-
ation is applied to the system. Rivera et al. consider
deriving an actuation from multiple outcomes of mul-
tiple DTs, while updating the reference signals used
by the DTs, as the error with the physical robot in-
creases (Rivera et al., 2021).
3 RUNTIME ANALYSIS AND
VALIDATION OF
PERFORMANCE
In order to deliver efficient control of the robot func-
tionality, we need to enable reliable runtime perfor-
mance assessment. This section defines the TB3 state,
performance indicators, and requirements for runtime
validation. It also presents the uncertainty features
and how to mitigate the underlying impact.
A Digital Twin Enabled Runtime Analysis and Mitigation for Autonomous Robots Under Uncertainties
97
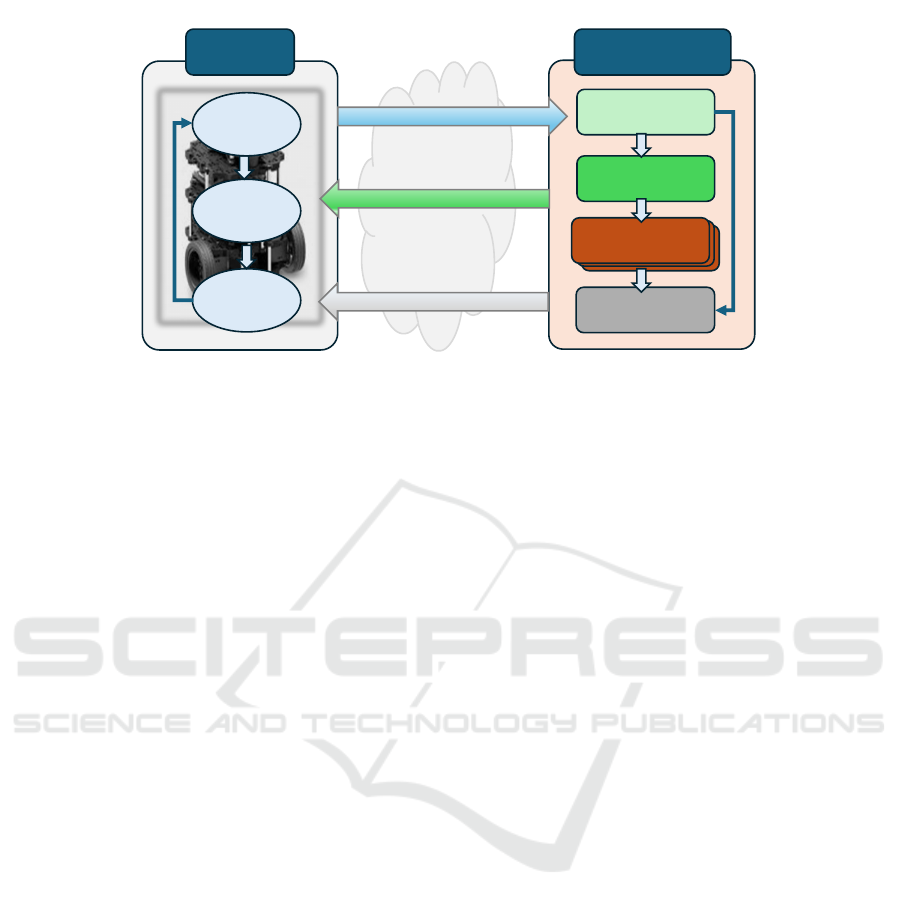
TB3 Digital twinTB3 Robot
Analyze
Actuate
Sense
State estimator
Performance
Assessor
TeSSLa Monitors
Uncertainty
mitigation (Ctrl)
TeSSLa Monitors
TeSSLa Monitors
Runtime data (partial state)
Complete state (data, performance)
Ctrl commands
MQTT
Figure 1: Proposed methodology for performance assessment and validation.
3.1 Overall Methodology
Figure 1 illustrates the methodology we propose to
enable runtime quantification and validation of TB3
performance under uncertainties. TB3 publishes its
state, including a set of ROS topics, to DT via the
MQTT protocol. Upon receiving this data, DT syn-
thesizes the missing or corrupted information using
both the actual state and historical records. A per-
formance assessment is then conducted on the recon-
structed state.
Once Lidar data and velocity are fully synthe-
sized, a validation check is performed using various
TeSSLa monitors. The results of this runtime vali-
dation serve as a basis for uncertainty mitigation. If
inconsistencies in performance or data are detected,
a corrective action is issued to the robot through an
MQTT packet. This mitigation may involve overrid-
ing Lidar data (correction action), allowing the robot
to utilize more reliable and complete information to
compute new actuations, or adjusting the robot’s ve-
locity through a direct control command (mitigation
action).
3.2 State Specification
TB3 robot operates on battery power and utilizes a
Light Detection and Ranging (Lidar) sensor to per-
ceive its environment by performing a 360-degree
scan (a = ⟨a
1
,..,a
360
⟩), measuring the distances at
each angle a
i
to detect obstacles. TB3 navigates using
two wheel motors that can be actuated individually.
The Lidar data is communicated to the robot con-
trol system, deployed on a Raspberry Pi, to analyze its
environment and estimate the robot state. As an out-
put, the control loop actuates the wheels by updating
the robot expected velocity v
e
, given in terms of two
attributes: linear velocity v
e
l
and angular velocity v
e
a
.
The linear velocity is in fact the translational speed
to move forward and backward, whereas the angular
speed is the rotational velocity to steer left and right.
Given unexpected environment conditions, the actual
speed may differ from the expected one, e.g. wheels
spinning due to low friction floor (mud), low density
ground (sand) or highly steep paths. Similarly, we
define the actual velocity v
a
= ⟨v
a
l
,v
a
a
⟩ to be given
in terms of the actual linear velocity v
a
l
and angular
velocity v
a
l
. The distinction of actual and expected
speeds enables to identify different uncertainty cases,
at least those related to changes in the floor density,
friction and extreme steepness. However, compared
to expected speed computed by the TB3 control, esti-
mating the actual speed requires further analysis using
Lidar data and expected speed over a period of time,
i.e. a sequence of data points.
Therefore, we define the robot state S =
⟨⟨a
1
,.., a
360
⟩,⟨v
e
l
,v
e
a
⟩,⟨v
a
l
,v
a
a
⟩⟩ to comprise the Lidar
readings, expected speed, and actual speed. The state
is in fact time dependent, therefore we write S
t
to be
the robot runtime state at time t. In fact, the robot is
not able to provide the entire set of state attributes at
runtime depending on the uncertainties encountered.
The actual state is communicated between the
robot and its digital twin replica mainly using the ROS
topics scan, odom and cmd_vel.
3.3 Runtime Validation
TB3 functionality and performance are subject to dif-
ferent requirements to be validated for each runtime
state. Namely, we consider the following require-
ments:
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
98

Safety Requirements. The distance to any obstacle
must always be larger than a relative safety margin
Ω() dependent on the actual speed.
P1 : ∀t i, S
t
.a
i
≥ Ω(S
t
.v
a
)
Performance Requirements. This requirement
aims to maintain energy-efficient navigation by
reducing the difference between the actual and
expected speeds, i.e the difference is always less than
a threshold E .
P2 : ∀t,S
t
.v
a
− S
t
.v
e
≤ E
Consistency Requirements. A data consistency re-
quirement is that the Lidar readings are always within
the sensor range, i.e. 0.14m and 3.5m.
P3 : ∀t i, 0.14 ≤ s
t
.a
i
≤ 3.5
Furthermore, the difference between two consecu-
tive readings must be less than the maximum distance
TB3 can travel for a scan sample duration δ.
P4 : ∀t i, S
t
.a
i
− S
t+δ
.a
i
≤ |S
t
.v
a
∗ δ|
In addition, consistency must be maintained between
adjacent angle readings, ensuring that an obstacle is
detected across multiple neighbor angles.
P5 : ∀t i, ∀i j,
(S
t
.a
i
− S
t
.a
i+1
) ≤ γ ∧ (S
t
.a
i
− S
t
.a
i−1
) ≤ γ
We implement each requirement as a runtime
monitor in the TeSSLa tool (Kallwies et al., 2022).
This will enable to ensure that TB3 behavior adheres
to the specified properties.
Listing 1: TeSSLa Specification for the runtime monitor of
P4.
in act_speed : Events[Int]
in old_Lidar : Events[List[Int]]
in cur_Lidar : Events[List[Int]]
def consistency(old_Lidar:List[Int], cur_Lidar: List[Int],
speed: Int):
Boolean = { all(range(0, 359), i −> abs(old_Lidar[i] −
cur_Lidar[i]) <= speed
*
0.2)}
out validation := lift(consistency)(old_Lidar, cur_Lidar,
act_speed)
However, in case of uncertainty, the runtime mon-
itors cannot validate the aforementioned properties
given that some of the attributes are unreliable or not
available. For example, in case of lidar obstruction,
TB3 cannot estimate S
t
.a
i
in P1-P3-P4. To tackle this
challenge, Section 4 proposes a TB3 digital twin to
synthesize the runtime state attributes, assess and val-
idate the performance.
4 DIGITAL TWINS-BASED
PERFORMANCE ESTIMATION
The proposed digital twin is composed of five core
modules, coordinated by a central orchestrator, and
communicates with TB3 via the MQTT protocol.
Orchestrator. The DT Orchestrator is responsible
for managing the runtime execution of the DT mod-
ules based on the robot’s current state and perfor-
mance requirements (P1–P5). It is in fact a MQTT
client process that is triggered every time a new
packet is received from the actual robot via the MQTT
listener.
Upon receiving new inputs from TB3, through the
MQTT listener, the orchestrator initiates the execu-
tion of the State Estimator Module and collects its
output. If the analysis detects an uncertainty, the or-
chestrator invokes the Performance Assessor, Safety
and Performance Validation Modules, and, if neces-
sary, the Mitigation Module too. To maintain the
robot’s autonomy, our DT is designed to be non-
intrusive so that it does not override the robot’s de-
cisions unless a clear uncertainty or inconsistency is
identified. Listing 2 depicts the orchestrator interface
to acquire TB3 inputs and publish the results to the
robot depending on the identified uncertainty (either
Lidar data only, or velocity commands only, both or
none).
Listing 2: Orchestrator interfaces.
# l i s t e n i n g t o TB3 i n p u t s
d e f o n _messag e ( c l i e n t , u s e r d a t a , msg ) :
g l o b a l i n p u t s , l a t e s t _ v e l o c i t y ,
l a t e s t _ l i d a r
i n p u t s = j s o n . l o a d s ( msg . p a yl o ad .
de co de ( " u t f −8 " ) )
t w i s t . l i n e a r . x = i n p u t s .
g e t ( " l i n e a r _ x " , 0 )
t w i s t . a n g u l a r . z = i n p u t s .
g e t ( " a n g u l a r _ z " , 0 )
# p u b l i s h t h e ou t co m es fr om DT t o TB3
i f ( u n c e r t a i n = 1 )
c l i e n t . p u b l i s h ( LIDAR_TOPIC , command )
e l i f ( u n c e r t a i n =2 )
c l i e n t . p u b l i s h ( VELOCITY_TOPIC , command )
e l i f ( u n c e r t a i n =3 )
p ay l oa d = { " l i d a r " : n e w _ li d a r ,
" v e l o c i t y " : n e w _ v e l o c i t y }
c l i e n t . p u b l i s h ( OUTPUT_TOPIC ,
j s o n . dumps ( p a y l oa d ) )
State Estimator. This module reconstructs the Li-
dar data if found to be incomplete (missing angle
readings) or inconsistent (a large number of zero-
values or undefined values). Using historical data and
A Digital Twin Enabled Runtime Analysis and Mitigation for Autonomous Robots Under Uncertainties
99
Time
Distance
X
α
X
X’
t
t’
S
t
.a
S
t’
.a
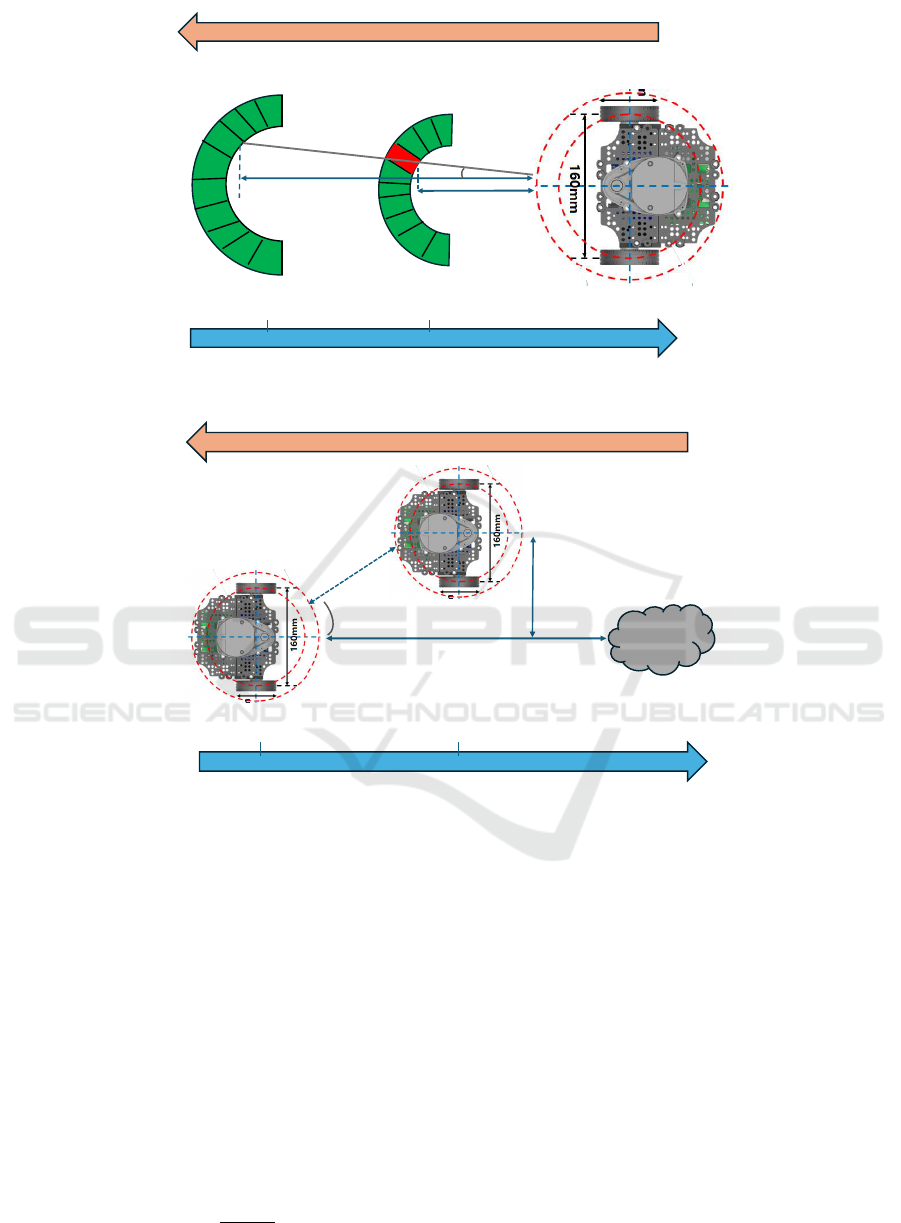
Figure 2: Estimation of a corrupted Lidar data point.
Time
Distance
t
t’
S
t
.a
0
Obstacle
Y
D
α
Figure 3: Assessment of the Robot linear velocity.
actual velocity, the state estimator computes how far
TB3 would have moved during the sensor failure win-
dow and adjusts the corrupted angle readings accord-
ingly. This estimation allows the module to infer plau-
sible values for the corrupted parts of the Lidar scan,
ensuring a complete and usable environmental repre-
sentation.
Figure 2 illustrates a scenario of a valid Lidar data
snapshot (S
t
.a) at time t and a corrupted Lidar data
point (red cell) at time t
′
that is ulterior to t, and de-
picts the different variables used later on for the esti-
mation of the corrupted data point.
The estimation of each corrupted data point a
i
, in
the front hemisphere of the Lidar, at time t
′
= t + δ
is computed using its last valid value at time t as fol-
lows:
S
t
′
.a
i
=
X
′
cos(α)
where
X
′
= X −
Z
t
′
t
S
t
.v
a
l
∗ ∆t
is the x-axis distance at time t
′
,
X = cos(i) ∗ S
t
.a
i
is the x-axis distance at time t
′
,
R
t
′
t
S
t
.v
a
l
∗ ∆t is the
linear distance traveled by TB3 between t and t
′
, and
α ∈ [−90,90] corresponds to the Lidar index i within
the range [0,90] ∪ [270,360].
Performance Assessor. This module evaluates the
robot’s actual velocity by calculating its real speed
(actual linear velocity v
a
l
) over the most recent inter-
val. As stated earlier, we cannot rely on the wheels en-
coder (e.g., SLAM) to estimate the actual speed given
the deployment environment uncertainties where the
robot wheels can spin due to low floor friction or den-
sity.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
100

Using consecutive state snapshots, the perfor-
mance assessor determines the distance the robot has
traveled with respect to a reference obstacle in the
front hemisphere and divides it by the time elapsed
(typically 0.2 seconds, matching the sensor sampling
rate).
Figure 3 depicts a scenario where TB3 moves
from a location (state at time t) to another location
(state at time t
′
) relatively to a static obstacle. For-
mally, the linear velocity of TB3 at time t
′
= t + δ can
be computed using information from both the com-
plete state S
t
and its subsequent partial state S
t
′
as fol-
lows:
S
t
′
.v
a
l
=
(
S
t
.a
0
−S
t
′
.a
0
δ
if S
t
.v
e
a
= 0
S
t
.a
0
−A
δ
Otherwise
where A =
Y
sin(90−α)
and Y is the y-axis angular dis-
placement between time point t and t
′
computed as
follows:
Y = (S
t
.v
e
l
+ D/2) ∗ sin(α) ∗ δ
In fact, if the robot is heading towards the obstacle,
we can just rely on the difference between the Lidar
data point readings from angle 0 (S
t
.a
0
and S
t
′
.a
0
).
Otherwise, one has to consider the angular deviation
from the trajectory to the obstacle.
Both the estimated Lidar data and linear velocity
will be commuinicated to the validation module for
further analysis and approval to decide potential mit-
igation and intervention if the actual robot state does
not satisfy the safety, performance and consistency re-
quirements.
Performance and Safety Validator. This module
ensures that the robot’s behavior and performance re-
mains within safe and expected boundaries. To do
so, the validator acquires first the completed state
robot thanks to the state estimator and performance
assessor. The validator triggers the execution of the
TeSSLa runtime monitoring, implementing properties
P1–P5. If all monitors return positive evaluations, the
DT does not emit updates to TB3. However, if any
monitor flags a violation, the orchestrator activates the
Mitigation Module, using the validator outcomes as
parameters, to generate corrective actions and if nec-
essary update the Lidar data and actuate the robot con-
trol.
Uncertainty Mitigator. This module computes the
velocity updates and communicates the potentially
adjusted Lidar data, as corrective actions to certain
uncertainties, to the physical robot via MQTT inter-
face. Furthermore, it leverages the fully reconstructed
robot state from the DT and applies the control model
to determine appropriate actuation commands. De-
pending on the nature of the identified uncertainty,
the mitigation may consist of issuing updated veloc-
ity and steering commands to prevent unsafe motion
or trajectory deviation, as well as overriding the Lidar
data. By isolating this function, our DT minimizes
unnecessary intervention to TB3.
5 EXPERIMENTAL ANALYSIS
To analyze the effectiveness of our DT, we deploy
TB3 robot in an environment where different un-
certainties are synthesized artificially: low friction-
density floor due to a spongy layer, and highly steep
road slope. Figure 4 depicts the runtime analysis of
safety property P1. The plot shows that whenever the
distance to an obstacle is shorter than the actual safety
(braking) distance Ω(), i.e., possibility to collide, the
runtime monitor identifies this case and a mitigation
is triggered either to slow down (e.g., at t=44s) or
stop the acceleration (e.g., at t=36s) of the robot linear
speed. One can see that, our runtime monitors enable
to timely mitigate 70% of the uncertainties occurred.
Figure 5 analyzes the response time of DT. Note
that the communication time represents the major por-
tion of the latency. We analyzed the latency using 1)
Telegraf interface; 2) simple parameters parsing. One
can see that our response time outperforms the one
achieved using Telegraf, and is mostly within [0.143,
0.2] thus aligning with the robot sampling frequency
of 0.2s. However, there are few cases where the re-
sponse time can reach up to 0.25s leading TB3 to
miss a timely synchronization of the DT outcomes,
although we believe that an efficient scheduling of the
DT tasks (Boudjadar et al., 2016) can lead to maintain
a complete synchronization between the robot and its
DT.
Figure 6 depicts the mitigation of uncertainties re-
lated to the actual speed either larger than the maxi-
mum expected speed or lower than the minimum ex-
pected speed. It is trivial to see that the actual speed
is mostly within the acceptable range of [0, 0.22]. In
fact, the mitigation is triggered whenever the actual
speed is equal to the minimum or maximum expected
speeds, where most of the corrections are efficient
(e.g. 2.1s and 6.3s). However, due to larger mitiga-
tion latency, the corrective action impact might take
place late (e.g., 12.1s and 13.8s).
A Digital Twin Enabled Runtime Analysis and Mitigation for Autonomous Robots Under Uncertainties
101
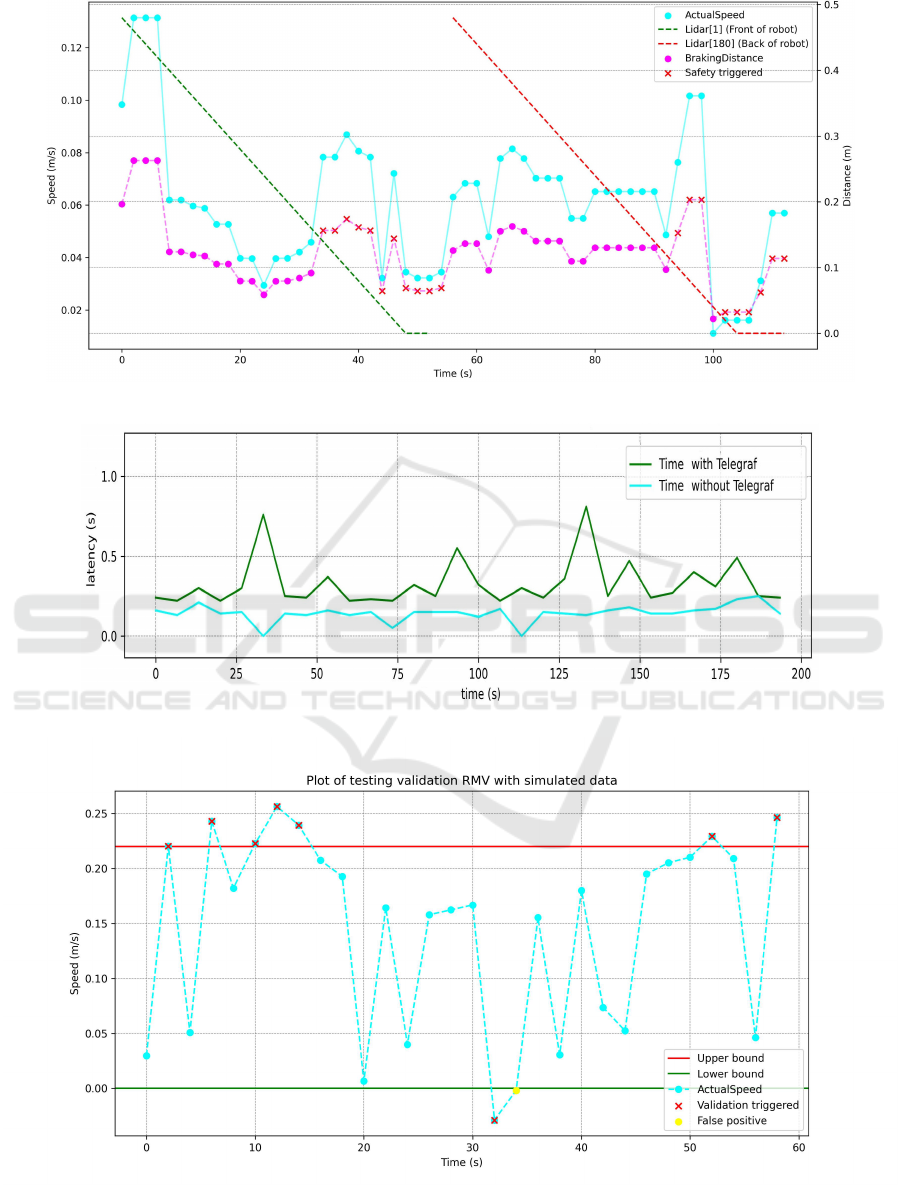
Figure 4: Runtime monitoring of the speed-related safety property.
Figure 5: System latency and execution time.
Figure 6: Runtime mitigation of the speed performance.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
102

6 CONCLUSIONS
This paper presented a digital twin-assisted methodol-
ogy to estimate runtime state and performance, iden-
tify, and mitigate uncertainties for an autonomous
mobile TB3 robot operating under unknown condi-
tions.
To mitigate the limitations of on-board processing,
we used the MQTT protocol to offload computations
to the cloud-hosted DT. In fact, DT reconstructs in-
complete or unreliable state data, while also perform-
ing runtime performance assessment and validation.
When inconsistencies are identified, thanks to a set
of TeSSLa runtime monitors, corrective actions in-
cluding data overrides and actuation adjustments are
issued to the robot. The experimental results show
that our DT can identify and mitigate 70% of relative
uncertainties, while it maintains synchronization with
TB3 in most of the cases.
As a future work, we plan to integrate extra safe-
guard monitors, optimize the DT latency and con-
sider intelligent strategies to mitigate the uncertain-
ties. Furthermore, additional real-world scenarios
will be considered for the experimental validation.
ACKNOWLEDGEMENTS
This research was supported by the RoboSAPIENS
project (Robotic Safe Adaptation In Unprecedented
Situations), funded by the Horizon Europe 2021-
2027 research and innovation programme under grant
agreement No 101133807.
REFERENCES
Abbadi, A. and Matousek, R. (2018). Hybrid rule-
based motion planner for mobile robot in cluttered
workspace. Soft Computing, 22:1815–1831.
Ahmadi, S. and Fateh, M. (2016). Robust control of electri-
cally driven robots using adaptive uncertainty estima-
tion. Computers & Electrical Engineering, 56:674.
Allamaa, J., Patrinos, P., Auweraer, H., and Son, T. (2022).
Sim2real for autonomous vehicle control using exe-
cutable digital twin. IFAC-Papers On Line, 55:385–
391.
Andalibi, M., Hajihosseini, M., Gheisarnejad, M.,
Khooban, M.-H., and Boudjadar, J. (2021). A novel
method for stabilizing buck-boost converters with cpl
using model prediction control. In 2021 22nd IEEE
International Conference on Industrial Technology
(ICIT).
Betzer, J. S., Boudjadar, J., Frasheri, M., and Talasila, P.
(2024). Digital twin enabled runtime verification for
autonomous mobile robots under uncertainty. In 2024
28th International Symposium on Distributed Simula-
tion and Real Time Applications (DS-RT).
Boudjadar, A., David, A., Kim, J. H., Larsen, K. G.,
Miku
ˇ
cionis, M., Nyman, U., and Skou, A. (2016).
Statistical and exact schedulability analysis of hierar-
chical scheduling systems. Science of Computer Pro-
gramming, 127:103–130.
Boudjadar, J. and Tomko, M. (2022). A digital twin setup
for safety-aware optimization of a cyber-physical sys-
tem. In ICINCO, pages 161–168.
Dobaj, J., Riel, A., Krug, T., Seidl, M., Macher, G.,
and Egretzberger, M. (2022). Towards digital twin-
enabled devops for cps providing architecture-based
service adaptation & verification at runtime. In 17th
Symposium On Software Engineering For Adaptive
And Self-Managing Systems.
Dulac-Arnold, G., Mankowitz, D., and Hester, T. (2019).
Challenges of real-world reinforcement learning.
arXiv preprint arXiv:1904.12901.
Feng, H., Gomes, C., Thule, C., Lausdahl, K., Iosifidis, A.,
and Larsen, P. (2021). Introduction to digital twin en-
gineering. In 2021 Annual Modeling And Simulation
Conference (ANNSIM), pages 1–12.
Filippone, G., García, J. A. P., Autili, M., and Pelliccione,
P. (2024). Handling uncertainty in the specification
of autonomous multi-robot systems through mission
adaptation. In Proceedings of the 19th International
Symposium on Software Engineering for Adaptive and
Self-Managing Systems.
Fontanelli, D., Shamsfakhr, F., Macii, D., and Palopoli,
L. (2021). An uncertainty-driven and observability-
based state estimator for nonholonomic robots. IEEE
Transactions on Instrumentation and Measurement,
70:1–12.
Hartley, R., Ghaffari, M., Eustice, R., and Grizzle, J. (2020).
Contact-aided invariant extended kalman filtering for
robot state estimation. The International Journal of
Robotics Research, 39:402–430.
Kaigom, E. G. and Roßmann, J. (2020). Value-driven
robotic digital twins in cyber–physical applications.
IEEE Transactions on Industrial Informatics, 17(5).
Kallwies, H., Leucker, M., Schmitz, M., Schulz, A., Thoma,
D., and Weiss, A. (2022). TeSSLa – an ecosystem for
runtime verification. In Runtime Verification Confer-
ence.
Kang, S., Chun, I., and Kim, H. (2019). Design and im-
plementation of runtime verification framework for
cyber-physical production systems. Journal of Engi-
neering, 2019:2875236.
Kim, D., Park, M., and Park, Y. (2021). Probabilistic mod-
eling and bayesian filtering for improved state estima-
tion for soft robots. IEEE Transactions on Robotics,
37:1728–1741.
Kok, B. C. and Soh, H. (2020). Trust in robots: Chal-
lenges and opportunities. Current Robotics Reports,
1(4):297–309.
Lee, J., Feng, J., Humt, M., Müller, M. G., and Triebel,
R. (2022). Trust your robots! predictive uncertainty
estimation of neural networks with sparse gaussian
A Digital Twin Enabled Runtime Analysis and Mitigation for Autonomous Robots Under Uncertainties
103

processes. In Conference on Robot Learning, pages
1168–1179. PMLR.
Lewis, F. L. and Ge, S. S. (2018). Autonomous Mobile
Robots: Sensing, Control, Decision Making and Ap-
plications. CRC Press.
Loquercio, A., Segu, M., and Scaramuzza, D. (2020). A
general framework for uncertainty estimation in deep
learning. IEEE Robotics and Automation Letters, 5(2).
Malik, M. F., Shahid, H., Saleem, M. H., Nazir, H., and
Nouman, A. (2023). Housekeeping using multi-agent
service robotics. In International Conference on
Robotics and Automation in Industry (ICRAI).
Ramesh, A., Stolkin, R., and Chiou, M. (2022). Robot vitals
and robot health: Towards systematically quantifying
runtime performance degradation in robots under ad-
verse conditions. IEEE Robotics and Automation Let-
ters, 7(4):10729–10736.
Rivera, L., Jiménez, M., Tamura, G., Villegas, N., and
Müller, H. (2021). Designing run-time evolution for
dependable and resilient cyber-physical systems using
digital twins. Journal of Integrated Design and Pro-
cess Science, 25:48–79.
Schmitt, T., Hanek, R., Beetz, M., Buck, S., and Radig, B.
(2002). Cooperative probabilistic state estimation for
vision-based autonomous mobile robots. IEEE Trans-
actions on Robotics and Automation, 18:670–684.
Singh, B., Kumar, R., and Singh, V. (2022). Reinforce-
ment learning in robotic applications: A comprehen-
sive survey. Artificial Intelligence Review, 55:945–
990.
Smyrnakis, M., Qu, H., Bauso, D., and Veres, S. (2020).
Multi-model adaptive learning for robots under uncer-
tainty. In ICAART (1), pages 50–61.
Stephens, A., Budd, M., Staniaszek, M., et al. (2024). Plan-
ning under uncertainty for safe robot exploration us-
ing gaussian process prediction. Autonomous Robots,
48:18.
Xu, W., He, D., Cai, Y., and Zhang, F. (2022). Robots’ state
estimation and observability analysis based on statis-
tical motion models. IEEE Transactions on Control
Systems Technology, 30:2030–2045.
Zhang, T. and Mo, H. (2021). Reinforcement learning for
robot research: A comprehensive review and open is-
sues. International Journal of Advanced Robotic Sys-
tems, 18.
Zhang, T., Peng, F., Yan, R., Tang, X., Deng, R., and Yuan,
J. (2024). Quantification of uncertainty in robot pose
errors and calibration of reliable compensation val-
ues. Robotics and Computer-Integrated Manufactur-
ing, 89.
Zhao, X. and Chidambareswaran, T. (2023). Autonomous
mobile robots in manufacturing operations. In 2023
IEEE 19th International Conference on Automation
Science and Engineering (CASE).
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
104
