
Hierarchical Coordination of UAVs for Dynamic Task Assignment in
Large-Scale Traffic Surveillance Missions
Teewende Boris kiema
1
, H
´
el
`
ene Piet-Lahanier
2
, Najett Neji
1
and Samia Bouchafa
1
1
Universit
´
e Paris Saclay, Univ Evry, IBISC Laboratory, Evry, France
2
DTIS, ONERA Universit
´
e Paris Saclay, Palaiseau, France
fi fi
Keywords:
Unmanned Aerial Vehicles, Multi-Agent Systems, Task Assignment, Mission Planning, Traffic Surveillance,
Centralized Control, Receding Horizon Control.
Abstract:
This paper presents an hierarchical coordination architecture for a fleet of UAVs dedicated to road traffic
surveillance over large urban areas. The system is built around a central drone, acting as a coordinator, which
is responsible for monitoring the status of the fleet and dynamically assigning surveillance tasks in response
to reported traffic events. To ensure scalability and responsiveness, our architecture combines a spatial clus-
tering mechanism to partition mission area and distribute drones accordingly, with a receding horizon task
assignment (RHTA) strategy within each sub-region. The fleet coordination requires designing specific trajec-
tories for the central drone to ensure communication within the fleet and periodic updates of the surveillance
information. This hybrid approach enables adaptive, region-based task allocation while preserving a global
overview through the coordinator. Simulation results highlight the relevance and flexibility of the proposed
coordination scheme when addressing dynamic and large-scale surveillance scenarios.
1 INTRODUCTION
Unmanned Aerial Vehicles (UAVs) have emerged as
a promising solution for traffic surveillance (Khan
et al., 2020), (Butil
˘
a and Boboc, 2022). Thanks to
their mobility, flexibility, and relatively low deploy-
ment cost, UAVs can provide rapid situational aware-
ness over wide areas, complementing fixed infras-
tructure such as Closed-Circuit TeleVision (CCTV)
(e.g. by (Kurdi, 2014)) or road sensors (Bernas et al.,
2018), (Akhtar and Moridpour, 2021).
Road traffic surveillance is essential for enhancing ur-
ban mobility (Christodoulou and Kolios, 2020), en-
suring safety, and responding effectively to incidents
(Kiema et al., 2025). However, the real-time monitor-
ing of large-scale road network remains a challenging
task due to the complexity, and dynamic nature of ur-
ban traffic.
Many approaches have been suggested to use fleet of
UAVs for coordinated surveillance application focus-
ing on the multi-UAV task assignment, (Alqefari and
Menai, 2025). These methods vary in terms of ar-
chitecture (centralized, decentralized or hybrid), mis-
sion assumptions (static or dynamic task appearance),
and task allocation logic such as greedy, clustering,
auction-based. The coordination strategies in surveil-
lance applications generally categorized into offline
and online schemes. Offline approaches assume full
knowledge of all tasks beforehand and often rely on
formulations such as the multi-Traveling Salesman
Problem (TSP) as proposed by (Luo et al., 2021); or
on the Vehicle Routing Problem (VRP) in (Wang and
Sheu, 2019). Online strategies can be time-triggered,
based on periodic updates, or event-driven, where ac-
tions are triggered only when specific events occur.
Event-driven coordination is particularly suited for
dynamically assigning tasks as new incidents are re-
ported or mission constraints evolve during execution.
Several techniques have been explored for this pur-
pose, including greedy nearest-neighbor dispatching,
clustering-based assignment (Ma and Chen, 2023),
and market-based methods (Ham and Agha, 2007).
Receding Horizon Task Assignment (RHTA) has
emerged as a promising alternative for dynamic task
allocation, capable of balancing reactivity and fore-
sight. They consist in solving a local optimization
problem over a finite prediction horizon, executing
only the first action, and updating the plan at each
decision step. Applications of RHTA have been pro-
posed in both decentralized (Peterson et al., 2020) and
centralized (Ma and Chen, 2023), (Cassandras and Li,
2003) frameworks, often integrating task allocation
290
kiema, T. B., Piet-Lahanier, H., Neji, N. and Bouchafa, S.
Hierarchical Coordination of UAVs for Dynamic Task Assignment in Large-Scale Traffic Surveillance Missions.
DOI: 10.5220/0013746700003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 290-297
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

and trajectory planning into a single loop.
Among centralized online approaches, cloud-based
architectures have received particular attention in re-
cent years (Allahbakhsh et al., 2019). In such sys-
tems, task assignment decisions are made by a remote
cloud server with access to global mission data. These
architectures offer computational scalability and fa-
cilitate fleet-wide optimization, but rely heavily on
continuous connectivity. As a result, they may suf-
fer from latency and reduced robustness in scenar-
ios with intermittent communication or infrastructure
limitations. An alternative approach consists in hier-
archizing the fleet and attributing specific features to
one of the UAV, (Xu et al., 2021). This enables fast
and flexible deployment at the cost of designing dif-
ferent trajectories depending on the role attributed to
the UAVs.
Despite these advances, relatively few approaches
decouple high-level task assignment from low-level
control, or address centralized RHTA in event-driven
scenarios triggered by real-time incident reports. In
the following, we propose a centralized coordination
strategy that explicitly separates high-level task allo-
cation from low-level trajectory execution. Task as-
signment is handled by a Receding Horizon Task Al-
location (RHTA) mechanism, which is triggered upon
the appearance of new Points of Interest (PoIs). A PoI
refers either to a predefined location associated with a
potential traffic incident requiring surveillance, or to
a real-time incident report provided by traffic applica-
tions such as Waze (Waze Mobile Ltd., 2024).
A Model Predictive Control (MPC) scheme (Rawl-
ings et al., 2017) is employed for the guidance of
the fleet, with mission-specific objectives. The co-
ordinating UAV applies MPC to optimize its reposi-
tioning strategy based on fleet connectivity, enabling
effective supervision and continuous information up-
dates. Meanwhile, the other UAVs use local MPC
controllers to efficiently reach and monitor their as-
signed PoIs, with surveillance-focused criteria; the
detailed implementation of the other UAV control is
discussed in a separate study.
The key contributions of this work are as follows:
- Architectural separation of concerns: The RHTA
handles task decisions at the fleet level, while each
UAV locally manages its motion through a low level
MPC. This modularity enhances scalability, flexibil-
ity and facilitates implementation.
- Hierarchical control structure: A high-altitude
UAV supervises the fleet and acts as a coordina-
tion hub, continuously repositioning itself to maintain
communication with as many spotter UAVs as possi-
ble, while simultaneously managing task distribution
and global awareness.
- Event-driven dynamic assignment: Unlike pe-
riodic planning schemes, our RHTA mechanism is
activated only upon the appearance of new PoIs,
typically reported through real-time traffic platforms
such as Waze. This makes the system reactive and
communication-efficient.
- Hybrid planning approach: We combine an ini-
tial offline spatial clustering of PoIs for load balancing
and regional assignment, with an online, event-driven
task reassignment mechanism based on RHTA, allow-
ing UAV tasking to adapt dynamically to real-time in-
cident reports and fleet availability.
The remainder of this paper is organized as follows.
Section 2 formulates the problem and presents the
UAV model and mission constraints. Section 3 de-
tails the proposed coordination strategy, including the
initial spatial clustering, the online task assignment
mechanism, and the central UAV’s route planning
strategy. Simulation results and evaluation metrics are
provided in Section 4. Finally, Section 5 concludes
the paper and outlines future work directions.
2 PROBLEM STATEMENT
We consider a UAV-based surveillance system for
road traffic monitoring over a large urban area called
Z. In this zone, N points can be distinguished as
Points of interest (PoI) which correspond to locations
of incident occurences. They are located at X
i
(x, y)
for i = 1, . . . , N. An a priori probability of incident
P(IC) and a class index indicating the type of inci-
dents most likely to occur are associated to each PoI.
The area is represented as a graph G(X
i
, R
i, j
), where
nodes correspond to PoI locations and R
i, j
represents
the connecting line between nodes.
The fleet of drones is structured hierarchically. A cen-
tral UAV, denoted uav
0
, operates at high altitude and
is in charge of coordinating the fleet, managing the
task assignments, and maintaining the global aware-
ness of the mission state. The remaining drones, re-
ferred as spotter UAVs, uav
i
, i = 1, . . . , n
d
operate at a
lower altitude and are responsible for observing the
assigned PoIs using a downward-facing camera for
incident detection. Each spotter drone has physical
and operational constraints, including a bounded ve-
locity v
max
, limited flight autonomy t
limit
, and a hover-
ing time above the PoI, t
h
. Communication between
the central UAV and the spotter UAVs must be main-
tained throughout the mission, subject to a maximum
communication range constraint R
com
.
The mission objectives are threefold: (i) to maximize
the coverage of high-priority PoIs under time and en-
ergy constraints, (ii) to dynamically reassign tasks in
Hierarchical Coordination of UAVs for Dynamic Task Assignment in Large-Scale Traffic Surveillance Missions
291
response to evolving mission conditions, (iii) to main-
tain a scalable and modular coordination framework
suitable for large-scale deployments.
2.1 UAV Model
We consider a simplified discrete-time kinematic
model of an UAV operating in a three-dimensional
environment. The dynamics is modelled as a double
integrator, which is discretized for practical integra-
tion.
The state vector at time step k is defined as x
k
=
[p
k
, v
k
]
T
∈ R
6
, where the UAV position is given by
p
k
= [x
k
, y
k
, z
k
]
T
, and v
k
= [v
x
k
, v
y
k
, v
z
k
]
T
denotes its lin-
ear velocity in the 3D coordinates in the reference
frame.
The control input u
k
= [u
x
k
, u
y
k
, u
z
k
]
T
∈ R
3
corresponds
to the accelaration command in each direction. The
discrete-time dynamics over a sampling period of
time ∆
t
are given by eq. 1:
x
k+1
=
p
k
+ ∆
t
· v
k
+
1
2
∆
2
t
· u
k
v
k
+ ∆
t
· u
k
(1)
which is expressed in the state-space form as:
x
k+1
= Ax
k
+ Bu
k
(2)
with:
A =
I
3
∆
t
I
3
0 I
3
, B =
1
2
∆
2
t
I
3
∆
t
I
3
(3)
For the MPC design, we take into account the physi-
cal limitations of the drones such as maximum accel-
erations, as well as the control rate bounds to ensure
feasible and safe trajectories by avoiding aggressive
maneuvers.
3 GLOBAL APPROACH
The surveillance targets, referred to as Points of Inter-
est (PoIs), correspond to locations on road segments
or intersections associated with a non-zero probabil-
ity of incident occurrence. These PoIs are assumed
to be known a priori, either extracted from historical
data (e.g. open datasets reporting road traffic statis-
tics (ONISR, 2024)) or derived from traffic applica-
tions such as Waze, which provide real-time alerts.
The coordination strategy unfolds in two layers: (1)
Initial deployement layer section 3.1 and (2) Reactive
task allocation layer section 3.2. Moreover, the de-
scription of the central uav route planner is given in
section 3.3.
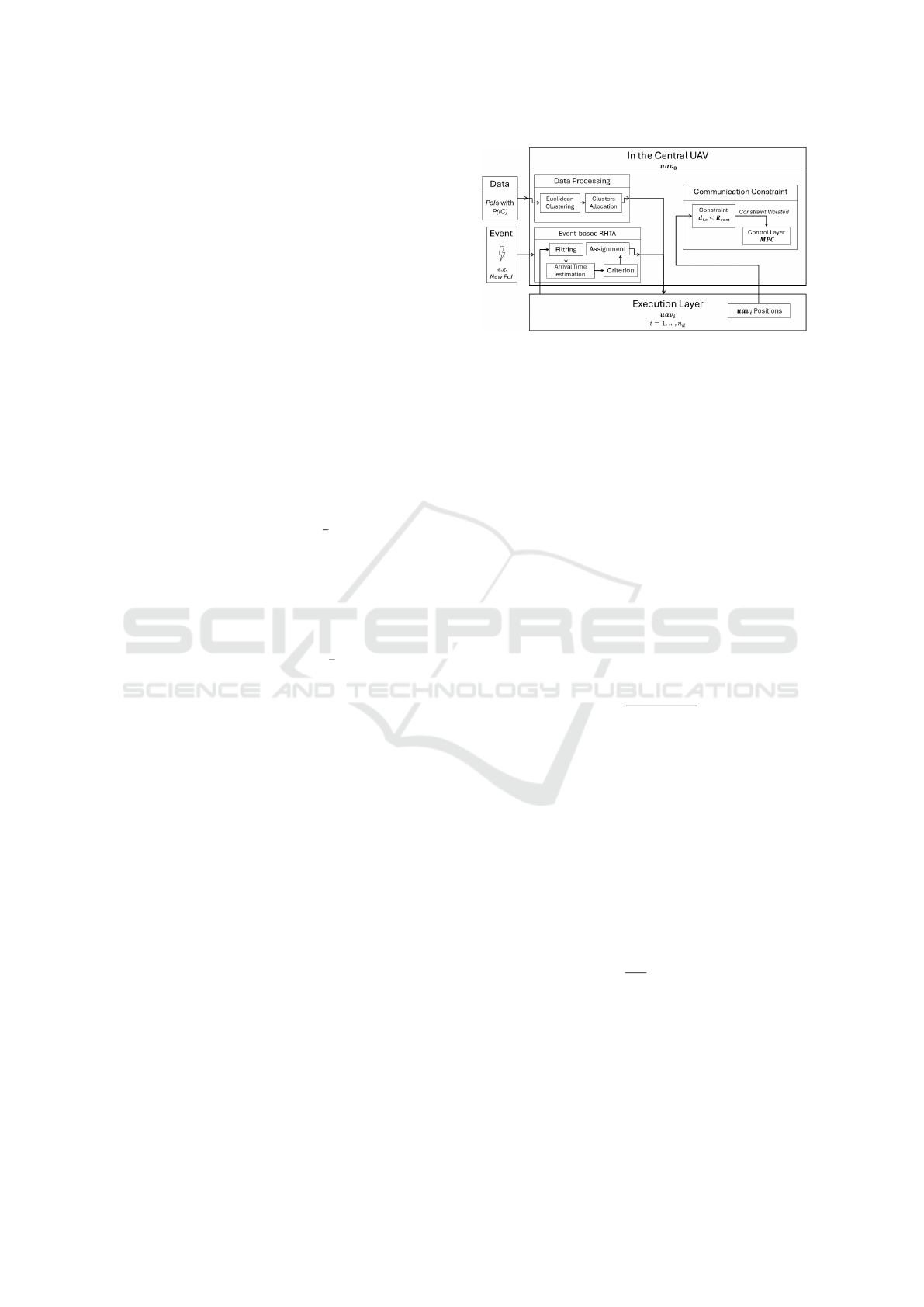
Figure 1: Functional architecture of the proposed coordina-
tion strategy, executed within the central UAV uav
0
. The
system combines data-driven clustering, event-triggered
task reassignment, and communication-aware control to su-
pervise a fleet of spotter drones (uav
i
).
3.1 Spatial Clustering for Regional
Assignment
To efficiently distribute surveillance tasks across the
UAV fleet, we perform an initial spatial partitioning
of the Points of Interest (PoIs). Let C be the set of
known PoI positions X
i
, and let n
d
be the number of
required spotter UAVs, each with a limited flight en-
durance t
limit, j
. Let T
i
denote the estimated time re-
quired for a UAV to travel from the center of the area
to PoI i, hover for observation, and return. The to-
tal required time to cover all PoIs is approximated by
∑
N
i=1
T
i
, which allows estimating the minimum num-
ber of UAVs needed as:
n
d
=
∑
N
i=1
T
i
min(t
limit, j
)
(4)
The set C is then partitioned into n
d
spatial clusters
(Rokach and Maimon, 2005) using the standard k-
means algorithm briefly reminded here. We minimize
the intra-cluster variance:
µ
i
= arg min
µ
i
n
d
∑
i=1
∑
X
j
∈C
i
∥X
j
− µ
i
∥
2
!
(5)
where µ
i
denotes the centroid of cluster C
i
and X
j
the
PoI locations. Initialization is done by randomly sam-
pling n
d
centroids within the area. Each PoI is as-
signed to the closest centroid, and they are updated
iteratively as:
µ
i
=
1
|C
i
|
∑
X
j
∈C
i
X
j
(6)
Once the clusters C
i
are formed, each characterized
by its centroid µ
i
, the candidate cluster i is allocated
to the closest available UAV based on euclidean dis-
tance between the UAV position X
uav
and the cluster
centroid µ
i
:
j
∗
= arg min
j
∥µ
i
− X
uav
j
∥ with i, j = 1, . . . , n
d
; (7)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
292

j
∗
is the UAV assigned to cluster C
i
. This clustering
serves as an initial spatial decomposition of the mis-
sion space, allowing each uav
i
to focus on a specific
region. Within each cluster, the initially known PoIs
are scheduled using a route optimization strategy en-
abling each UAV to plan an efficient surveillance path.
The detailed design and evaluation of this task alloca-
tion process have been addressed in a different study.
Within a cluster, the uav
i
performs three main tasks:
(i) hovering above PoIs to collect observational
data, (ii) collecting and updating incident information
based on visual inspection, and (iii) rallying PoIs dur-
ing the mission. When a traffic incident is detected or
reported in real time; the central UAV manages the in-
tegration and reassignment of these new tasks online
using a Receding Horizon Task Allocation (RHTA)
mechanism.
3.2 Online Receding Horizon Task
Allocation
During the mission, an event which can be defined as
the dynamic appearance or disappearance of PoIs, for
instance upon receiving a real-time traffic incident re-
port through an external source such as Waze. In ad-
dition, onboard observations performed by the spotter
UAVs during their hovering tasks can also lead to the
confirmation, creation, or removal of PoIs, dynami-
cally updating the incident probability map. These
PoIs, which were not part of the initial spatial cluster-
ing, require prompt integration into the mission plan.
To handle such events, the central UAV triggers an
Online RHTA mechanism. This mechanism is acti-
vated only while an event is detected rather than fol-
lowing a fixed time schedule, thereby making the sys-
tem event-driven. At each triggering event, the central
UAV evaluates the status of all spotter UAVs to deter-
mine which one is the most suitable to handle this new
task i.e reaching and overseeing the newly reported or
removed PoI. The online RHTA follows the steps be-
low:
(1) Pre-filtering of PoI: A PoI is integrated into the
task allocation process only if its incident probabil-
ity P(IC) exceeds a predefined threshold P(IC)
min
.
The threshold is not fixed globally, but varies depend-
ing on the average number of incident reports in the
corresponding region. The adaptive thresholding en-
sures that areas with low traffic activity are not pe-
nalized by an overly strict filtering, while busy areas
are protected against noise from uncertain or weakly
confirmed reports. This pre-filtering step avoids dis-
turbing the UAV fleet coordination due to uncertain or
weakly confirmed incident reports.
(2) Filtering of available UAVs: UAVs currently ex-
ecuting a hypothesis test (i.e., hovering over a PoI
to validate the presence or absence of an incident)
are excluded from the candidate list. For UAVs ral-
laying a PoI, we compute their estimated time of ar-
rival t
ETA, j
. A UAV is considered interruptible only if
this value exceeds a switching threshold t
switch
. This
avoids reassigning a drone that is near completing its
current mission.
(3) Computation of effective arrival time: For each
eligible UAV j, we compute the total time before it
can reach the new PoI:
t
eff, j
= t
free, j
+t
path, j
(8)
where t
path, j
is the estimated time needed to reach the
new PoI from its future position and t
free, j
is given by:
t
free, j
=
(
0, if the UAV is idle,
d
rem
v
average
+t
h
, if rallying a PoI.
(9)
where t
h
is the hovering time, d
rem
is the remain-
ing distance form the current location to the PoI, and
v
average
is the average drone velocity.
(4) Scoring Function. A global cost function is
evaluated for each candidate UAV:
f
j
= α · t
eff, j
− β · P(IC) + γ ·
1 −
t
residual, j
t
limit, j
(10)
where:
- t
eff, j
(eq. 9) represents the effective time for UAV j
to finish the current mission, reach the new PoI and
start observations. It promotes responsiveness by en-
couraging the assignment of tasks to UAVs that can
act quickly.
- P(IC) is the probability of incident occurrence at
the PoI, which gives priority to higher-risk locations
by reducing the overall cost.
- t
residual, j
is the UAV’s remaining flight time, and the
term
1 −
t
residual, j
t
limit, j
penalizes UAVs with limited re-
maining energy to favor tasking UAVs with sufficient
endurance.
The weighting coefficients α, β, and γ allow balanc-
ing the relative importance of responsiveness, inci-
dent criticality, and energy robustness. After the pre-
filtering step based on the minimum reliability thresh-
old P(IC)
min
, the coefficient β can be tuned to reflect
that all considered PoIs have already met an accept-
able reliability level.
(5) Assignment: The UAV j with the lowest cost is
selected and assigned to the new PoI (eq. 11):
j
∗
= arg min
j
f
j
(11)
The selected UAV updates its trajectory accordingly
via its low level MPC controller, integrating the new
task into its current flight plan.
Hierarchical Coordination of UAVs for Dynamic Task Assignment in Large-Scale Traffic Surveillance Missions
293

3.3 Route Planner and Control Layer
The uav
0
implements a connectivity-aware MPC
strategy that proactively adapts its position within the
surveillance area. The objective is to maximize the
communication robustness with the uav
i
while mini-
mizing unnecessary motion.
Figure 2: Representation of the UAV coordination architec-
ture.
3.3.1 Connectivity-Based Cost Function
As information is fed back from the spotter drones
to the central, it is essential to ensure uninterrupted
communication between the uav
0
and uav
i
for a des-
ignated period of time t
com
. The connectivity-based
function J
c
qualifies the expected level of communi-
cation in the fleet over a prediction over the predic-
tion horizon N
p
(eq. 12). This cost penalizes large
distances between uav
0
and uav
i
, especially for those
that have not communicated recently (weighting ratio
eq. 13).
J
c
=
N
p
−1
∑
k=0
x
c
(k) −
1
∑
n
d
i=1
ρ
w,i
(k)
n
d
∑
i=1
ρ
w,i
(k)x
i
(k)
2
(12)
where :
• x
k
c
= [x
k
c
, y
k
c
, z
k
c
]
T
, x
k
i
= [x
k
i
, y
k
i
, z
k
i
]
T
represents re-
spectively the predicted position of the central
UAV and the spotters at step k,
• ρ
k
w,i
is the dynamic weight prioritizing uav
i
being
disconnected for a longer period of time (eq. 13),
• R
com
is the communication constraint.
ρ
w,i
is defined as:
ρ
w,i
=
t
elapsed,i
t
com
2
(13)
where t
elapsed,i
is the time since the last communica-
tion with uav
i
, and t
com
is the maximum allowed time
without communication.
Eq. 13 ensures that the uav
0
encouraged to reposition
toward uav
i
at risk of losing contact, or which has not
been in contact for a long time.
3.3.2 Event-Triggered Repositioning Strategy
For energy consumption consideration, the central
drone (uav
0
) has to move only when the commu-
nication is degraded within the fleet (eq. 15). At
each time step, we monitor the elapsed communica-
tion time (t
elapsed,i
) for each spotter. The reposition-
ning is trigerred based on a temporal indicator t
conn
defined as:
t
conn
=
1
n
d
n
d
∑
i=1
t
ε
elapsed,i
(14)
The parameter ε ≥ 1 is a tuning exponent that in-
creases the influence of longer delays (outliers). A
new optimization problem is solved, when eq. 15 is
satisfied.
t
conn
> t
λ
com
(15)
where t
com
denotes the maximum tolerable period of
time without communication with uav
0
, and λ ∈ [0, ε[
is a parameter. The two tuning parameters choice
must be done following the condition ε > λ. The sen-
sitivity of the repositioning mechanism depends di-
rectly on the choice of these two parameters, which
control the threshold and responsiveness of the trig-
gering condition.
3.3.3 MPC Connectivity Optimization Problem
When repositioning is needed (eq. 15), the optimiza-
tion criterion (eq. 16) allows to determine its further
actions :
min
u(0:N
p
−1)
J
MPC
= J
c
+
N
p
−1
∑
k=0
u(k)
T
Ru(k) (16)
subject to the system dynamics (eq. 2) over the pre-
diction horizon N
p
and following constraints:
x
min
c
≤ x
c,k
≤ x
max
c
∀ k (17)
u
min
≤ u
k
≤ u
max
∀ k (18)
where:
• u
k
is the control input at step k,
• R is a positive definite matrix weighting control
effort minimization,
• x
min
c
and x
max
c
represent the lower and upper
bounds on the state vector. The position limits
correspond to the size of the environment and the
velocity limits are set according to the maximum
speed allowed along each axis.
The optimization problem (eq. 16) is solved using a
Quadratic Programming (QP) solver.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
294
4 SIMULATION AND RESULTS
The effectiveness of the proposed coordination archi-
tecture is presented in this section.
4.1 Simulation Setup
The surveillance zone is modeled as a square area of
1500 ×1500 m
2
, within which a set C of Points of In-
terest (PoIs) is randomly distributed. Each PoI is as-
sociated with 2D coordinates X
i
, a probability of inci-
dent occurrence P(IC), and a type of incident. Three
incident classes are considered in the scenario: acci-
dent, traffic congestion, and pothole.
All UAVs follow the dynamic model defined in sec-
tion 2.1. The spotter UAVs have a limited flight time
of t
limit
= 30 min and a sensing range defined by a
Field of View (FoV) of 30 m. Communication be-
tween drones is constrained by a maximum range
R
com
= 300 m.
Given the autonomy of the UAVs and the area to
supervise, four low-altitude spotter drones uav
i
, fly-
ing at a fixed altitude Z
LA
= 20 m, and one high-
altitude central UAV uav
0
(blue line in fig. 3) flying at
Z
HA
= 30 m. When assigned to observe a PoI, a UAV
hovers above it for a fixed duration t
h
= 120 s. In all
simulations, the number of PoIs is set to N = 55, with
random placement and incident probability sampled
uniformly. t
elasped,i
of all uav
i
are also randomly ini-
tialized to test the response of the system and ε = 3,
λ = 2.
For simplicity and clarity of analysis, the simulations
are carried out in a two-dimensional environment.
We aim to illustrate the effectiveness of the central-
ized task assignment strategy, the benefits of spatial
clustering, and the role of the central UAV in main-
taining communication and coordination efficiency.
4.2 Results Analysis
To validate the proposed coordination architecture,
we conducted a series of numerical simulations. We
first present a single, illustrative mission scenario to
provide a qualitative understanding of the system’s
behavior. Subsequently, we present a comprehen-
sive Monte Carlo analysis to quantitatively assess the
strategy’s robustness against various forms of uncer-
tainty.
4.2.1 Illustrative Mission Scenario
To provide a qualitative overview of the system in op-
eration, a representative mission is depicted in Fig.
3. In this scenario, the fleet is tasked with survey-
ing a set of randomly distributed PoIs, with dynamic
events occurring during the mission.The simulation is
initialized with one spotter UAV exceeding the com-
munication timeout threshold t
com
(fig. 4), thereby
stress-testing the event-triggered repositioning mech-
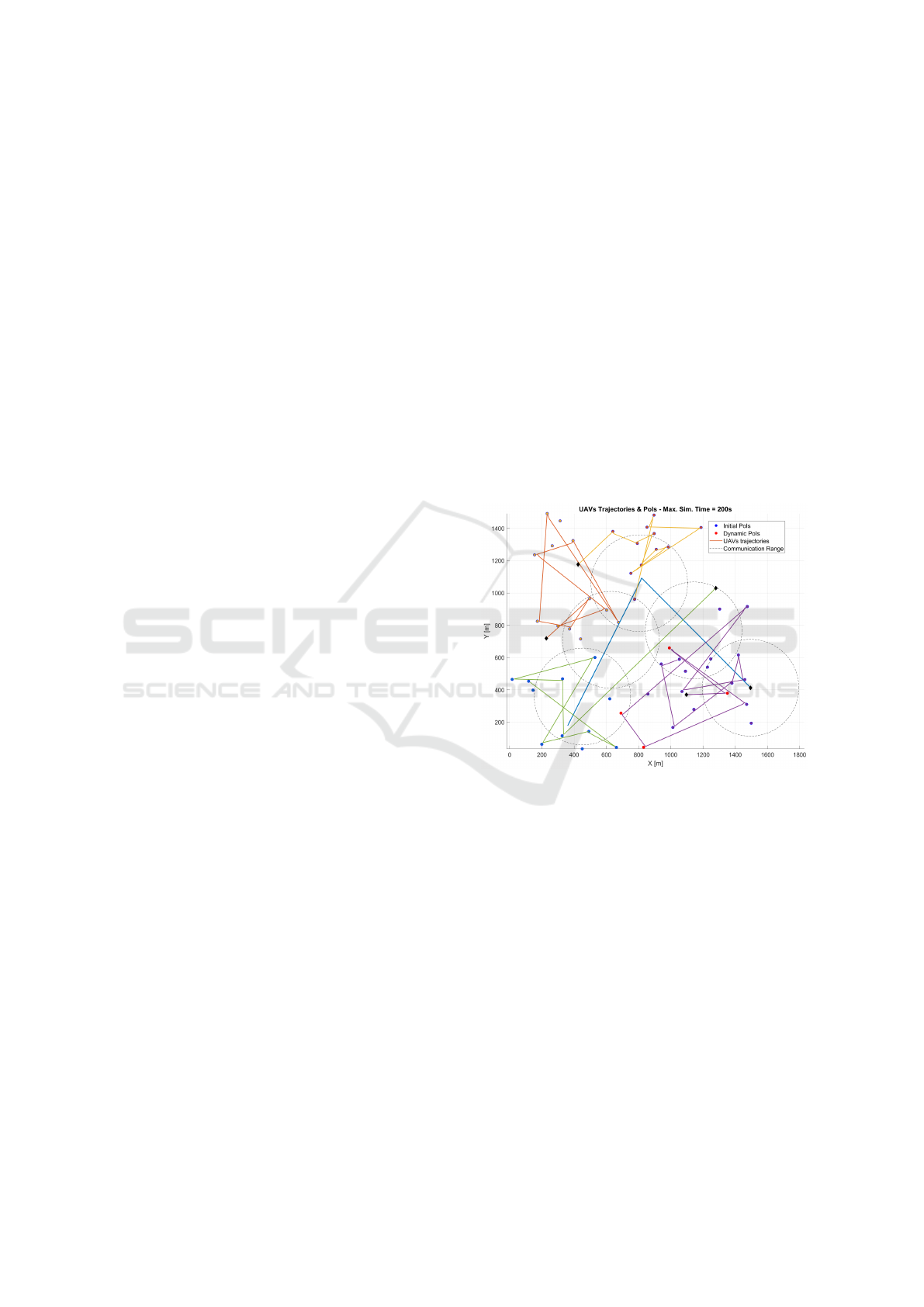
anism. As a result of the presented approach (fig. 3),
we get more than 70% spatial coverage with the flight
time constraint. A spatial coverage means that all
PoIs (static and dynamic) were visited. Furthermore
we have an average detection-to-service delay below
70s for all visited PoIs. With a low number of reposi-
tioning of the uav
0
N
rep
= 3, the event-triggered strat-
egy proves its effectiveness while keeping the fleet
connected for 90% of the mission time (fig. 4). N
rep
varies accordingly to t
com
. More strict t
com
(fig. 4b)
leads to more repositioning N
rep
= 7. This first result
shows as that the central-UAV repositioning under-
line that the central MPC (section 3.3.3) is invoked
only when connectivity genuinely degrades, thereby
saving global energy.
Figure 3: Mission overview – Executed trajectories of the
central UAV, with 4 uav
i
. The central UAV periodically
re-positions to maximise fleet connectivity while spotters
visit their local PoIs. The circle represents the communica-
tion constraint R
com
.
4.2.2 Monte Carlo Robustness Analysis
While a several and isolated run illustrates feasi-
bility, a comprehensive Monte Carlo analysis was
performed to rigorously evaluate the system’s perfor-
mance under uncertainty. The analysis consisted of
100 simulation runs for each of two distinct scenarios,
each designed to challenge a specific aspect of the
architecture’s robustness.
Scenario A:
This scenario addresses the challenge of deployment
uncertainty. The initial spatial disposition of the
spotter UAVs was randomized in each of the 100
Hierarchical Coordination of UAVs for Dynamic Task Assignment in Large-Scale Traffic Surveillance Missions
295
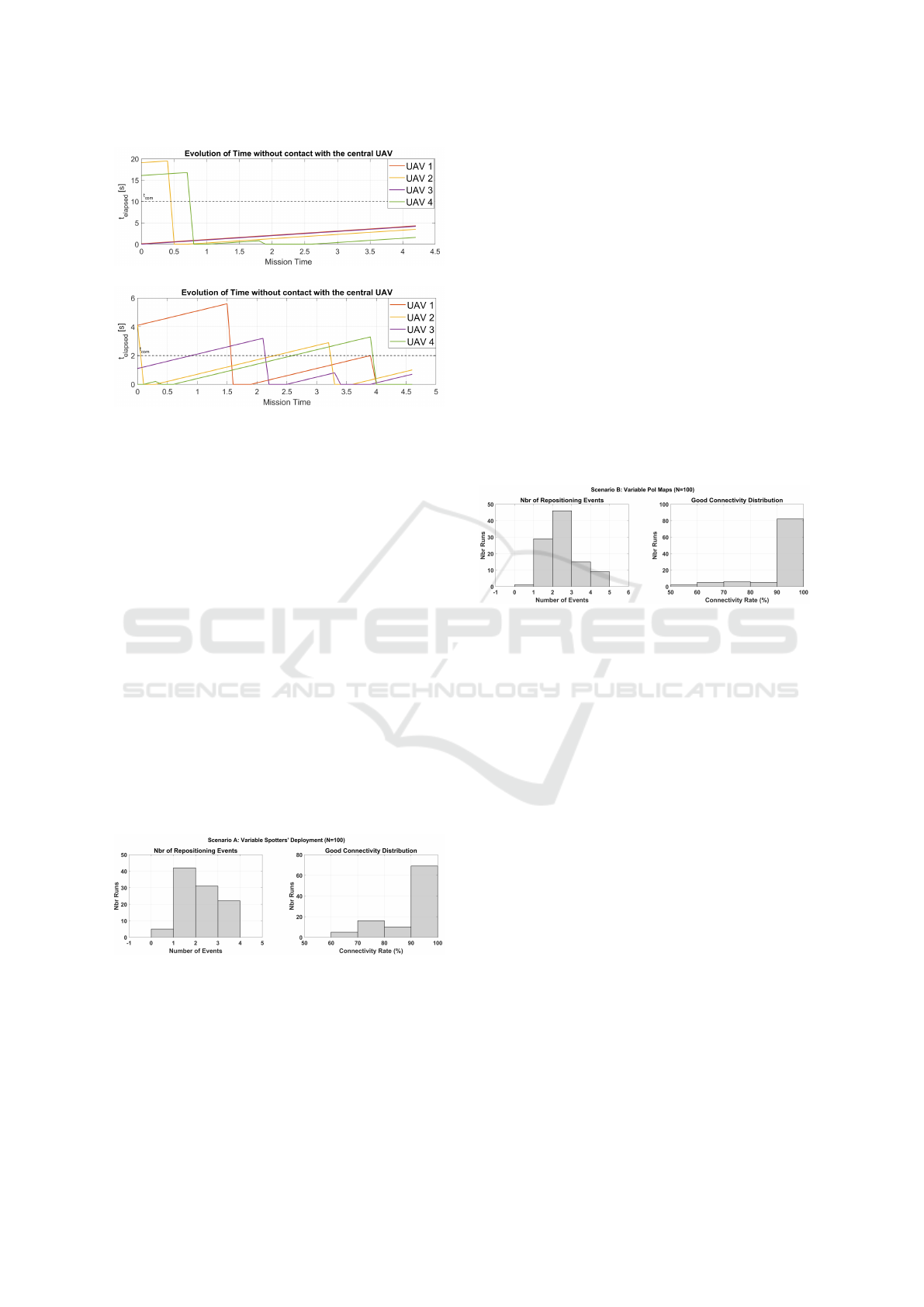
(a)
(b)
Figure 4: Time since last contact for each spotter UAV
during the mission. The dashed horizontal line marks the
communication limit t
com
= 10s in (a) and t
com
= 2s in (b).
Spikes above this threshold trigger the MPC-based reposi-
tioning of the central UAV; the quick return below the limit
confirms that connectivity is promptly restored.
runs. The objective is to verify that the strategy’s
performance is not contingent on a favorable or
manually selected starting configuration, but is robust
across a wide spectrum of initial fleet deployments.
The results for scenario A (fig. 5) provide strong
quantitative evidence of the strategy’s robustness.
The system’s effectiveness is confirmed by a high
fleet-wide connectivity rate, which exceeded 95%
in over 70% of the tested scenarios. This high
performance was achieved with significant effi-
ciency, requiring a mean of only 1.76 repositioning
maneuvers per mission, which validates the par-
simonious nature of the event-triggered approach.
Furthermore, the system demonstrated consistent
reactivity, allowing a reliable and prompt recovery
from communication loss.
Figure 5: Performance Distributions for Scenario A
(Variable Spotters’ Deployment).
Scenario B:
This scenario is designed to evaluate the system’s
robustness to mission uncertainty. For each run,
the entire map of PoIs was randomly regenerated.
This tests the ability of the initial spatial clustering
algorithm to handle varied mission geometries and
ensures that the RHTA mechanism is effective across
different task distributions.
The analysis of the performance metrics across
all 100 simulations reveals that the coordination
architecture demonstrated strong resilience when
faced with these more complex mission geometries.
Theses results are shown in fig. 6. First, the system
adapted more frequently, as evidenced by the mean
number of repositioning events, which rose to 2.05
per mission. This indicates that the controller actively
compensated for the increased fleet dispersion and
furthermore that the controller’s reactivity remained
consistent. Most significantly, the primary mission
objective was largely achieved. In over 80% of
cases, the good connectivity rate remained above
95%, proving that even with an imperfect initial
assignment, the dynamic repositioning strategy can
effectively compensate to ensure fleet cohesion.
Figure 6: Performance Distributions for Scenario B
(Variable PoI Maps).
4.3 Selective Desactivation Study
Although a full numerical ablation is left for future
work, we provide here a qualitative assessment of the
role of each module in the architecture.
- Without Spatial Clustering: All UAVs are
allowed to compete for all PoIs. As a result, task
overlap increases, especially in dense zones, and
UAVs frequently select conflicting or suboptimal
assignments. This leads to greater trajectory overlap
and higher risk of conflicting trajectories. Moreover,
the absence of regional decomposition reduces over-
all scalability and requires additional logic for conflict
resolution, which is avoided in our modular approach.
- Without RHTA: The task assignment process
is static per cluster and does not adapt to real-time
incident appearance. UAVs will visit a pre-assigned
lists of PoIs, regardless the appearance of new
incident and the availability of nearby UAVs. This
may result in slower response times for and missed
opportunities to effectively oversee a new PoI.
Although spatial clustering ensures workload balance
at the start, the lack of reactivity penalizes the system
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
296

under dynamic conditions.
5 CONCLUSION
In this paper, we proposed a centralized coordination
architecture for UAV-based traffic surveillance, com-
bining spatial clustering, event-driven task allocation,
and a communication-aware guidance strategy for the
central UAV. The proposed system is designed to re-
main scalable and responsive to real-time incident re-
ports, while ensuring communication robustness and
balanced task distribution across the fleet.
A particular focus was placed on how the central UAV
uses a receding-horizon task assignment strategy to
dynamically select its next positioning target, priori-
tizing fleet-wide communication. The resulting mo-
tion plan is executed via a Model Predictive Con-
trol scheme that guarantees constraint satisfaction and
smooth trajectory tracking.
Further work includes design of spotters trajectories
to follow the road maps to enhance patrolling effi-
ciency and methods for realistic detection and iden-
tification of new PoIs.
REFERENCES
Akhtar, M. and Moridpour, S. (2021). A review
of traffic congestion prediction using artificial in-
telligence. Journal of Advanced Transportation,
2021(1):8878011.
Allahbakhsh, M., Rahmani, A. M., Moustafa, N., Ranjan,
R., Khan, S. U., and Zomaya, A. Y. (2019). A cloud-
based system for real-time autonomous task assign-
ment of a fleet of drones. Future Generation Com-
puter Systems, 93:335–348.
Alqefari, S. and Menai, M. E. B. (2025). Multi-uav task
assignment in dynamic environments: Current trends
and future directions. Drones, 9(1):75.
Bernas, M., Płaczek, B., Korski, W., Loska, P., Smyła, J.,
and Szymała, P. (2018). A survey and comparison of
low-cost sensing technologies for road traffic monitor-
ing. Sensors, 18(10):3243.
Butil
˘
a, E. V. and Boboc, R. G. (2022). Urban traffic mon-
itoring and analysis using unmanned aerial vehicles
(uavs): A systematic literature review. Remote Sens-
ing, 14(3):620.
Cassandras, C. G. and Li, W. (2003). A receding horizon ap-
proach for dynamic uav mission management. In En-
abling Technologies for Simulation Science VII, vol-
ume 5091, pages 284–293. SPIE.
Christodoulou, C. and Kolios, P. (2020). Optimized tour
planning for drone-based urban traffic monitoring.
In 2020 IEEE 91st Vehicular Technology Conference
(VTC2020-Spring), pages 1–5. IEEE.
Ham, M. and Agha, G. (2007). Market-based coordination
strategies for large-scale multi-agent systems. System
and Information Sciences Notes, 2(1):126–131.
Khan, N. A., Jhanjhi, N., Brohi, S. N., Usmani, R. S. A.,
and Nayyar, A. (2020). Smart traffic monitoring sys-
tem using unmanned aerial vehicles (uavs). Computer
Communications, 157:434–443.
Kiema, T. B., Piet-Lahanier, H., Neji, N., and Bouchafa, S.
(2025). Road patrol with traveling salesman formula-
tion. In Proceedings of the 1st Inter. Conf. on Drones
and Unmanned Systems, p. 222-224.
Kurdi, H. A. (2014). Review of closed circuit television
(cctv) techniques for vehicles traffic management. In-
ter. Journal of Computer Science & Information Tech-
nology (IJCSIT), 6(2):199–206.
Luo, Z., Poon, M., Zhang, Z., Liu, Z., and Lim, A.
(2021). The multi-visit traveling salesman problem
with multi-drones. Transportation Research Part C:
Emerging Technologies, 128:103172.
Ma, Z. and Chen, J. (2023). Multi-uav urban logistics task
allocation method based on mcts. Drones, 7(11):679.
ONISR (2024). Cartographie des accidents en
france. https://www.onisr.securite-routiere.gouv.
fr/cartographie-des-accidents-metropole-dom-tom.
Accessed on 29 Sept. 2024.
Peterson, R., Buyukkocak, A. T., Aksaray, D., and
Yazıcıoglu, Y. (2020). Decentralized safe reactive
planning under twtl specifications. In 2020 IEEE/RSJ
International Conference on Intelligent Robots and
Systems (IROS), pages 6599–6604. IEEE.
Rawlings, J. B., Mayne, D. Q., and Diehl, M. (2017). Model
Predictive Control: Theory, Computation, and De-
sign. Nob Hill Publishing.
Rokach, L. and Maimon, O. (2005). Clustering meth-
ods. Data mining and knowledge discovery handbook,
pages 321–352.
Wang, Z. and Sheu, J.-B. (2019). Vehicle routing problem
with drones. Transportation research part B: method-
ological, 122:350–364.
Waze Mobile Ltd. (2024). Waze: Real-time traffic and road
information. Accessed on April 21, 2025.
Xu, C., Zhang, K., Jiang, Y., Niu, S., Yang, T., and Song,
H. (2021). Communication aware uav swarm surveil-
lance based on hierarchical architecture. Drones,
5(2):33.
Hierarchical Coordination of UAVs for Dynamic Task Assignment in Large-Scale Traffic Surveillance Missions
297
